机器人活体供肝切取术的现状与进展
2022-11-16李星霏罗湘李涛
李星霏 罗湘 李涛
21世纪以来,随着微创外科和腔镜技术的发展,微创的概念逐步深入到外科的各个领域。在胃肠外科、泌尿外科、妇科、胸外科、肝胆外科等学科中,微创技术的发展已经非常成熟。2000年达芬奇手术机器人在临床的初步应用,带来了微创手术领域的变革[1]。腹腔镜手术和机器人手术的应用越来越多,在相对较短的时间内取得了巨大的进步,适应证也在不断扩大。即使是非常复杂的肿瘤手术,如食道、胃、肝脏及胰腺切除术,目前也可以使用机器人手术系统治疗[2]。另一方面人们还在探索机器人手术在器官移植中的应用。自1963年开展全球首例肝移植以来,该手术一直被认为是肝衰竭和其他终末期肝病的有效治疗方法[3]。2012年,Giulianotti等[4]首次报道了机器人右半供肝切除术,引起了人们对机器人活体供肝切取术(robotic living donor hepatectomy,RLDH)在肝移植中应用的争论。本文将阐述机器人手术在肝移植领域的应用现状及未来发展,以及机器人手术系统与传统手术方式之间的比较。
1 机器人手术的优势
Cherqui等[5]于2002年首次报道了21例通过对肝左外叶进行腹腔镜活体供肝切取术(laparoscopic living donor hepatectomy,LLDH),由此开启了微创活体肝移植的先河。腹腔镜设备及手术方式日益普及,推动了LLDH的应用。但腹腔镜中二维手术视野缺少三维立体效果,不能达到预期的三维视图;腹腔镜器械的移动限制在4个自由度,而人类手腕的移动是7个自由度;腹腔镜器械多为单一关节的运动;生理性手震颤伴随长时间的手术时耗在微创操作中被放大,不利于手术的精细操作[6]。
机器人手术的发展正是通过以下特点解决了传统腹腔镜手术的局限性:(1)稳定、卓越的三维视图效果和提高10倍的手术视野放大率,增强了视觉感知;(2)应用无震颤设计的最佳人体工程学,具有更广泛的角度;(3)精确的外科解剖能力,重现了人手的7个自由度,实现了人机界面和腕式器械相结合,从而提供了腹腔镜器械所缺乏的灵巧和精确的动作;(4)使缝合更精细,更简便、更快速,从而更有效地解决了这些挑战[6-12]。与LLDH相比,RLDH允许在手术后缝合供者的肝管残端,降低供者胆道并发症的发生率[7,13],并通过机器人图像引导集成技术,解决了胆管分离等关键的术中步骤,使用吲哚菁绿荧光引导提高了胆管分离的准确性和安全性,进行精确的解剖,减少供肝失血和缺血[13-14]。此外,Troisi等[15]的一项研究对75例接受微创供肝切取术(minimally invasive donor hepatectomy,MIDH)的患者进行了LLDH和RLDH的比较,结果表明RLDH对供者同样安全有效。且RLDH在肝门附近解剖和实质离断过程中对血管结构及所有肝段解剖的识别优于LLDH,学习曲线短于LLDH,进行操作时,术者不需要有一定的腹腔镜操作经验,仍能快速掌握该项技术[7,13,16-17],笔者总结的两者优势对比见图1。另外,与开放性供肝切取术(open donor hepatectomy,ODH)比较,RLDH镇痛需求减少、肝脏正常生理功能恢复快、出血量少、住院时间短[7,18-19]。

图1 腹腔镜和机器人在肝脏手术中的优势Figure 1 Advantages of laparoscopic and robotic in liver surgery
2 机器人供肝切取术的现状
2012年,Giulianotti等[4]报道了首例机器人辅助下活体右半肝切除的成功案例,证实了机器人手术系统的可操作性,为机器人技术在肝移植领域的应用奠定了基础。此后,中国台湾地区、沙特阿拉伯和韩国等移植中心与医疗机构已成功复制了RLDH,再次证明了机器人手术的安全性。
中国台湾地区的Chen等[13]报道了13例RLDH,并将其与54例开放手术进行了比较,结果显示两组患者的失血量、并发症发生率和供者恢复时间差异无统计学意义。Broering等[7]通过分析35例机器人右叶供肝切除和70例ODH之间的预后发现,机器人手术可使术后疼痛减轻、失血量减少、住院时间缩短、并发症发生率降低。来自同一移植中心的Troisi等[15]比较了25例机器人左外叶供肝切取术和50例腹腔镜左外叶供肝切取术,认为机器人手术是一种安全的技术手段,在供者并发症发生率和受者预后结局方面与腹腔镜手术相似。而来自韩国的另一份报告比较了52例RLDH、62例ODH和118例LLDH的结果,指出RLDH组的术后并发症发生率与ODH组相似,但住院时间更短;与LLDH组相比,RLDH组的切口美观程度更好[18]。
因全世界的机器人肝移植中心数量有限,仅在印度的3个移植中心总共进行了190次RLDH;在韩国的1个移植中心进行了99次RLDH;在沙特阿拉伯进行了318次RLDH;在中国进行了31次RLDH(其中中国台湾地区30次)[11]。
3 机器人活体左外叶供肝切取术
多项研究报道,机器人辅助肝左外叶切除术在治疗良、恶性肝脏病变方面优于传统开腹手术,并能达到和腹腔镜下肝切除术相似的效果[20-24]。因此,将机器人肝左外叶切除术应用到活体肝移植的供肝切取手术中逐渐成为机器人技术在肝胆外科领域中的研究焦点。肝左外叶有很明显的解剖性外科标志[25]。2017年,Liao等[26]实现了第1例机器人活体左外叶供肝切取术,对1例7月龄胆道闭锁的男性患儿进行机器人辅助下左外叶供肝移植,证实了这一技术的可行性,表明该项术式在未来的微创外科领域的巨大发展空间。通过随访观察,供者术后8 d出院,无任何并发症。受者出现轻度肺部感染,但术后20 d康复出院,受者未发生移植相关并发症,在术中出血量、镇痛评分、住院时间、术后并发症等方面,均获得较理想的效果。Rela等[27]对1例14月龄女性患儿进行左外叶肝移植,进一步证实了该术式的可行性和可重复性,从而安全地推动微创外科尤其是机器人辅助技术的发展。Troisi等[15]也在其回顾性研究中发现机器人活体左外叶供肝切取术术中出血量少、操作时间短、术后镇痛药使用剂量少、供者并发症发生率和移植物排斥发生率低、受者肝功能恢复时间短,与LLDH相比差异有统计学意义,表明手术的安全性与可行性。但关于机器人活体左外叶供肝切取术的前瞻性研究还待补充验证。
4 机器人活体右半供肝切取术
虽然关于机器人右半供肝切取术很少实施,且缺乏安全性和有效性的数据。但自Giulianotti等[4]于2012年第1次报道机器人技术用于右半供肝切取术,此后关于机器人供肝切取术的临床研究逐渐增多。Broering等[7]比较机器人活体右半供肝切取术与开放活体右半供肝切除术发现,虽然机器人手术组的手术时间较开放手术组长[(504±74)min比(331±65)min,P<0.001],但随着应用经验的积累显著降低(P<0.001)。同时机器人手术组术中出血量较开放手术组明显减少,且在两组供者并发症相似的情况下,机器人手术组供者所需镇痛药剂量较少,住院时间也更短(P=0.001,P<0.001),表明机器人活体右半供肝切取术是可行的、安全的、可重复的,较开放手术具有一定优势。韩国一项临床研究对比了52例连续病例中机器人活体右半供肝切取术与ODH和LLDH的疗效,结果发现在三者术后并发症发生率相似的情况下,机器人辅助活体右半供肝切取术刀口更小、出血量更少、住院时间更短,并具有安全性、可行性及推广应用的可能性[18]。Lai等[28]认为MIDH,尤其是通过机器人活体右半供肝切取术具有以下优点:(1)减少组织创伤;(2)减少术后疼痛;(3)减少供者创面面积,增加切口美观度;(4)允许术后更快地恢复正常活动。RLDH的相关研究具体结果见表1。
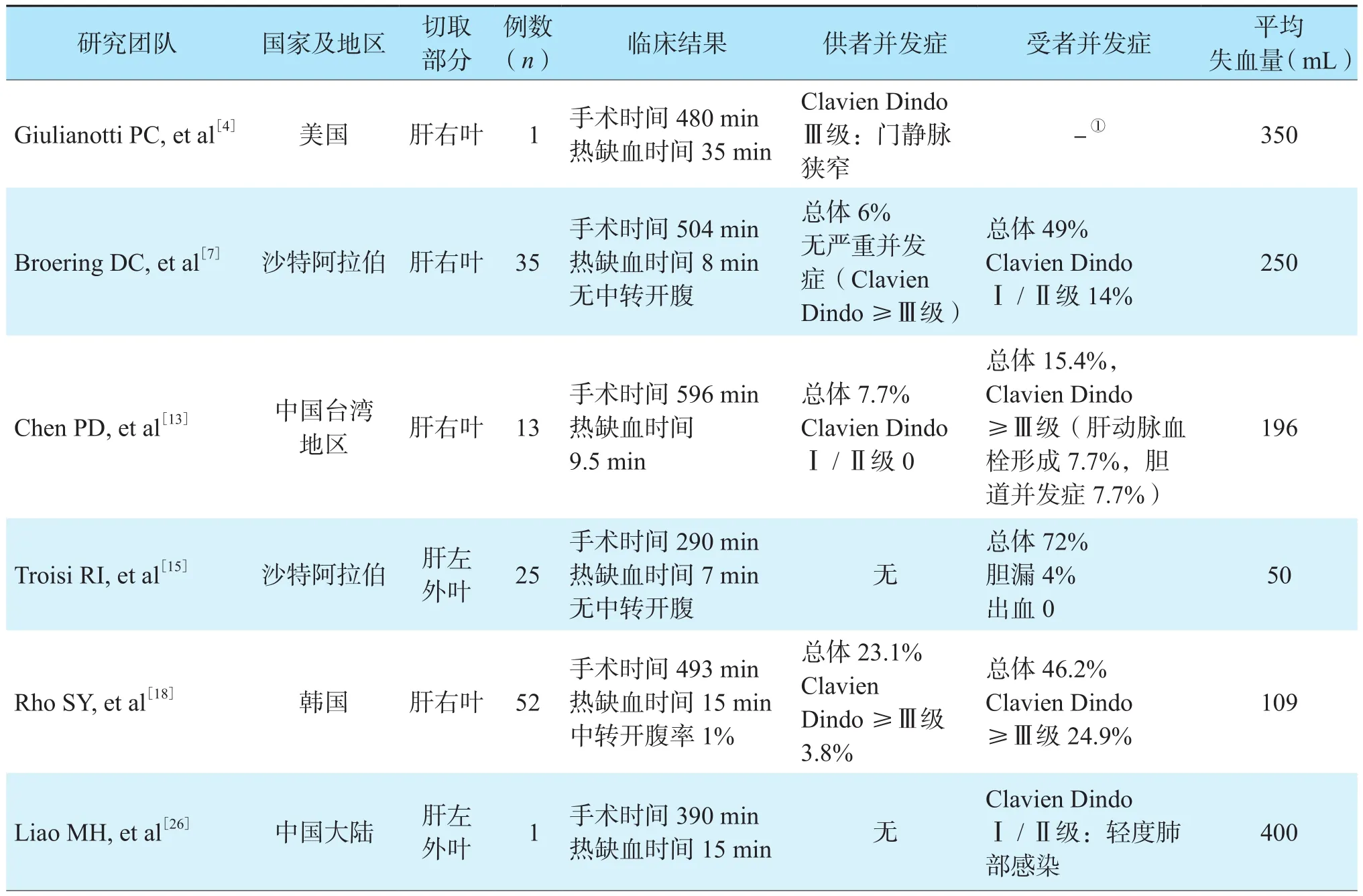
表1 RLDH的相关研究Table 1 Researches on RLDH
5 机器人活体供肝切取术存在的主要困难
RLDH尚不完善,除需考虑因供者安全性及术后生活质量造成的伦理和社会问题外,其局限性主要在于手术时间的延长,而手术长耗时主要考虑以下原因:(1)助手的操作,助手要在狭小空间完成吸引、暴露和更换器械等操作,所以对助手要求更高;(2)手术方式不确定性,目前缺乏相应指南对机器人肝脏手术进行规范化,因此对于不同位置的病变,手术的布局、步骤、入路和器械使用都不一致;(3)缺乏感觉反馈,术者因缺乏对力觉和触觉的灵敏感知,使操作欠佳,如在牵拉,缝合等操作易破坏组织,打结时易扯断缝线;(4)器械的安装,庞大的机器人系统启动和术中更换器械耗时较多。此外,昂贵的费用成本和培训时间等也是在今后推广中的难题[29-36]。
6 展 望
综上所述,目前将机器人手术系统应用于活体肝移植供肝切取手术的病例尚少,且缺乏前瞻性临床研究。虽然在技术上是可行的,但不能证明这一术式的安全性及可重复性,还不能广泛应用到各个移植中心。但事实表明,RLDH具有多角度稳定、灵活的操作及精准,清晰的三维视图效果,独特的震颤抑制技术,较短的学习曲线效应,克服了传统腹腔镜手术的不足,实现了外科手术在微创领域,器官移植领域的精细操作,在肝门部解剖、不同肝段,不同分叶的小部分或大范围肝切除中较单纯腹腔镜操作具有极大优势。随着机器人外科技术的发展,RLDH逐渐成为肝移植中的研究热点。然而机器人技术也存在较高的经济成本与不太明确的远期疗效,及未加规范的手术流程等问题。相信随着外科手术技术,尤其是微创领域的发展,医师手术熟练程度的提高,机器人手术系统在肝胆外科方面的应用会迎来新的突破。