提高YFOSC光谱观测效率方法的研究
2022-11-16陈宇扬王传军范玉峰伦宝利
陈宇扬,王传军,范玉峰,伦宝利
(1. 中国科学院云南天文台,云南 昆明 650216;2. 中国科学院天体结构与演化重点实验室,云南 昆明 650216;3. 中国科学院大学,北京 100049)
光谱观测一直是丽江2.4 m望远镜最重要的观测模式之一。2012年,2.4 m望远镜卡焦终端快速切换系统装配完成,观测者可以根据观测需求选择云南暗弱天体成像光谱仪、丽江系外行星探测仪(Lijiang Exoplanet Tracker, LiJET)、高色散光谱仪(High Resolution Echlle Spectrograph, HiRES)、多色测光系统(Princeton Instruments VersArray1300B CCD, PICCD)和中国丽江积分视场光纤光谱仪(China Lijiang Integral Field Unit, CHiLI)等科学终端,并且可以在半分钟以内进行相互切换[1-2],覆盖了长缝、光纤与积分视场光纤的光谱观测,实现2.4 m望远镜从测光观测到低、中、高色散光谱观测的科学需求。图1为2.4 m望远镜的光路图,云南暗弱天体成像光谱仪位于卡焦直通端口。大部分光谱观测目标通常较为暗弱、光度低,导致观测数据信噪比较低。在视宁度一定的情况下,望远镜跟踪精度是影响星像与云南暗弱天体成像光谱仪狭缝耦合效率的重要因素,而星像-狭缝耦合效率是光谱观测数据质量的决定因素。因此,为了实现光谱观测的高质量与高效率,2.4 m望远镜的控制系统与导星系统硬件相互配合的基础上需要达到3个要求,以满足云南暗弱天体成像光谱仪光谱观测的科学需求。(1)小指向误差:目前,2.4 m望远镜在使用指向模型修正后,指向误差小于4″,可以保证观测目标不会偏离视场;(2)高精度入缝:指向观测目标后,确保星像与狭缝耦合的高精度与高效率;(3)高精度闭环跟踪:由于大部分的光谱观测目标具有较暗弱的特点,在一次观测过程中科学采集相机的积分时间通常在1 000 s以上,因此,需要保证望远镜在此期间具备较高的闭环跟踪精度。

图1 2.4 m望远镜光路Fig.1 The optical path of 2.4-metre telescope
1 光谱观测
1.1 光谱观测流程
如图2,云南暗弱天体成像光谱仪的光谱观测是在望远镜观测控制系统(Observation Control System, OCS)的各个子系统共同参与下完成的,其中TCS为望远镜控制系统;ICS为仪器控制系统;OAS为观测辅助系统。目前,云南暗弱天体成像光谱仪光谱观测的流程大致为观测者利用望远镜观测控制系统提供的用户接口输入待观测目标的坐标;望远镜指向观测目标后,通过望远镜控制系统发送命令,调整望远镜指向,实现待观测目标在视场内的移动;计算待观测目标在相机靶面的坐标与狭缝中心位置坐标之差,小于阈值即认为该目标位于狭缝中心或中轴线上;根据观测目标类型、视宁度等选择不同尺寸的狭缝,加入狭缝并拍摄一幅狭缝像,检查无误后加入光栅,并开启导星相机进行闭环跟踪,同时根据待观测目标的科学需求选择光谱观测积分时间;观测完成后,检查数据并归档。
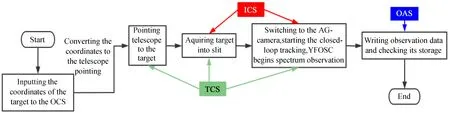
图2 云南暗弱天体成像光谱仪光谱观测流程Fig.2 The process of YFOSC spectrum observation
1.2 卡焦导星系统
1.2.1 卡焦导星系统的光学结构
导星系统作为闭环跟踪的重要组成部分,是提高望远镜光谱观测效率的基础。为了满足卡焦终端仪器的高精度测光以及光谱观测的需求,2.4 m望远镜卡焦端配备了基于偏置导星的自动导星系统[3]。如图3,通过卡焦焦点前的45°反射镜提取望远镜主视场40′ × 40′内4′ × 4′的视场作为自动导星的视场。为了提高导星电荷耦合器件(Charge-Coupled Device, CCD)的覆盖视场和极限探测星等,在导星光路中增加缩焦系统,缩焦后的导星视场从4′ × 4′扩大到10′ × 10′,每个13.5 μm的像素对应0.24″天空角。经过测试,在视宁度为1.5″时,自动导星相机2 s积分时间可探测的极限星等约为17 mag。此外,自动导星机构可以取不遮挡仪器视场的10~20′环形区域作为导星视场,同时观测人员可以通过ag-rad命令实现45°平面镜的径向移动,以解决导星相机视场内缺少亮星,无法完成导星任务的问题。2.4 m望远镜导星视场如图4。
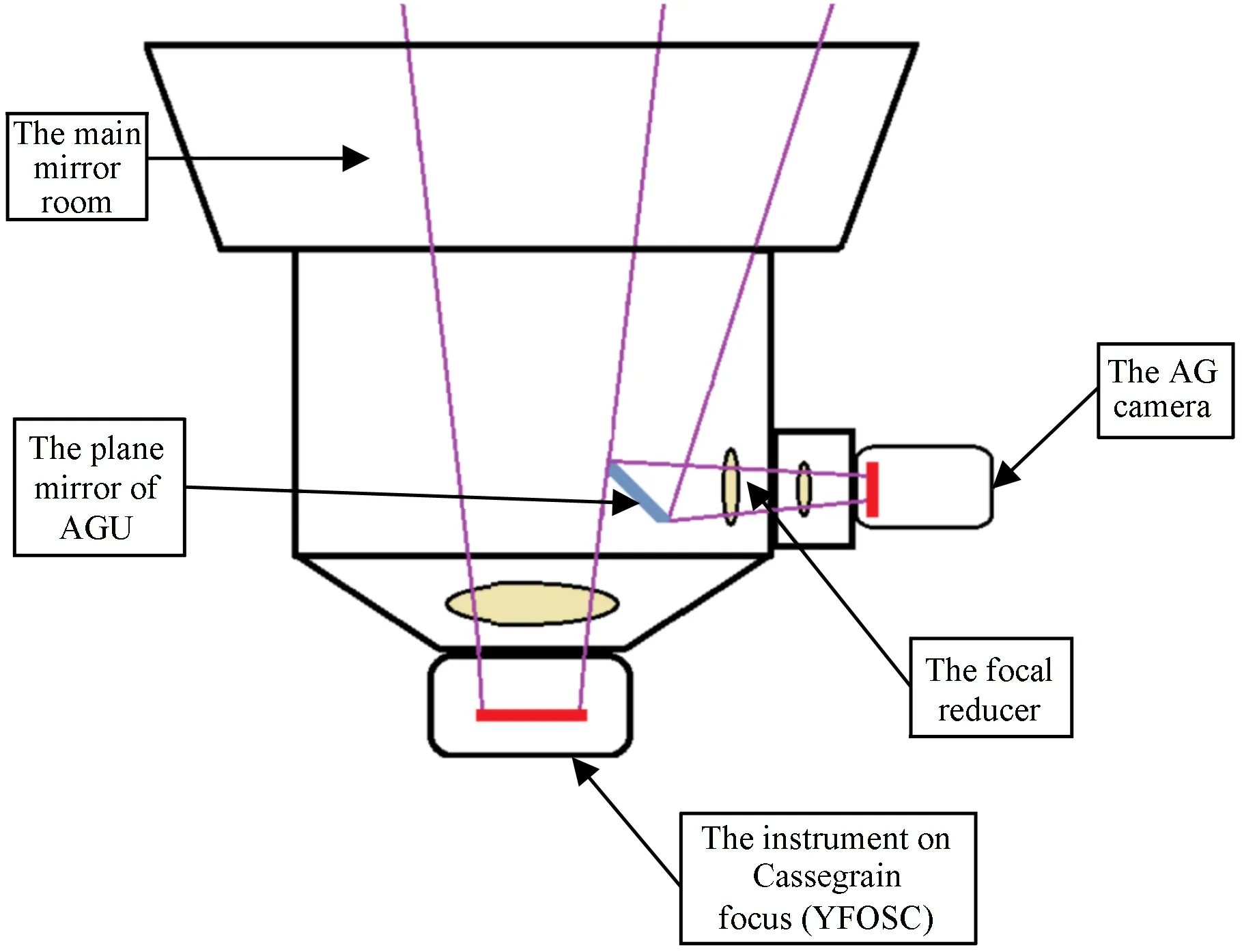
图3 2.4 m望远镜卡焦导星系统光路

图4 2.4 m望远镜导星视场
1.2.2 卡焦导星相机
随着使用时间的增加,原导星相机CCD靶面的坏点越来越多,导致探测极限星等的能力下降,极大影响了望远镜闭环跟踪时星像质心提取的成功率。2013年,2.4 m望远镜运维团组对自动导星相机进行更换,新旧导星相机的性能对比见表1。

表1 新旧导星相机的性能对比Table 1 The performance comparison of the new and former AG-camera
更换后的导星相机全幅读出时间由原来的10 s减少到4 s左右,缩短了寻找导星目标的时间,提高了误差采样和反馈的频率。此外,新导星相机的量子效率峰值达87%,提高了在同等观测条件下导星系统的极限探测星等[4-5]。然而由于导星系统改造时经费有限,选择的导星相机的CCD靶面较小,对应天空角仅为2′ × 4′,并没有充分利用缩焦后的导星视场(10′ × 10′),因此,未来将配置更大成像靶面的导星相机,提高2.4 m望远镜的光谱观测效率。
1.3 影响光谱观测效率的因素
对星像入狭缝与望远镜闭环跟踪算法进行优化是提高光谱观测效率的重要途径。在2.4 m望远镜上使用云南暗弱天体成像光谱仪进行多年的光谱观测后,通过总结经验,运维团队发现在视宁度一定的情况下,星像入狭缝的效率及望远镜闭环跟踪的精度是影响光谱观测效率的主要因素。
1.3.1 星像-狭缝耦合的效率与精度
对于原先的长缝光谱观测算法,在望远镜指向目标天区后,如果对单一目标进行光谱观测,首先需要计算目标星像质心与狭缝中心位置在像平面的坐标偏差,然后由观测人员将该偏差量输入望远镜控制系统,望远镜控制系统将像平面的偏差量通过矩阵运算变换为望远镜的指向校正量。一次这样的操作难以保证星像与狭缝正确耦合,经过多次重复调整方可实现星像入狭缝,这一过程通常需要10 min左右。将科学目标和选取附近流量恒定的恒星(以下称为参考星)导入狭缝同时观测,可以同时获得穿过完全相同大气层且具有完全相同观测条件的目标和参考星光谱。这需要在移动望远镜指向的同时旋转视场,使这两个目标均进入狭缝,需要的时间往往超过10 min。以云南暗弱天体成像光谱仪常用的天空角2.51″的狭缝为例,狭缝宽度对应像平面8.9个像素,而从目标的定标精度可以反推目标在狭缝中心的位置精度要求。因此,对图5的单一目标进行光谱流量定标,至少要保证该目标一半以上的星光进入狭缝,即该星像的质心与狭缝中心位置在像平面上的偏差不大于4个像素。如果需要同时观测科学目标和参考星,如图6,由于科学目标和参考星在狭缝中心的偏差引起光子损失的差异,从而给传统的流量定标方法引入新的弥散,因此,科学目标和参考星的质心与狭缝中线耦合的偏差应越小越好,通常在像平面上要保证误差小于0.5个像素。

图5 单一目标入缝Fig.5 Acquire single star into slit
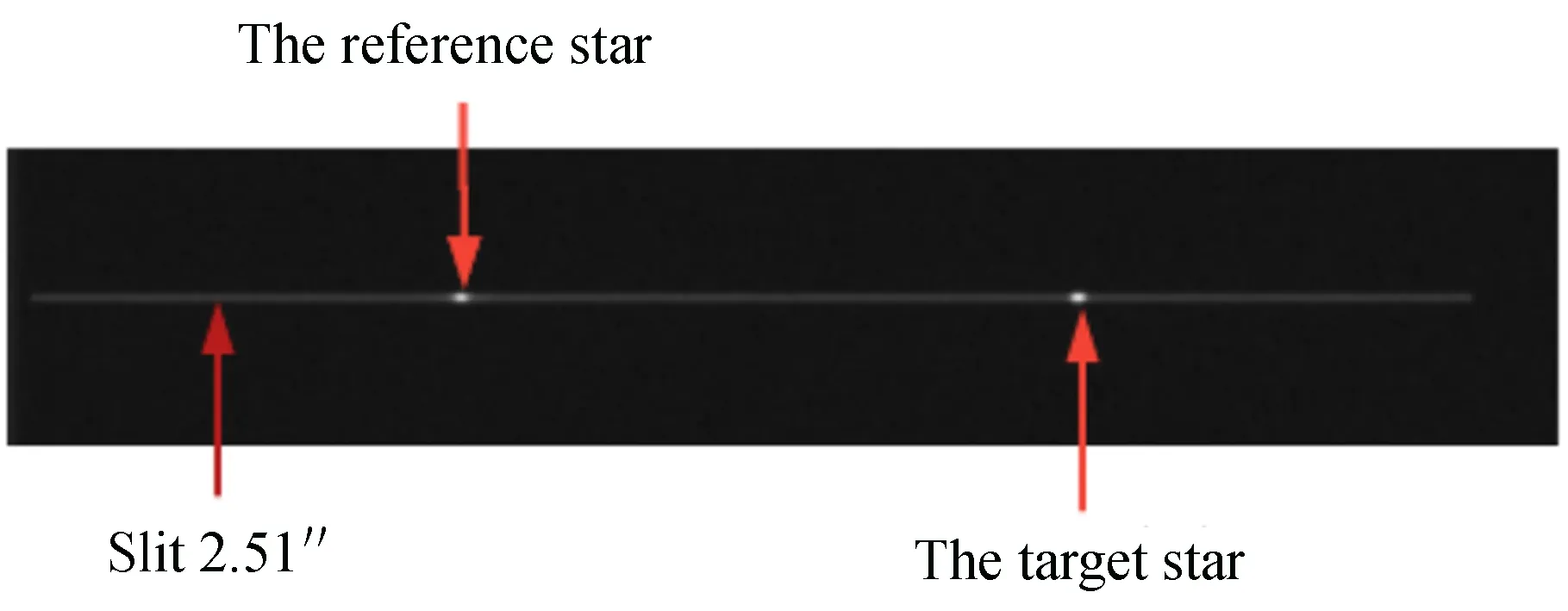
图6 科学目标和参考星同时高精度入缝
人工调整望远镜实现上述过程不仅需要观测人员的实操经验,而且效率低下,浪费了宝贵的观测时间,此外星像入狭缝的精度也需要较长时间才能保证。
1.3.2 望远镜闭环跟踪精度
之前的望远镜闭环跟踪算法是 “单亮星” 法,即在目标移动到狭缝中心位置后,启动导星相机并提取导星视场中最亮的星像质心,比较前后帧中该星像坐标偏移量,实现望远镜的闭环跟踪[6]。然而,如果视场中存在相邻的亮星干扰,算法会将错误的星像坐标输入望远镜控制系统,从而影响光谱观测的数据质量。因此,闭环跟踪时要保证星像不能偏出狭缝,即在积分时间内星像质心与狭缝中心位置的偏移量不超过1″。
基于以上两个影响光谱观测效率的关键因素的分析,我们需要针对这两个因素进行算法优化,以提高光谱观测的整体效率。
2 点模式匹配算法
优化后的星像入狭缝算法与望远镜闭环跟踪均应用了点模式匹配算法。该算法是在文[7]提出的PPM(Point-Pattern Matching)算法的基础上改进得到的[7],本节以该算法在2.4 m望远镜闭环跟踪过程中的应用为例对算法进行介绍。Murtagh点模式匹配算法首先建立基于图像中各个星像特征(星等、邻星距)的特征向量集;然后对参考帧与比较帧的特征向量集进行相似度和阈值筛选,从而完成匹配。
2.1 星像特征向量集的建立

2.2 基于特征向量集相似度的匹配星对提取
本文定义导星相机拍摄的第1帧图像为参考帧,续帧为比较帧。完成星像特征向量提取后,需要对特征向量进行匹配并计算匹配相似度,得到匹配的星对。对于比较帧中的任一星i′,构建特征向量集{Pi′j′|i′≠j′,i′∈N,1≤j′≤N-1},其中Pi′j′=d2(i′,j′),并计算Pij与Pi′j′之间的欧氏距离(Euclidean Distance)。欧氏距离即n维空间中两个点之间的实际距离,数学表达式为
(1)

图7 特征向量参数Fig.7 The feature vectors parameters
其中,x=(x1,...,xn),y=(y1,...,yn)均是n维空间的向量。
从(1)式可以看出,欧氏距离d的取值范围为(0~∞)。参考通常的相似度计算,取值范围在[-1, 1]之间,因此,最好对d求倒数将结果控制在(0, 1]之间,作为衡量匹配相似度的参量,
(2)

(3)
以上所述即为点模式匹配算法在2.4 m望远镜闭环跟踪过程中的应用。下一节星像入狭缝时的星表匹配法与此类似,由从星表中提取的指向天区图像对应闭环跟踪时的参考帧,而相机拍摄的天区图像对应闭环跟踪时的比较帧。
3 星像入狭缝算法的优化
云南暗弱天体成像光谱仪进行光谱观测时,望远镜指向观测目标后,还需要将目标星像移入狭缝的中心位置,使星像与狭缝的中心位置正确耦合,保证更多的星像能量最终到达相机,提高观测数据的信噪比,从而提高观测质量。因此,在光谱观测积分前,我们需要利用相机拍摄的图像完成目标星像入狭缝的工作。其中星像入狭缝的算法按时间顺序可分为 “粗调” 和 “精调” 两步,具体流程如图8。

图8 星像入狭缝的流程Fig.8 The process of acquire stars into slit
3.1 指向“粗调”
指向“粗调”的目的是将星像尽可能接近狭缝中心位置。在指向 “粗调” 时,星像坐标有两种解算方式。(1)使用Astrometry.net解算星像坐标[8-9],当望远镜指向目标天区后相机开始曝光,并对所得图像利用Astrometry.net解算视场内星像的世界坐标系下的坐标。在成功解算视场内星像的世界坐标系坐标后,可以指导望远镜指向正确的赤经和赤纬,从而使待观测目标星的质心像平面坐标接近狭缝中心位置。但由于Astrometry.net解算算法的限制,通常视场内有3颗以上可探测的星像时才能成功解算。即便如此,Astrometry.net解算的星像世界坐标系坐标的高精确度使其依然成为指向 “粗调” 时首选的星像匹配方式。此外,利用Astrometry.net产生的星像世界坐标系坐标数据还可以用于监测望远镜的指向性能,并用来改进望远镜的指向模型。
(2)星表模式匹配法。在目标天区中的可见星像较少时,Astrometry.net对星像坐标的解算可能失败,这时就可以采用星表模式匹配法进行星像匹配。首先在观测之前,对待观测目标星对应天区的FITS图像进行预处理,添加焦面比例尺α、场旋角ROT、目标星像的世界坐标系坐标以及它们质心的像平面坐标(从星表中推算得到)等参数。然后应用点模式匹配算法,将由星表产生的星像像平面坐标与相机获取的星像像平面坐标进行点模式匹配,并将该偏移量的均值通过坐标变换传递到望远镜控制系统,实现望远镜指向 “粗调”,以达到星像与狭缝正确耦合的目的。
3.2 指向 “精调”
指向 “精调” 的目的是使星像质心位置与狭缝中心尽可能重合。在完成指向 “粗调” 后,通常待观测目标星的像平面坐标与狭缝中心位置像平面坐标距离最近,故以狭缝中心为圆心,5~10 pixel为半径,利用SExtractor检索该圆形范围内的最亮源,并得到其质心坐标[10]。然后逐步迭代计算目标星像在像平面上的质心坐标和其与狭缝中心位置坐标之间的偏差量以 “精调” 望远镜的指向,直到该偏差量小于公差范围内阈值。此外,如果需要同时观测两个目标,则在视场内最亮的目标移入狭缝中心后,根据 “粗调” 时解算的另一个目标对应的像平面坐标旋转视场,从而实现两个目标均与狭缝正确耦合。
图9为视场旋转前后的对比图,红框内为视场旋转前的天区,背景为视场旋转后的图像(目标星为17L08,拍摄时间UTC 2022-02-03 18:57:36.945,曝光时间5 s)。蓝色和绿色箭头所指处均为待观测目标星,其中绿色箭头所指为CCD靶面中心(即狭缝中心)附近最亮的源。图10为该目标旋转视场后的狭缝像,该狭缝宽度对应天空角5.05″,所占像素为17.67 pixel。如果该亮星恰为待观测目标星,即对单一目标进行光谱观测,则不需要旋转视场,如图11。

图9 视场旋转前后的对比Fig.9 The Comparison of before and after FOV rotated

图10 图9中星像的狭缝像Fig.10 The star-slit image of Fig.9

图11 单一目标的狭缝像Fig.11 The single star-slit image
经过测试,优化后的星像入狭缝算法使星像与狭缝耦合时的各项指标均得到了提高,极大地提高了光谱观测的效率。具体对比项如表2,其中人工星像入缝测试时间为UTC 2021-01-08 15:50:22.621至2021-01-08 21:59:15.340,观测目标为J0309和pg1012+008;新星像入缝算法的测试时间为UTC 2022-02-03 18:49:28.948至2022-02-03 22:01:03.105,观测目标为HD 105183和17L08。

表2 新旧星像入狭缝算法的比较Table 2 The comparison of formal and present guiding system
图12为表2所述的采用人工星像入缝法时双星入缝精度,可以看出视场旋转后无法保证星像质心均位于狭缝中轴线处。图13和图14为表2所述的采用人工星像入缝法时单星入缝精度,可以看出第1次移动望远镜后星像质心与狭缝中线出现较大偏移量,如图13;而多次移动望远镜后,星像质心与狭缝中轴线偏移量可减小,如图14。

图12 人工入缝狭缝像(双星)Fig.12 Artificially acquiring two stars into slit

图13 人工入缝法第1次移动望远镜后的狭缝像(单星)

图14 人工入缝法多次移动望远镜后的狭缝像(单星)
4 望远镜闭环跟踪算法的优化
为了保证光谱观测的质量,系统需要通过自动导星实现望远镜的闭环跟踪,保证目标星像始终在狭缝内。在实际观测过程中,当得到图10或图11的狭缝像后,就可以在相机前加入光栅,同时启动导星相机开始望远镜的闭环跟踪,之后再曝光,以确保云南暗弱天体成像光谱仪在长积分时间内光谱数据的质量。流程如图15。

图15 望远镜闭环跟踪流程图Fig.15 The process of telescope close-loop guiding
望远镜闭环跟踪是通过比较导星相机参考帧中的星i与比较帧中的星i′在像平面上的位置偏移量,校正望远镜的跟踪误差。步骤如下:

(4)
图16为参考帧(a)、成功匹配的帧与参考帧叠加后(b)的示意图,其中参考帧中StarA, StarB和StarC分别与成功匹配的帧中StarA*, StarB*和StarC*为匹配星对。ΔA, ΔB和ΔC分别为这3组匹配星对之间的偏移量,分别对3组偏移量在x轴和y轴方向的投影进行计算并取平均值作为Diffx和Diffy。

图16 星像偏移量Fig.16 The stars offset


将点模式匹配法应用于2.4 m望远镜的闭环跟踪后,我们于2021年8月3日测试了望远镜的跟踪精度。测试结果表明,1 h闭环跟踪精度优于0.5″,同时在像平面上的星像位置偏移量不大于1.8 pixel。而原 “单亮星” 跟踪法在视场内没有亮星干扰情况下的1 h闭环跟踪精度为0.5″,若存在亮星干扰,可能出现星像 “跳变”,导致跟踪失败。由此可见,点模式匹配法使视场中可探测到的星像均得到利用,提高了望远镜长期跟踪的精度与鲁棒性。导星相机像平面星像位置偏移量Diffx和Diffy如图17。

图17 导星相机像平面星像偏移量
5 总结与展望
综上所述,提高2.4 m望远镜云南暗弱天体成像光谱仪的光谱观测效率,离不开星像与狭缝耦合的效率以及望远镜闭环跟踪的高精度,丽江站运维团队在近年已针对这两点进行了不断优化,本文介绍了优化算法以及优化后的效果。但经过测试发现,还有进一步提升的空间,如提升导星CCD的视场和探测能力可以提高云南暗弱天体成像光谱仪的光谱观测效率。
此外,2.4 m望远镜的耐焦切换平台已经装调完毕,实现了耐焦与卡焦、耐焦两个焦点之间的自由切换,本文介绍的相关算法也可以应用于耐焦的导星系统研发过程,从而提高耐焦相关仪器的光谱观测效率,进而可以提升2.4 m望远镜的综合观测能力,开展更多种类的天文观测和科学研究。
