基于GDOP的红外跟踪系统双站交汇测距能力分析
2022-11-12张恒伟刘小虎
王 东,张恒伟,刘小虎
(光电对抗测试评估技术重点实验室,河南 洛阳 471003)
1 引 言
以被动方式工作的红外跟踪系统,具有作用距离远、测角精度高、隐蔽性好等特点,在多套组网条件下还可实现对目标的被动测距[1-4],组网红外跟踪系统的测距能力与目标相对于站点的位置关系密切相关[5-9]。为了评价组网红外跟踪系统的测距能力,引入定位精度几何稀释(Geometrical Dilution of Precision,GDOP)[10]作为评价指标。通过对GDOP的计算,可以得到组网红外跟踪系统中站点测量精度及几何布局对测距能力的影响。本文通过对红外跟踪系统双站交汇测距理论的分析,基于GDOP对红外跟踪系统测距精度进行了仿真,得到了不同条件下绝对测距误差。
2 双站交汇测距理论
双站交汇测距技术通过高精度的测向设备,在两个观测站通过对辐射源测向来完成定位。如图1所示,在实际应用中,站点1和站点2一般不在同一水平面上,设站点1的坐标为S1(x1,y1,z1),站点2的坐标为S2(x2,y2,z2)。对于目标E(xe,ye,ze),两站所测的同一目标方位角和俯仰角分别为α1,α2和β1,β2,S2和E在z1平面的投影分别为S2′和E′。
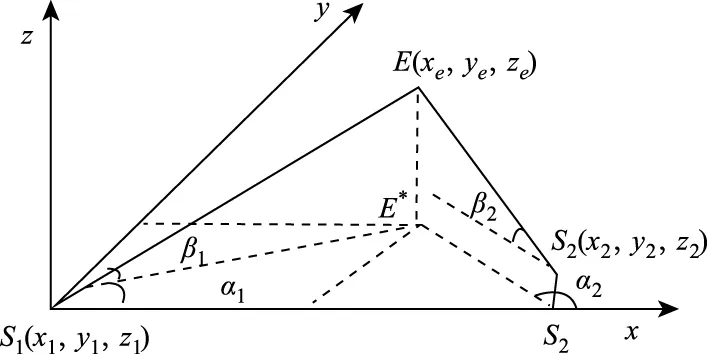
图1 双站交汇测距原理图Fig.1 Schematic diagram of two-station intersection ranging
由图1中的几何关系可得[3]:
(1)
则目标在直角坐标系中的位置E(xe,ye,ze)由下式给出:
其中:
(3)
可见,两站点同时测出目标的方位角和俯仰角,便可得到目标的距离信息。
设红外跟踪系统位置测量、角度测量之间相互独立,根据测量误差理论,可推导出xe,ye和ze定位误差的方差为:

(4)
(5)

(6)
其中,
Δk=k2-k1
(7)
(8)
(9)
定位误差与目标相对于红外跟踪系统的几何关系是密切相关的,GDOP能够将各红外跟踪系统与目标间的相对几何位置同定位精度联系在一起,反映出目标相对几何位置与测量误差的对应关系,并能够准确衡量前者对后者的影响程度[10]。当观测误差增大时,定位误差值也随之增大,GDOP的大小与站点和目标的相对位置有关,还与站址误差和测向误差有关。
根据红外跟踪系统各观测站的站间距离和测角精度,以及目标相对于各站点的位置和角度,可以获取到在该位置的GDOP,表达式为:
(10)
其中,σx2、σy2、σz2分别表示x、y、z方向的定位误差均方差。
在交汇测距模型方程中,假设只考虑x、y方向的定位误差,则定位误差只与α1,α2相关,与β1,β2无关。设两站距离为L,两站点(xa,ya)、(xb,yb)的坐标分别为(-L/2,0)、(L/2,0),对x,y求全微分可以得到:
(11)

(12)
得到:
(13)
3 仿真计算
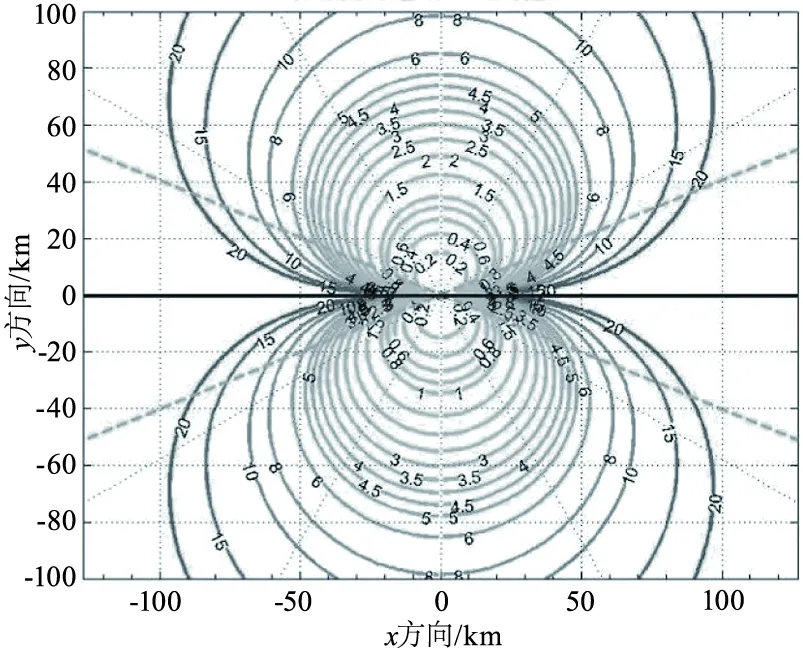
依据上述分析,对红外跟踪系统测距精度与角度测量误差之间的关系进行仿真,仿真条件:双站定位时站点坐标分别为S1(0,0,0),S2(300,0,0)。站间基线距离为300 m,站址测量误差1 m,仿真测距范围X方向为-100 km~100 km,Y方向为-100 km~100 km。方位测角误差依次设置为0.01°、0.015°、0.02°和0.03°。
图2给出了上述条件下XY平面不同位置处的绝对测距误差仿真结果,曲线为不同位置对应的绝对测距误差(单位为km),横纵坐标均为距离。
(a)方位测角误差0.01°
4 结果分析
从图中仿真结果可以得出如下结论:
(1)测距误差随方位测角误差增大而增大,表明双站交汇测距误差与红外跟踪系统自身的测角精度密切相关。
(2)在固定方位测角误差的条件下,相同距离处的测距误差随着方位角从0°~180°变化而先减小后增大,两站连线垂直方向(90°方向)测距误差最小,随着方位角向该方向两侧偏离,测距误差逐渐增大。表明双站交汇测距误差与红外跟踪系统和目标之间的位置关系密切相关。
(3)在固定方位角的条件下,随着距离的增加,测距误差逐渐增大。表明双站交汇测距误差与红外跟踪系统和目标之间的距离密切相关。
图3给出了方位测角误差为0.015°,方位角20°、50°、90°条件下,相对测距误差仿真结果。从图中可以看出,在方位角20°条件下,5 km~60 km范围测距误差在1.5 %~24 %之间线性增加;在方位角50°条件下,5 km~60 km范围测距误差在1.3 %~16 %之间线性增加;在方位角90°条件下,5 km~60 km范围红外跟踪系统测距误差在1 %~8 %之间线性增加。这说明双站交汇测距在远距离、小角度条件下由于测距误差过大而无法有效应用。随着方位角的增大或测距距离的减小,基本上可以保证达到相对较小的测距误差,此时具备较强的实用性。
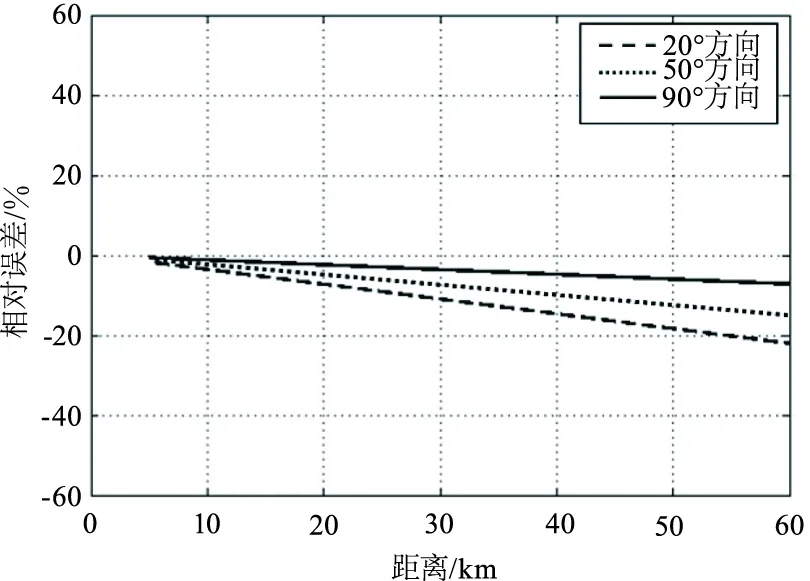
图3 固定方向的相对测距误差仿真结果Fig.3 Simulation results of relative ranging error in fixed direction
5 结 语
文中采用GDOP作为交汇测距精度评价指标,对红外跟踪系统测距精度进行了仿真,得到了不同条件下绝对测距误差。双站交汇测距误差与红外跟踪系统自身的测角精度、目标位置、目标距离密切相关。在工程实现中要保证双站交汇定位精度,一方面要提高系统定向、指北、调平等精度;另一方面要对站点进行合理布局,在增大基线,尽可能选取接近90°方向的目标与双站基线夹角条件下,具备较强的实用性。文中仿真结果对红外跟踪系统双站交汇定位技术的实现和改进具有一定的参考价值。
