低空三坐标雷达数据处理的虚假航迹抑制
2022-12-06李朋王晓艳左靖坤
李朋 王晓艳 左靖坤
四创电子股份有限公司 安徽 合肥 230094
引言
低空三坐标雷达是监视无人机的主要手段之一,可以实时提供距离、方位、高度、速度、航向等信息,为打击无人机的非法侦察、恐怖袭击和非法入侵提供重要的信息。由于无人机一般在低空飞行,容易受地面建筑、树木和气象杂波的干扰,产生大量的杂波,虽然信号处理采取动目标显示(MTI)、动目标检测(MTD)、恒虚警检测(CFAR)和脉冲积累等手段对杂波抑制[1],但仍会有大量的剩余杂波进入数据处理系统,最终产生虚假的航迹,严重影响雷达跟踪的性能。
为了解决上述问题,本文提出了一种低空三坐标雷达数据处理的虚假航迹抑制方法。
1 低空三坐标雷达数据处理的虚假航迹抑制方法
数据处理的流程,包括三维杂波图生成、点迹过滤、基于杂波信息的航迹关联、基于杂波信息航迹起始、机动识别、跟踪滤波、波门产生、波门计算、航迹终结、状态输出。
抑制虚假航迹的步骤主要在流程中的4个阶段中,一阶段三维杂波图的产生,根据距离、方位、俯仰,把覆盖区间划分为若干个三维空间,统计每个空间点迹的个数及密度,根据统计结果把空间分为清洁区、强杂波区两个杂波等级,并对其中的点迹标记杂波等级;二阶段点迹过滤,对杂波区点迹根据属性(幅度、方位宽度、距离宽度、高度宽度)进行过滤;三阶段基于杂波信息的航迹关联,根据杂波情况选择多假设关联还是最近邻算法;四阶段基于杂波信息航迹起始,根据杂波情况调整航迹起始准则。
1.1 三维杂波图
杂波图是雷达威力范围内杂波密度分布图,三维杂波图是对方位、距离和仰角区进行合理划分,从而形成若干单元。这种划分根据雷达俯仰波位进行的,每一个扫描俯仰波位即是一张图,这样划分方便,也利用进行统计。
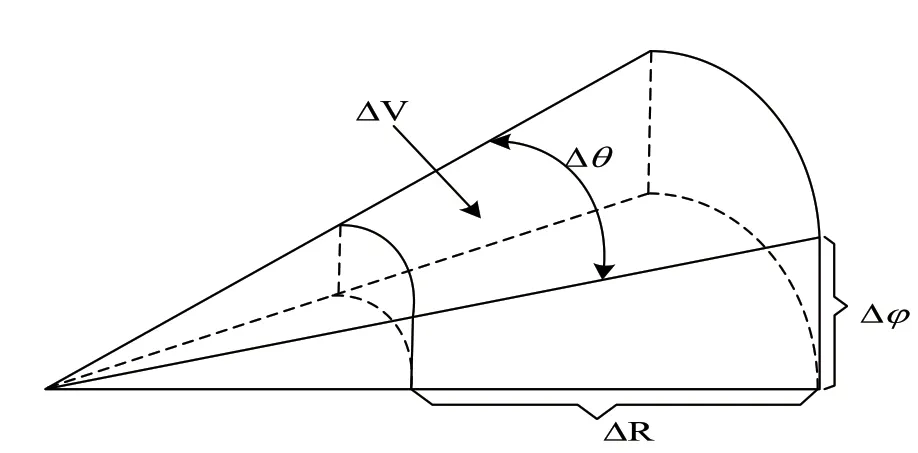
图1 三维杂波图
采用滑窗法计算杂波密度,空间单元累计至当前的一段时间内,统计落入其中的杂波数量,一般累计3到5个雷达周期。每个周期都要对杂波密度进行更新。
对于一个空间单元,第 帧杂波密度按下式计算:

式中,λk是周期内杂波密度,Nk为统计M个周期的点迹数之和,V为体积。空间区域杂波的判定根据下式

当λk和nk同时满足上式时,区域判定为杂波区,否则为清洁区。式中p为密度阈值,Τ为点迹个数阈值,nk为第k周期点迹个数。
最后,需要对落入区域中的所有点迹标记杂波等级。
1.2 点迹滤波
过滤主要针对杂波区的点迹,利用目标在雷达回波上的特征信息,如距离宽度、方位宽度、俯仰宽度和幅度等特性。设定7个参数距离宽度的最小门限Min Range Size和最大门限Max Range Size,方位宽度的最小门限Min Azimuth Size和最大门限Max Azimuth Size,俯仰宽度的最小门限Min Elevation Size和最大门限Min Elevation Size,幅度最小值Min Amplitude。
如果满足下述条件,则点迹提取通过:
目标距离尺寸 ≥ Min Range Size AND
目标距离尺寸 < Max Range Size AND
目标方位尺寸 ≥ Min Azimuth Size AND
目标方位尺寸 < Max Azimuth Size AND
目标俯仰尺寸≥ Min Elevation Size AND
目标俯仰尺寸< Max Elevation Size AND
目标幅度 > Min Amplitude
其中, AND表示与其的关系。对不满足上述条件的点,作为杂波点被滤除掉。
滤波处理可以过滤大部分杂波,如建筑物、道路上车、树林等大的目标,也可以滤除鸟、昆虫等小目标。
1.3 基于杂波信息处理关联
航迹关联算法最常用的有最近邻法(nearest neighbor,NN)[3]、多假设(multiple hypothesis tracking,MHT)[4]算法。
多假设的航迹关联算法设z(k)={zi(k)}i-1表示k时刻的量测集合。设Ωk表示k时刻所有假设的集合,是Ωk-1与z(k)的mk个量测值互联的结果。可能的互联结果是:①它是以前航迹的继续;②它是新目标的量测值;③它是虚警。
多假设算法是解决密集杂波环境下目标数据关联问题的最优算法,但存在计算量大的问题。
最近邻法是统计距离最小的测量值作为目标关联点迹,如下式:

式中d为参差,z为测量值,表示预测值,S为新息。这种方法仅适应于杂波少,目标密度不大的情况。
联合MHT和NN算法,解决因错误关联产生虚假航迹的同时,也平衡了计算量的缺点。杂波区使用MHT关联算法,清洁区使用NN算法。
1.4 基于杂波信息的航迹起始
依据杂波图情况,采用不同航迹起始准则。航迹起始通常采用逻辑法,目标连续探测到,并且关联成功,从而起始。
杂波点不具有连续相关性,杂波区采用更为严格的m/n航迹起始准测,可以避免虚假航迹的产生,但目标起始有延迟。
清洁区的航迹可以采用宽松的m/n起始准测,保证目标快速起始。
2 实验结果与分析
实验利用四创电子股份有限公司低空三坐标雷达,架设在楼顶,使用大疆无人机域pro飞行测试,采集10分钟数据,与传统数据处理算法对比,图2传统数据处理的结果,图3使用本文算法结果。
图2 传统方法
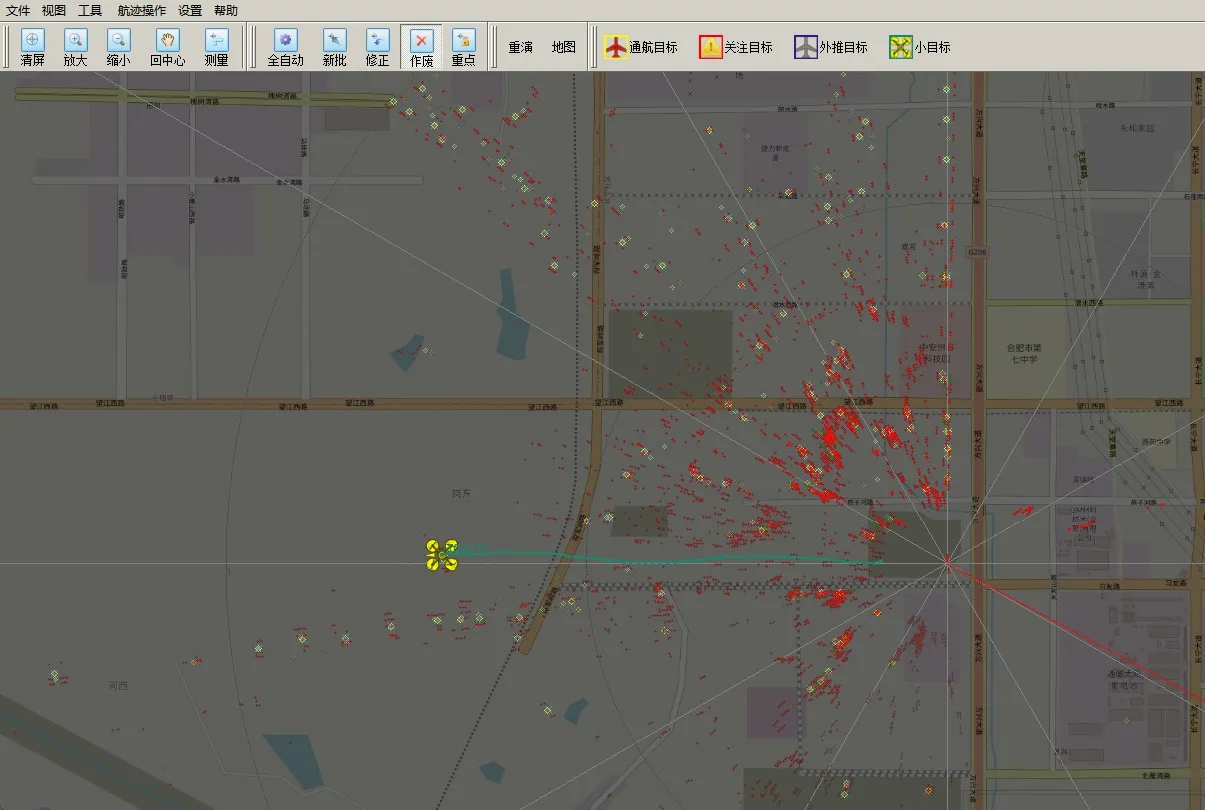
图3 本文算法处理结果
雷达架设在博微产业园内,周围有高建筑物、道路上的车辆、树等,环境复杂,雷达产生大量虚假点迹,同一组数据在不同的算法下的结果差异很大,如表1所示。
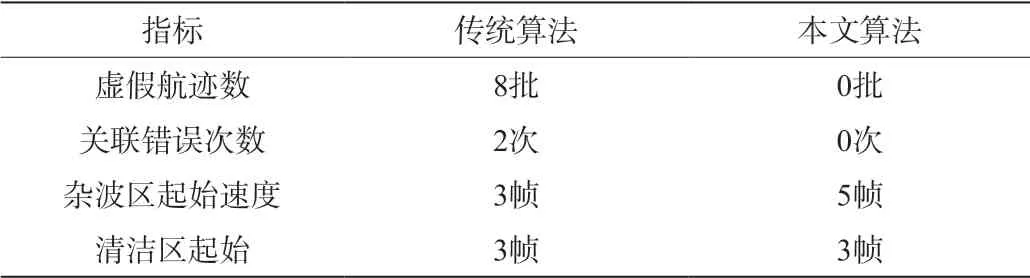
表1 算法对比结果
如果采用传统数据处理算法,树、建筑和车辆都产生了虚假的航迹,虚假航迹达到了8批。而且在杂波区容易关联错误,不能历史回溯,会造成航迹丢失。在清洁区两种方法起始速度相同,在杂波区传统算法起始速度快于本文方法。
采用本文方法,三维杂波图会把树、道路车、建筑物的区域标识为杂波区,对杂波区的点迹和航迹进行了特殊的处理,所以没有产生虚假航迹。在杂波区采用多假设航迹关联算法,关联的正确率高于传统的数据处理算法。
3 结束语
针对低空三坐标雷达在复杂环境下出现的虚假航迹多的问题,本文提出一种在雷达数据处理的虚假航迹抑制的方法。在数据处理流程中分四个阶段处理,一阶段建立三维杂波图,识别杂波区,并标记点迹的杂波等级;二阶段点迹过滤;三阶段点航关联,杂波区和清洁区选择不同的关联算法;四阶段航迹起始,根据杂波情况调整航迹迹起始准测。实验表明,所提出的方法能有效抑制虚假航迹,并在低空三坐标雷达项目中应用。
