基于磁惯性测量的分段式井眼轨迹测算方法
2022-11-11杨金显刘鹏威
杨金显,刘鹏威
(河南理工大学 电气工程与自动化学院,河南 焦作 454000)
随着石油钻井和油气勘探技术的不断发展,工程中对井眼轨迹精确度的要求也不断提高。由于外界环境的影响,工程实际轨迹常常偏离设定轨迹,这就需要进行实时测量,拟合出真实的轨迹曲线[1-2],进而调整方位。由于测斜时只能获得一系列离散测点处的井深、井斜角、方位角等基本参数,无法还原各测段内井眼轨迹,因此需要基于假设条件和数学模型来计算井眼轨迹的空间坐标、弯曲及扭转形态等参数[3-4]。
众多研究人员将研究重点放在井眼轨迹形态理论上,他们将测段或者整个井段假设为一种轨迹模型,例如圆柱螺线法的轨迹模型、自然参数曲线的轨迹模型、空间圆弧的井眼轨迹模性[5-7]等。文献[8]在等变圆柱螺线轨迹模型的基础上提出了非等变圆柱螺线的井眼轨迹模型,以求更好地适应井眼轨迹的变化。上述轨迹的计算方法均假设测段为单一的井眼轨迹模型,但是在实际的钻进过程中,实际的井眼轨迹不可能总与设计的轨迹模型完全吻合,因此单一的轨迹模型会使井眼轨迹的计算产生较大的模型误差[9-10]。
文献[10~14]对不同的井眼轨迹模型,例如自然曲线模型[10]、最小曲率模型[11]、圆柱螺线模型[12]使用数值积分法进行分析,并推导出对应模型的数值积分计算式。这种方法在一定程度上提高了井眼轨迹的计算精度,但是计算过程存在假设的模型误差。文献[14]提出将测段平均分为多条直线段,再对各直线段进行特殊积分来计算井眼轨迹。这种方法虽然对轨迹中间进行分段,但是分段方式存在较大的主观性。
上述轨迹计算方法采用单一轨迹模型求取井眼轨迹,获得的结果精度较低,轨迹分段的主观性较大。针对这些问题,本文提出了基于磁惯性测量的分段式井眼轨迹测算方法。本文在分析不同井眼轨迹模型的基础上构造了统一的测点参数反推表达式,进而设计了基于磁惯性测量的井眼轨迹分段式测算方法。该方法首先对井眼轨迹进行一次轨迹模型识别,在一次轨迹模型约束下生成分测点,再通过磁惯性测量数据对分测点数据进行校正;然后,根据分测点的井斜角和方位角变化率对井眼轨迹进行自适应分段,再对分段后的井眼轨迹进行模型识别,并根据分段识别的井眼轨迹模型对轨迹进行计算,最终获得井眼轨迹的坐标增量。算法流程如图1所示。
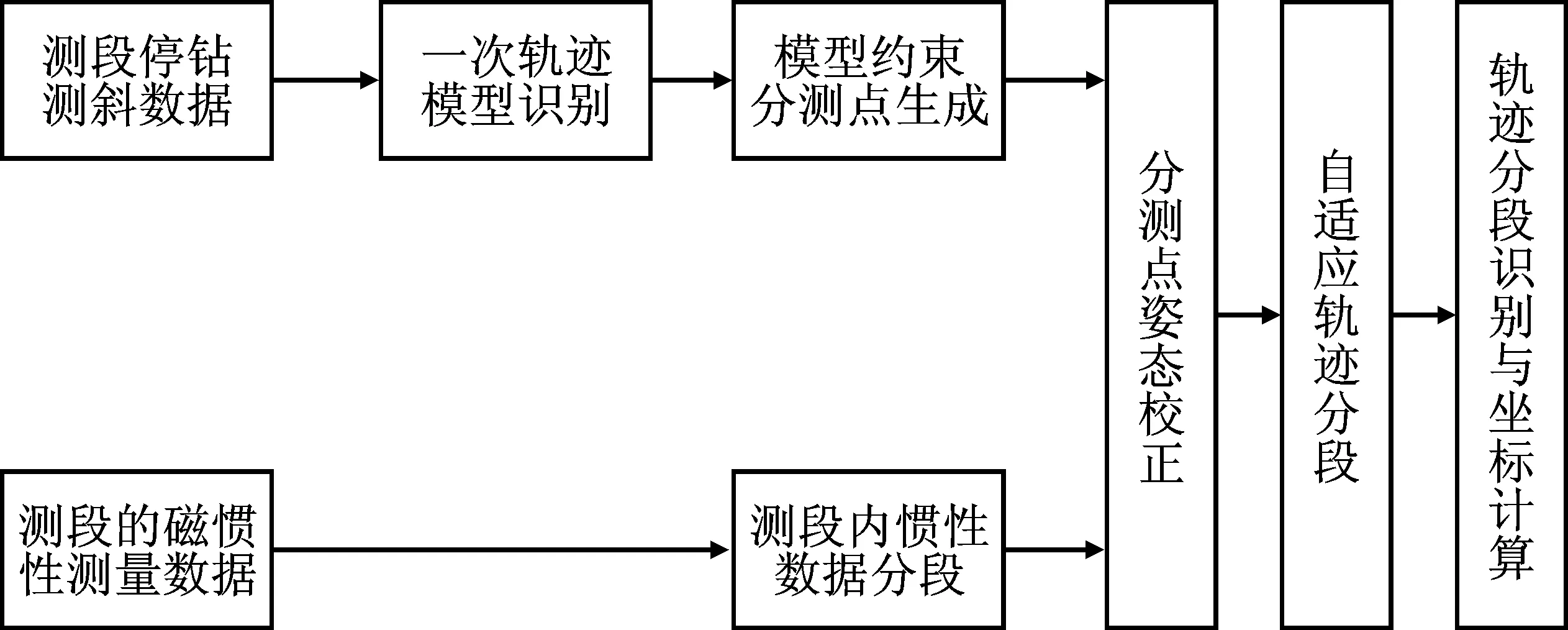
图1 磁惯性辅助井眼轨迹分段计算方法流程图
1 磁惯性测量原理
为求取井眼轨迹,需要根据测量数据求出不同测量点的井斜角、方位角。目前,最常用的方法是通过加速度计和磁强计的测量数据,由姿态转换矩阵推导出井斜角和方位角[15-19]。
当钻具稳定或者静止时,加速计的输出与姿态转换阵的关系为
(1)

同理,磁强计的输出与姿态转换阵的关系为
(2)
式中,mx、my、mz为磁强计测量值;当地磁场强度为m0;地磁方向与磁北方向的磁倾角夹角为β。
根据式(1)、式(2)和姿态转换矩阵,可求出井斜角和α方位角φ的表达式。
(3)
(4)
2 井眼轨迹模型与分测点参数反推公式
井眼轨迹模型的识别过程需要求取测段内井眼轨迹模型的挠曲参数。不同井眼模型的井斜角、井斜变化率和方位变化率等挠曲参数的计算方法不同,因此必须对不同模型中井斜角、方位角的反推计算式进行统一化表示,才能对不同井眼轨迹模型使用统一的方法表示。
2.1 常用轨迹模型
2.1.1 自然参数模型
自然参数模型的特征参数是井斜变化率和方位角变化率。井斜变化率和方位角变化率分别保持为常数,井斜角和方位角呈线性变化[5]。
井斜变化率kα和方位角变化率kφ的表达式记为
(5)
(6)
式中,αi、φi、Li分别表示i测段的井斜角、方位角和井深,则有
α=αi-1+kαΔL
(7)
φ=φi-1+kφΔL
(8)
ΔL=Li-Li-1
(9)
工具面角ω的预测表达式如式(10)所示。
(10)
2.1.2 空间圆弧模型
井眼轨迹的空间圆弧模型假设井眼轨迹为空间斜平面内的圆弧线[6]。该模型的特征参数为井眼曲率和初始工具面角
(11)
(12)
式中,Ki,i-1为第i测段的弯曲角的变化率;εi,i-1表示测段的弯曲角[16~17];ωi-1为测段的初始工具面角,即测段的上一测点的工具面角。
根据上式,可进一步求得该模型下井深L处的井斜角α、方位角φ和工具面角ω,如式(13)~式(15)所示。
cosα=cosαi-1cos-sinαi-1cosωi-1sin(kεΔL)
(13)

(14)
(15)
2.1.3 圆柱螺线模型
圆柱螺线模型假设井眼轨迹在垂直剖面图和水平投影图上均为圆弧,其特征参数是井眼轨迹在垂直剖面和水平投影图上的曲率,分别记为
(16)
(17)
进而求得井深L处的井斜角、方位角和预测工具面角。
α=αi-1+kvΔL
(18)
(19)
(20)
2.2 分测点参数反推公式
将井眼轨迹测量中井斜角和方位角用向量表示,称为测点向量,即x=[α,φ]T。不同轨迹模型的计算式统一表示为
(21)
(22)
式中,fM,α和fM,φ分别表示对应模型井斜角和方位角的反推函数关系式。将式(21)和式(22)写成测点向量的表达式,如式(23)、式(24)所示。
(23)
ω=fω(x,xi-1)
(24)
3 分测点参数校正
3.1 一次轨迹模型约束
钻进环境对井眼轨迹测量有一定的影响,使得实际井眼轨迹与设计的井眼轨迹无法完全吻合。工程中采用工具面角识别法对轨迹模型进行识别,即通过测段端点的计算工具面角与测量的工具面角的差异程度,间接地表示对应模型的差异度。本文将仅使用测段两端点的井眼轨迹模型识别的过程称为一次井眼轨迹模型识别。由于一次井眼轨迹模型识别忽略了测段中间点的信息,因此轨迹模型与实际的轨迹存在误差。本文采用工具面角间接表示该误差,并将其称为对应模型差异度,用difCM表示,单位为(°)·m-1,表示对应模型在该测段上每米的平均误差度数。
设井眼轨迹有n个测段,那么对井眼轨迹模型识别参数定义为
(25)
式中,ϒ为钻具测量的工具面角;ω为对应模型的理论工具面角;Lj,0和Lj,1分别为第j测段中的上测点井深和下测点井深,二者之差为测段的井深变化量。
3.2 一次轨迹模型约束的分测点
根据磁惯性测量数据中的井深变化量,将测段分成n个不完全相同的分测段,用ΔLk表示,其中k=1,2,3,…,n。将井深变化量代入式(24)中,可以求得井深Lk对应分测点的井斜角和方位角
x′k=fα,φ(xk-1,ΔLk)
(26)
式中,x′=[α′,φ′]T,表示一次轨迹模型约束下分测点的井斜角和方位角的向量。为了清晰地表示井斜角和方位角的反推过程,将其标量形式表示为如下计算式。
α′k=fM,α(αk-1,φk-1,ΔLk)
(27)
φ′k=fM,φ(αk-1,φk-1,ΔLk)
(28)
3.3 分测点校正估计
本文根据磁惯性测量数据中的井深变化量和基于一次识别的轨迹模型的约束求取井眼轨迹的分测点。在对一次识别的轨迹模型进行计算时,并未考虑测段内轨迹的实际情况,因此一次轨迹约束的分测点向量包含井眼轨迹模型误差和井深变化量的随机误差。将井眼轨迹的磁惯性数据与分测点数据相结合可以估计出精确的分测点数据。
由于钻具在钻进过程中具有惯性,即钻具的方位和倾角都是一个渐变的过程,因此测段中相邻的两个分测点的模型误差近似为相同,则可以通过第k个分测点的估计向量与k个分测点的一次轨迹约束向量之间的误差来表示第k+1个分测点的误差。
第k个分测点的估计向量与一次轨迹约束向量之间的误差用e′x,k表示。
(29)
通过以上描述,分测点向量与真实分测点向量之间的关系可以表示成
(30)
式中,wk为井深变化量的随机误差噪声,为高斯白噪声,wk~N(0,Ek)。
3.3.1 系统的状态空间表达式
根据上述描述建立分测点向量的状态空间表达式
(31)
式中,Fk为系统矩阵;Bk为输入矩阵;e′x,k为系统的粗模型误差;wk-1为误差的噪声向量,wk-1~N(0,Ek-1);vk为量测噪声,vk~N(0,Qk)。
3.3.2 分测点的卡尔曼滤波校正
时间更新过程即为分测点求取过程和初步校正的过程,其中初步校正是对分测点向量去除模型误差的过程。

(32)
初步校正过程是对一次轨迹模型约束的分测点的轨迹模型误差进行校正的过程,即
(33)
通过上述关系式,可以推导出分测点向量先验估计的协方差为式(34)。
(34)
量测更新的过程即磁惯性测量数据对分测点数据进行校正的过程。磁惯性测量数据是由磁惯性测量随钻测量系统测得的地磁信息和重力信息。通过姿态解算的方法得到分测点对应井深的测点数据,用zk表示。
第k个分测点的测量值的新息为
(35)
其中,新息ezk表示磁惯性测量数据与先验分测点数据之间的误差量。
第k个分测点的量测更新过程为
(36)
(37)
(38)

4 井眼轨迹分段计算
实际井眼轨迹为一条空间曲线,可以通过空间的曲线和直线组合来表示。为了减少计算量和模型的选择过程,设置井斜角和方位角的角度变化界限值(Boundary of Angle Change)分别为boaα和boaβ。当相邻两分测段中井斜角变化率或方位角的变化率之差的绝对值超过对应模型允许的界限值时,测段的轨迹模型发生改变。
(39)
式中,kα,k-1和kα,k分别为相邻两分测段的前后分测段井斜角变化率;kφ,k-1和kφ,k分别为相邻两分测段的前后方位角变化率。
将超限的测点作为分段的分界点进行分段,并对分测段通过工具面角模型识别法进行轨迹模型识别。然后,根据识别结果,按照井眼轨道技术标准中[21]对应轨迹模型增量的计算方法进行计算。
5 实验与算法验证
模拟钻井实验通过随钻测量样机设备进行实验。随钻测量样机中,采用由IMU(Inertial Measurement Unit)与磁强计组合的测量单元采集钻井数据。测量单元如图2所示,包含IMU、磁强计、供电单元以及处理器。
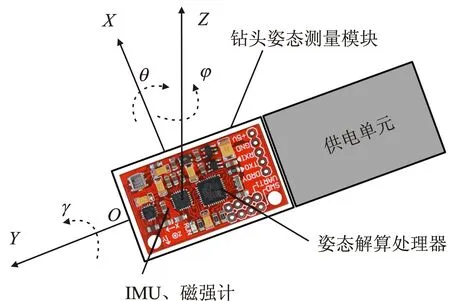
图2 随钻测量单元
为了能够清楚地描述实验结果,将钻井样机与实际钻井设备对比,并将采集数据中的井深与坐标增量进行1∶18的比例尺换算。随钻测量样机设备采样频率为1 s,在钻进的过程中采集角速度、加速度及地磁数据。为模拟实际钻井过程中的停钻状态,样机设备每隔约100 s停钻,此时可采集静态测量数据。
实验时,将样机设备按照设计的轨迹方向钻进20 m的井深,并进行一定的避障操作,即增降斜或增减方位操作。样机钻进的20 m井深对应360 m的实际井深(下文中直接以比例尺变换的实际井深为参考数据),期间进行13次停钻操作。本文选取钻进过程中100~180 m的测段进行算法分析。
算法验证分为两部分进行:(1)算法的实例分析。以测段的部分数据为例,用数据表格的方式验证本文算法;(2)轨迹图分析。将测段的数据带入本文算法,以轨迹图的形式进行分析。
5.1 算法实例分析
5.1.1 一次井眼轨迹模型识别
首先将测段中井斜角、方位角和井深带入计算式中求取井眼轨迹模型,计算每个模型对应下的工具面角,计算结果如表1所示。本文用a、b、c表示自然参数模型、圆柱螺线模型和空间圆弧模型对应的计算工具面角。

表1 一次井眼轨迹模型识别
将计算工具面角和测量工具面角代入对应模型差异程度的计算式中,计算每个模型的差异度。经过计算,自然参数模型差异度为0.267°·m-1,圆柱螺线模型差异度为0.903°·m-1,空间圆弧模型差异度为1.482°·m-1,因此取自然参数模型为一次井眼轨迹模型。
5.1.2 分测点生成与校正
对测段的模型差异度进行计算,如表2所示。从表2中可以看出,对应自然参数模型的测段模型差异度中,井深为145~160 m测段的差异度较大,因此在实例分析中,仅对该测段进行分析。
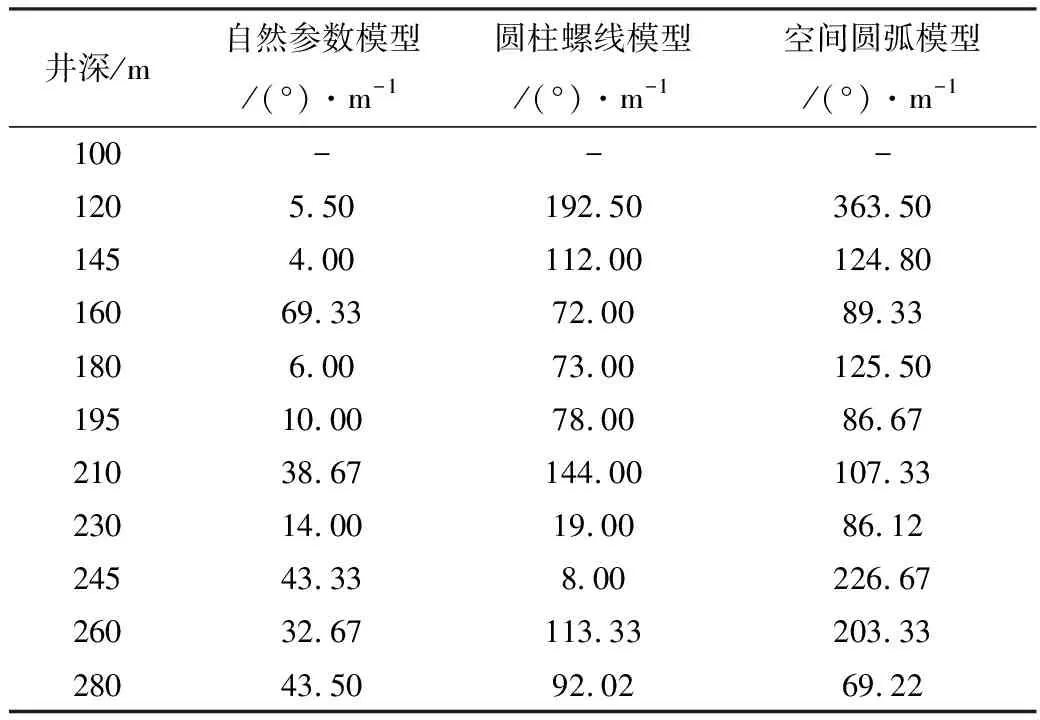
表2 测段模型差异度
由前文可知,在一次井眼轨迹识别中确定的一次估计模型为自然参数模型,故在此模型的约束下,根据惯性测量单元中采样的井深变化量生成分测点(井深变化量为0.3~0.6 m,这里为了减少表格的篇幅,仅将其中的关键点呈现在表格中),并通过磁惯性解算的参数校正分测点参数,校正结果如表3所示。将表3中校正后分测点数据带入式(35)中,可以发现在井深为152.0 m处,方位角变化率差值大于该段的模型差异度。从表3的数据中也可以看出,在152.0 m的井深位置,方位角由增大变为减小,因此判断井眼轨迹模型在此处发生变化,表中*表示分测点对应井深。
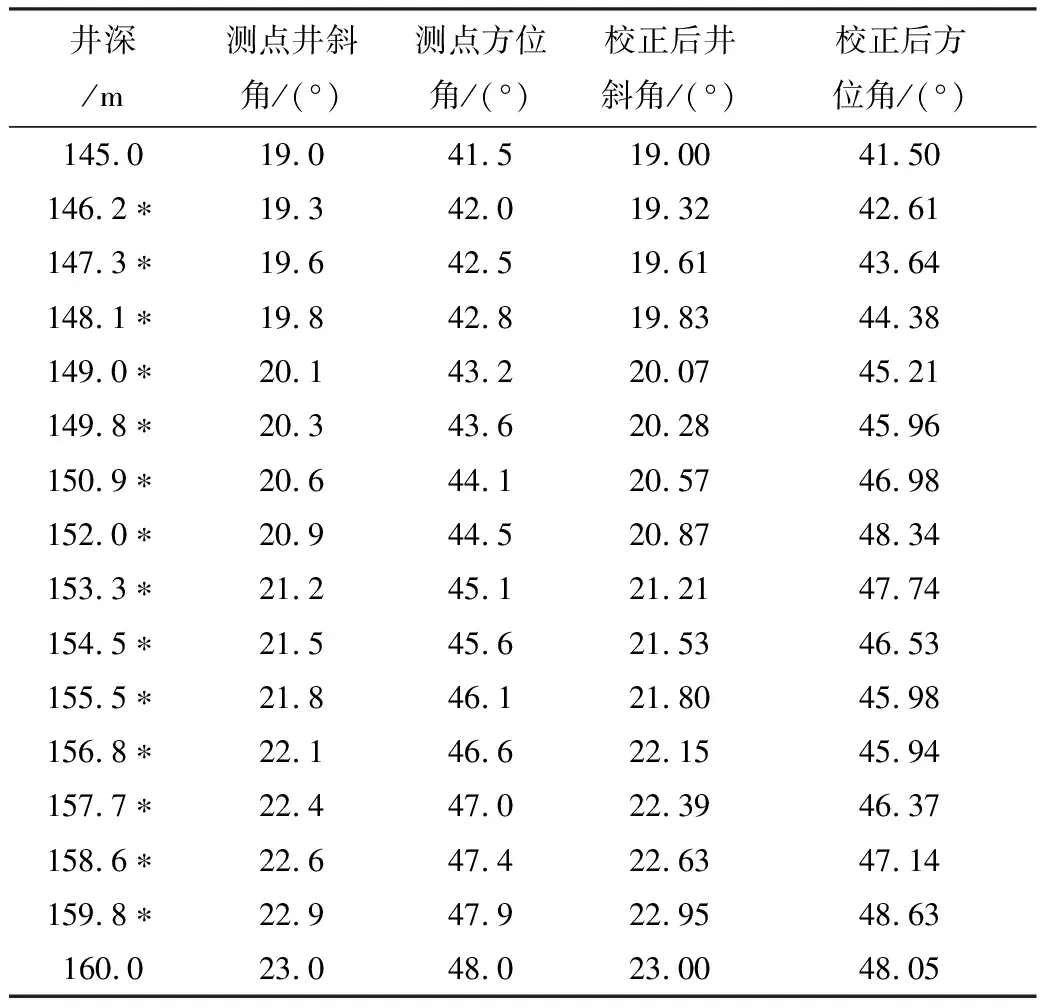
表3 145~160 m测段的分测点校正数据
5.1.3 轨迹分段模型识别
根据校正后的井斜角和方位角计算各段对应模型下的工具面角,分别用a、b、c表示,计算结果如表4所示,空间圆弧模型中第一个分测点的工具面角为给出值。
将表4中工具面角的测量值与轨迹模型的工具面角的计算值代入式(22),求取各分测段3模型差异度a1、b1、c1以及分测段的累积模型差异度a2、b2、c2,计算结果如表5所示。

表4 分测点工具面角计算
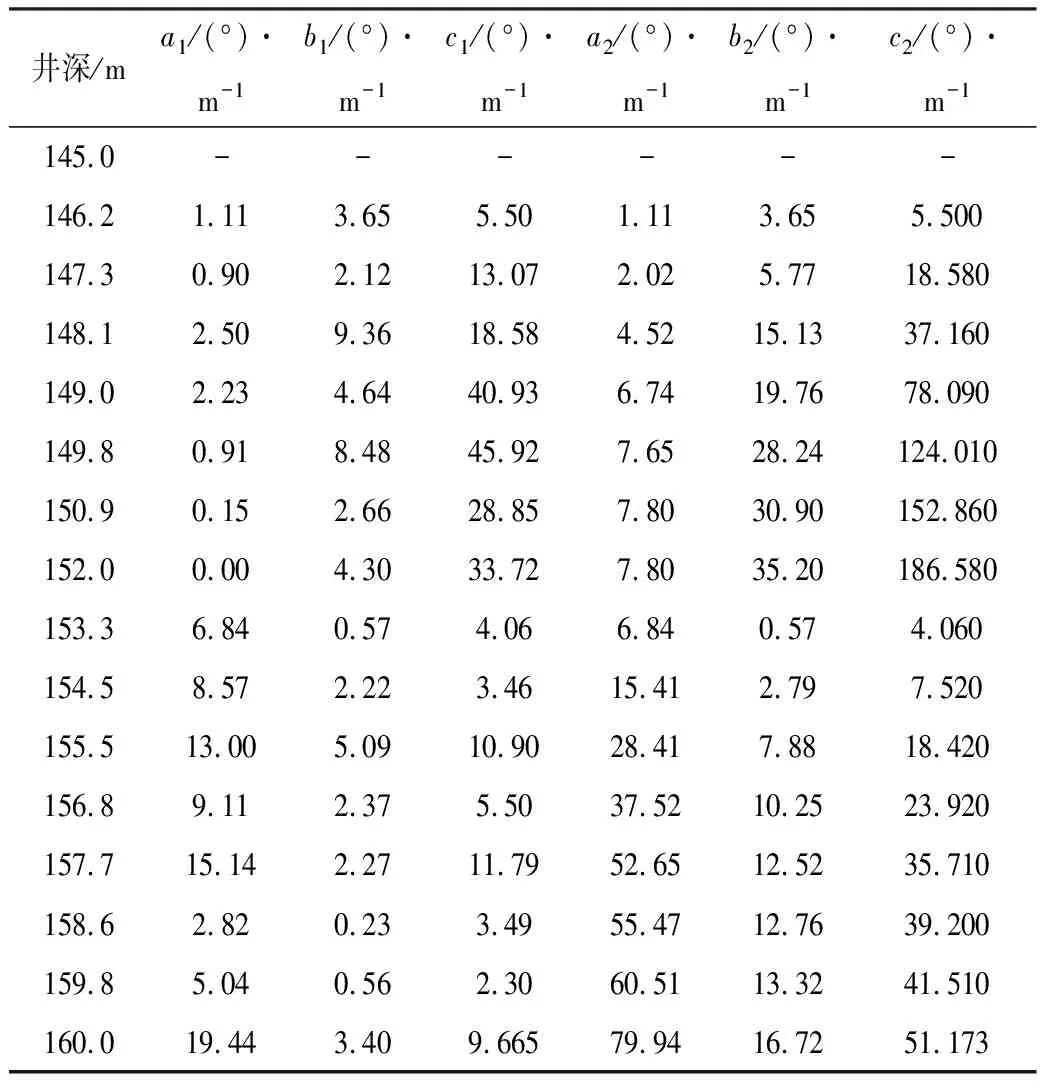
表5 测段的模型差异度
从表5中可以看出,在井深152.0 m处测段的模型差异度和分测段累积模型差异度发生了明显的变化,证明本文提出的分段方式是正确的。从分测段累积的模型差异度可以看出,井深为145.0~152.0 m的测段的井眼轨迹模型为自然参数模型,而井深为152.0~160.0 m的测段的井眼轨迹模型为圆柱螺线模型。
5.1.4 轨迹误差分析
不同算法的坐标增量计算结果如表6所示。表6中数据参考值为测井设备在钻井之后进行测量的数据。绝对误差是指北、东、地坐标增量与数据参考值之差的平方和的平方根。

表6 轨迹计算结果
通过分析表6数据可得,与单一轨迹模型算法相比,本文算法的坐标增量计算结果精度较高,绝对误差从单一模型算法的0.840 m降低至0.146 m,表明对轨迹分段进行不同轨迹模型的计算能够提高轨迹计算的精度。
5.2 轨迹图分析
为进一步证明本文算法的有效性,将井深为100~280 m的测段进行本文的磁惯性分段式轨迹计算。图3为井深100~280 m的井眼轨迹的水平面投影图,可通过该图观察到井眼轨迹的方位走势,以及不同分测点方位角的变化趋势。

图3 井眼轨迹的水平面投影图
从图3可以看出,经过校正后的分测点轨迹更加接近理想轨迹,减小了轨迹计算误差,避免了一次轨迹模型估计轨迹的局限性。经过自适应调整轨迹模型后的计算精度更高。
图4为井深100~180 m的井眼轨迹的垂直面投影图,能够通过该图观察到井眼轨迹的井斜走势,以及分测点井斜角变化趋势。虽然在E轴投影坐标5~15 m处时,采用本文所提方法进行估计的精度较低,但整体上,所提方法的估计精度均高于一次轨迹模型。

图4 井眼轨迹的垂直面投影图
综合图3和图4可知,在井深100~180 m的测段中,井斜角变化比较明显。校正后分测点所形成的轨迹明显更加接近参考轨迹,降低了一次轨迹模型估计的误差,说明采用分段式不同模型的计算方法有效提高了井眼轨迹的精确度,证明该方法是可行的,也为工程应用提供了理论基础。
6 结束语
针对井眼轨迹形态测算中使用轨迹模型单一和反推测算点精度存在误差的问题,本文提出基于磁惯性测量的分段式井眼轨迹测量算法。本文首先在分析不同井眼轨迹模型的基础上构造了统一的测点参数反推表达式,并设计了基于磁惯性测量的井眼轨迹的分段式测算方法。通过实例算法分析和轨迹图分析证明了基于磁惯性测量的分段式井眼轨迹计算方法比单一轨迹模型算法的精度高,为实际工程应用提供了理论依据。