天玑骨科手术机器人的临床使用风险分析与对策探讨
2022-12-02杨倩倩丁立祥郭大为胡竞竞郭宇阳
杨倩倩,丁立祥,郭大为,胡竞竞,郭宇阳
国务院在《中国制造2025》及“十三五”规划纲要等规划性指导文件中明确提出,要重点发展医用机器人等高性能诊疗设备,积极鼓励中国国内医疗器械的创新[1,2]。习近平总书记指示医疗设备是现代医疗业发展的必备手段,要加快高端医疗设备国产化进程,推动民族品牌企业不断发展[3]。天玑骨科手术机器人是中国自主研发的一款高端骨科手术机器人,可以应用于四肢、骨盆骨折、脊柱退行性病变等不同类型的骨科手术[4,5]。虽然它具有植入物定位精度高、创伤小和辐射暴露低等优点,但是其作为Ⅲ类医疗设备具有的较高固有风险和使用风险也不能忽视。美国紧急医疗研究机构 (Emergency Care Research Institute,ECRI)发布的《2020年十大医疗技术安全隐患》中指出,未完成风险评估和分析而执行机器人手术操作可能导致非预期的后遗症等严重手术事故[6]。
笔者研究通过对天玑骨科手术机器人失效模式分析,评估其使用过程中可能出现的风险及危害性,再应用鱼骨图法从人员、设备、方法、环境四个方面分析找出导致风险的影响因素,进而制定和落实相应的风险控制策略,以保障其在手术中的安全性和有效性,具有重要的临床应用意义和参考价值。
1 天玑骨科手术机器人的工作原理
天玑骨科手术机器人系统由主控台车、光学跟踪系统和主机与机械臂三部分组成(图1),分别对应感知、规划和执行这三个手术操作阶段。在感知阶段主控台车对手术部位影像进行采集和处理,在手术路径规划阶段,医生根据已处理的图像规划手术路径,摆放示踪器以标定手术路径的位置坐标,从而建立手术部位的大坐标系和小坐标系,每个坐标系有4 个定位点,需要软件识别确定每个定位点的中心和序号,从而设计建立机械臂的运动路径[7,8]。在执行阶段,医生输入操作指令控制机械臂按照设定好的路径运动到指定手术部位。为了防止机械臂运动过程中出现偏差,需要通过光学相机实时跟踪机械臂的运动位置,保证实际运行路径与设计路径相一致。
2 应用失效模式和效果分析法评估天玑骨科手术机器人风险
如上文所述,天玑骨科机器人由多个部件组成,每个或几个部件的故障都有可能导致设备整体出现宕机等功能故障,最终会转化为对手术患者的实质危害。为了识别评估天玑骨科手术机器人功能故障导致的潜在风险及其危害性,通过收集和分析厂家的故障报告及参考借鉴刘延武[9]制定的呼吸机失效模式分析表,应用失效模式和效果分析法(failure mode and effect analysis,FMEA)分析天玑骨科手术机器人各个部件所对应的失效模式并评估风险危害性(表1),该表采用层次结构,综合考虑不同部件失效可能导致的局部效应、次级效应和终末效应。其中局部效应指该失效模式对应的报警信息,次级效应指失效模式对应的功能异常输出,终末效应指失效模式对患者手术的具体影响。通过分析发现,危害性最高的风险为导航定位工具失效导致的机械臂运动轨迹偏差,会直接伤害患者而导致手术事故发生。
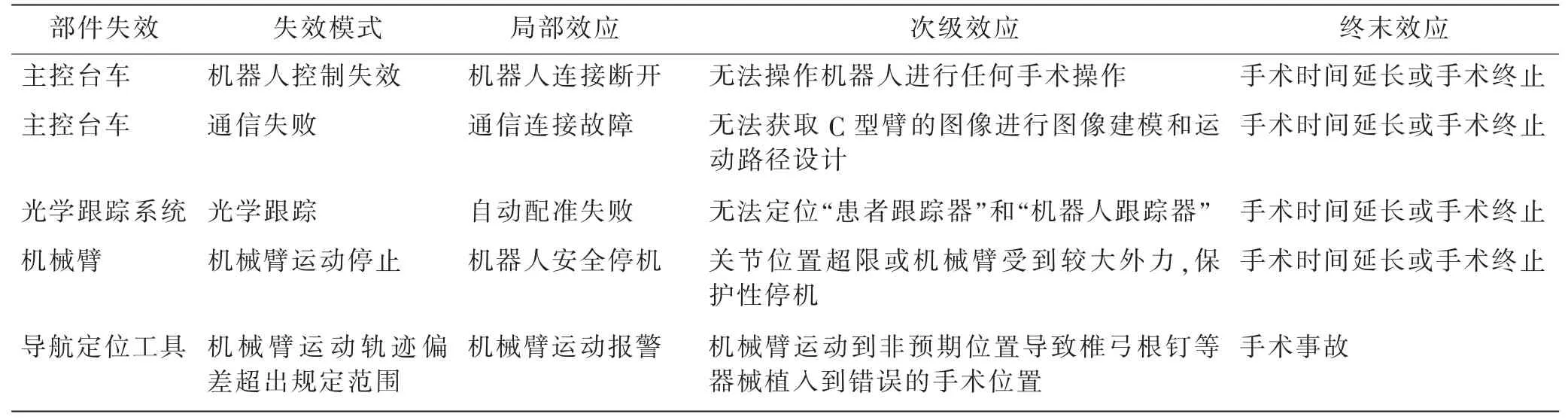
表1 天玑骨科手术机器人失效模式分析表Tab.1 Failure mode analysis of TIANVI orthopedic surgery robot
3 应用鱼骨图法分析天玑骨科手术机器人的风险要素
为了减少天玑骨科手术机器人的潜在风险和危害,需要分析识别相应的各项风险要素。通过参考产品说明书及相关文献资料,并沟通咨询厂家工程师及相关医院的临床使用者,从设备、人员、环境和方法四个方面深入细化,将分析结果以鱼骨图分布态势展开,绘制成清晰明了的天玑骨科手术机器人风险要素分析鱼骨图(图2)。
4 制定天玑骨科手术机器人风险管理措施
通过鱼骨图分析发现天玑骨科手术机器人不仅存在技术方面的固有风险,其临床使用安全还受人为操作、消毒灭菌、使用环境等诸多因素影响。需要骨科大夫、手术室跟台护士、供应室消毒护士、医工处工程师和设备厂家共同协作,从护理配合、消毒灭菌、质量控制维护及应急处理等多个使用环节入手,针对风险分析和评估结果,制定并实施相应的风险管理措施。
4.1 护理配合环节
天玑骨科手术机器人具有复杂精细的器械结构和特殊的操作方法,对手术间布局、时间分配、人员职责及流程均提出了更高的要求,良好的手术效果不仅需要医生精准的操作,还需要护士提供高质量的手术护理配合,在手术前辅助医生进行天玑骨科手术机器人布局摆位,选择并组装程序相匹配的导航定位工具包。手术过程中要随时检查光学跟踪相机视野是否被遮挡并确保机械臂运动路径不被阻挡,以保证机械臂运动轨迹与设计运动路径相一致。
4.2 消毒灭菌环节
因为天玑骨科手术机器人导航定位工具直接与患者组织接触,所以每次使用后需要进行高水平消毒灭菌。每种导航定位工具包的部件均有独立的编号,术后应将不同工具包的部件分别收集,以免造成机械臂在下次手术中因导航精度误差过大、偏离预定轨道而造成患者损伤。
为了保证每一件器械都能充分灭菌,需要事先将这些器械拆解至最小单元(如基座固定螺栓、弹簧),将不能拆卸的螺栓拧松至最大行程(如引导器固定螺栓、万向连接器的紧固螺丝)。干燥环节应用气枪吹干而非用毛刷或软布擦洗反射球,以避免划伤、破坏其表面而影响光学导航准确度。如果在消毒检查环节发现器械出现破损、断裂、变形、连接不牢固等情况,应立即中止使用并将整套工具包返厂更换。
4.3 质量控制环节
如上文所述,天玑骨科手术机器人危害性最高的风险为超出规定范围的机械臂运动轨迹偏差,该风险多源于天玑骨科手术机器人各部件的长期磨损和老化。为了及时地识别该风险,厂家工程师每半年会应用专用检测工具验证机械臂运动轨迹精确度,专用检测工具包括模拟人体脊椎结构的测试工装和模拟骨科植入物的探针(图3)。验证过程为机械臂根据规划好的运动轨迹,将探针按照先后顺序分别通过工装的左侧和右侧入口接触到工装下部模拟患处的小白球(图4)。若这两次探针均能接触到小白球,则证明规划轨迹与机械臂运动轨迹一致,即检测结果合格。
4.4 应急处理环节
天玑骨科手术机器人价格昂贵、体积较大,多数医院无备用机。若术中突发故障则可能导致手术被迫中断或时间延长,会严重影响手术安全性和治疗效果。对于参数设置错误导致的故障,若处理得当则能在短时间内消除。因此,手术室针对这些故障制作了对应的应急处理流程图,罗列出可能的故障原因及处理方法,按照由易到难的检查顺序引导医护人员在短时间内判断、分析和排除故障,力图将突发故障对手术的不良影响降至最低。图5以天玑骨科手术机器人连接故障为例,列举了相应的紧急处理流程。
5 讨论
天玑骨科手术机器人作为一款国产高端医疗设备,提供了一种低术中辐射、高手术效率的骨科手术解决方案,但是其设计方面和使用管理环节的风险不容忽视。目前关于该设备的研究多侧重于手术方法和临床效果,而鲜有对其工作原理和临床使用风险进行研究。笔者通过应用FMEA 识别天玑骨科手术机器人的主要失效模式并对风险危害程度进行评估。司玮等[10]通过对国内手术机器人的标准研究及风险控制要点的数据进行可视化分析,发现手术机器人的主要风险为机械部件运动失控,与笔者研究结果相似。笔者在风险危害程度评估的基础上,应用鱼骨图法梳理出导致天玑骨科手术机器人风险的多种影响要素。基于这两种分析方法的结果,从而制定并实施了涵盖护理管理、消毒灭菌、质量控制和应急处理环节的管理措施,让使用和管理天玑骨科手术机器人的相关部门有章可循,保障了笔者所在医院2020年81 台天玑骨科手术机器人的安全性和有效性。
笔者研究不足之处在于FMEA 与鱼骨图法均为定性分析方法,而缺乏在定量分析方面的深入研究,难以量化各类风险的危害性及计算其失效发生概率,进而可能造成风险管理响应时间超前或滞后的问题。因此下一步研究将从严重度、发生率和检测度这三个方面收集天玑骨科手术机器人的临床使用数据,应用统计学方法计算各风险要素的权重和相关性,使制定的风险管理措施更加精准科学。
6 结论
笔者对天玑骨科手术机器人临床使用环节的风险进行了系统的评估和分析,从天玑骨科手术机器人各部件的潜在失效模式推导出最终的危害结果。梳理了各项风险影响因素,从而制定有针对性的风险管理措施,这些措施的有效实施需要院内使用和管理天玑骨科手术机器人的相关部门相互协作,不断优化改进相应的风险管理措施,保证天玑骨科手术机器人使用的安全性和有效性。笔者研究成果也可为同行业者对骨科手术机器人风险管理提供参考依据,具有一定的临床实践意义。