一种基于纹理特征分析的地铁隧道裂缝检测方案
2022-11-11张秋元刘志全
张秋元,刘志全
(1.广州南方测绘科技股份有限公司广州分公司 智能精密测量技术部,广东 广州 510663;2.暨南大学 网络空间安全学院,广东 广州 510632)
近年来,我国地铁处于跨越式发展阶段。据《2019年上半年中国内地城轨交通线路概况》显示,截止到2019年6月底,我国已有37座城市投入城轨交通运营,其中运营地铁总长度达到4 656.83 km。地铁隧道裂缝是影响地铁安全的重要因素[1-2],其量化检测对营运地铁的维护和在建地铁的验收都具有重要意义[3]。
当前,裂缝检测主要依赖于传统的人工巡检方式[3-4]。基于图像的裂缝检测技术具有高效、精准、高度智能化等特点,能够克服人工巡检中工作效率低、安全风险高等缺点,正逐渐成为裂缝检测的主流方向[5]。文献[2]在分块图像区域内进行图像预处理,并基于隧道裂缝纹理特征进行裂缝信息提取。文献[6]提取公路路面的点云数据,然后对其进行插值,得到具有地理参照特征的公路路面影像图,并通过迭代张量投票算法提取宽度大于2 cm的裂缝数据。文献[7]提出了一种基于裂缝概率图的裂缝检测方法,将概率生成模型导出的裂缝概率图和支持向量机计算的像素邻域信息概率图融合为多重概率分布图来进行裂缝检测。文献[8]首先对桥梁裂缝图像进行预处理,然后通过卷积神经网络分类模型对裂缝的严重程度进行分类,并根据分类结果建立桥梁结构健康检测系统。文献[9]提出了一种阿拉伯数字方法,首先对隧道表面裂缝图像进行裂缝粗提取,然后通过连通区域标记法和形态学方法实现裂缝的精细化检测。
现有方案的研究对象大多为公路、桥梁和混凝土表面的裂缝图像。与这些图像相比,地铁隧道中的裂缝图像背景复杂、光照不足,其噪声类型和现有方案中已考虑的类型差别也较大,因此直接将现有方案应用于地铁隧道场景时效果不佳。此外,针对地铁隧道场景的现有方案较少,当裂缝图像表面覆盖块状噪声时,存在裂缝漏识别问题。针对以上问题,本文提出了一种基于纹理特征分析的地铁隧道裂缝检测方案。该方案能够高效、准确地检测地铁隧道裂缝信息,并自动标识裂缝区域。此外,当裂缝图像表面覆盖块状噪声时,本文所提方案的检测效果明显优于现有方案。
1 地铁隧道裂缝检测的整体框架
地铁隧道裂缝检测的整体框架如图1所示,其中隧道三维激光扫描系统主要由三维激光扫描仪、工控机、移动小车、加速度计、光纤陀螺仪和里程计组成。在移动小车作业中,三维激光扫描仪螺旋式连续扫描生成海量的地铁隧道空间三维点云数据。三维点云数据经去噪、拼接等处理后,生成地铁隧道三维模型,并同步生成地铁隧道正射影像图。本文以“地铁隧道正射影像图”为原始扫描图像来研究地铁隧道裂缝的自动化检测。
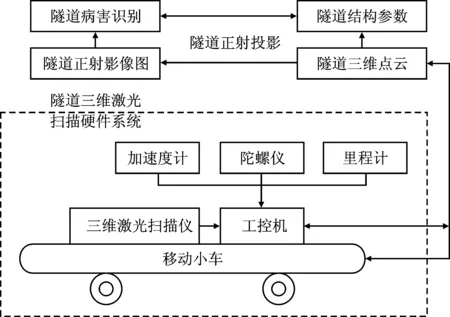
图1 地铁隧道裂缝检测的整体框架
2 地铁隧道裂缝检测算法
针对地铁隧道正射影像图中背景复杂、裂缝灰度与背景灰度高度相似等问题,本文提出了裂缝检测算法的流程图如图2所示。首先对原始扫描图像进行腐蚀、对比度拉伸、加权邻域滤波等预处理以改善图像质量;然后对图像进行分块,并对分块区域采用改进的最大类间方差法[10-11]将裂缝从背景图像中分割出来;接着利用纹理特征分析滤除虚假裂缝信息,再进行图像细化以得到裂缝骨架图像;经裂缝毛刺剔除操作后,即可实现地铁隧道裂缝的自动化检测。
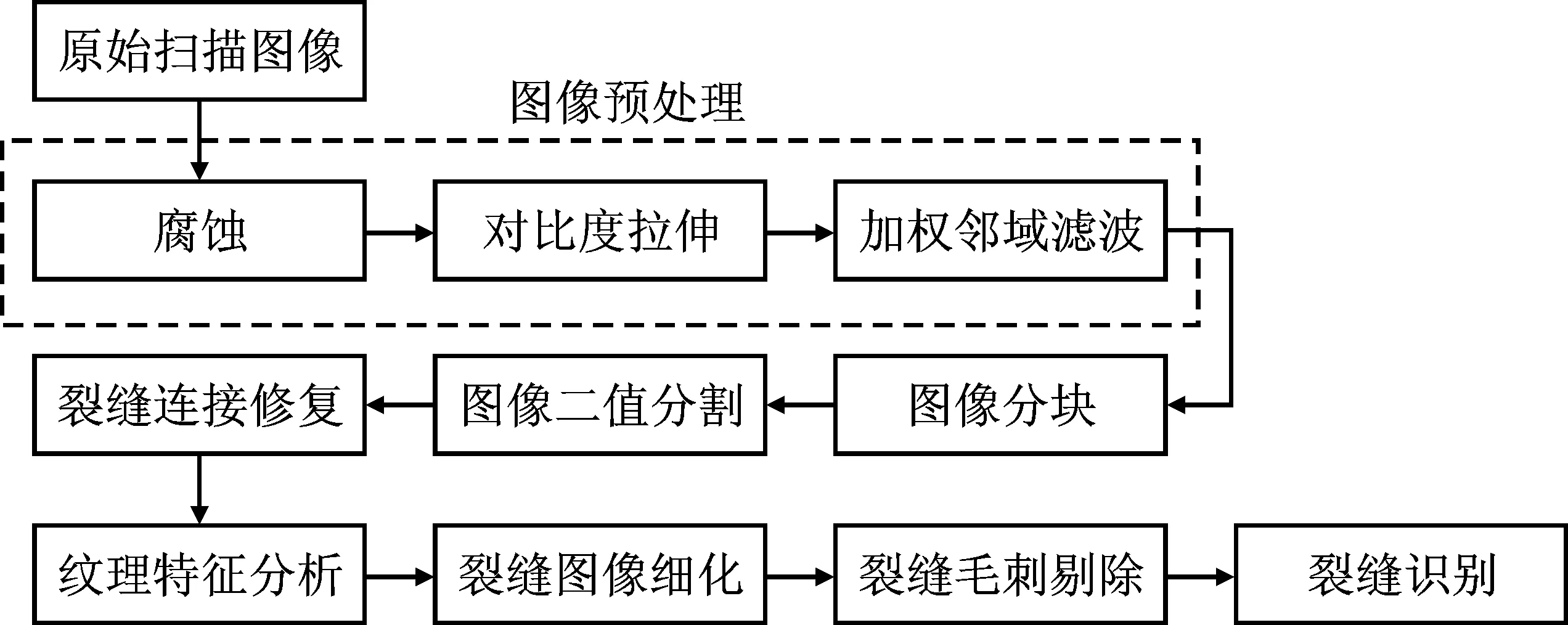
图2 本文裂缝检测算法流程图
2.1 图像预处理
三维激光扫描仪利用目标反射的激光强度,在0~255范围内投影生成隧道正射影像图。该图像丢失了RGB信息,属于灰度图像,图像质量低于工业相机采集的高清隧道影像图。对于隧道正射影像图,采用单种图像增强算法并不能取得满意的效果,因此本文结合多种图像预处理技术(腐蚀、多次限幅拉伸和改进的加权邻域滤波)对原始扫描图像进行预处理。
首先通过腐蚀,在小范围内加深裂缝灰度。相比于高斯滤波和直方图均衡化,腐蚀能够更好地保护图像细节。上述几种算法的处理效果对比如图3所示。
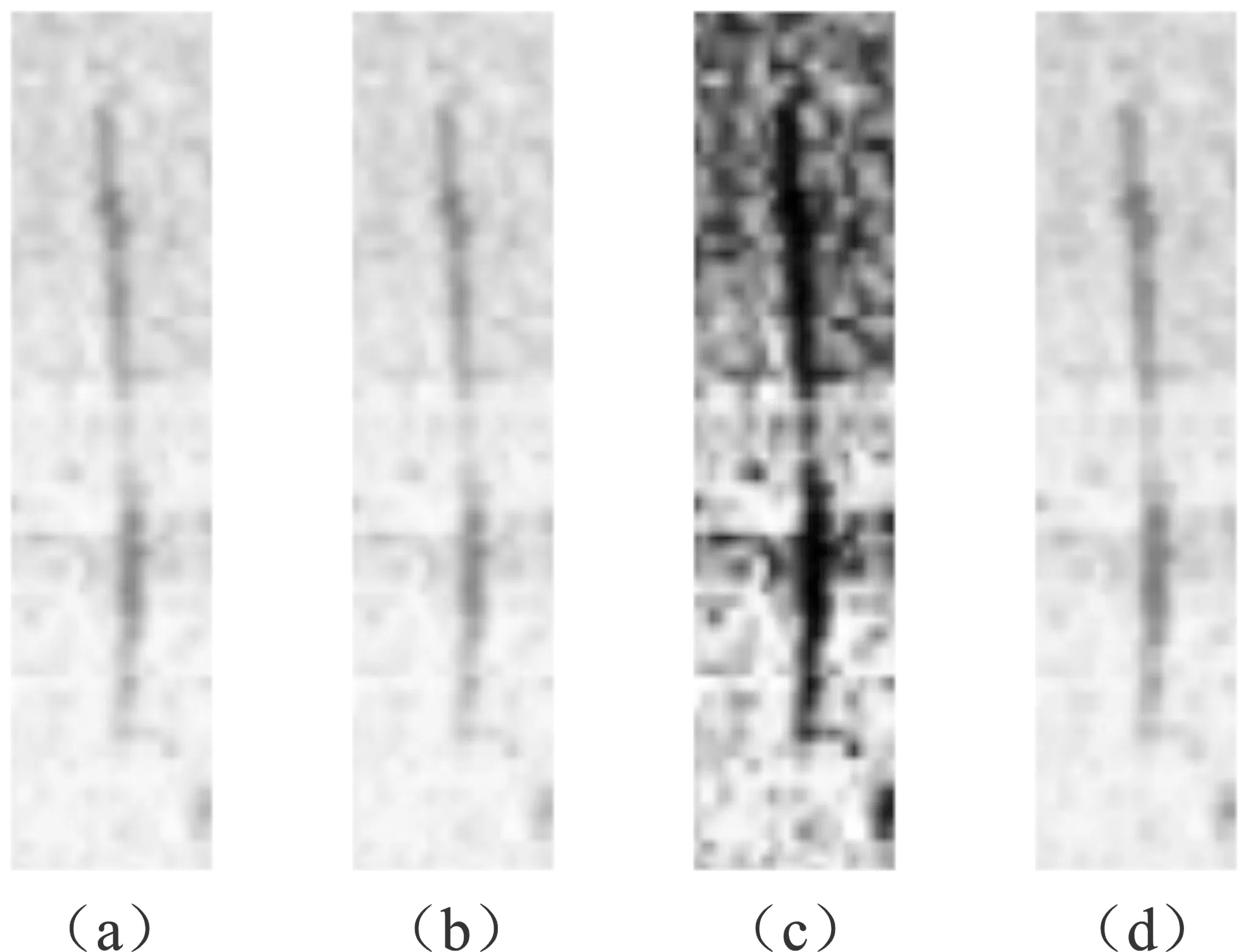
图3 图像增强算法对比
考虑到在地铁隧道正射影像图中的裂缝灰度信息在灰度值一定的范围内波动,为了增强后续图像二值分割的效果,本文摒弃了传统的全域线性拉伸,采用改进的限幅拉伸方法对图像进行对比度拉伸,以便加深裂缝灰度。本文还采用多次限幅拉伸来突出裂缝灰度信息。具体而言,对比度拉伸后的灰度图f(x,y)的计算式为
f(x,y)=
(1)
式中,g(x,y)为对比度拉伸前的灰度图;[gmin,gmax]为对比度拉伸前的灰度区间;[fmin,fmax]为对比度拉伸后的灰度区间。为增强裂缝与背景区域的对比度拉伸效果,本文进行两次重复拉伸。
接着采用改进的平均滤波法对图像进行加权邻域滤波以消除图像的噪声和滤除突变的像素点。与常规均值滤波、中值滤波[12]等传统邻域滤波不同,为了充分利用隧道裂缝走势特征,本文减弱了一定方向上的像素信息,其中卷积核模板W为
(2)
加权邻域滤波后的图像I(x,y)可由式(3)导出。

f(x,y)+f(x+1,y)+f(x,y+1))
(3)
图4(b)展示了多个原始扫描图像在预处理后的实际效果。
2.2 图像二值分割
地铁隧道正射影像图的灰度直方图大多无法呈现明显的双峰特性。地铁隧道正射影像图灰度信息来源于三维激光扫描仪接受目标反射的激光强度,裂缝灰度与周围噪声灰度相似度较高。真实地铁隧道裂缝宽度为毫米级及亚毫米级,在本文2 mm精度的地铁隧道正射影像图上表现为2~5个像素。以上裂缝特征给图像二值分割带来诸多困难。若整个裂缝区域图像直接采用改进的最大类间方差法[10-11],利用一个阈值进行二值分割,将很难达到二值分割的目的。因此,本文将裂缝区域图像分块,采用多个自动化阈值进行二值分割。本文对预处理后的图像I(x,y)进行分块,并将分块区域记为I1(x,y)、I2(x,y)等,分块区域的大小默认为50×50像素,并根据图像尺寸进行微调。然后,对每个分块区域分别采用改进的最大类间方差法[10-11]进行二值分割,再将每个二值分块区域拼接为完整的图像。
最大类间方差法[10-11]将每个分块区域分为目标区域和背景区域两部分,并计算得到最佳阈值ti。由于地铁隧道正射影像图中目标区域和背景区域的灰度值相差不大,为减少背景噪声,本文将ti改进为ti-10,并将其作为每个分块区域二值分割的阈值。每个分块区域二值分割后的图像zi(x,y)可由式(4)导出
(4)
接着将每个zi(x,y)进行拼接以导出二值分割后的完整图像z(x,y)。图4(c)展示了多个原始扫描图像在二值分割后的实际效果。
2.3 纹理特征分析
地铁隧道噪声主要分为3种:(1)点状的离散类噪声,例如粉尘等;(2)块状噪声,例如地铁隧道管片上的螺栓、吊装孔、洇湿等;(3)近似裂缝的虚假噪声,例如水痕、划痕、细长钩状结构等。单一特征的阈值控制无法一次性滤除这3类噪声。本文选取裂缝二值图像连通区域的面积S、周长L、矩形度R、最小外接矩形的长宽较大值M、分散度D、集中度C、圆形度e和二值纹理占有率a等8个特征作为裂缝纹理特征,并为其设置阈值,随后提取符合阈值条件的裂缝纹理。有别于常规面积、周长、矩形度纹理特征参数,本文提出将二值纹理占有率结合7个特征参数来滤除裂缝噪声背景,并忽略裂缝宽度近似值这一限制条件。采用该方法可在提取裂缝纹理的同时,解决块状噪声覆盖裂缝纹理的问题。本文考虑的8个裂缝纹理特征定义如下(其中二值图像连通区域的最小外接矩形的长和宽分别设为l和w):
(1)面积S为二值图像连通区域包含的像素点个数;
(2)周长L为二值图像连通区域轮廓边缘的像素点个数;
(3)矩形度R=S/(lw);
(4)最小外接矩形的长宽较大值为M,M=max(l,w);
(5)分散度为D[13],D=L2/S;
(7)圆形度为e[15],e=4πS/L;
(8)二值纹理占有率a为
(5)
式中,β(x,y)为二值图像z(x,y)连通区域内的像素值。
裂缝纹理提取的具体步骤为:首先在二值分割后的完整图像z(x,y)中计算每个连通区域Ak(x,y)的8个特征值,其中k=1,2,…,N,N为连通区域的个数;然后进行裂缝纹理的提取
Ak(x,y)=

(6)
式中,TS为面积阈值;TL为周长阈值;TR为矩形度阈值;TM为最小外接矩形的长宽较大值阈值;TD为分散度阈值;TC为集中度阈值;Te为圆形度阈值;Ta为二值纹理占有率阈值;在纹理特征分析后,进行形态学的腐蚀膨胀运算以修复裂缝断裂的部分。多个原始扫描图像在纹理特征分析后的实际效果如图4(d)所示。
2.4 裂缝毛刺剔除
为完成后续裂缝长度、宽度测量和裂缝纹理的标注工作,本文采用文献[16]的快速并行细化算法对纹理特征分析后的二值图像进行细化以得到裂缝骨架图像。该算法属于拓扑细化法,利用火烧稻草模型,从二值图像的边界开始,向内层层剥离,反复迭代,直至生成单像素的裂缝骨架图像。多个原始扫描图像在图像细化后的实际效果如图4(e)所示。
在以上图像细化过程中会产生一系列毛刺,它们作为裂缝骨架的无用短小分支,严重影响裂缝长度和宽度的计算,因此本文进行了裂缝毛刺剔除。
设每个骨架分支为Nk(i,j),其中k=1,2,…,N′,N′为骨架分支的个数。对Nk(i,j)中的任意点(i,j),取其3×3邻域
Dk(i,j)=
{(m,n)|i-1≤m≤i+1,j-1≤n≤j+1}
(7)
如果Dk(i,j)中(m,n)坐标的像素值Pk(m,n)满足式(8),则称点(i,j)为端点,即骨架分支Nk(i,j)的结束点;如果Pk(m,n)满足式(9),则称点(i,j)为节点,即骨架分支Nk(i,j)的起始点。
(8)
(9)
此外,骨架分支Nk(i,j)的长度Lk采用8方向链码(即Freeman编码)[17]进行计算
(10)
式中,Nek为偶数链码的个数;Nok为奇数链码的个数。若Lk小于骨架分支长度阈值,则将Nk(i,j)视为毛刺并剔除,其具体过程如式(11)所示。
(11)
多个原始扫描图像在裂缝毛刺剔除后的实际效果如图4(f)所示。

图4 裂缝检测效果分步显示
3 实验测试与结果分析
本文首先采用移动小车(运行速度为800 m·h-1)和Faro扫描仪(型号为FocusS150,正射影像图的检测精度为2 mm)实地扫描广州地铁4号线万胜围站到车陂南站的隧道表面以获得真实的裂缝图像,并将其作为实验的原始扫描图像。然后,根据广州地铁4号线、7号线、深圳地铁2号线等隧道表面真实裂缝图像的灰度信息,并结合纹理特征分析为方案中各参数设置经验值,其中Ts=6×min(l,w),TL=20,TR=0.75,TM=20,TD=25,TC=0.6,Te=0.4,Ta=0.19,Tl=15。选中裂缝区域并进行裂缝的自动化检测与标注,部分的裂缝检测结果如图5所示,其中裂缝标注的第1个数字为地铁隧道环号,第2个数字为该环的裂缝序号。值得注意的是,在裂缝检测中出现了裂缝断裂(如21-2裂缝和366-1裂缝)、局部裂缝丢失(如503-1裂缝)等现象,但这并不影响对裂缝整体走势的判断。针对三维激光扫描获得的地铁隧道裂缝图像,本文所提算法在选中裂缝区域后能够较好地将裂缝从背景灰度中分离出来。裂缝骨架图像在裂缝毛刺剔除后得到单像素裂缝骨架图能够较为准确地描述裂缝主体走势。在裂缝区域图像上利用若干个像素宽度的曲线绘制裂缝骨架图的轮廓,即可实现裂缝的自动化检测与标注。
此外,本文以文献[2]所提的算法(简称Wang算法)作为对照方案。由于三维激光扫描与工业相机的图像采集方式和图像分辨率均存在差异,因此Wang算法的图像预处理部分采用本文所提算法。裂缝检测效果对比如图6所示。由图可知,当裂缝表面不存在块状噪声时,两种算法均能够准确地检测出裂缝。然而,当裂缝表面存在块状噪声时,Wang算法会出现裂缝漏识别,而本文所提方案仍然能够准确地检测出裂缝。其原因是Wang算法在进行纹理特征分析时,将裂缝二值图像中目标点总数与裂缝骨架图像中目标点总数的比值近似计算为裂缝宽度,并将真实裂缝宽度的像素点个数作为阈值来筛除虚假裂缝,导致裂缝漏识别。而本文所提算法通过8个特征值来滤除虚假裂缝,当裂缝表面存在块状噪声时的检测效果优于现有方案。
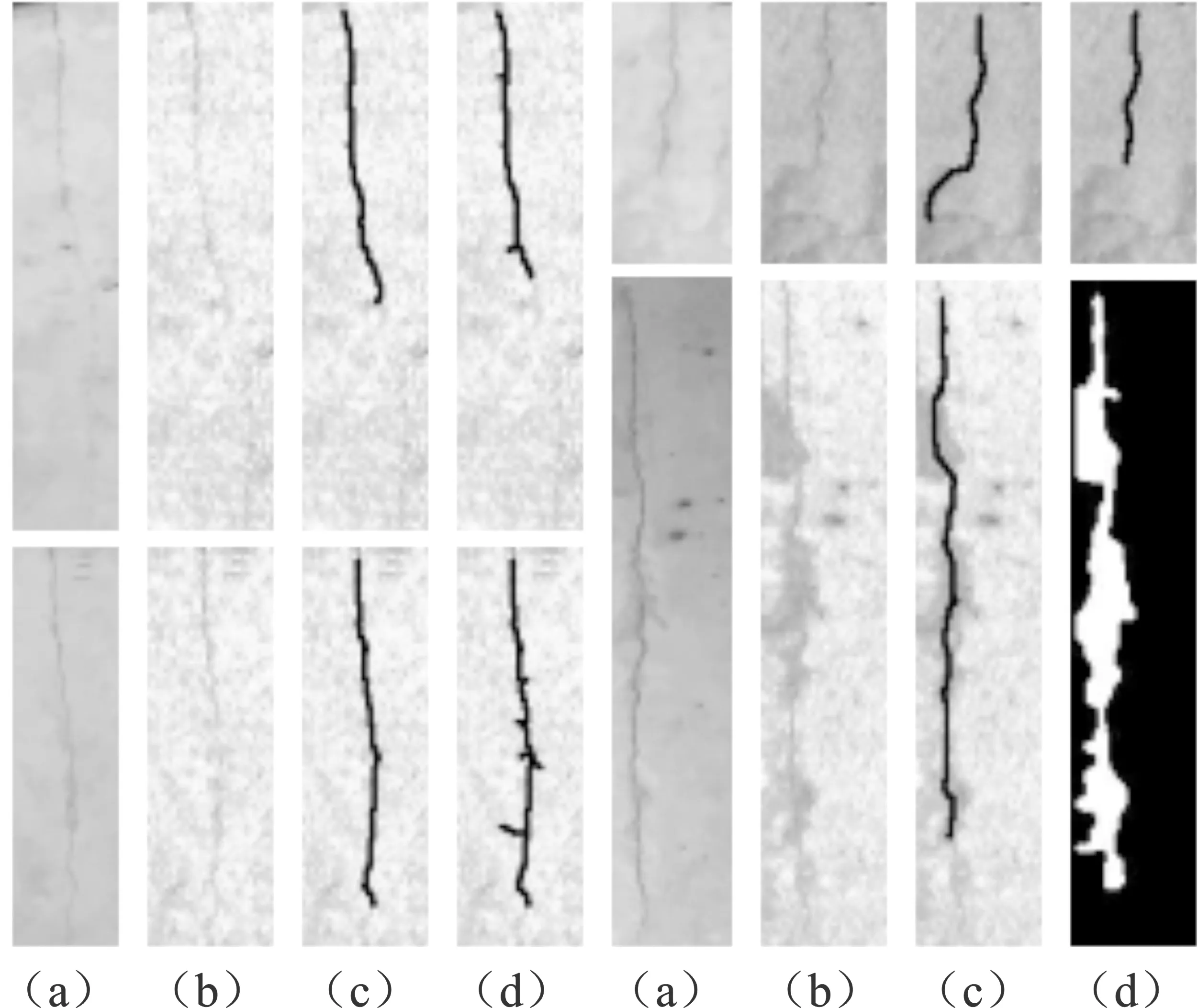
图6 裂缝检测效果对比
当裂缝表面不存在块状噪声时,或在复杂环境存在块状噪声覆盖裂缝表面区域时,本文算法均可有效地检测出裂缝信息,体现了本文算法检测的完备性与全面性。
4 结束语
为实现对地铁隧道裂缝的自动化检测,本文提出了一种基于纹理特征分析的地铁隧道裂缝检测方案。该方案首先对裂缝图像采用多种图像增强、去噪手段相结合的预处理算法以改善图像质量;然后对图像进行分块并对分块区域采用改进的最大类间方差法进行二值分割,并利用8个特征值滤除虚假裂缝;接着采用一种新颖的裂缝毛刺剔除算法以滤除骨架的无用短小分支并保留主体走势;最终实现地铁隧道裂缝的自动化检测。此外,本文基于实地采集的地铁隧道真实裂缝图像进行了诸多实验,并与现有方案进行了对比。实验结果表明,针对三维激光扫描获得的地铁隧道裂缝图像,本文所提算法在选中裂缝区域后能够较好地将裂缝从背景灰度中分离出来,并可实现裂缝的自动化检测与标注,且当裂缝表面存在块状噪声时,本文所提算法的检测效果明显优于现有方案。在后续工作中,本文将对裂缝图像的8个特征和灰度共生矩阵的多个统计参数进行特征筛选,然后引入机器学习算法对图像分块并进行真假裂缝的自动分类,使地铁隧道裂缝检测算法更加智能化。