基于曲线描述子的手指静脉识别
2022-11-24王新强刘宇航陆瑶芃聂泽东
苏 丹 王新强 刘宇航 陆瑶芃 李 婷 聂泽东#*
1(桂林电子科技大学电子工程与自动化学院,桂林 541004)
2(中国科学院深圳先进技术研究院,广东深圳 518055)
引言
身份识别是指通过一定的手段,完成对用户身份的鉴别。传统的身份识别技术主要借助于钥匙、密码、证件等媒介来鉴别个人身份,但容易被复制、伪造、泄密或遗忘,因此生物识别技术应运而生。生物识别技术主要是通过计算机与生物传感器等高科技手段相结合,利用人体生理特征(如指纹、指静脉、掌纹、人脸、虹膜、视网膜等)或行为特征(语音等)来鉴别个人身份[1]。生物识别技术具有不被遗忘、不易被盗和复制、携带方便、防伪性能高等优点,与传统的身份识别技术相比更加安全、稳定和方便,已逐步发展为国内外热门研究方向。
常见的生物识别技术有指纹识别[2]、人脸识别[3]、掌纹识别[4]和虹膜识别[5]等,这些技术在给人们带来便利的同时也存在着一些缺点,例如:指纹和掌纹特征易被破坏,手指和手掌表皮有污渍或破损会降低识别率,而且指纹和掌纹存在被复制的可能性,安全性低;人脸识别易受到整容、化妆等因素影响,存在较大安全隐患;虹膜识别安全性高,但是它对硬件要求非常高,价格昂贵、便携性差,还易引发人眼不适。
手指静脉识别是一种新兴的生物识别技术,利用手指内部静脉血管的分布结构作为生物特征进行身份识别,与其他生物识别技术相比,具有以下优点:(1)唯一性和稳定性,每个人的手指静脉网络各不相同且终身不变[6],这为身份识别提供了可靠的依据;(2)高防伪性和不可复制性,手指静脉结构属于人体内部特征,只有在血液流动的情况下才能够被采集,故只能在活体上采集,无法被复制、伪造和窃取,安全性能高;(3)非接触式,手指静脉图像可以通过近红外光照射手指,用CCD 摄像头捕捉得到,具有非接触式的特点,安全便利;(4)手指静脉位于表皮之下,手指表皮有破损和污渍都不会对手指静脉的采集造成影响。基于上述优点,近年来手指静脉识别技术获得了越来越多的关注,成为研究与应用的热点[7]。
手指静脉识别一般分为4 个步骤,包括手指静脉图像采集、图像预处理、图像特征提取和匹配。最后的匹配结果依赖于特征提取,因此图像特征提取至关重要。根据提取的特征,手指静脉识别方法可以分为基于全局特征的方法、基于局部特征的方法和基于深度学习的方法。
基于全局特征的方法是运用降维,将高维图像映射到低维向量,减少特征中的冗余信息。主要方法有文献[8]提出的主成分分析法(principal component analysis,PCA)、文献[9]提出的独立成分分析法(independent component analysis,ICA)、文献[10]提出的线性判别分析法(linear discriminant analysis,LDA)、以及文献[11]提出的双向加权二维主成分分析法等。基于全局特征的方法在运算效率上得到了提高,但对光照强度不具有鲁棒性,对受光照影响严重的图像识别效果较差[8]。
基于深度学习的方法是通过搭建网络模型以对大量图片进行训练进而达到识别目的。文献[12]提出一种基于卷积神经网络的静脉纹路提取方法;文献[13]提出了一种基于生成对抗网络的静脉纹路分割方法;文献[14]采用基于AlexNet 的深度学习网络对指静脉图像进行识别。基于深度学习的方法识别率高,但需要用到大量的数据进行充分训练,运算速度慢,耗时较长。
基于局部特征的方法主要有:(1)基于纹理特征的算法。根据手指静脉呈线状分布,且静脉图像的横截面灰度曲线呈谷形分布的特点。文献[15]提出了重复线追踪法,通过从多个位置开始跟踪图像局部暗线来检测静脉纹路的走向;文献[16]提出了最大曲率法,利用静脉灰度值小于背景区域的特点,通过计算图像截面曲线的最大曲率点来提取静脉纹路;文献[17]提出了平均曲率法,通过计算每个像素点的平均曲率,然后将负平均曲率的像素点作为静脉纹路进行提取。(2)基于局部二值的算法。文献[18-21]分别提出了局部二值模式(local binary patterns, LBP )、 局部方向模式( local directional pattern, LDP)、 局部方向编码(local directional code,LDC)、局部线性二值模式(local line binary pattern,LLBP)对图像特征进行二值化,最后使用二值化编码进行图像识别。(3)基于静脉结构特征的算法。文献[22]对静脉图像进行Gabor 滤波和Frangi 滤波提取静脉线,然后对静脉线进行均匀采样并将采样点作为细节点,然后提取细节点的特征作为静脉特征,最后用CPD(coherent point drift)匹配算法进行特征匹配;文献[24]提取了静脉骨架化图像的细节点(端点和交叉点),然后利用修改的Hausdroff 距离来计算细节点间的相似度,进而达到图像识别的目的;文献[25]提取了静脉端点、交叉点和加速稳健特征(speed up robust features,SURF)点作为细节点,将它们的特征融合作为静脉图像的特征信息,最后分别用欧式距离和Hausdroff 距离对提取到的特征细节点进行匹配。
基于局部特征的方法,其特征模板相对较小,提高了存储效率和运行速度,近年来受到越来越多研究者的青睐。目前大部分基于静脉结构特征的算法仅考虑到了细节点,但是却忽略了静脉网络结构的曲线段,这会造成一部分结构信息的丢失,影响识别结果。并且,因为静脉图像的细节点较少,部分低质量的指静脉图像和分割算法的局限性会降低静脉细节点的有效性[26],从而降低识别率,所以只考虑静脉细节点特征是不够的。针对以上问题,本研究提出一种将静脉细节点(端点和交叉点)与静脉曲线段相结合的曲线描述子—交叉弧描述子,然后用交叉弧描述子提取静脉结构特征,最后利用加权距离公式进行静脉图像匹配。在自制的指静脉数据库上进行验证,得到较好的实验结果,证明了本文方法具有一定的应用前景。
1 材料和方法
1.1 图像采集
手指静脉图像的采集原理是:将波长为700 ~1 000 nm 的近红外光照射手指,指静脉中的血红蛋白会显著地吸收近红外光,而静脉周围人体组织和骨骼对近红外光几乎没有吸收作用,透过手指的近红外光将在红外摄像头内形成指静脉分布图像[26]。因此,手指静脉传感器主要由红外光发生装置和红外摄像头构成,如图1(a)所示。实验使用的手指静脉图像采集设备的结构是固定的,手指需放置在特定的位置才会触发图像采集,因此所采集的图像的分辨率和距离是保持不变的,如图1(b)所示,采集设备设置了固定的手指卡槽,手指必须放置在卡槽里才能触发图像采集。采集到的静脉图像如图1(c)所示。
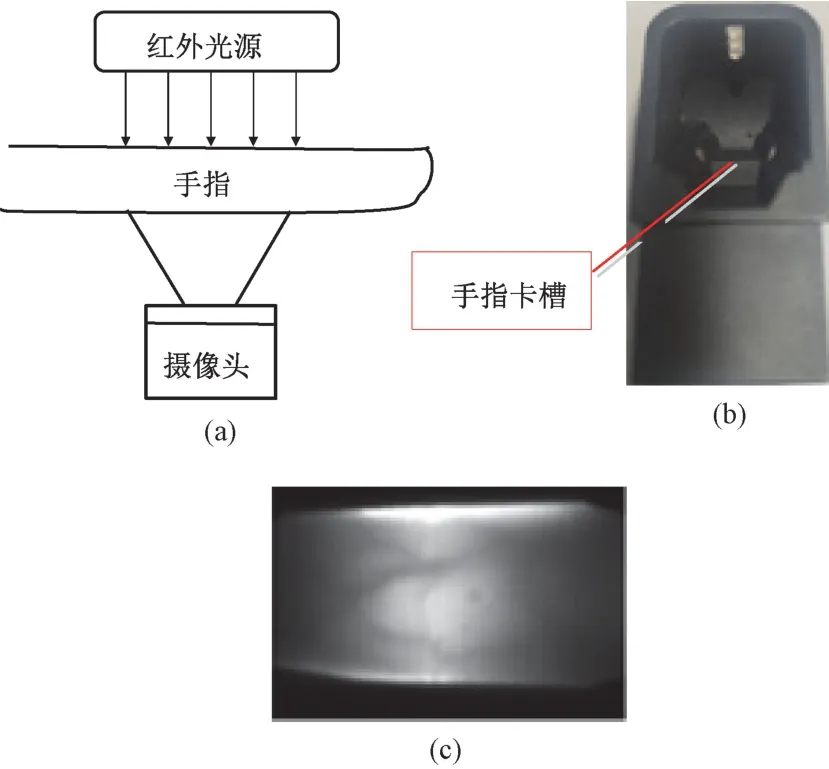
图1 手指静脉图像采集。(a)手指静脉传感器的基本结构;(b)手指静脉采集装置;(c)采集的手指静脉图像Fig.1 Finger vein image acquisition. (a) Basic structure of the finger vein sensor; (b) Finger vein collection device; ( c ) Finger vein image collected
对56 名志愿者进行手指静脉图像采集,建立了实验室自己的手指静脉数据库。对每个志愿者的一根手指进行15 次采集,一共采集到840 幅手指静脉图像。故数据库的样本量是840 幅,总计56 类图像,每类15 张手指静脉图像。
算法验证时,首先把数据库分为注册集和测试集,从每根手指的15 张静脉图像中随机选取一张共56 张作为注册集,余下的784 张作为测试集。
1.2 图像预处理
在手指静脉图像特征提取前要对图像进行预处理,手指静脉图像预处理包括:感兴趣区域(region of interest,ROI)提取、静脉纹路分割。
1.2.1 ROI 提取
手指静脉图像的ROI 指的是包含了丰富手指静脉网络信息及特征的手指区域。图像中包含指静脉信息特征少的区域对手指静脉识别起到的作用可以忽略不计,所以ROI 提取的目的是摒除图像背景中对指静脉识别无用的信息,保留有用的信息。
如图2 所示,首先利用Prewitt 算子检测手指静脉图像中的两条手指边缘线,分割手指区域;然后进行方向校正,对分割后的图像进行旋转[27];最后以静脉图像第二指关节为参考线截取感兴趣区域的左右边界,再以手指上下边缘中线为水平参考线截取上下边界,由此可得到矩形ROI[27]。
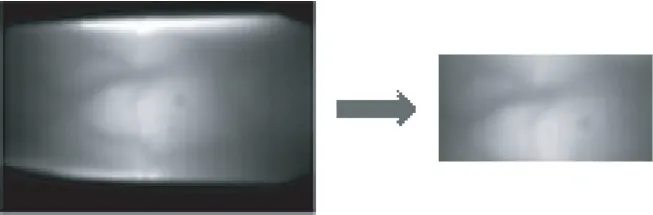
图2 ROI 提取示意Fig.2 ROI extraction schematic diagram
1.2.2 手指静脉纹路分割
静脉纹路分割,即对手指静脉ROI 图像,通过主曲率二值化、细化等处理后得到手指静脉骨架图,如图3 所示。

图3 指静脉纹路分割示意。(a)指静脉ROI 图;(b)指静脉二值图;(c)指静脉细化图Fig.3 Segmentation of finger veins.(a)ROI of the finger veins; (b)Binarization of finger veins; (c)Thinning of finger veins
1.2.2.1 手指静脉纹路二值化
采用主曲率二值化法[28]对手指静脉图像进行二值化,该方法包括梯度归一化、主曲率计算和二值化这3 个步骤:(1)将指静脉图像上每个像素的梯度归一化为1;(2)根据每个像素点的Hessian 矩阵的特征值计算主曲率。在计算主曲率之前,使用高斯滤波器对归一化的梯度场进行平滑处理。在每个像素点上有两个主曲率,但这里只使用较大的曲率,它对应于所有方向上的最大曲率;(3)使用大津阈值分割法对最大曲率值进行阈值化,得到手指静脉二值图像。
1.2.2.2 手指静脉纹路细化
对手指静脉二值图像使用细化算法,可以得到单像素宽的静脉骨架图,作为之后特征提取的基础。细化过程中,为了保持静脉纹路的连续性,需要保留静脉的拓扑结构,不断重复删除图像边缘满足一定条件的像素,最终得到单像素宽的静脉骨架。
1.3 本研究算法
1.3.1 提取交叉点和端点
手指静脉网络是由多条静脉曲线互相连接在一起,再被交叉点分割为若干条曲线段的。所以交叉点和端点都是静脉图像重要的细节点。可以通过检测手指静脉骨架上任意一点的八邻域像素值来提取手指静脉图像的交叉点和端点。点P是手指静脉骨架上任意一个像素点,它的八邻域示意如图4 所示,可以通过计算点P的八邻域中像素值为1 的点的个数M(即点P八邻域所有点的像素值之和)来判断P点是否是交叉点或端点,如式(1)所示。

1)当M(P) = 1 时,则P是指静脉曲线上的一个端点;
2)当M(P) = 2 时,则P是指静脉曲线上的一个普通点;
3)当M(P) ≥3 时,则P是指静脉曲线上的一个交叉点。
指静脉图4 交叉点和端点的检测结果如图5所示。
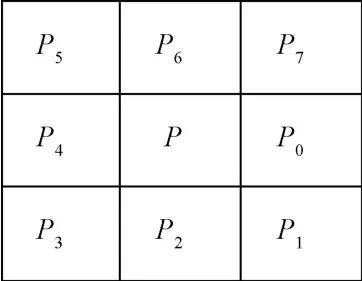
图4 像素点P 的八邻域示意Fig.4 Eight neighborhoods of pixel point P
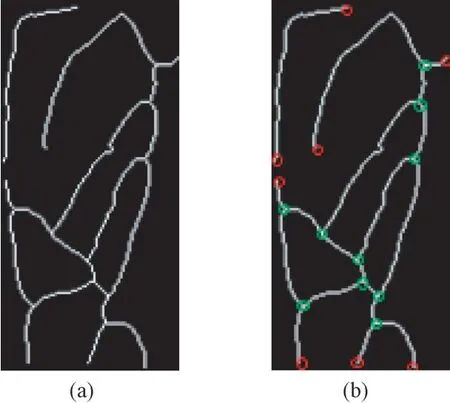
图5 交叉点和端点检测示意。(a)手指静脉骨架图;(b)手指静脉交叉点和端点检测结果(中红色圆圈表示端点,绿色圆圈表示交叉点)Fig.5 Schematic diagram of intersection points and endpoints detection. (a) Skeleton of finger veins; (b) Detection result of intersection points and endpoints (Red circles indicate endpoints and green circles indicate intersection points)
1.3.2 弧描述子
手指静脉图像中除了端点和交叉点,还包含许多以端点和交叉点为两端的静脉曲线段,这些曲线段同样包含了丰富的手指静脉信息,属于指静脉的重要特征。所以,为能够获得手指静脉的完整结构特征,不仅要提取静脉的端点和交叉点,还要对静脉的曲线段进行描述,提取静脉曲线段的特征[29]。为了精确地描述静脉曲线,本研究提出一种基于弧的曲线描述子——称为弧描述子。
如图6 所示,对曲线段Lo(A,B),采用弧描述子进行描述,具体描述方法如下:
图6 曲线弧描述子Fig.6 Curve arc descriptor
1)计算曲线段的弧长,即总长度S;
2)连接曲线段的起点A 和终点B,得到曲线段的弦长L;
3)找到曲线段上距离弦长L最远的点C,过该点作垂直于L的直线,并与L相交于点D。则直线CD 的长度可作为曲线段的弧高H[30];
4)注意特殊情况,当曲线段是一条直线时,H=0,S=L;
5)最后获得曲线段的弧描述子为

如果两条曲线段相似,则它们的弧描述子也相似;如果两条曲线段不相似,则它们的弧描述子差异度非常大。基于弧描述子,可以计算出两条曲线段的差异度,即两条曲线段的距离。
给定曲线段Zi的弧描述子Di={Si,Li,Hi}和Gj的弧描述子Dj={Sj,Lj,Hj},定义曲线段距离度量函数为[30]:

1.3.3 交叉弧描述子
在指静脉的结构特征中,相比于端点,交叉点包含更丰富的信息。为了降低计算复杂度,本文提出了基于交叉点的弧描述子,简称交叉弧描述子。交叉弧描述子的定义如下:从任意一个交叉点出发,追踪与其相连的静脉曲线,直到遇到端点或另一个交叉点时结束,最后能得到4 条或4 条以上静脉曲线段[29]。
因为大部分静脉图像交叉点连接的静脉曲线段最多是4 条,4 条以上出现的概率特别小,所以以4 条静脉曲线为例,假定P是指静脉骨架图像中的一个交叉点,其八邻域如图4 所示,从P6开始,按照顺时针方向对点P的八邻域像素点P6,P7,P0,...,P5进行判断其像素值是否为1(等于1 的点为静脉上的点),直至找到4 个像素值为1 的静脉点M1~M4。把M1~M4分别作为对应曲线段的起点,如图7(b)、(c)、(d)、(e)所示。

图7 曲线段追踪(绿色标记“+”代表起点,红色标记“O”代表交叉点)Fig.7 Curve segment tracing (The green “+” represents the start point, the red “O” represents the cross point)
假设Jn(n=1,2,3,4)表示与交叉点P相连的一条静脉曲线段的点坐标序列,tn是追踪曲线时以Mn作为起点的移动点。具体的追踪步骤及Jn生成过程总结如下[31]:
1)令移动点tn的坐标等于起点Mn的坐标,即tn(x0,y0)=Mn(x,y),把tn(x0,y0)放进Jn序列,则有Jn(x0,y0)=tn(x0,y0),并将交叉点P和另外3 条曲线段起点的像素值置零;
2)以移动点tn为中心,遍历其八邻域,找到像素值为1 的点,该点坐标(xi,yi)即为下一个静脉点的坐标,将tn移动到该点上,即tn(x,y)= (xi,yi),并将此时tn的坐标(xi,yi)放入Jn序列;
3)把移动点tn(xi,yi)的像素值置零,令i=i+1;
4)判断tn是否为端点或交叉点。若不是,则重复步骤(2)和(3),直到tn为端点或交叉点为止。
上述过程即为静脉曲线段追踪的完整步骤,由此可获得与交叉点相连的4 条曲线段的坐标序列J1~J4,最后由曲线段坐标序列和1.3.2 节的方法计算得到这4 条曲线段的弧描述子l1~l4,最终获得的交叉弧描述子表达式为

式中,(x,y)是交叉点坐标,l1,l2,l3,l4分别表示的是与该交叉点相连的4 条静脉曲线段的弧描述子。由1.3.2 节方法得l1={S1,L1,H1},l2={S2,L2,H2},l3={S3,L3,H3},l4={S4,L4,H4},所以式(4)又可以表示为

当交叉点连接3 条静脉曲线段时,可以当做是连接4 条静脉曲线段的一种特殊情况,即第4 条曲线段的S、H、L都为0,弧描述子l4={0,0,0}。
交叉点连接的静脉曲线段超过4 条的概率非常低,一旦出现交叉点连接的静脉曲线段超过4 条,将自动选取主要的4 条静脉曲线段进行描述。
1.3.4 静脉图像特征提取
以交叉点和端点为核心,跟踪与交叉点相连的曲线段,将交叉点、端点和曲线段共同看作指静脉图像的结构特征并进行提取。
遍历一幅手指静脉图像上所有的交叉点,假设交叉点个数为m,用交叉弧描述子对每一个交叉点进行描述,可得到包含m个交叉弧描述子的手指静脉图像特征矩阵,如式(6)所示,矩阵中每一行都代表一个交叉弧描述子。
式中,m是手指静脉图上的交叉点个数,(xm,ym)是第m个交叉点的坐标,lm1、lm2、lm3、lm4分别是与第m个交叉点相连接的静脉曲线段的弧描述子,lm1={Sm1,Lm1,Hm1}、lm2={Sm2,Lm2,Hm2}、lm3={Sm3,Lm3,Hm3}、lm4={Sm4,Lm4,Hm4}。所以式(6)又可以用式(7)表示。
1.3.5 交叉弧描述子的距离度量函数
如果两个交叉弧相似,则它们的交叉弧描述子也相似;而如果两个交叉弧不相似,则它们的交叉弧描述子差异度非常大。要想判断两个交叉弧之间的相似性,需要计算这两个交叉弧描述子之间的距离,距离越小,相似性越大。两个交叉弧描述子之间的距离和两交叉点之间的距离有关,还和与交叉点相连的曲线段组合间的相似性有关。两个交叉点的距离就是两个交叉点坐标之间的欧式距离,给定两个交叉点的坐标分别为(x1,y1)、(x2,y2),则它们的距离式如式(8)所示。Dbif表示两个交叉点间的距离。

给定一幅静脉图像上的交叉弧Ki的描述子Bi={(xi,yi),li1,li2,li3,li4}和交叉弧Kj的描述子Bj={(xj,yj),lj1,lj2,lj3,lj4},定义两个交叉弧距离度量函数为

式中,D(li1,lj1)、D(li2,lj2)、D(li3,lj3)、D(li4,lj4)分别是弧描述子li1和lj1、li2和lj2、li3和lj3、li4和lj4的距离,可由式(3)计算得出;q代表权重值,其大小由交叉点间的距离决定,交叉点间距离越大权重越大、距离越小权重越小。这里q是一个经验值,可通过反复实验获得最佳值,对权重q的取值如下:
1)当交叉点距离Dbif≤1 时,q=0.2;
2)当交叉点距离1<Dbif≤3 时,q=0.5;
3)当交叉点距离3<Dbif≤5 时,q=0.7;
4)当交叉点距离5<Dbif≤8 时,q=1;
5)当交叉点距离8<Dbif时,q=100。
1.3.6 交叉弧匹配

设定一个阈值th,当两个交叉弧之间的距离小于阈值th 时,则这两个交叉弧能够匹配成功。对待匹配的两张手指静脉图像,先分别计算得到两个指静脉图像的特征矩阵,然后对两个特征矩阵中的交叉弧描述子进行一一匹配,即按式(9)计算交叉弧距离,当距离小于阈值th 时,说明对应的两个交叉弧能够匹配成功;当距离大于阈值th 时,说明匹配不成功。th 是一个经验值,经多次实验发现,当th=40 时得到的识别效果最好。当两幅手指静脉图像属于同一类时,匹配成功的交叉弧对多;不属于同一类时,匹配成功的交叉弧对少。
1.3.7 图像匹配
采用的图像匹配方法是:把指静脉图像数据库分为注册集和测试集,将注册集里的每一张图片和测试集里的每一张图片进行一一匹配,得到不同的匹配交叉弧对N,并将N归一化到[0,1]范围内,设定阈值thr,当N>thr 时,判定两张图片匹配成功;当N<thr 时,判定两张图片匹配失败。阈值thr 的取值范围是[0,1],受试者工作特性曲线中等错误率所对应的阈值是最优阈值。
1.3.8 算法流程图
研究流程如图8 所示,首先把手指静脉图像数据库分为注册集和测试集,分别对注册集和测试集图像进行预处理,预处理包括ROI 提取、静脉分割;然后采用交叉弧描述子对静脉骨架图进行交叉弧描述,从而提取出静脉图像结构特征矩阵;最后用加权距离公式进行图像匹配。
图8 本研究方法流程Fig.8 Flow chart of method
1.4 其他算法
SURF 算法、LBP 算法和局部三值模式(local ternary patterns,LTP)算法都是经典的图像特征提取算法,且和本算法一样都可以采用欧式距离进行图像匹配,故选取这3 种算法与本算法进行对比。
1.4.1 SURF 算法
SURF 是一种具有加速鲁棒性的局部特征点描述算法,它是SIFT 算法的改进,解决了SIFT 算法计算复杂度高、耗时长的缺点。
SURF 描述子生成的过程:构建Hessian 矩阵,构造高斯金字塔尺度空间,并利用非极大值抑制初步确定的特征点,精确定位极值点,然后通过计算特征点的一定领域内的水平Haar 小波特征和垂直Haar 小波特征来确定64 维特征向量[25]。最后采用欧式距离式进行特征点匹配,进而实现图像匹配。
1.4.2 LBP 算法
LBP 是一种用来描述图像局部纹理特征的算子,设3×3 的窗口的中心像素灰度值为Pa,以Pa为阈值,将其与相邻的8 个像素的灰度值进行比较,若周围像素灰度值大于或等于中心像素,则该像素点的位置被标记为1,否则为0。并将LBP 算子局部邻域关系记为S(x,pa)[18]:

窗口中心像素点的LBP 值表示为

式中,Pa代表中心像素点的灰度值,i代表第i个邻域,x代表该邻域的灰度值。
图9 为LBP 算子示意。对静脉图像每个像素点进行LBP 编码,得到LBP 图谱,然后将LBP 图谱的归一化统计直方图作为图像的特征向量,最后采用欧式距离进行图像匹配。
图9 LBP 算子Fig.9 LBP operator
1.4.3 LTP 算法
LTP 是一种图像局部纹理描述符,设3×3 的窗口的中心像素灰度值为pa,设定一个阈值t,若邻域像素灰度值x≥pa+t,则该像素点的位置被标记为1,并将LTP 算子局部邻域关系记为S(x,pa,t)[32]。
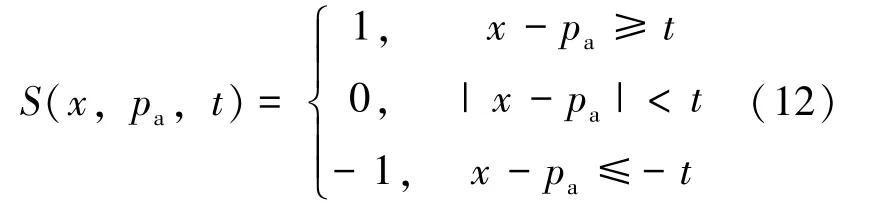
窗口中心像素点的LTP 值表示为

式中,pa代表中心像素点的灰度值,i代表第i个邻域,x代表该邻域的灰度值。
图10 给出了阈值t=5 时LTP 算子的示意。根据式(13),LTP 的编码有3i种模式[32],此时编码的复杂度大幅提升且灰度值超限。故为了简便,现将LTP 分为如图11 所示的正负LBP 通道[32]。

图10 LTP 算子Fig.10 LTP operator
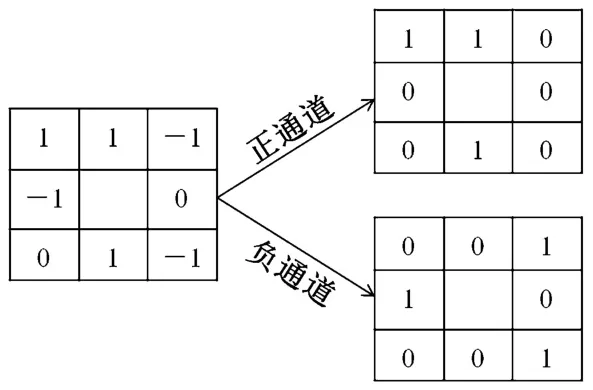
图11 LTP 的正负通道Fig.11 Positive and negative channels of LTP
对静脉图像每个像素点进行LTP 编码,得到LTP 图谱,然后将LTP 图谱的归一化统计直方图作为图像的特征向量,最后采用欧式距离进行图像匹配。
1.5 性能评价指标
1.5.1 误拒率和误识率
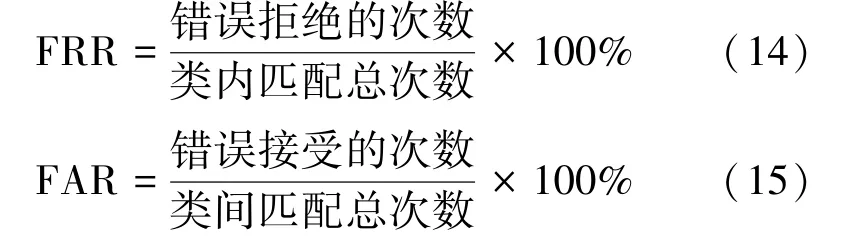
误拒率(false reject rate,FRR)是指同一类图像被误认为是不同类图像,从而被错误拒绝的比率,其计算方式如式(14)所示。误识率(false accept rate,FAR)是指不同类图像被误认为是同类图像,从而被错误接受的比率,其计算方式如式(15)所示。
1.5.2 受试者工作特性曲线和等错误率
受试者工作特性曲线(receiver operating characteristic,ROC)是生物识别领域中用来评价一个系统整体性能的指标。以FAR 为横坐标,FRR 为纵坐标即可得到ROC 曲线图[33-36],且ROC 曲线与直线Y=X的交点所对应的坐标值即为等错误率(equal error rate,EER)的大小,EER 是FAR =FRR的值。ROC 曲线和等错误率都是用于评价生物识别算法性能的指标,ROC 曲线越靠近左下角,等错误率越小,代表算法性能越好。
2 结果
本方法涉及到两个阈值参数th 和thr。th 是两个交叉弧是否能判定为同一个交叉弧的阈值,可经过反复调参得出其最优值,如表1 所示,当th =40时,得到的等错误率最低,识别效果最好。参数thr的取值范围是[0,1],令thr 在[0,1]之间每隔0.05取一个阈值,求出每个阈值对应的FAR 和FRR,最后以FRR 为横坐标,FAR 为纵坐标绘制成ROC 曲线;ROC 曲线图中FAR =FRR(即等错误率时)所对应阈值即为thr 的最优值。
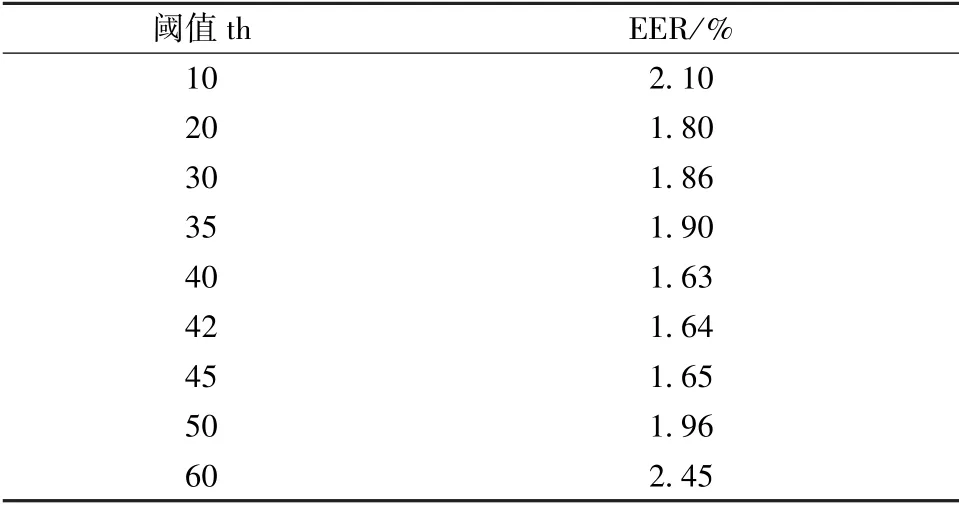
表1 不同的th 取值对应的EERTab.1 EER corresponding to different th values
令th =40,得到本方法的ROC 曲线,如图12 所示,并可以得到等错误率是1.63%。

图12 本方法的ROC 曲线Fig.12 ROC curve of the method in this paper
为了验证本方法的可靠性,分别采用LTP[38]、LBP[39]和SURF[25]算法对实验时自制的手指静脉图像数据库进行实验,首先进行特征提取,最后根据欧式距离进行图像匹配。最后实验结果如图13和表2 所示。图13 是不同指静脉识别算法的ROC 曲线。表2 是不同指静脉识别算法的EER值对比。
由表2 和图13 可以看出,所提出的基于曲线描述子的手指静脉识别算法的等错误率为1.63%,而LTP、LBP、SURF 算法的等错误率分别为3.99%、4.47%、6.08%。本算法的等错误率明显远低于其他几种算法,即本算法的识别效果更好。
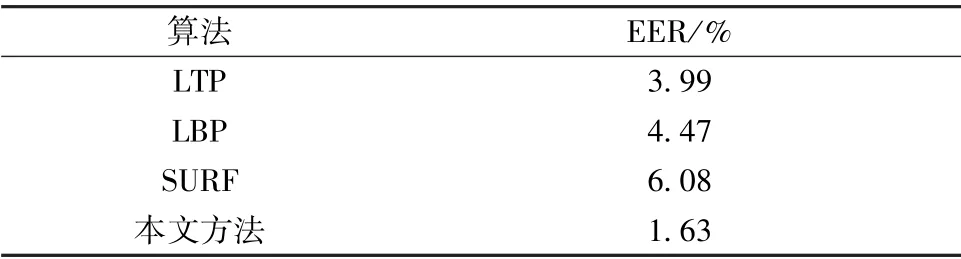
表2 不同指静脉识别方法的EER 对比Tab.2 Comparison of EER for different finger vein recognition methods
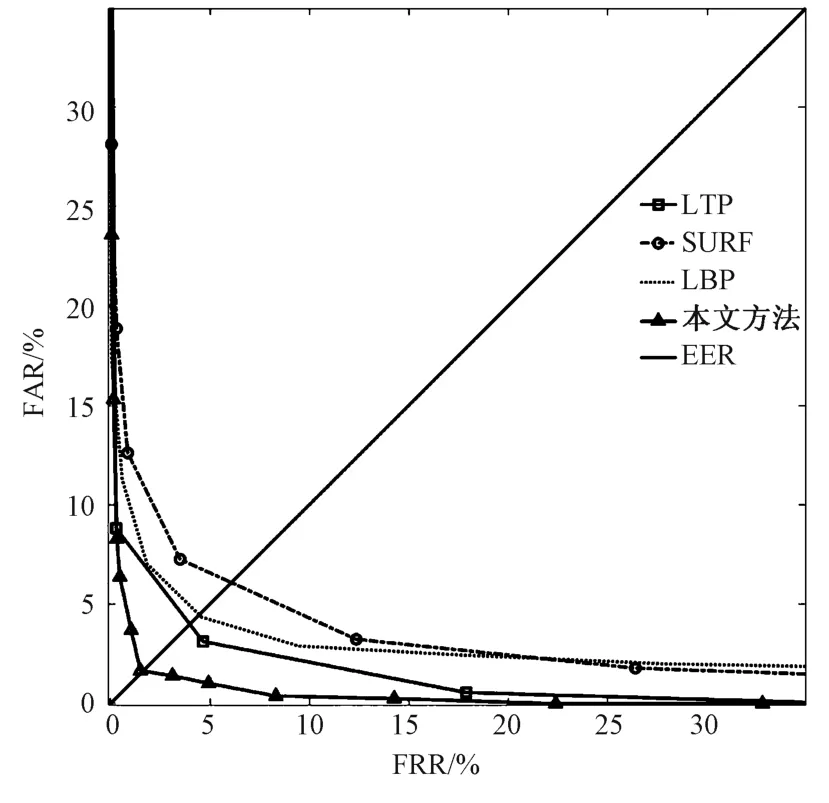
图13 不同指静脉识别方法的ROC 对比Fig.13 Comparison of ROC for different finger vein recognition methods
3 讨论
结构特征是手指静脉最稳固的特征[29],结构特征提取的精确性越高,静脉识别效果越好。手指静脉的结构特征在于,静脉是呈线状分布的,多条静脉交织在一起构成了静脉网络,而静脉网络可以由交叉点分割为数条曲线段[29]。本课题主要围绕手指静脉图像特征提取,研究如何精确地提取手指静脉结构特征,提高识别率。
在基于静脉结构特征的方法中,基于交叉点和端点的特征提取由于比较简单而成为目前常用的方法[31]。虽然静脉交叉点和端点也能较好的表示静脉网络结构特征,但是识别准确性通常不令人满意。第一,手指采集姿势不同等原因引起的图像旋转和平移,会造成即使是同源的手指静脉,相同的交叉点或端点的位置坐标也有可能出现不同,从而降低静脉交叉点和端点特征的有效性。第二,静脉曲线复杂,即使是不同源的手指静脉,交叉点或端点之间的距离也有可能出现相同的情况[37],容易出现误识现象;第三,只考虑交叉点和端点等特征点,会损失静脉网络结构的曲线特征。所以,单纯的交叉点和端点特征信息无法有效的表达完整的静脉结构特征。静脉结构特征除了交叉点和端点外,还有许多与交叉点相连的静脉曲线段,两者的融合特征能更精确的表达完整的静脉结构特征。
为了更精确的提取手指静脉的结构特征,本算法跟踪与交叉点相连的静脉曲线段,将静脉交叉点的位置信息和其周围静脉曲线段的形状特征相结合,提出了适用于手指静脉图像识别的曲线描述子,即交叉弧描述子。交叉弧描述子不仅包含了交叉点在图像中的坐标信息,还包含了与交叉点相连的若干条曲线段的形状特征(弧长、弦长、弧高)信息,能够有效表示完整的静脉网络结构,更精确地提取手指静脉结构特征。即使手指静脉图像出现旋转或者平移,静脉曲线段的形状特征是不会发生改变的,所以理论上来说,所提出方法对旋转的图像具有一定的鲁棒性。而且由表2 可知,本算法的等错误率是1.63%,分别比LTP、LBP、SURF 算法降低了2.36%、2.84%、4.45%,说明本文算法相比于其他三种算法,能更精确描述手指静脉图像的特征,大幅降低等错误率,具有更好的识别效果。
然而,本研究仍然存在着一些不足之处。首先,本研究是基于采集图像的分辨率和采集距离大小不变的情况下进行的,在下一步工作中,我们将重点研究图像分辨率和距离的变化对弧描述子的影响;其次,本算法较依赖于预处理结果,缺乏对图像旋转不变性的研究,所以在下一步工作中,我们将会招募更多的志愿者进行手指静脉图像采集以增大实验数据量,在扩大数据集的基础上进一步完善算法,深入研究图像旋转对识别结果的影响,进一步提高算法对图像的旋转不变性。
4 结论
本研究针对手指静脉的结构特征提出了一种基于曲线描述子的静脉识别算法,将静脉曲线交叉点、端点和曲线段相结合,提出了用于静脉曲线描述的交叉弧描述子,用它对分割并细化后的静脉图像进行特征提取,最后使用加权距离式计算匹配交叉弧对并进行图像识别。实验结果表明,所提出的手指静脉识别算法,与LTP、LBP、SURF 这3 种传统算法相比,能更有效降低识别的等错误率,为手指静脉识别技术研究提供了参考。
