一种连续自动运输装置结构设计
2022-11-25韦磊,张鸿
韦 磊,张 鸿
(中国船舶集团有限公司第八研究院,江苏 扬州 225101)
0 引 言
自动扶梯是现代运输工具中的一种运载机械,主要应用于各大商场、站台等场合,能够实现行人在2个不同高度的水平面之间的相互运输。传统自动扶梯基本是直线型,只能满足点到点之间的直线运输,轨迹单一,梯路无法随地形和环境变化,因此只能适用于特定场合,严重限制了其使用范围。随着越来越多样化的建筑理念和建筑形式,直线型自动扶梯已满足不了酒店、大厦和高档旅游景区等特殊环境的需要[1]。
为了实现自动扶梯变坡度、变方向循环运行的目的,本文提出了一种新型连续自动运输装置[2]。该运输装置与传统扶梯相比,不仅含有水平直线段、倾斜段等常见梯路,还含有曲率半径变化的螺旋区段和水平弯曲段等,形式灵活多变,可以往复循环运行。本文设计的连续自动运输装置梯级能够沿曲率半径可变,在平行于梯级踏面内环形封闭的梯路上行走,梯路中可含有直线段、圆弧段和变曲率段等,能够根据空间环境进行配置[3]。该运输装置的主要优点在于突破了传统扶梯梯级只有一半用于实际运载的缺陷,利用率高;可以变坡度、变方向回环运行,适应性好。
1 连续自动运输装置机械结构

1—扶手装置;2—驱动装置;3—梯级装置;4—导轨装置图1 连续自动运输装置布置图
连续自动运输装置的布置图如图1所示,主要包括扶手装置、驱动装置、梯级装置和导轨装置。其中导轨装置环形封闭布置在变坡度、变方向的地形上,扶手装置固定在导轨装置上方,驱动装置设置在连续自动运输装置的出入口处。梯级装置布置在导轨装置内部,通过导轨装置导向、驱动装置驱动沿着导轨连续循环运动。
在设计该连续自动运输装置时,需要根据地形情况对梯路进行设计,根据结构参数绘出梯路俯视图(如图2所示),包括水平直线段、弯曲段和倾斜段,具体尺寸单位为mm,梯路倾斜段具体尺寸如图3所示。

1—水平直线段;2—弯曲段;3—倾斜段图2 梯路俯视图

图3 梯路倾斜段图
连续自动运输装置的基本参数包括倾斜段倾角α,梯级踏板的宽度z,额定运行速度v,理论输送能力C等。自动扶梯倾角为梯级踏板与水平面构成的角度,要求不超过30°,本文取α=20°。国内自动扶梯梯级踏板宽度通常有0.6 m、0.8 m、1.0 m 3种参数,本文取z=0.8 m。国标自动扶梯额定运行速度通常有0.50 m/s、0.65 m/s或0.75 m/s 3种参数,本文取v=0.5 m/s。理论运载能力C为每小时可以运载的乘客人数,它是假设所有梯级上都装满乘客,则有:
(1)
式中:k为承重因子,与踏板宽度z相关,当z=0.8 m时,k=1.5;额定运行速度v=0.5 m/s;y为梯级踏板的深度,国标规定大于0.38 m,本文取y=0.6 m;理论输送能力C=4 500人/h。
2 扶手装置和驱动装置设计
扶手装置示意图如图4所示,包括玻璃栏板、扶手带、驱动轮和张紧轮。其中扶手带设置在玻璃栏板上方,驱动轮通过电机驱动,从而带动扶手带沿着玻璃栏板上方的导轨导向循环运动,张紧轮侧向压紧扶手带提供张紧力,防止扶手带打滑影响扶手带与梯级装置的同步性。

1—玻璃栏板;2—扶手带;3—驱动轮;4—张紧轮图4 扶手装置示意图

1—张紧装置;2—驱动副轴;3—驱动链轮;4—高速链轮;5—减速器;6—制动器;7—电机;8—传动链;9—低速链轮;10—驱动主轴;11—扶手带驱动轮;12—驱动链图5 驱动装置示意图
驱动装置包括驱动链、驱动链轮、驱动副轴、驱动主轴、张紧装置、扶手带驱动轮、低速链轮、高速链轮、传动链、电机、减速器和制动器,如图5所示。驱动链轮驱动2条平行设置且构成闭环的驱动链运动,驱动链轮分别通过驱动副轴和驱动主轴连接,驱动副轴两端分别设有张紧装置。驱动主轴一端设有扶手带驱动轮,另一端设有低速链轮,低速链轮与高速链轮通过传动链传动,高速链轮通过电动机驱动、减速器减速以及制动器制动。
3 导轨装置设计
导轨装置包括斜撑、横梁、斜梁、竖梁、纵梁、外导轨、内导轨、水平脚轮导轨和护脚板轮导轨,如图6所示。导轨装置是连续自动运输装置的主要支撑主体和导向系统,用来支撑和安装其它零部件,包括梯级装置、扶手装置等,承受运输载荷;同时随地形而变化,为梯级装置的运动提供导向。上下平行布置的4根横梁和周期间隔排布的斜梁、竖梁、纵梁组成导轨装置的主要承载桁架结构,桁架两侧布置有斜撑,增加了结构的承载强度。桁架结构内部底面分别对称设有外导轨和内导轨,内部侧面分别对称设有水平脚轮导轨和护脚板轮导轨。外导轨和内导轨为梯级的外脚轮和内脚轮提供导向,并承载外脚轮和内脚轮传递的载荷,同时通过控制外导轨和内导轨的相对高度可以保证变坡度环境下梯级踏板能够保持水平。水平脚轮导轨通过给梯级侧轮提供导向限制梯级水平运动,防止其跑偏,护脚板轮导轨通过高度控制可以实现护角板始终处于踏板上方一定高度。

1—斜撑;2—横梁;3—斜梁;4—竖梁;5—纵梁;6—外导轨;7—内导轨;8—水平脚轮导轨;9—护脚板轮导轨图6 直线段导轨装置示意图
变坡度、变方向连续自动运输装置、导轨装置的轨迹应包括直线段、弯曲段、倾斜段,弯曲段导轨装置示意图如图7所示。将直线段内外导轨的高度加以调节即可变成倾斜段,内外导轨等高为水平路段,内导轨高于外导轨为倾斜向下段,外导轨高于内导轨为倾斜向上段。
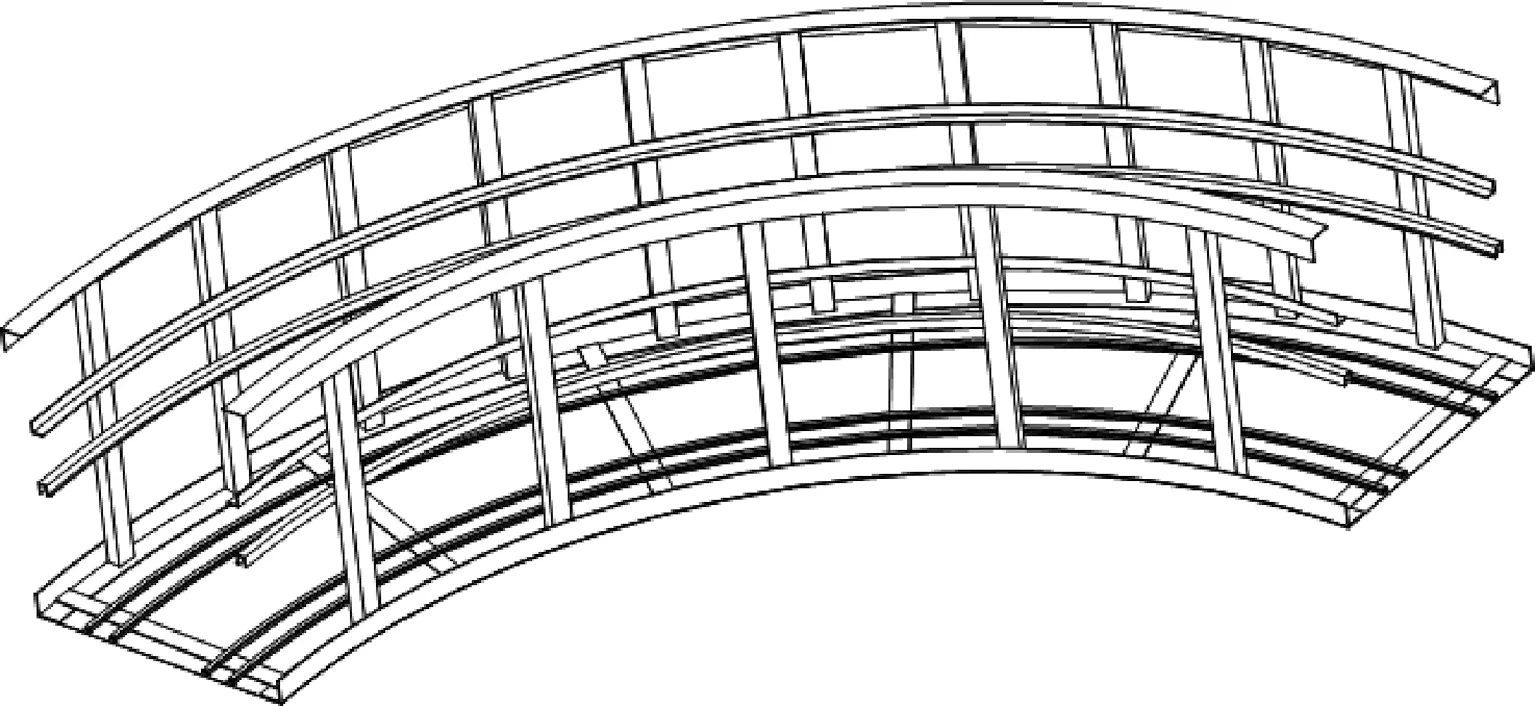
图7 弯曲段导轨装置示意图
4 梯级装置设计
梯级装置包括踏板、主立柱、旋转脚轮、托架、主轴套、辅助轴套、外脚轮、肋板、纵梁、T型梁、齿条、辅助横梁、内脚轮、辅助立柱、角钢、主横梁、主托板、中柱和辅助托板,如图8所示。踏板下方通过角钢前后平行固接有垂直于踏板面的2根主立柱和2根辅助立柱,主立柱和辅助立柱之间自上而下分别对称固接有2根主横梁、2根T型梁和2根辅助横梁,2根主立柱之间自上而下平行固接有托架和纵梁,2根主横梁之间及2根辅助横梁之间分别平行设有主托板和辅助托板,主托板和辅助托板之间设有中柱,托架外侧端部固接有主轴套,主轴套另一侧与辅助轴套固接,主轴套与纵梁之间固接有肋板。主立柱和辅助立柱外侧对称设有齿条,两侧的齿条用来添加驱动。2根T型梁的外侧对称设有旋转脚轮,用于平衡侧向力,保证整个梯级的安全性。2根主立柱和2根辅助立柱外侧分别对称设有外脚轮和内脚轮。梯级装置踏板的前端为圆状凸弧,后端为半径相同的圆状凹弧;中柱中心线与踏板垂直并通过踏板凸圆弧圆心,主轴套和辅助轴套形成的轴孔中心线与踏板垂直并通过踏板凹圆弧圆心;装配时,后踏板的凸弧装配在前踏板的凹弧中,后踏板的中柱装配在前踏板的主轴套和辅助轴套形成的轴孔中,实现梯级之间的旋转运动与上下运动。

1—踏板;2—主立柱;3—旋转脚轮;4—托架;5—主轴套;6—辅助轴套;7—外脚轮;8—肋板;9—纵梁;10—T型梁;11—齿条;12—辅助横梁;13—内脚轮;14—辅助立柱;15—角钢;16—主横梁;17—主托板;18—中柱;19—辅助托板图8 梯级装置示意图
梯级踏板承受乘客的重量,需要对其进行强度校核。梯级踏板材料选用6061铝,将三维模型导入ANSYS软件,设置材料参数,包括弹性模量,密度和泊松比,对踏板底部4个连接处施加完全约束,对踏板面施加均布面载荷0.1 MPa。通过静力学求解得到踏板的位移和应力分布云图,如图9所示。其中踏板最大位移为0.59 mm,最大应力为46.4 MPa,因此满足强度要求。
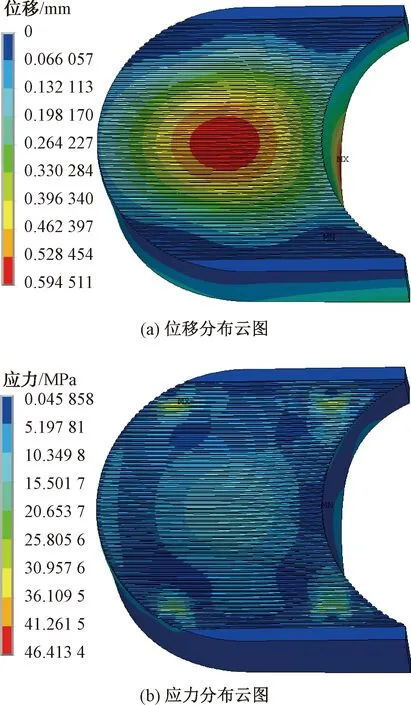
图9 梯级踏板仿真结果
图10为弯曲轨道梯级连接示意图,每2个梯级踏板之间的转动角度都是可变的,该梯级可以适应变坡度、变方向的环境,可根据地形特点进行铺设,适应性强。
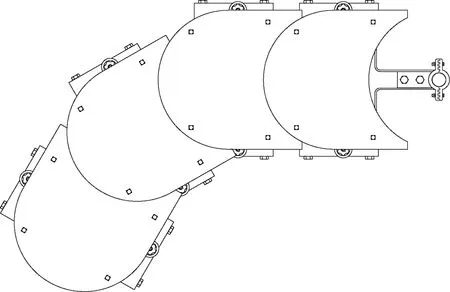
图10 弯曲轨道梯级连接示意图
图11为倾斜段梯级连接示意图,外导轨低于内导轨时对应倾斜上升段,外导轨高于内导轨时对应倾斜下降段,外导轨与内导轨平齐时对应水平段;通过调整内导轨和外导轨的相对高度保证梯级踏板在倾角变化的轨道中始终保持水平。

图11 倾斜段梯级连接示意图
5 结束语
(1) 设计了一种连续自动运输装置机械结构排布,可以实现变坡度、变方向的复杂地形条件下人员的可靠、高效运输,尤其适用于大型室内购物商场、展览馆、高档室外旅游景区等场合。
(2) 设计了具体的导向装置结构,通过控制内外导轨的高度,使踏板始终保持水平,可以根据地形特点进行铺设,适应性强。
(3) 设计了具体的梯级装置结构,实现梯级之间的上下与旋转运动,可以满足扶梯轨道变曲率的要求,提高了空间利用率,同时对踏板强度进行了校核。
