电流型LCL逆变器矢量模型预测
2022-11-21董奕君王继忠
董奕君,李 想,王继忠,杨 凯
(北华大学电气与信息工程学院,吉林 吉林 132021)
新型电力电子器件在电网的投入与使用,为绿色电能生产与转换提供了广阔的发展空间.但随着高频电力电子器件的普遍使用,也导致并网逆变器输出电流含有大量高频谐波.为了抑制谐波[1-4],通常会在逆变器输出端加上滤波器.相比于传统L滤波器,LCL滤波器对高频谐波的抑制能力更强,并且具有成本低、运行稳定等优点.多年来,LCL并网逆变器控制方法一直是研究的重点[5-6],人们不断探索、创新,旨在找到LCL型并网逆变器的最优控制策略[7].传统的无源控制功率损耗高、可控性差,而矢量预测控制具有动态响应快、建模直观、无需复杂庞大计算、可控性高等优点,可以弥补无源控制的缺陷.矢量预测控制通过预测逆变器工作状态,在不同时刻选择最有效的电压矢量,从而使LCL型并网逆变器的输出电流获得最优控制[8].
最早提出,也是最基础的、在电气领域应用最为广泛的矢量控制方法是单矢量模型预测控制.文献[9]针对永磁同步电机模型,利用有限集寻优的方式,将8种开关序列逐步代入价值函数,分别比对每组价值函数,选出最小值,并将此电压矢量作用于永磁同步电机.双矢量模型预测电流控制分为占空比模型预测控制及广义双矢量模型预测电流控制.文献[10]针对传统三相并网逆变器采用占空比模型预测控制,根据代价函数选出一个电压矢量,再由无差拍计算出所选有效电压矢量的作用时间,剩余时间由零电压矢量输出;文献[11]针对三相PWM逆变器采用广义双矢量模型预测控制,将1个时间周期分割成了两段,每个时间段依次寻优,并有序输出相应的两个电压矢量;文献[12]针对NPC型三电平逆变器提出一种新型可平衡中点电位电压的双矢量模型预测电流控制;文献[13]针对整流器提出一种三矢量模型预测电流控制,在1个采样周期内先后输出3个电压矢量.虽然矢量模型预测控制在电气领域已得到广泛应用,但未见有针对LCL并网逆变器矢量模型预测电流控制的研究.本文提出电流型LCL并网逆变器矢量控制策略,并对比分析3种矢量控制策略,旨在找到LCL并网逆变器的最优控制策略.
1 LCL并网逆变器数学模型
1.1 LCL并网逆变器工作原理
图1为LCL并网逆变器的基本结构.其中:Udc为直流电压;e为电网电压;C1为直流侧电容;i1为逆变器侧电流;i2为网侧电流;i3为电容支路电流;C为滤波电容;L1为逆变器侧电感;L2为网侧电感;R1为逆变器侧等效电阻;R2为网侧等效电阻;S1~S6为IGBT.
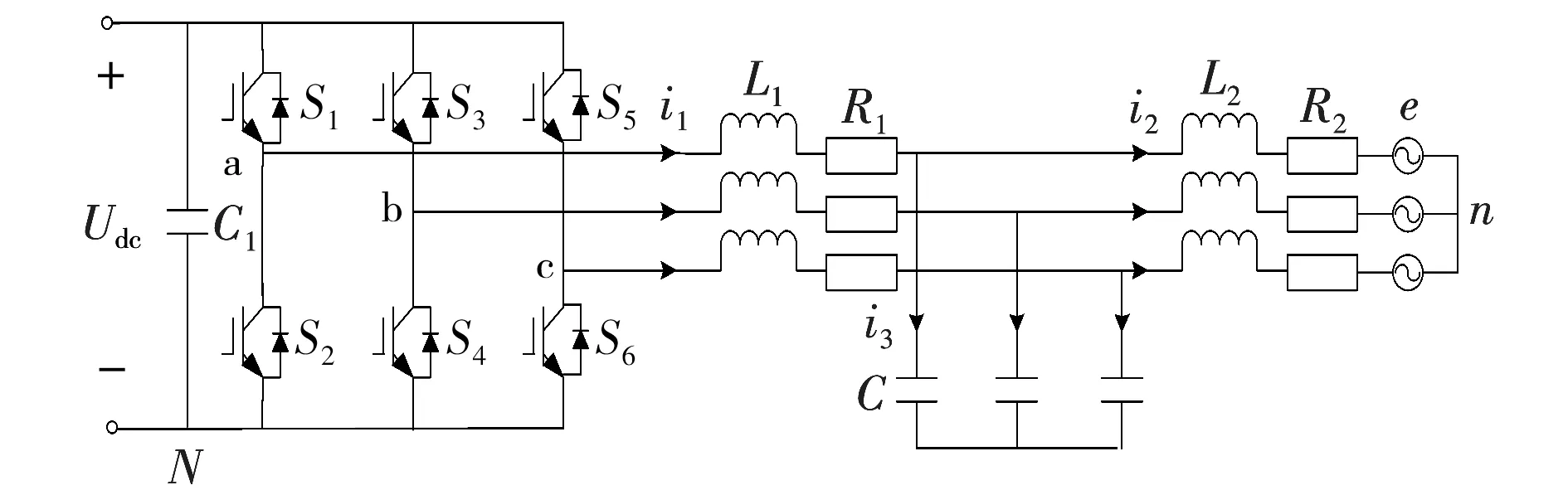
图1 三相LCL型并网逆变器结构
为避免短路,桥臂上、下两个开关不能同时工作.Sa、Sb、Sc分别代表3组桥臂的导通或关断状态,习惯上规定S=1代表上桥臂导通、下桥臂关断;S=0代表下桥臂导通、上桥臂关断.表达式为

1.2 两相旋转坐标系下LCL型并网逆变器数学模型
LCL逆变器控制数学模型:
(1)
(2)
(3)
式中:uCdq为电容电压;i1dq为逆变器侧电流;edq为电网电压;i2dq为网侧电流[14];C为LCL滤波电容;L1为逆变器侧电感;L2为网侧电感;ω为电网频率.
本文不考虑i2dq、uCdq变化,将其当作常量[13],则有
(4)
对式(3)使用欧拉公式得到LCL型逆变器侧电流控制模型,由此可以得到逆变器可输出的电压矢量同逆变器侧电流矢量之间的关系式:
式中:udq(k)为逆变器在当前周期输出的电压矢量;Ts为单位采样周期.
2 电流型LCL逆变器矢量预测控制
2.1 电流型LCL逆变器单矢量预测控制
单矢量MPC算法在每个采样周期只输出1个开关状态.对电压值、电流值进行采样,代入预测模型,得到下一周期的预测值[15];用代价函数选出最优电压矢量,以输出理想控制电流:
(5)
式(5)是模型预测电流控制的代价函数.
2.2 电流型LCL逆变器双矢量预测控制
本文研究的双矢量控制为广义双矢量控制.广义双矢量模型预测控制将1个采样周期分成了两部分:首先按单矢量控制方法,在7个电压矢量中找到1个最优矢量,作用于第1部分;第2部分,在剩下的6种电压矢量中找到最适合的电压矢量.第1部分的电压矢量输出作用完成后,若预测值和参考值之间有较大误差,那么就找到第2个电压矢量来修正或减小误差,以达到输出电流最优的控制效果[16].
双矢量MPC预测值:
(6)
式中:Sd1、Sd2、Sq1、Sq2分别为ui、uj在两相旋转坐标系下的电流斜率.
零电压矢量作用下的电流斜率:
(7)
得到Sd0、Sq0后,可再次根据式(3)得
(8)
式中:u1d、u2d、u1q、u2q分别为同一周期内作用的两个电压矢量所产生的dq轴电压分量.
联立式(6)、式(7)、式(8)得出作用时间:
需要说明的是,t1及t2应该在单位周期内.若t1或t2出现负数,那么整个采样周期由非负矢量控制;若t1或t2有1个大于采样周期,那么该采样周期由该电压矢量控制.最后,根据代价函数选择电压矢量组合,并按照各自的作用时间相继输出.
3 电流型LCL逆变器三矢量预测控制
相较于LCL单矢量模型预测控制,LCL双矢量模型预测控制的控制精度、寻优次数有了提升.但双矢量控制寻优次数较多,系统运算量庞大,而LCL三矢量的控制可以避开以上缺陷.
3.1 基本原理
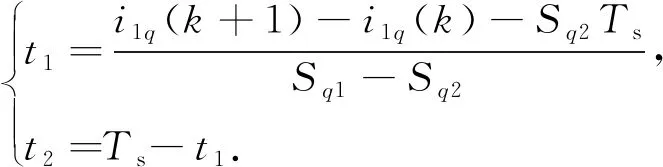
三矢量MPC算法把单位周期分成3部分:第1部分,从6个非零电压矢量中选出最优控制矢量;第2部分,从剩下的5个非零矢量中找到合适的控制矢量;第3部分,输出零电压矢量.虽然三矢量控制在1个周期内输出3个电压矢量,但是其寻优次数却低至30次,大幅减少了系统的运算量,减轻了硬件损耗.控制原理见图2,模型预测控制框图见图3.

图2 三矢量MPC原理
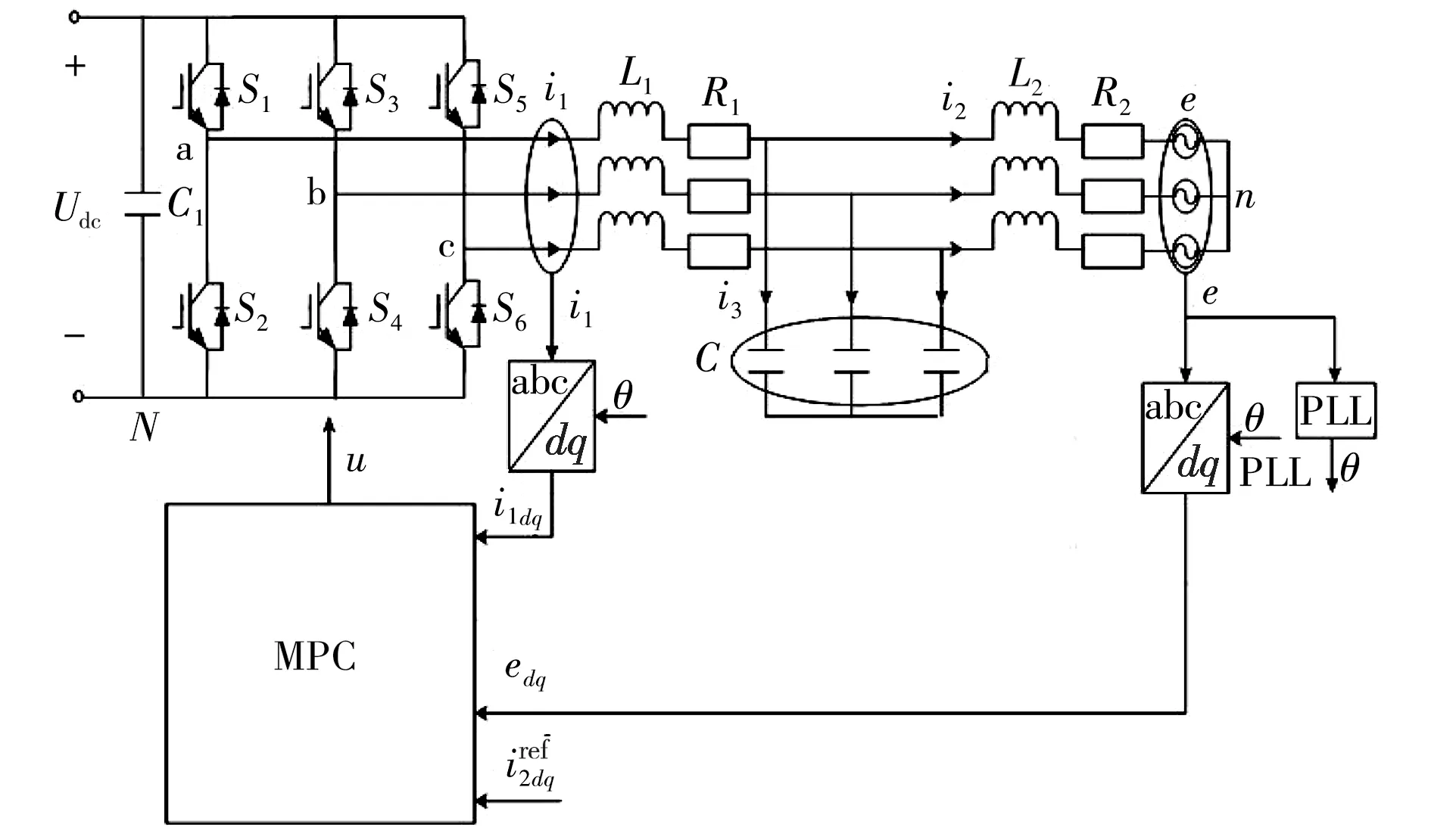
图3 三矢量模型预测控制
3.2 作用时间
三矢量MPC算法控制的单位周期Ts将被分成3部分.设两个有效电压矢量为ui、uj,ui的作用时间为t1,uj的作用时间为t2;零电压矢量电压为uz,作用时间为t0,预测电流:
(9)
式中:Sd1、Sd2、Sd0、Sq1、Sq2、Sq0分别为ui、uj、uz在两相旋转坐标系下的电流变化斜率.
由式(9)、式(7)、式(8)得


t0=Ts-t1-t2.
几种特殊情况:
1)若t0不在0~Ts范围内,且t1、t2在0~Ts范围内,则两个有效电压作用于1个采样周期.
2)若t0在0~Ts范围内,且t1或t2在0~Ts范围内,则1个有效电压矢量和零矢量作用于1个采样周期.
3)若t0不在0~Ts范围内,且t1或t2在0~Ts范围内,则1个有效电压矢量作用于1个采样周期.
三矢量合成见图4.U1与U2合成得到OA矢量,由于零矢量的存在,OA矢量不能作用于全周期;OB表示3个基本矢量合成的新矢量;零矢量作用于BA段.
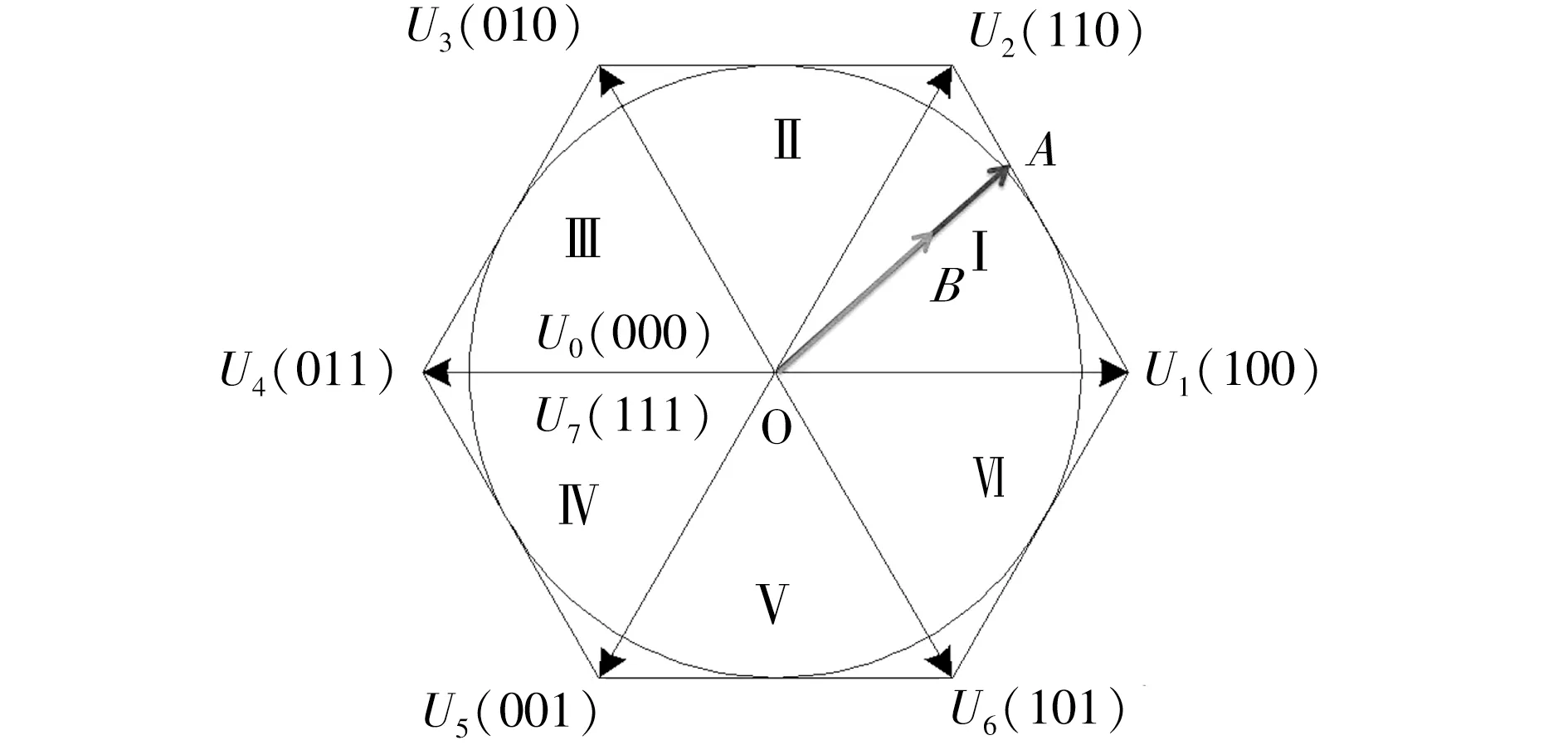
图4 三矢量合成
4 3种矢量模型预测控制方法对比
本文提出了电流型LCL并网逆变器的单矢量、广义双矢量、三矢量模型预测控制方法.针对上述3种方法,从作用时间计算方法、幅值范围、寻优次数等进行对比,见表1.由表1可见,三矢量控制既可以提高系统的控制精度、减小系统误差,又能减少寻优次数,降低硬件损耗.

表1 3种控制方法对比
5 仿真分析
为验证本文提出的电流型LCL并网逆变器三矢量模型预测控制方法的可靠性和准确性,在MATLAB/Simulink平台上进行仿真试验.LCL并网逆变器的仿真参数见表2.

表2 系统仿真参数
5.1 系统稳态性能
3种模型的稳态电流波形见图5.由图5可见:单矢量控制的电流纹波最大,波形失真也最严重;双矢量控制的电流纹波较小,波形失真也有所减小;三矢量的电流纹波最小,波形基本为标准正弦波.由此看出,随着控制矢量的增加,电流的纹波及失真随之减小.三矢量算法控制下的纹波最低,同时波形的标准正弦度也最好.
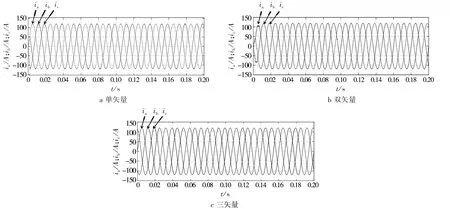
图5 电流稳态仿真结果
5.2 系统的动态性能
模型预测控制动态仿真结果见图6.由图6可见:在0.1秒时,并网电流参考值从120 A突变为200 A.单矢量控制在电流突变开始的半个周期内,电流并不稳定;双矢量控制在电流突变开始的半个周期内,电流会出现略微不稳定现象,但是要优于单矢量模型预测控制策略的动态响应;三矢量控制策略针对电流参考值突变能够做出快速响应,跟踪性能极好,并且在电流突变的半个周期内,电流没有出现不稳定现象.可以看出,三矢量模型预测控制策略动态性能更好一些.

图6 模型预测控制动态仿真结果
5.3 系统频谱
网侧电流频谱见图7.由图7可见:单矢量的并网电流THD为3.59%,双矢量的并网电流THD为2.67%,三矢量的并网电流THD为0.92%.采用单矢量和双矢量模型预测控制策略时,并网电流中含有较多的电流纹波;采用三矢量模型预测控制策略时,LCL逆变器并网电流中谐波含量较少,标准正弦度较高,具有良好的电流跟踪性能.

图7 网侧电流频谱
6 结 论
本文提出了电流型LCL并网逆变器模型预测矢量控制,分别对单矢量控制策略、广义双矢量控制策略、三矢量控制策略进行建模,通过仿真对比分析了3种控制策略的动、稳态性能以及电流频谱.结果表明:在3种矢量控制中,电流型LCL逆变器三矢量模型预测控制策略最优,与单矢量与双矢量控制相比,可以有效减少并网电流的谐波含量,在参考电流突变时,依然可以较快地跟随稳定值,具有较高的控制性能和鲁棒性;与双矢量控制相比,寻优次数得到了改善,减小了计算复杂度.研究结果对于研究分布式发电系统具有重要意义.
