基于Arduino的智能勘探车的设计
2022-11-11刘志君
刘志君,席 文
(辽宁科技学院 电气与信息工程学院,辽宁 本溪 117004)
随着科技的发展,为了满足科学研究在灾害中起重大作用的需求,研究设计并开发一台用于在发生地震、火灾、矿难等灾害中可以通过远程遥控和自动行驶等方式同时进行环境勘探和自动排障的新型智能小车,并可以实现上位机的通信功能。
1 智能勘探车的整体方案设计
智能勘探车系统由两部分组成:(1)由Labview编写的上位机系统,控制小车机器臂的动作和显示小车的实时位置和现场照片;(2)由Arduino IDE编写的下位机系统,下位机系统通过蓝牙模块和上位机系统建立通信。下位机系统以Arduino作为控制器,外围电路由四部分组成:一是通过L298N对仿生机械臂的控制;二是包括温湿度传感器DHT11和用于人体感应的红外释电传感器HC-SR501的检测电路;三是基于蓝牙模块的无线通信电路;四是基于超声波传感器的循迹和避障功能。设计框图如图1所示。
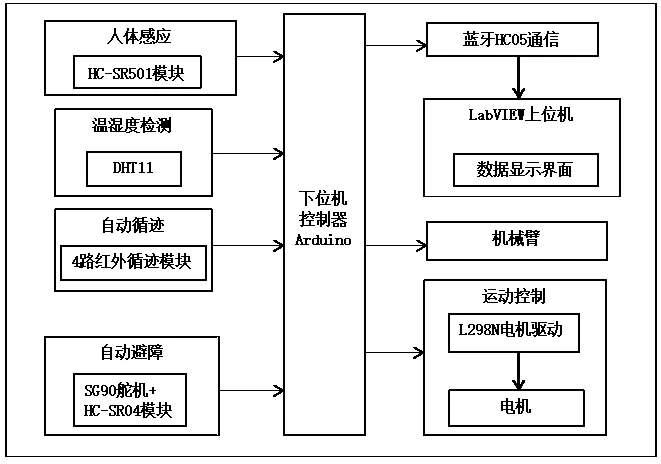
图1 系统设计框图
2 系统硬件电路的设计
本设计考虑到勘探车的应用环境比较特殊,车体采用不锈钢板设计,控制器采用Arduino作为主控制器,通过蓝牙模块进行通信,实现现场数据的上传和对勘探车的控制。
2.1 智能勘探车驱动电路设计
由于单片机输出电流较小,无法直接驱动电机,因此需要使用L298N进行电机驱动。L298N由 4个三极管组成H桥电路,可驱动两台两相电机,输入信号由单片机的I/O口直接给出。L298N模块共设有6个引脚分别为ENA、ENB、IN1、IN2、IN3 和 IN4,可以通过6个引脚控制直流电机的转动方向和转动速度[1]。引脚连接如图2所示。

图2 L298N与Arduino 连接电路图
2.2 避障模块硬件设计
避障模块设计采用一个 HC-SR04超声波避障模块和一个SG90舵机拼装在一起,将其用固定螺丝安装在小车车身的正前端,以便于超声波传感器可以对小车的前、左和右三个方位的障碍物进行探测实现灵活避障。超声波传感器有4个引脚,分别为电源管脚(VCC)、接地管脚(GND)、发射管脚TRIG和接收管脚ECHO。VCC 、GND 、TRIG 、ECHO引脚通过杜邦线连接至控制板上的URF01端口,如图3所示。

图3 超声波避障模块硬件连接图
2.3 人体感应模块硬件设计
HC-SR501模块上具有两个黄色可以手动调整的旋钮,调节距离的电位器可以进行顺时针方向或者逆时针方向旋转,能够分别增大和减小传感器的感应距离,最高可增大到七米左右,反之则可减小至三米左右。调节延时的电位器顺时针方向旋转,感应延时可加长至三百秒左右,反之逆时针方向旋转,感应延时则可以缩短至零点五秒左右。在安装时将其固定在小车车身的前端,保证行驶过程中能够正常检测前方是否有人。红外热释传感器模块具有3个引脚,除了电源线(VCC)和地线(GND)外还有高低电平输出引脚(OUT),高低电平输出引脚通过杜邦线连接至主控制板上的19号数字端口即A0端口[2]。如图4所示。
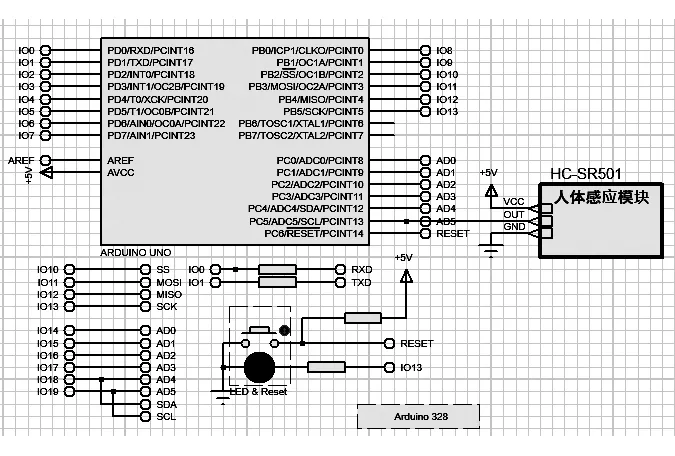
图4 人体感应模块硬件连线图
2.4 循迹模块硬件设计
循迹模块采用的是红外反射传感器TCRT5000,当检测到黑线时,模块输出为高电平,二极管灯灭,未检测黑线,模块输出低电平,二极管灯灭,电路如图5所示。
2.5 无线通信硬件设计
无线通信模块选择的是HC-06蓝牙模块,该模块上共有4个管脚,分别为电源管脚(VCC)、接地管脚(GND)、数据发送管脚(TXD)和数据接收管脚(RXD), HC-06蓝牙模块在通电后会自动转换为AT 模式,然后使用USB 转TTL 连接到电脑[3]。利用计算机上的串口调试软件对名称和传输的波特率等相关参数进行设置,通过蓝牙传输数据使得远程控制勘探小车十分便捷。电路如图6所示。
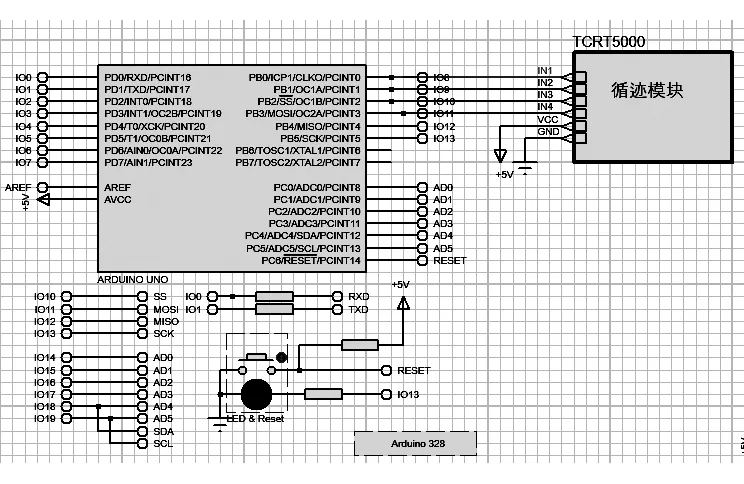
图5 循迹模块硬件连线图
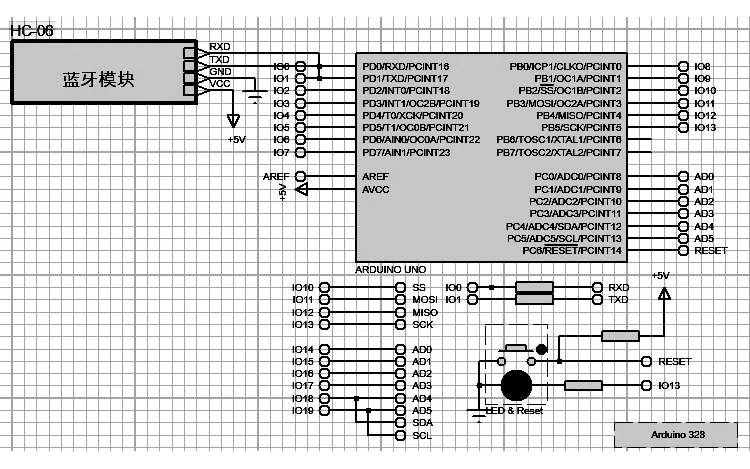
图6 蓝牙模块的硬件连线图
3 仿生机械手的控制
智能勘探车不仅要控制车的行进路线,也要对控制障碍物的抓取进行控制,因此对机械手的控制尤为重要。本设计采用传感器MPU-6050和单片机进行串口通信,用来检测机械手的动作,单片机读取传感器存储器中角速度,加速度的数值,进行X轴、Y轴角度的转换[4]。数据采集流程如图7所示。

图7 数据采集流程图
4 系统检测
为了验证系统的合理性和可行性,在实验室进行了多次的运行试验。现场的运行数据表明,可以实现智能勘测小车的智能行驶和自动避障及通过APP远程控制小车运动和障碍物抓取等功能,并且可以实现 Labview上位机对勘探车环境的温湿度及生物体的远程监测显示。进行温湿度测试监视器每隔一秒读取温度显示为温度24度,湿度33%,当进行吹气检测后,监视器温度显示33度~35度变化,湿度是37%~42%变化。通电一秒后, HC-SR501模块初始化完成开始工作,当HC-SR501模块的感应范围内有人经过时,HC-SR501模块的OUT端输出高电平,在串口监视器的显示界面上显示“有人”。上位机测试如图8所示。当小车在轨道上正常运动的时候,若小车的正前方有强光照射或者光强度过高时,会造成TCRT5000红外传感器对于黑色轨道的识别不灵敏,则会导致小车不能正常修正运动路线,从而偏移轨道。综上,可以在小车的前端下部安装一个具有遮挡强光功能的半透明挡板,以便于减小强光对TCRT5000红外传感器感应造成的影响。
5 结语
文章主要设计并研究出了一款基于 LabVIEW和Arduino的可以进行远程勘探和避障的小车。阐述了系统软硬件结合的制作过程,通过多个不同的传感器联合重点解决了勘探小车在行驶过程中遇到小型障碍物时,小车可以自动躲避或通过远程控制系统人工辅助排除障碍等关键性的问题,勘探小车达到了可以排障的目的。多次实验数据表明,小车拥有良好的排障及环境信息采集能力,可以被应用到实际生活中。
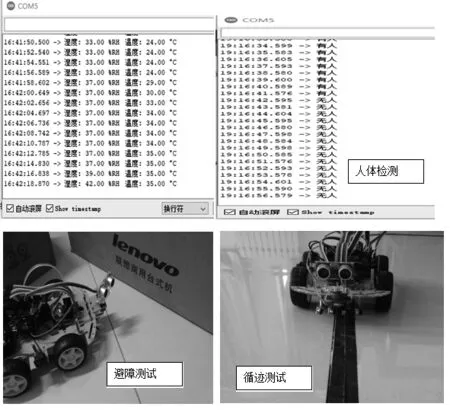
图8 功能测试示意图