正交并联式六维力传感器设计与标定方法
2022-11-21肖小平
杨 超,肖小平,田 云
(1.湖南省湘西土家族苗族自治州质量检验及计量检定中心,湖南 湘西 416000;2.湖南省计量检测研究院,长沙 410014)
近年来,随着智能制造、物联网等技术的快速发展,六维力传感器对于机器人和智能装配领域非常重要[1],由于其具有出色的非线性度、高精度和高承受过载能力,可同时测量3个方向的力和力矩,被广泛应用于航天航空、汽车测试、生物力学和机器人等众多科技领域,在工信部2021年发布的“十四五”机器人智能制造产业规划中,将六维传感器纳入到重点发展的核心零部件,满足机器人智能化发展需求[2]。但由于六维力传感器非线性力学特性十分明显,需要考虑多通道信号的蠕变、交叉干扰及数据传输的实时性,再加之六维力传感器联合加载标定的复杂性,使得六维力传感器设计和标定难度极大。因此,本文研究六维力传感器的设计与标定,对于提升我国智能装备水平,加速科技强国的建设具有重要意义。
1 六维力传感器的特点及应用
1.1 六维力传感器的特点
根据力的测量维度进行划分,力觉传感器可以分为一至六维力传感器。在指定的在笛卡尔坐标系中,传感器如果能同时测量沿x、y、z3个坐标轴方向的力和绕3个坐标轴方向的力矩,这类力觉传感器称为六维力传感器[3]。六维力传感器是维度最高的力觉传感器,能给出最为全面的力觉信息,具有灵敏度高、维间耦合小及有机械过载保护功能等特点[4],可感知并度量力和力矩,测得传感器自身体系差错、负载重力效果、负载所受外部接触力等数据,将力的六维分量转换为电信号,用于测量力的方向和大小,便于不断调整力和力矩,并丈量加速度或惯性力,确保测量精度达到微米级。
1.2 六维力传感器的应用
六维力测量的需求最早来自航空航天飞行器研究领域,安装在飞行器内部的六维力传感器用来测量飞行器的空气动力学特性,包括飞行器的升力、阻力、侧向力、俯仰力矩、偏航力矩和滚转力矩[5]。正交3个方向力和3个方向力矩同时测量,所以需要用六维力传感器。最早的六维力测量并不是采用传感器,而是采用原理和制造都非常复杂的大型机械装置,随着敏感元器件技术的发展,六维力传感器也应运而生,后来逐渐应用到汽车测试、生物力学和机器人等众多科技领域[6-7]。六维力传感器的动态性能在实际应用中非常重要,根据应用场景的环境、载荷、安装、通信、算力和动力学特性等需求不同,六维力传感器的产品形态和技术特点也有较大区别,如当机器人在三维空间作业过程中,通过六维力传感器就有了感知能力,根据末端的感应系统包括三维力及三维力矩,根据信号分析处理,采集检测力学信息,不断调整机器人作业状态,从而得到较好的运动控制效果。六维力和力矩传感器为机器人的力控制和运动控制提供了力感信息,对实现机器人智能化起着重要作用[4]。
2 正交并联式六维力传感器工作原理及数学模型
2.1 正交并联式六维力传感器工作原理
六维力传感器空间坐标定义如图1所示。正交并联六维力传感器结构示意图如图2所示。正交并联六维力传感器由基座、测力平台、六支测力支架3部分组成,六支测力支架共分为2组,分别布置在基座与测力平台之间的水平和竖直位置,3个竖直测力分支两侧通过弹性球铰分别与基座和测力平台相连接,3个水平测力分支两侧通过弹性球铰分别与连接基座和测力平台的支撑立柱相连接,通过正交六支测力分支组成空间并联结构,在笛卡尔坐标系中可同时测量力和力矩,并根据3个分量转换成为电信号。
由于测力结构在空间呈现出水平和竖直正交分布,当六维传感器受到x、y方向的力和z方向的力矩时,传感器测量的是水平方向的测力,由3个水平测力分支来测量;当受到z方向的力和x、y方向的力矩时,传感器测量的是竖直方向的测力,由3个竖直测力分支来测量。这种测力分支的结构布置形式,通过六维力传感器的内部算法,会解耦各个方向力和力矩间的干扰,计算出六维传感器的受力和力矩,使得六维力传感器的测量更为精准,确保传感器高精度测量力。所以高精准度的六维力传感器,可以确保在六维度联合承载的情况下,测量值偏差在量程的0.3%FS以内。
2.2 正交并联式六维力传感器数学模型
正交并联六维力传感器由上下2个平台和6个测量分支构成,以测力平台的中心为基点,设置1个基准坐标系o-xyz,x轴布置在测力平台水平位置,在三维空间与B1b1和B4b4测力分支相垂直;y轴也布置在测力平台水平位置,在三维空间与B2b2和B5b5测力分支相垂直;z轴垂直于测力平台和基底平面。测力平台和基座的设计基本相同,由3个立柱分别与平台和基座相连接,测力平台与基座之间的距离为L,各测力分支与基座之间的连接点设为B,与测力平台的连接点设为b。b1b2b3组成上平台为测力平台,B1B2B3组成下平台为基座。b1B1、b2B2、b3B3属于3个竖直设计的测力分支,b1b2b33个点与测力平台中心相连接,相互呈现出120°夹角。b4B4、b5B5、b6B6属于3个水平设计的测力分支,3个水平测力分支与测力平台和基座之间的中心圆o相切,3个相切点与中心圆点之间同样呈现出120°夹角。
根据上述工作原理分析,六分支正交并联六维力传感器的静力学平衡方程为
式中:F表示作用在六维传感器上的外力;f表示测量过程各分支所受的轴向力;G表示六维传感器的矩阵系数,由各球铰接点与各类坐标相对应共同组成6×6的矩阵。其中静力影响系数矩阵如下
参考贺静、王志军等[8-9]的研究,可看出G6各个力的分支可由不同分支来确定,各维度之间的向量也不相关。因为鉴于六维力传感器的特殊布置结构,六维力传感器比其他传感器力解耦能力优势明显。
3 正交并联六维力传感器的静态标定
六维力传感器的标定通常选择静态标定法,使传感器在稳定作业的状况下,当受到静载荷或缓慢变化载荷作用时,通过实验得出测力分支输出的电压信号,与实际输入载荷之间的关系数据,通过实验结果剔除干扰因素的影响,对测量的精度进行修正,以减少测量过程产生的误差。所以,科学准确地开展静态标定工作,是提高六维力传感器精准度的有效方法,具有实际意义和应用价值。
3.1 六维力传感器的标定算法
对于六维力传感器而言,标定需要考虑6个维度力的变化,当传感器受到6个维度力的作用时,其中6个测力的分支输出电压就会发出改变。传感器力的标定是通过加载空间外力和外力矩理论值的载荷,同时记录传感器各分支输出的对应的原始电压信号,获得六维力传感器内部算法的各个参数,建立传感器原始信号和受力之间的映射关系,称为传感器的标定矩阵。标定矩阵精度越高,该传感器测量精度也越准确。加载的标定力/力矩和6个分支输出的电压,用数学公式表达映射关系为
式中:Fs为空间六维标定的力;U为测量6个分支的输出信号;GC为传感器原始标定力和输出信号之间的映射矩阵。
本研究设定六维力传感器处在适合的线性体系之内,通过对传感器施加六个线性无关的六维标定,通过测量6个分支测量力的输出电压,得到最终的标定矩阵。但通常情况下,传感器的输入与输出并不是存在真实的线性关系,需要通过最小二乘拟合修正传感器的加载数据,进而得到相对精准的标定矩阵。由于传感器加工精度的不同和电器元件原件的自身误差,在没有经过标定之前的传感器,存在一定的误差。因此,为进一步增加传感器的使用测量精度,需要对六维力传感器进行标定。
3.2 六维力传感器的静态加载方法
本次选择在线标定方法进行传感器的加载,硬件系统包括采集器、砝码、六维力测试平台,软件系统采用LabVIEW标定软件,先现将传感器安装在正确的位置,把六维力传感器各个方向的测量分为若干个加载点,然后对加载的三维空间安装负载,根据相应的加载次序逐步加载,再对各方向力和力矩进行标定。对传感器x、y、z轴进行联合标定时,标定加载空间变为三维空间,在六维力传感器标定过程中,采用3个方面的力和3个方面的力矩同时加载,静态标定算法交叉样本,使得传感器受力情况模拟得非常真实,便于考察传感器在多维载荷同时作用下的非线性力学特性,大幅度优化解耦算法的数学模型。如六维力传感器每组检验载荷都必须是Fx、Fy、Fz、Mx、My及Mz的随机组合,对于相同状态下采取等间隔力加载的方式,直到该方向内满量程,这样获得的精度和准度,可以清晰评价传感器各测量方向在量程范围内的测量误差水平。通过标定后,传感器的准度更好、串扰更低。标定后六维力传感器测量精度见表1。
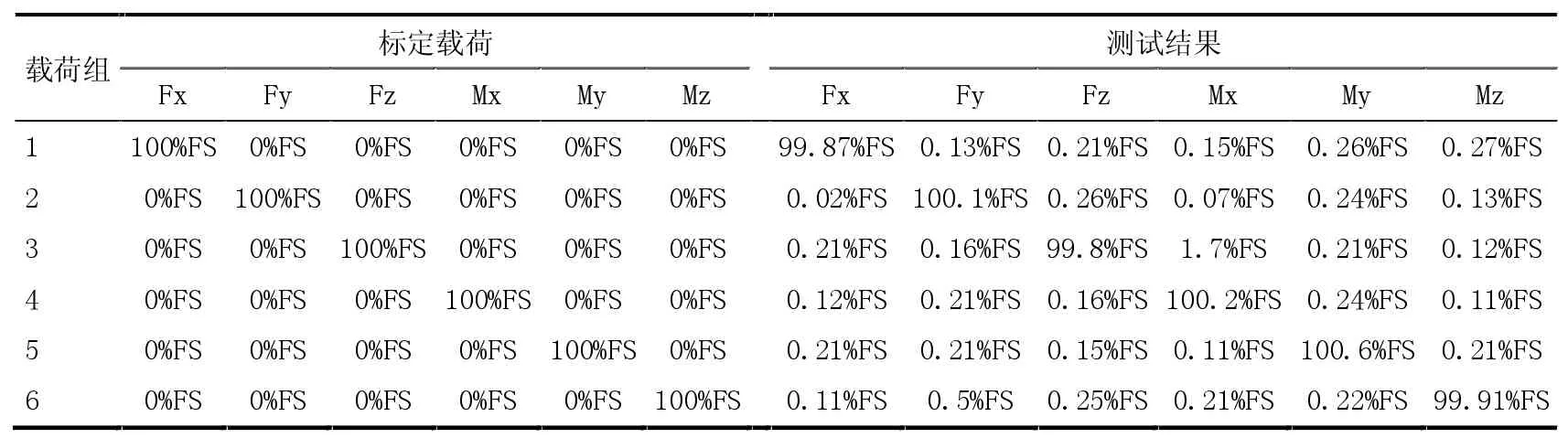
表1 标定后六维力传感器测量精度
4 结束语
六维力传感器赋予了机器人和其他智能装备感知这个世界的能力,随着智能机器人应用场景的不断拓展,未来六维力传感器将有着更为广阔的应用领域。本文阐述了六维力传感器的工作原理、数学模型,设定了静态标定加载方法,经过实验研究,完成了传感器的标定实验,表明六维力传感器的测量精度和准度良好。通过交叉样本点的联合加载标定,充分体现出传感器的非线性效应,对解耦算法的数学模型进行设计,准确标定出高准度的六维力传感器。
