固液捆绑火箭发动机健康诊断技术
2022-12-03杨欣茹王猛高莉辛高波孙平党锋刚
杨欣茹,王猛,高莉,辛高波,孙平,党锋刚
(1.上海宇航系统工程研究所,上海 201109;2.上海航天技术研究院,上海 201109;3.西安航天动力研究所,陕西 西安 710100)
0 引言
液体火箭发动机健康诊断技术是提高运载火箭发射可靠、安全的关键技术之一,近年来一直受到各航天大国的高度重视。
美国的液体火箭发动机故障监测系统以航天飞机主发动机(Space Shuttle Main Engine,SSME)应用为代表,从20 世纪70 年代简单的红线关机系统逐渐向集成化、平台化的趋势发展[1-4]。2004 年设计的先进健康管理系统通过箭载健康管理计算机形成了实时振动监控、光学羽流异常监测和基于线性发动机模型监测的3 个实时故障监测子系统[5-6],有效提高了SSME 在发射、升空阶段的可靠性和安全性。近年来,美国在空间运载计划和集成空间运输计划指导下,相继进行了多个先进健康监控或健康管理系统的研发,包括火箭发动机健康管理系统、集成健康监控系统、智能集成管理系统等多种系统框架或方案[7-8]。美国的火箭发射系统大多配备牵制释放系统,液体火箭发动机的健康检测也得到了广泛应用。如猎鹰9 号火箭,其一级使用9 台Merlin 液氧煤油发动机,发射期间一级在发动机点火后仍系留于地面,自动检测系统确认发动机工况,若检测到任何异常将执行自动安全关机,大幅减小了发动机起动失败和性能不足的风险。俄罗斯火箭发动机研制过程中研发了故障监测系统[9-10]。以RD-180 火箭发动机为例,故障监测系统在发动机起动前、起动过程和主级工作中均进行监测;起动前监测流量调节器和燃料节流阀传动轴初始和最终状态、燃料隔离阀蝶盘状态;起动过程中监测起动箱增压气路、推力室燃料阀打开控制气路压力信号计、涡轮泵转速;主级工作过程中监测涡轮泵转速和燃料预压泵转速、氧化剂泵转子轴向位移、主涡轮出口燃气温度。RD-180 火箭发动机采用分级起动方式,初级工况监测正常后才继续起动和发射流程。
我国对液体火箭发动机健康监控系统的研究多集中于地面试车及地面仿真[11-19],目前国内尚无在火箭发射中应用发动机健康诊断系统的先例。2002 年,西北工业大学于潇等[11]研制了一种液体火箭发动机涡轮泵状态监测与故障诊断系统,并通过了2 次发动机热试车考核。2008 年,西安航天动力研究所马红宇等[14]设计了液氧煤油高压补燃发动机地面试车故障监控系统。2019 年,西北工业大学赵万里等[18]提出了一种递归结构识别(Recursive Structure Identification,RESID)算法用于液体火箭发动机故障诊断。此外,国防科学技术大学针对新一代大推力液体火箭发动机设计开发了地面试车故障实时检测与诊断系统[20-21],并多次通过了地面热试车的考核。2022 年CZ-6A 运载火箭作为我国新一代固液捆绑火箭,在国内火箭运载领域率先采用了箭上液体发动机健康诊断技术,并圆满完成了首次飞行试验任务,标志着国内运载火箭箭上液体发动机健康诊断技术取得重大突破。
1 发动机健康诊断方案设计与实现
1.1 总体点火时序设计
在固液捆绑火箭总体构型中,运载火箭芯一级采用我国新一代液氧煤油发动机,助推器采用大推力固体发动机。对于液体发动机,若发动机起动失败或性能不满足要求,只要火箭不离开发射台,均可对液体发动机实施紧急关机,以保证箭体、卫星载荷及发射设施的安全。但是固体发动机一旦点火则不可逆,无法在发射台上实施紧急关机。
根据固液发动机推力建立时间的不同,在固液捆绑火箭总体设计时采用芯级发动机先点火、固体发动机后点火的方案。参考国外运载火箭牵制释放的原理,在固体发动机点火前对芯级发动机进入额定工况后进行健康诊断,判断发动机工作状态,若工作正常则实施固体发动机点火,火箭起飞,否则紧急关闭芯一级发动机,中止发射。这种点火时序设计方案充分发挥固液捆绑火箭综合优势,极大地提高固液捆绑火箭的点火安全性,保证了箭体、卫星载荷及发射场地面设施的安全。
1.2 发动机健康诊断系统组成
液体发动机健康诊断系统主要由健康诊断控制器、综合控制器、芯一级发动机传感器及变换器组成,如图1 所示。芯一级发动机传感器及变换器上电后全程采集发动机参数,并将参数传输至箭上健康诊断控制器。健康诊断控制器以点火指令时刻为基准,在发动机健康诊断区间内,判定芯级发动机是否工作正常,若异常则向地面测发控系统及箭上综合控制器发出紧急关机信号。综合控制器以点火指令时刻为基准,执行芯级发动机点火程序,当接收到紧急关机指令时,执行芯级发动机紧急关机程序,同时停发固体发动机点火指令。

图1 发动机健康诊断系统组成Fig.1 Structure of the engine health diagnosis system
1.3 健康诊断算法
1.3.1 诊断参数
液氧煤油发动机系统一般由火药启动器、电爆管、涡轮泵、推力室、燃气发生器、蒸发器、活门、机架、导管及控制组件等组成。发动机起动过程中的故障大部分是由火药启动器、电爆管和活门引起,在稳态工作段多易发生泄漏、涡轮泵故障等问题,在关机过程中则易出现活门关闭不严、不动作等问题,造成的后果有性能下降、部件损坏甚至发动机爆炸。液体发动机故障模式见表1。
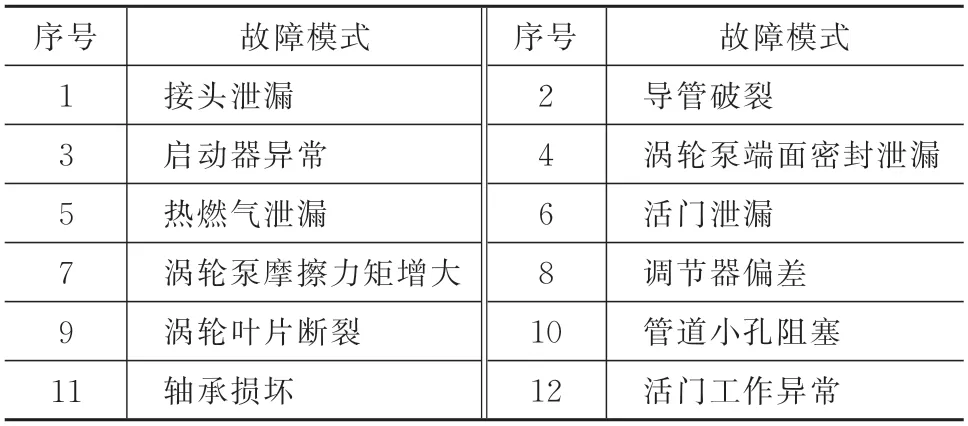
表1 液体发动机故障模式Tab.1 Malfunction modes of liquid engine
每一种故障对应一定的故障特征参数,故障发生时故障信息就会通过特征参数表现出来。根据液体发动机的主要故障模式,其主要特征参数包括转速参数和压力参数。各健康诊断参数表征发动机状态情况见表2。

表2 发动机健康诊断参数Tab.2 Parameters of engine health diagnosis
1.3.2 诊断时间
芯一级发动机起动完成后火箭仍停留在发射台,在此期间内健康诊断系统采集发动机参数信息,根据诊断算法,自动得出发动机是否正常起动的结论。
液体发动机点火后停留时间越长,越有利于提高诊断结果的可靠性。但停留时间过长,一方面增加了发动机的工作时间,对提高诊断可靠性的作用有限;另一方面造成已加注推进剂的浪费,影响火箭运载能力。因此,综上所述需选取合理的停留时间。
根据芯级发动机起动特性,发动机起动时由于涡轮泵转速等主要参数变化剧烈,难以准确检测、判断其参数状态是否异常,因此此时不进行健康诊断,防止误关机。根据历次发动机试车(含极限边界试车)及其飞行数据统计,发动机在起动后2.40 s内完成起动过程进入额定工况。各诊断参数进入额定工况的时间见表3。

表3 各参数进入额定工况的时间统计Tab.3 Time statistics of each parameter entering the specified working condition
为提高诊断结果可靠性,同时避免推进剂浪费,在芯级发动机起动2.50 s 后发动机参数波动变缓,发动机进入稳态工作阶段,此时健康诊断系统介入,采集发动机关键特性参数,对发动机工作情况进行分析判断,健康诊断结束时间为发动机起动2.80 s 后,诊断时长0.30 s,如图2 所示。在芯级发动机工作正常情况下,固体发动机在液体发动机起动3.00 s 后实施点火,火箭起飞。

图2 发动机健康诊断诊断时间要求Fig.2 Time requirement of engine health diagnosis
1.3.3 诊断算法
发动机健康诊断系统要求在较短的时间内判别出发动机工作状态,因此选择算法简单、运算量小的红线检测算法。发动机传感器的安全带设置是红线算法的核心和难点,安全带过窄可能造成误关机,过宽则敏感度不足,不能及时检测到故障。为了在避免误关机的情况下尽早发现故障,健康诊断算法在设计时采用“中心值+上下偏差”给定参数安全带。安全带中心值采用发动机工艺验收试车时的均值,上下偏差则根据不同入口压力和温度、测量误差、信号噪声等干扰因素设定,且为避免误关机留有一定的安全余量。
为提高诊断可靠性,在红线检测方法中,选定的检测参数有3 种状态:正常、异常和剔除。正常状态是指参数在安全带内;异常是指参数超出安全带,但在传感器量程范围内;剔除是指参数超出量程范围。发动机健康诊断算法设计原则为既要保证发动机的故障能有效诊断出来,同时又不能因误诊断而导致发动机误紧关。故在进行健康诊断算法设计时,采用多参数联合诊断算法,确保诊断算法的可靠性,如图3 所示。主要诊断逻辑如下:①各路诊断参数首先进行剔除判别,若参数超过传感器量程则进行剔除;②若参数在量程范围内,则进行参数安全带判别,若参数连续3 次超过要求的安全带,则认为该参数异常;③若有3 个及以上的参数同时异常,则认为发动机异常。
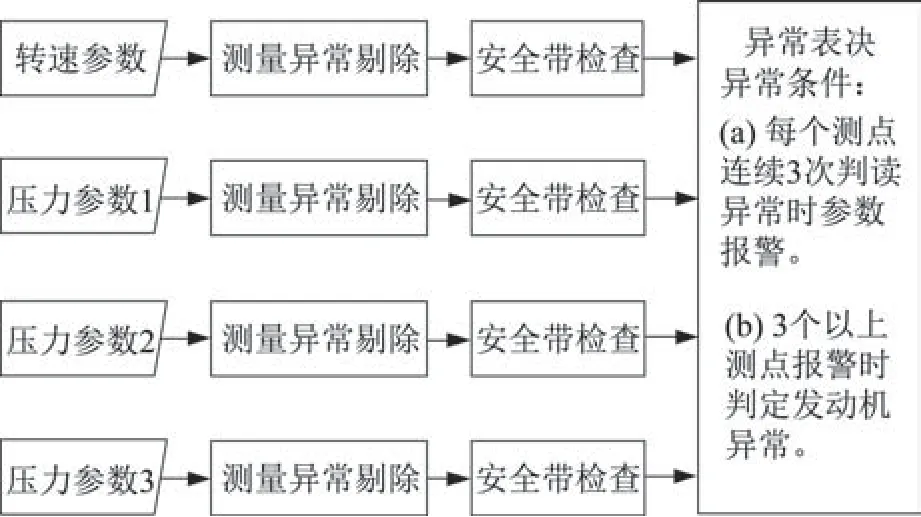
图3 发动机健康诊断算法逻辑Fig.3 Logic diagram of the engine health diagnosis algorithm
1.4 健康诊断控制器冗余设计
为提高健康诊断系统可靠性,箭上进行发动机参数诊断的控制器采用三冗余设计。控制器内的3 个主控采样模块运行功能相同的软件,接收来自地面设备发出的点火信号,独自进行数据采样及参数诊断,完成发动机关键状态参数采集及诊断功能,最后通过硬件进行3 取2 处理,结果分别输出至综合控制器和地面测发控系统。健康诊断控制器功能架构如图4 所示,硬件架构如图5 所示。
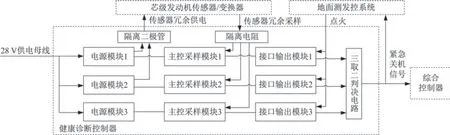
图4 健康诊断控制器功能架构Fig.4 Functions of the health diagnosis controller
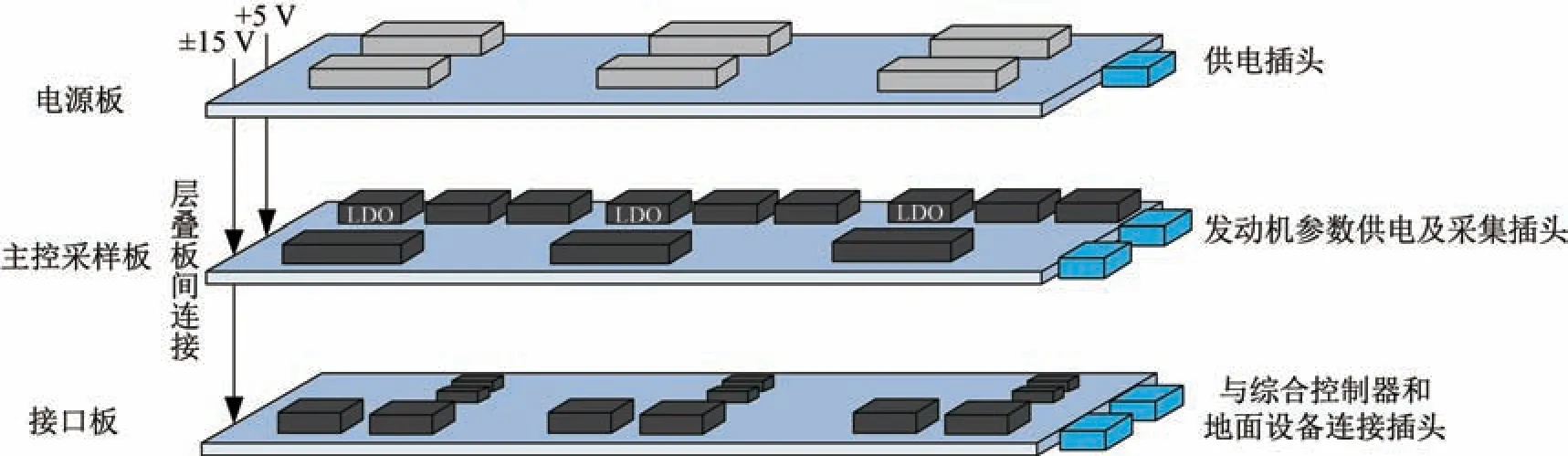
图5 健康诊断控制器硬件架构Fig.5 Hardware architecture of the health diagnosis controller
电源模块包含电源子模块1、电源子模块2 和电源子模块3,这3个子模块相互独立,结构完全一致,主要由滤波器和DC/DC 模块组成。每个电源子模块均产生2 档电源:±15、±5 V,其中±15 V 为运算放大器和AD 采样电路提供电源,±5 V 为其余控制电路供电。为外部发动机供电的±15 V 由电源子模块1 和电源子模块2 并联冗余供电,即使一路±15 V 失效,另一路仍能给发动机供电,以保证供电可靠性。
主控采样模块是健康诊断控制器的核心,由3 个采样子模块组成,形成三模冗余,3 个子模块完全一致。主控采样模块主要负责发动机各参数的采集与处理、地面设备点火指令的接收、向综合控制器发送紧急关机指令等。每个采样子模块接收到接口模块发来的以3 取2 表决后的点火指令为时间基准,在诊断区间内对发动机和传感器的各参数进行采集、处理,判断发动机和传感器是否正常工作,若出现异常,则向接口模块发出紧急关机指令。接口模块是健康诊断控制器和地面设备、综合控制器之间的信号传递模块,主要是接收地面设备的点火指令、发送紧急关机指令。接口模块通过三路独立的光耦接收点火信号。接口模块内设有由3 个固态继电器组成的3 取2 表决电路,将3 个主控采样模块各自输出的紧急关机信号通过硬件表决,输出最终的紧急关机信号。
2 试验验证情况
为考核发动机健康诊断系统方案及单机设计的正确性,箭上健康诊断系统参与发动机地面试车试验考核。地面试车考核按2 种发动机工况进行开展:发动机降工况试车和发动机正常试车。前者模拟发动机工况下降工况,检查箭上健康诊断系统对发动机故障诊断并实施紧急关机工作情况;后者模拟发动机正常工况,检查箭上健康诊断系统正常工作情况。地面试车时,发动机健康诊断区间设置为试车全程诊断。
2.1 发动机降工况试车
试车时间510 s,前400 s 为额定工况,400~450 s进行高工况考核,490 s 开始降工况关机,发动机试车工况变化如图6 所示。发动机降工况后,健康诊断参数超出安全带范围,健康诊断控制器发出紧急关机信号,考核了箭上健康诊断系统对发动机故障情况的适应性。参数曲线如图7 所示。
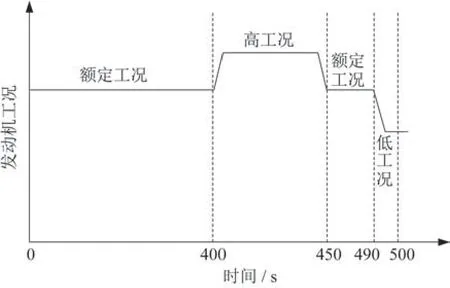
图6 发动机试车工况变化情况Fig.6 Schematic diagram of the engine test condition change

图7 变工况下的健康诊断参数曲线Fig.7 Curves of the health diagnosis parameters under the variable test condition

续图7 变工况下的健康诊断参数曲线ContinuousFig.7 Curves of the health diagnosis parameters under the variable test condition
2.2 发动机正常试车
试车过程中转速参数、压力参数1、压力参数2、压力参数3 曲线如图8 所示。进入诊断区间后,所有诊断参数均在安全带范围内,未发生漏紧关、误紧关现象。通过发动机试车试验,验证了系统间接口协调匹配性及发动机健康诊断策略设计、软件实现的正确性和有效性。

图8 正常工况下的健康诊断参数曲线Fig.8 Curves of the health diagnosis parameters under the normal test condition

续图8 正常工况下的健康诊断参数曲线ContinuousFig.8 Curves of the health diagnosis parameters under the normal test condition
2022 年3 月29 日,首次采用的发动机健康诊断系统圆满完成了新一代固液捆绑运载火箭CZ-6A 首飞任务,进一步验证了发动机健康诊断技术设计方案的正确性。经对遥测数据分析,在诊断区间内,健康诊断控制器3 块CPU 采集的数据一致性较好。各参数均在安全带内,未发出紧急关机信号。
3 结束语
本文对固液捆绑火箭中固体发动机点火后不可逆的特点,首次采用了一种箭上发动机健康诊断系统。经飞行试验验证表明,发动机健康诊断系统方案合理可行,大幅提高了固液捆绑火箭的点火安全性。该方案可以作为其他运载火箭或航天器发动机健康诊断系统设计的参考。
