基于多目标优化的星空认知网络鲁棒波束成形算法
2022-12-03徐启钊王子宁黄硕程铭刘笑宇
徐启钊,王子宁,黄硕,程铭,刘笑宇
(1.南京邮电大学 通信与信息工程学院,江苏 南京 210003;2.上海航天电子通讯设备研究所,上海 201109)
0 引言
卫星通信(Satellite Communication,SC)和无人机(Unmanned Aerial Vehicle,UAV)通信作为2 种重要的空间通信方式,近年来受到了越来越多的关注。其中SC 具有覆盖范围广、不受地理条件限制和传输质量高等优势,成为解决偏远地区用户“信息孤岛”不可或缺的一种手段[1-3]。而UAV 通信由于其低成本、部署灵活等优势,在应急通信、热点区域无线覆盖等领域有着广阔的应用场景。在实际应用时,UAV 一方面可以作为中继站扩展地面网络的服务范围,另一方面可以作为空中基站在三维空间中灵活移动,建立视距(Line of Sight,LOS)通信链路,从而有效地避免信号堵塞和遮挡,降低通信成本[4-5]。随着第5 代移动通信的正式商用,各种新兴技术和业务高速发展,移动接入和数据流量业务的需求量越来越大,单一通信网络已经很难满足用户的通信需求,需要多技术平台、多通信网络进行融合,满足多种业务需求。在这种情况下,综合利用SC 网和UAV 通信网的优点构建星空融合无线网络,可以为用户提供更大的通信容量,从而满足不同用户服务和垂直领域的多样化通信需求[6]。与此同时,随着频谱资源变得越来越稀缺,采用认知无线电技术(Cognitive Radio,CR)是未来无线通信的一个必然趋势[7-8],因此将认知CR 应用于星空融合无线网络构成的星空认知网络(Cognitive Satellite-Aerial Network,CSAN)中,有望成为第6 代移动通信的关键技术之一。
在CSAN 中,通常采用CR 技术中的Underly 方式实现频谱共享,其技术要点在于将卫星网络用户所接收的干扰限制在设定的阈值之下,使得UAV网络可以共享卫星网络的频谱资源,从而达到增强频谱资源利用率的目的[7]。由于星空认知网中的卫星和UAV 网络进行频谱共享,会产生网络之间的相互干扰问题,通常利用波束成形(Beamforming,BF)技术提高目标用户接收信号质量和增强对非目标用户的干扰抑制能力,实现对干扰的管理和优化设计[2]。在已知完美信道状态信息(Channel State Information,CSI)情况下,文献[9]研究了次级网络的通信质量需求和对主网络干扰的权衡问题,采用凸优化方法设计了相应的BF 算法;文献[10-11]分析了认知网络中干扰限制对中断性能的影响。虽然上述文献对认知网络的优化设计和性能分析进行了较深入的研究,但是均在假设CSI 准确已知的基础上。然而,在实际场景中,由于估计误差,终端的移动性以及反馈信道容量受限,完美CSI 通常无法获得,因此研究非完美CSI 情况下的认知网络优化问题更具有实际意义。
与此同时,在构建CSAN 系统时,希望能够实现对多个性能指标的同时优化,以满足人们对于通信质量的总体要求,因此需要利用合理的算法来实现多个性能指标之间的权衡优化。采用加权切比雪夫方法构建的多目标优化问题(Multi-objective Optimization,MOO)能够实现对多个性能指标的权衡优化[12],从而获得了多个性能指标间的帕累托解,即在可行解范围内不存在任意可行解比其所获得的函数值更优。文献[13]利用半正定松弛加权聚合和多目标遗传算法,研究了信息速率和收集功率最大化的多目标问题。文献[14]在达到安全速率要求的约束下,研究了能量收集效率与总发射功率之间的权衡。需要指出上述文献针对地面蜂窝网络中的MOO,目前CSAN 中的多目标优化仍是一个开放且具有挑战性的课题。
1 系统模型
本文研究CSAN 的下行链路通信场景,CSAN系统模型如图1 所示。其中,由地球静止轨道(Geostationary Orbit,GEO)卫星组成的卫星网络作为主网络,为s个主用户提供通信服务;UAV 网络作为次级网络,采用多播传输模式,为地面k个次级用户服务。并且卫星配备Ng个馈源的单反射面天线,UAV 搭载Nu根天线的均匀平面阵列(Uniform Planar Array,UPA)[16],以获得较高的阵列天线发射增益,其他终端均采用单天线。同文献[17]一样,由于主用户不属于UAV 的网内用户,考虑UAV 可以获得次级用户的完美CSI 和主用户的非完美CSI。此外,由于主次网络间的频谱共享,考虑UAV 对主用户的干扰,而由于卫星链路损耗较大,卫星对次级用户的干扰可以忽略不计[18]。
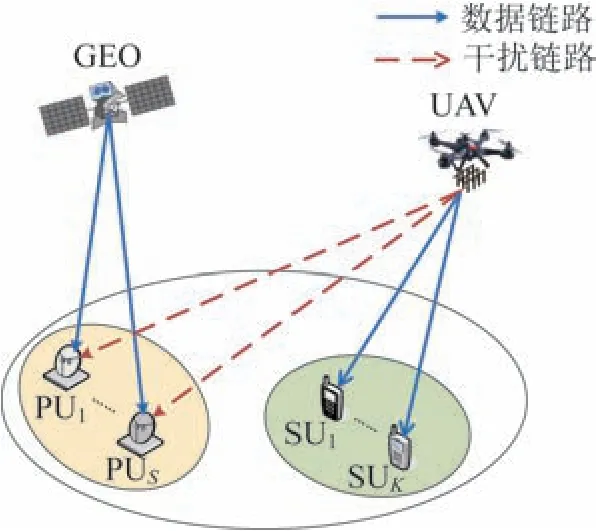
图1 CSAN 系统模型Fig.1 System model of CSAN
UAV 向次级用户发送信号s(t),且满足=1,经过发射BF权矢量w∈CNu后,UAV 发送的信号为y(t)=ws(t),则次级用户接收到的信号和主用户接收到的干扰可分别表示为

式中:hk、gs分别为UAV 至第k个次级用户和第s个主用户的信道矢量,右上角标H 为矩阵的共轭转置;nk(t)和ns(t)为均值为0、方差为σ2的加性高斯白噪声(Additive White Gaussian Noise,AWGN),其中方差σ2=κBT,κ、B、T分别为玻尔兹曼常数、噪声带宽和用户处噪声温度。
根据式(1)和式(2),可以分别得到次级用户的输出信噪比(Signal-To-Noise Ratio,STNR)和主用户的干噪比(Dry-To-Noise Ratio,DTNR),表达式如下:

因此,UAV 到次级用户的可达速率可表示为
(3)对于PC端上位机,实时切换用户的数据显示以及超出设定值的数据,提示窗口功能测试表,通过对系统的多次测量,提高整体的稳定性。上位机显示、窗口提示测试结果如表3所示。

UAV 采用Nu=N1×N2根天线的均匀平面阵(Uniform Planar Array,UPA),N1和N2分别为沿X轴和Y轴均匀放置的天线数,天线间的距离分别为d1和d2。平面阵的几何模型如图2 所示,根据文献[19]可知,UAV 发送信号到次级用户的下行链路信道矩阵H∈CN1×N2可以表示为

图2 UPA 的几何模型Fig.2 Geometrical model of UPA

式中:b(θ,φ)为天线阵列增益;ρi、A(θi,φi)分别为第i(i=0,1,…,N)条路径的路径损耗和阵列导向矩阵;N为非视距(Non Line of Sight,NLOS)传输路径的数量。

式中:bmax为最大的天线阵列增益;SLL为旁瓣增益;bx(θ,φ)和by(θ,φ)为X轴和Y轴的天线阵列增益,分别表示为

其中,式(8)中的视距分量占主导地位,同时信道包含多条非视距分量。视距分量的路径损耗可以为|ρ0|2=其中d0为UAV 到次级用户的传输距离,f为信号的频率,c0为光速。非视距分量的路径损耗|ρi|2通常要比|ρ0|2小5~10 dB。
然后,定义向量rm,n=[xm,yn,0]T为第(m,n) 个阵列单元的位置,定义d=[cosφsinθ,sinφsinθ,cosθ]T为UPA 到用户的方向的单位矢量从UPA 到用户到达角的单位矢量,考虑以阵列中心为阵列平面原点,则第(m,n)个阵列单元相对于阵列平面原点的相位偏移可表示为

则在式(8)中,阵列导向矩阵A(θ,φ)中的第(m,n)个元素可以表示为
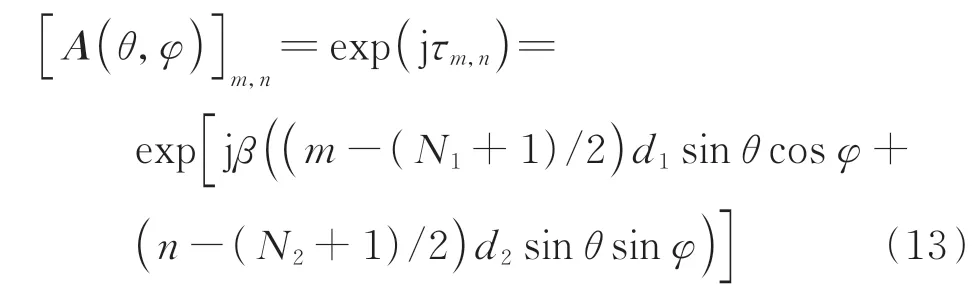
因此,阵列导向矩阵可以表示为

为了简化计算,将三维信道矩阵转化为信道矢量,则UAV 到次级用户的信道矢量h∈CNu可表示为

式中:w、θm分别为半功率波束宽度和主瓣的波束宽度;Gm、Gs分别为主瓣增益和旁瓣的最大平均增益。
在研究的认知网络模型中,次级用户是UAV网络的网内用户,因此考虑UAV 可获得次级用户的完美CSI。而由于主用户不属于UAV 网络内的用户,故UAV 难以获得其完美CSI。因此,UAV 到主用户的信道矢量g可建模为[21]

基于上述系统模型,将提出基于多目标的鲁棒波束成形算法。
2 基于多目标的鲁棒波束成形算法
考虑到UAV 次级网络在不同的应用场景下,需要采用不同的优化准则。因此,在建立用户可达速率最大化和UAV 发射功率最小化2 种单一准则的基础上,提出了一种基于多目标优化的鲁棒波束成形算法,获得可达速率和发射功率间的帕累托解,实现2 种性能指标间的权衡优化。
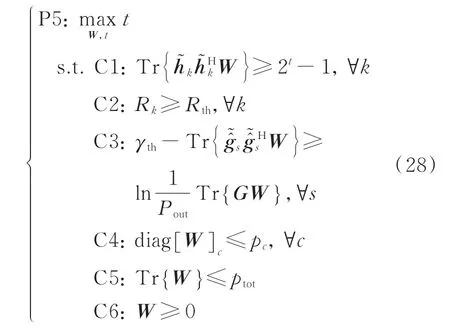
首先,根据式(7),建立次级用户可达速率最大化问题表达式,可表述为

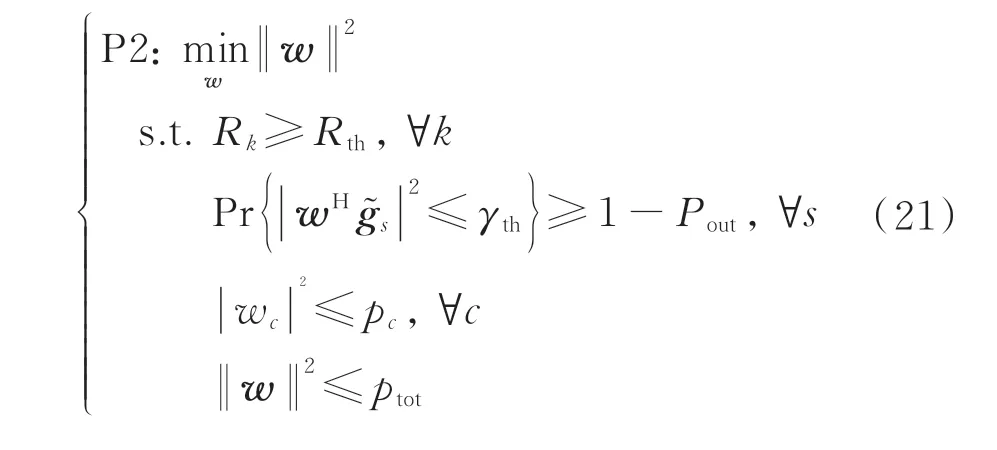
式中:Rk为第k个次级用户的可达速率;Rth为可达速率阈值;γth为主用户处的干噪比(Interference to Noise Ratio,INR)阈值;Pout为中断概率阈值;pc为单天线功率阈值;ptot为总功率阈值。
其次,建立如下UAV发射功率最小化问题公式:
最后,通过利用帕累托最优性和加权切比雪夫方法构建MOO,可以表述为

综上所述,问题P3 的完全帕累托集合可以通过改变λj的值来获得。可以看出,当λj=1 时,问题P3可以表示为问题j。通过观察,P1—P3 属于非凸问题,难以求解。因此,考虑利用概率公式将原有的概率约束转化为凸约束,并对问题进行半正定松弛,通过SDP 对上述问题进行求解。概率约束公式可以表示为
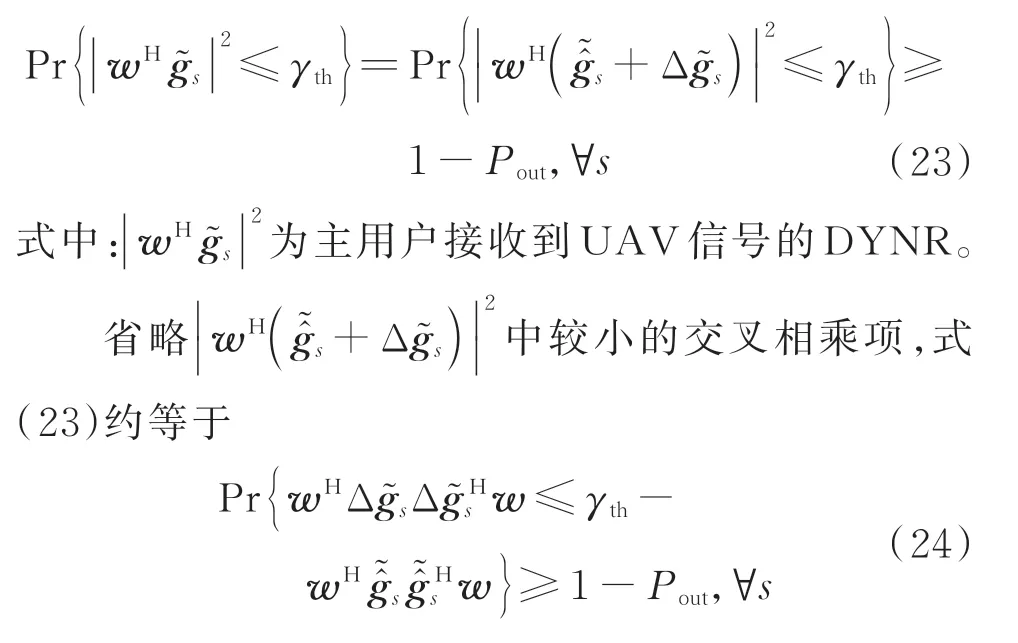

定义W=wwH,问题P1~P3 中的概率约束最终可化简为凸约束:

将转化后的凸概率约束带入P1,并引入松弛变量t,则P1 可以转化为

显然,非闭和形式的概率约束已转化为凸约束。由于定义W=wwH,因此引入了非凸约束rank(W)=1。但问题P4 在数学上依然难以求解,因此,采用半松弛定松弛重构有秩1 约束的问题P4,将其转化为易于求解的SDP 问题,则P4 可以为转化为
同理,P2 可以转化为

通过引入松弛变量τ,P3 可以转化为

该优化问题的第1 条约束为线性矩阵不等式约束,第2 条约束为二阶锥约束。根据文献[22]可知,式(31)的算法复杂度可以表示为

式中:Cfact为因式分解矩阵的计算成本,Cfact=n3;Cform和Cfact中的nC=O(KnumNrowNcol),其中Knum为矩阵的数量,Nrow为矩阵的行数,Ncol为矩阵的列数。
由于问题P5~P7 的约束仅为线性矩阵不等式约束和二阶锥约束,根据式(32)可知,所提MOO 算法复杂度为

所提出的多目标优化BF 算法是基于用户可达速率最大化准则和UAV 发射功率最小化2 个单一准则构建,并利用概率公式和半正定松弛方法解决了问题的非凸性,得到容易求解的重构问题P5~P7,并利用高斯随机化方法获得权矢量w。通过对问题P7 的求解可获得可达速率和发射功率间的帕累托解,实现2 种性能指标的权衡优化,满足UAV次级网络在不同的应用场景下对不同优化准则的需求。
3 仿真结果与分析
通过仿真结果验证所提算法的有效性,并证明所提算法的优越性。考虑单个UAV 在有限范围内服务K=4 个次级用户,其位置分别为(30 m,-20 m)、(55 m,-40 m)、(-35 m,-20 m)、(-45 m,-50 m),假设该范围内还存在s=3 个主用户,考虑UAV 到主用户的信道估计误差服从均值为μg=0、标准差为σg=0.1 的高斯分布,其信道矢量估计值所对应的位置分别为(20 m,70 m)、(0 m,50 m)、(-20 m,60 m)。主用户处的DYNR阈值取γth=-30 dB,单天线功率阈值pc=0.25 W,总功率阈值ptot=15 W,中断概率Pout=0.05,其他系统参数见表1。此外,将文献[23-25]中的非鲁棒、最大比传输(Maximum Ratio Transmission,MRT)和迫零(Zero Forcing,ZF)算法作为比较方案。

表1 系统仿真参数Tab.1 Simulation parameters of the system
为验证所提基于多目标鲁棒波束成形算法的有效性,仿真了归一化BF 权矢量三维方向图和俯视图,如图3 所示。所提算法能使波束主瓣方向指向次级用户;同时,在主用户的不确定区域产生较深的零陷,零陷处的归一化平均增益仅为-50 dB。这说明所提算法在确保UAV 与目标用户通信质量的同时,充分抑制对其他非目标用户的干扰,验证了所提鲁棒波束成形算法的有效性。

图3 BF 权矢量图Fig.3 Diagram of the BF vector
为了直观的体现所提多目标算法的均衡性,多目标算法在不同加权参数、不同策略下各性能指标与DYNR 阈值关系如图4 所示,即不同策略下发射功率和可达速率随DYNR 阈值变化关系图。由图可知,当λ=0 时,MOO 等价于最小可达速率最大化优化问题,此时,发射功率最大,可达速率最大。当λ∈(0,1)且逐渐变大时,MOO 的解向最小发射功率优化问题的解靠近,当λ=1 时,MOO 等价于最小发射功率优化问题,此时,发射功率最小,可达速率最小。说明多目标通过权重λ可以体现优化问题的优先程度;对比图4(a)和 图4(b)发 现,当DYNR 一定、λ变化时,发射功率和可达速率同时变大或变小,体现了两者之间博弈,因此证明了多目标算法的均衡性。
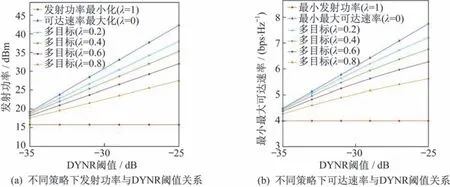
图4 不同策略下各性能指标与DYNR 阈值关系Fig.4 Curves of two performance indicators versus the DYNR threshold under different strategies
为了更直观地体现所提算法的鲁棒性,鲁棒算法和非鲁棒算法在1 000 次信道情况下,主用户处INR 分布直方图如图5 所示。由图可知,对比2 种算法,鲁棒算法低于阈值的统计数要远大于非鲁棒算法低于阈值的统计数。可见,相较于非鲁棒算法,所提鲁棒算法可以更好地适应随机误差信道,具有较好的鲁棒性,能够在信道条件较差的情况下实现可靠通信。

图5 DYNR 分布直方Fig.5 Distribution histograms of DYNR
最小发射功率与主用户DYNR 之间的关系如图6 所示。由图可知,DYNR 随发射功率上升而上升,在相同最小发射功率下,基于多目标的鲁棒波束成形算法的主用户DYNR 最低,并能够一直满足主用户的干扰阈值,而其他2 个算法方案随着功率增大会对主用户产生较大的干扰。综上所述,所提算法具有优越性。

图6 DYNR 与发射功率关系Fig.6 DYNR versus transmitted power
改变加权参数λ时,发射功率和可达速率关系如图7 所示。观察可知,一方面次级用户最小速率的最大值是关于UAV 最小发射功率的单调递增函数,同时,通过与ZF 方法、MRT 方案比较,在相同的最小发射功率下,所提算法可以有效地提高次级用户的可达速率;另一方面,当次级用户在相同的可达速率下,所提算法消耗更低的功率,验证了所提算法比ZF 和MRT 方案具有更好的性能。
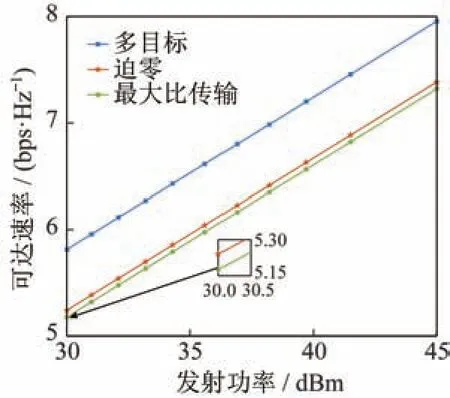
图7 不同策略下发射功率和可达速率关系Fig.7 Achievable rate versus transmit power under different strategies
4 结束语
在CSAN 场景中,考虑到UAV 只能获得主用户的非完美CSI,本文提出了一种基于多目标的鲁棒波束成形算法。首先建立了满足概率约束的次级用户可达速率最大化和UAV 发射功率最小化的MOO,并利用概率公式和半正定松弛等方法解决了原优化问题的非凸性。同时利用高斯随机化方法得到最优的鲁棒波束成形权矢量,获得了2 种性能指标间的帕累托最优权衡,最后仿真结果验证了所提算法的鲁棒性相比于现有方案更具有优越性。
