船型桁架结构网箱系泊方式优选及影响参数分析
2022-11-09庞国良黄小华吴元紧陈欣铤陈昌平
张 松,庞国良,黄小华,吴元紧,陈欣铤,陈昌平
(1 大连海洋大学海洋与土木工程学院,辽宁 大连 116023;2 中国水产科学研究院南海水产研究所,农业农村部外海渔业开发重点实验室,广东广州 510300;3 三亚热带水产研究院,海南省深远海渔业资源高效利用与加工重点实验室,海南 三亚 572000)
近年来,随着人们生活水平的逐渐提高,人们对水产品的需求也逐渐增加,网箱养殖作为中国水产养殖中一种重要的养殖模式,对水产品供给具有重要支撑意义。2020年中国海水鱼类养殖产量为 174.98万t,其中网箱养殖产量占比达49.04%[1]。由于近年来近海养殖空间不足、水质污染等问题出现,水产养殖开始向外海探索,但在外海海域往往面临台风大浪等恶劣海况,传统的柔性塑料网箱在面临这样的外海环境时其结构安全性难以保证,因此大型深远海钢制桁架网箱平台得到广泛的关注并且国内外已有多个网箱平台投入实际养殖生产,如挪威“Ocean farm 1”“Havfarm 1”,国内的“德海一号”“深蓝一号”等深水网箱[2]。
目前海水养殖使用占比最高的网箱还是高密度聚乙烯(high density polyethylene,HDPE)重力式网箱,因此关于其相关研究也相对丰富,主要研究方法有物理模型试验[3-6]、海上实测[7-9]、理论求解[10-11]和数值模拟[12-13],研究工作也大多围绕组成网箱系统的浮架系统[14-17]、系泊系统[18-20]和网衣系统[21-22]三部件展开。大型桁架结构网箱作为一种近些年来才兴起的新型养殖平台,对其研究起步较晚,但HDPE网箱的相关研究方法及积累可为钢制网箱平台研究提供很好借鉴参考。关于深远海网箱的研究,Li 等[23-24]通过数值仿真的方法对一种船型网箱进行水动力特性分析,并对其系泊系统的迭代计算进行了优化,使对根据该计算方式设计的系泊系统的计算效率显著提高。张新昊[25]使用SESAM软件提出一种与HAVFARM 1结构相似的网箱概念设计,并基于极端海况下的最优的系泊方式研究网箱在波浪下的运动响应。陈炫光等[26]分析了串联浮筒的大小、位置对船型网箱水动力特性的影响。王绍敏等[27]采用有限元方法针对“德海一号”大型桁架网箱展开频域分析,结果表明养殖船的附加质量、辐射阻尼对波浪频率的变化较为敏感。黄小华等[28]通过物理模型试验探究了“德海一号”网箱在 3 种系泊方式、3种压载状态和6种波况下的网箱动力响应情况,对系泊方式的优选提出建议。Zhao等[29]采用水槽试验的方法,根据相似准则设计的Ocean Farm 1的缩尺模型,对该半潜式网箱的动态运动及系泊受力进行了分析。Yu等[30]采用数值模拟方法对Ocean Farm 1与补给船的碰撞进行分析,确定了结构集中破坏的位置。
本研究针对一种深远海船型桁架结构网箱,建立其水动力数值计算模型,通过与物理模型试验结果对比,在验证数值模型的准确性后,开展波浪作用下的网箱动态响应分析和锚绳张力及卧链长度的模拟研究,分析讨论不同系泊方式对网箱的影响,并开展系泊参数分析,以提高网箱对极端海况的适应性,旨在为网箱系泊系统的优化设计提供理论依据和数据支撑。
1 研究方法
1.1 网箱模型参数
本研究中的深远海船型桁架结构网箱主要由网箱主体和系泊系统组成,其中首尾浮筒、挡流板和桁架构成网箱主体,配重、锚和锚链构成系泊系统,具体主要参数如表1所示。

表1 网箱主要参数
网箱具有两种作业状态,正常作业状态和风暴下潜状态,在面临恶劣海况时网箱主体可以下潜到水面以下从而达到减少波浪冲击目的,两种作业状态如图1所示。

图1 网箱工作状态示意图
1.2 基本理论
(1)网箱浮筒采用面元模拟,基于势流理论,对流场做出以下假设:假定流场中的流体无粘、不可压缩,流动有势,自由表面的入射波为微幅波,则流体的运动可用三维势流理论加以描述。网箱在静水自由表面上做6个自由度摇荡运动时,一阶不定常速度势Φ满足以下条件可使联立方程得到定解:
在流场范围内满足 Laplace 方程 :

(1)
在自由表面:
(2)
湿表面条件:
(3)
海底边界条件:
(4)
无穷远处边界条件:
(5)
式中:g为重力加速度,t为时间;U为湿表面某处速度;n为湿表面某处单位法向量;H为海底距水平面距离;R为空间一点到分析处的距离;k为波数。
(2)网箱主体桁架可视为小尺度构件,可采用Morison单元进行模拟。对相同截面特征杆件沿着长度方向从而求出整体受力即莫里森公式:
(6)
(3)针对系泊系统的模拟,本文采用连续介质法,把系泊缆看作连续的弹性介质对网箱锚绳的系泊进行分析,离散有限元模型动力平衡方程:
(7)

惯性矢量表示:
(8)
式中:M是系统质量矩阵,包含结构质量矩阵MS;MF为内部流体质量矩阵;MH为Morison公式中结构加速度水动力质量矩阵,是局部坐标附加质量的一部分。
阻尼矢量表示为:
(9)
式中:C为系统阻尼矩阵,包含结构阻尼矩阵CS(r),CH(r)为考虑绕射作用的水动力阻尼矩阵;CD为与位移有关的特定离散阻尼矩阵。
1.3 模型建立
通过软件ANSYS创建网箱模型,模型由网箱主体结构和系泊系统两部分组成,网箱主体结构主要包括主体桁架,首尾浮筒和挡流板。系泊方式上,为便于对数值模型的验证,系泊采用“Y”字型单点系泊,所谓“Y”字型,即将锚链分成两段,上段为两根长度相同的锚链分别连接网箱艏部两侧,下段采用单根锚链与锚点相连。锚链采用单点系泊(SPM)方式,在两段锚绳连接处配置一挂重,单点系泊所带来的风标效应能使得网箱艏部朝向随水流或浪向的改变而改变,这样有利于扩大养殖区内的废物及排泄物的扩散面积减小,加快养殖区内的水循环速率,还能降低网箱结构上所受环境载荷。在建模时,首先使用面元建立浮筒和挡流板结构,再基于Morison单元模拟网箱桁架结构。关于网衣结构部分,由于本研究主要关注点在网箱主体结构动态响应及系泊缆受力,所以在数值模型中未构建网衣结构,而是通过调整阻力系数Cd的方式考虑其对网箱主体及系泊系统的影响。模型创建完成后,将模型导入到AQWA中,输入网箱的质量、转动惯量及系泊系统相关参数,进行网格划分所建模型共包含32 219个单元,网箱水动力数值模型如图2所示。
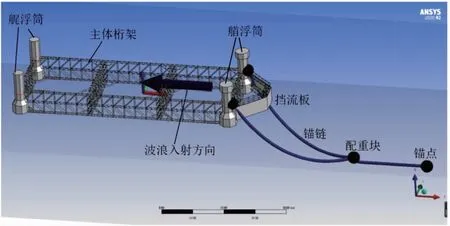
图2 网箱水动力数值模型
2 模型验证
2.1 物理模型试验


图3 网箱物理模型
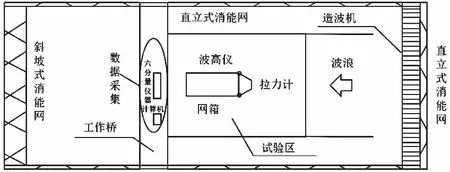
图4 模型试验布置图
2.1 试验工况
试验选取在网箱工作状态下,波浪波高为12.5、15.0、17.5 cm,对应的周期分别为1.4、1.7、2.1 s共计3组工况,根据相似准则,规则波下数值模型与物理模型波高与周期的对应关系表如表2所示。

表2 试验波浪流参数
2.2 数值模拟与试验结果对比
由于该网箱系泊方式为单点系泊,具有明显的风标效应,网箱艏部方向会随着风流浪的方向变化而变化,并且由于其特殊的Y字形系泊方式,使得网箱左右两侧受到相应的系泊拉力的束缚,因此横摇幅度很小,所以关于网箱运动响应,本研究仅考虑纵摇、纵荡和升沉3个方向。网箱动力响应及锚泊受力结果对比如下图5及图6所示。
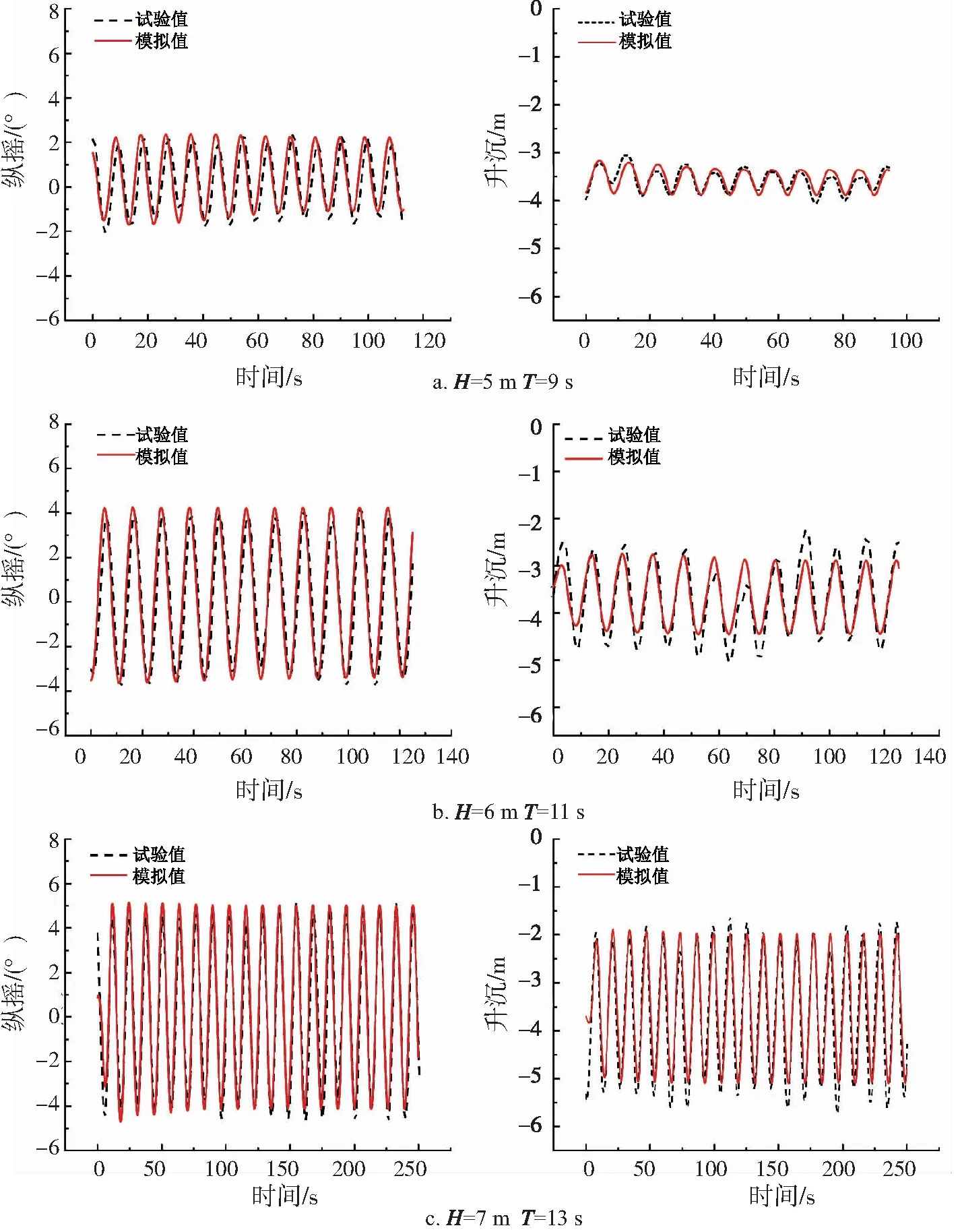
图5 不同波浪条件下网箱动力响应对比

图6 不同波浪条件下锚链系泊张力对比
从图中可以看出,网箱数值模型在三组波浪工况下计算所得的动态响应幅值和周期及锚绳的张力上与物理试验结果基本吻合,误差不超过5%,由此可以采用此模型对潜浮式网箱进行水动力分析,也可以证明本文网箱数值模拟方法的有效性。
3 不同系泊方式对比
3.1 系泊方式
系泊系统作为网箱的重要组成部分,是网箱抵御恶劣风浪海况的关键。传统的单点系泊系统一般采用单根锚绳的方式,本研究将其定义为“一”字型系泊,此外,本研究提出一种交叉式的“Y”字型系泊方式,相关介绍在1.3小节已有描述,两种系泊方式如图7所示。

图7 不同系泊方式网箱布置图
为探究两种系泊方式的可行性,分别对两种系泊方式下网箱在相同波浪条件下的运动响应及系泊锚链受力及躺地段长度进行模拟分析。
3.2 动态响应结果对比
图8所示为不同波浪工况下两种系泊方式的网箱动态响应结果。可以看出,两种系泊方式的网箱在波浪作用下的纵摇、纵荡、升沉运动有着相同的趋势,其中纵摇和升沉均与波浪周期和波高呈现正相关趋势。另外,还可以看出两种系泊方式的网箱在动态响应上无明显差别,这是主要是由于系泊系统只是给网箱提供一个稳定的系泊束缚,网箱的动态响应主要还是受自身固有特征和波浪参数的影响。
3.3 系泊受力及卧链长度结果对比
图9所示为两种系泊方式下各工况对应的最小卧链长度对比结果。

图9 不同系泊方式下锚链卧链长度
可以看出,在各组波况下,“Y”字型系泊的最小卧链长度均大于“一”字型系泊,波高为6 m时,三组周期下平均最小卧链长度的均值差值最大(179.16%),两者的差异随着波高的增加逐渐减小,当波高增加至10 m时,两者平均差值最小(14.06%)。在系泊张力方面,由图10可知,两者系泊方式的锚绳张力峰值均与波高呈正相关,与周期呈负相关,“Y”字型在所有模拟的波况下的系泊张力峰值均小于“一”字型系泊,在波高为10 m波浪周期为13 s时出现最大差值46.5%,所有试验工况平均差值为31.43%。
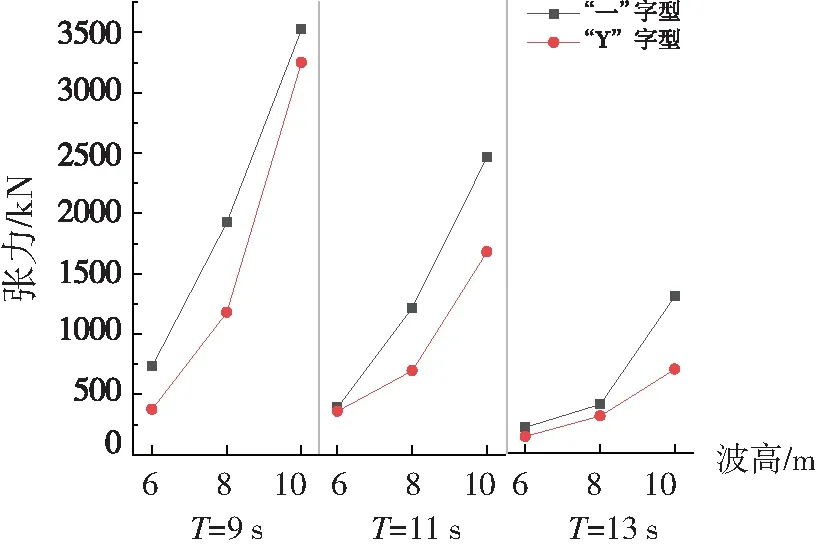
图10 不同系泊方式下锚链系泊张力
综上所述,可以看出,相较“一”字型系泊方式而言,采用“Y”字型系泊不仅不会影响网箱整体的动态稳定性,而且能够有效降低锚绳的张力,延长锚绳卧链长度,可以保障系泊系统的安全性,因此针对本文所提的船型桁架结构网箱,使用“Y”字型系泊对恶劣海况具有更好的对恶劣海况的适应性。
4 系泊影响参数分析
4.1 锚链长度影响
在确定“Y”字型系泊方式后,在某些极端波浪条件,比如10 m波高、9 s周期波况下,锚链张力峰值超过破断荷载并且卧链长度也较短,为提高网箱系泊安全,探究不同系泊参数对网箱系泊特性影响,本研究从锚链长度和配重块重量两个方面开展研究,波浪条件选定为10 m波高、9 s周期的规则波。
该网箱设计作业水深为30 m,上文模拟计算选定的锚链长度为90 m,即3倍水深长度,下面以单倍水深30 m为间隔,分别设置4~7倍水深长度锚链进行对比分析。表3为网箱不同锚链长度下的动态响应模拟结果,网箱的3个自由度上的运动响应均取网箱稳定状态下的幅值。从表中可以看出随着锚链长度的增加,网箱的纵摇、升沉幅值略有增加,纵荡幅值略有减小,但增量与减量的值均较小,所以锚链长度的增加对网箱的运动响应影响不大。
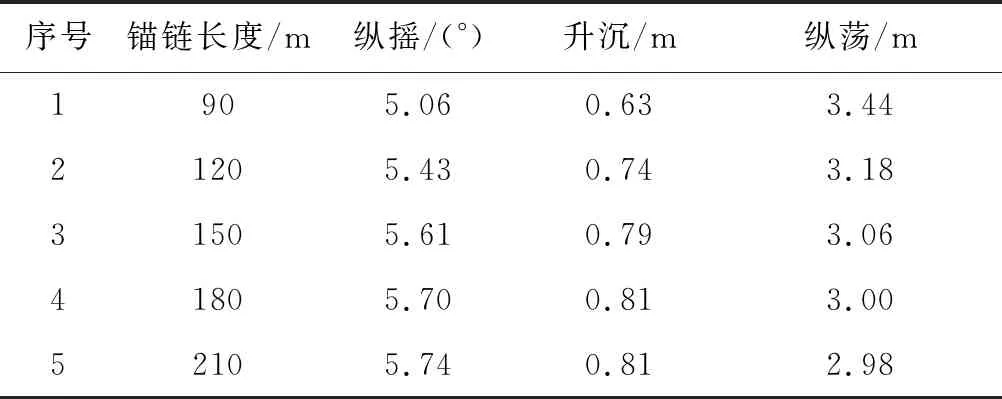
表3 不同锚链长度下网箱运动响应模拟结果
图11为网箱系泊张力峰值变化曲线,从图中可以看出随着锚绳长度的增加,系泊张力峰值持续减小,当锚链长度从90 m延长至120 m、延长1倍水深长度时,系泊张力峰值从3 251.11 kN减小至1 727.26 kN,出现了最大减幅(46.87%),当锚链长度继续增加至210 m(7倍水深)时,锚绳受力进一步减小,系泊力峰值减小至1 209.57 kN。
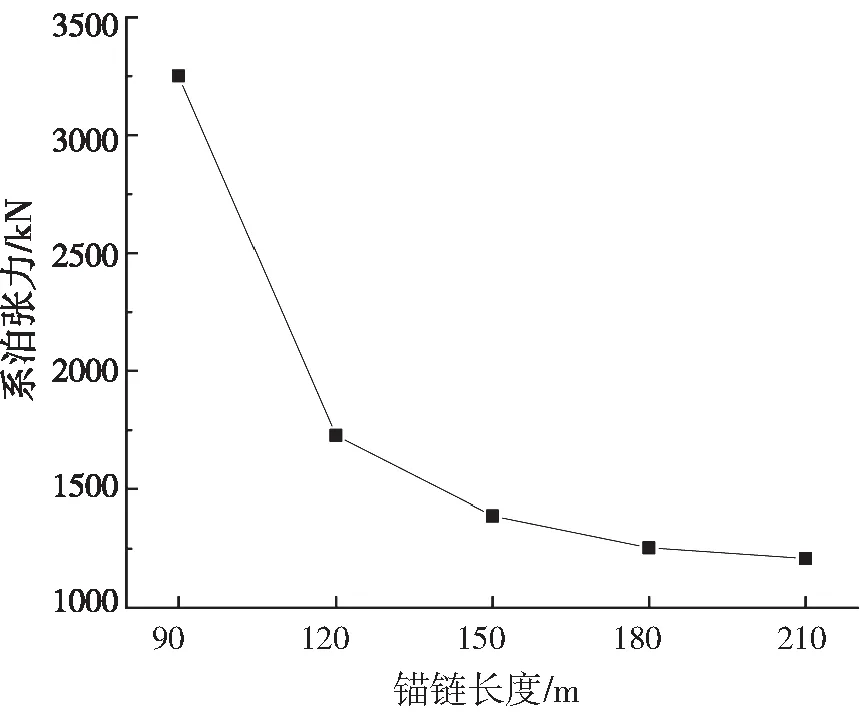
图11 不同锚链长度下系泊张力峰值
图12为网箱最小卧链长度变化曲线,从图中可以看出随着锚绳长度的增加,最小卧链长度持续增加,每增加1倍水深,最小卧链长度平均增加59.86%。

图12 不同锚链长度下最小卧链长度
根据上述分析结果,为达到较小的系泊受力和更大的最小卧链长度,应尽量选取长度较大的锚链,但需要注意的是网箱在建造和投入使用中往往会受到安装成本和海域范围等制约,锚绳长度也不是任意加大的。
4.2 配重块重量影响
为讨论配重块重量参数对网箱动力特性及系泊缆响应的影响,选定锚链长度为150 m,以5 t配重重量为起点,2.5 t为间隔,共计5组配重重量进行参数设置。表4为不同配重块重量下的网箱运动响应模拟结果,可以看出配重块重量的增加对网箱的动态响应的影响不明显,重量从5 t增加至15 t,网箱的纵摇增加了0.47°,升沉增加了0.07 m,纵荡减小了0.11 m。
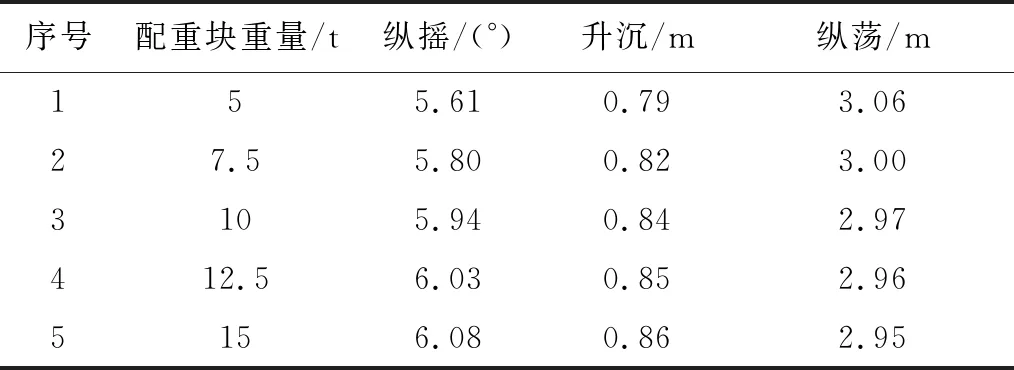
表4 不同配重块重量下网箱运动响应模拟结果
图13为网箱锚链的系泊力峰值变化的趋势图,可以看出系泊张力与配重块重量呈负相关,重量从5 t增加至15 t,系泊张力峰值从1 388.86 kN降至815.76 kN,降幅为41.26%;此外,随着配重块重量的增加,最小卧链长度也有着较为明显的增加,如图14所示,配重重量从5 t增至15 t,最小卧链长度从3.76 m增至8.30 m,增幅达120.81%。
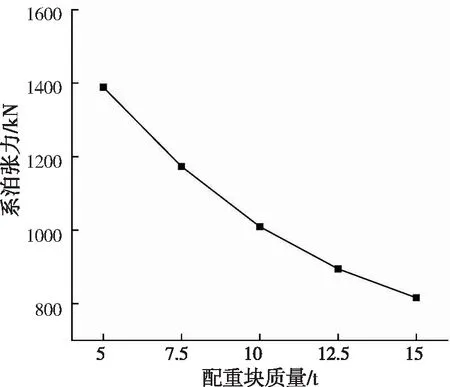
图13 不同配重重量下的系泊张力峰值
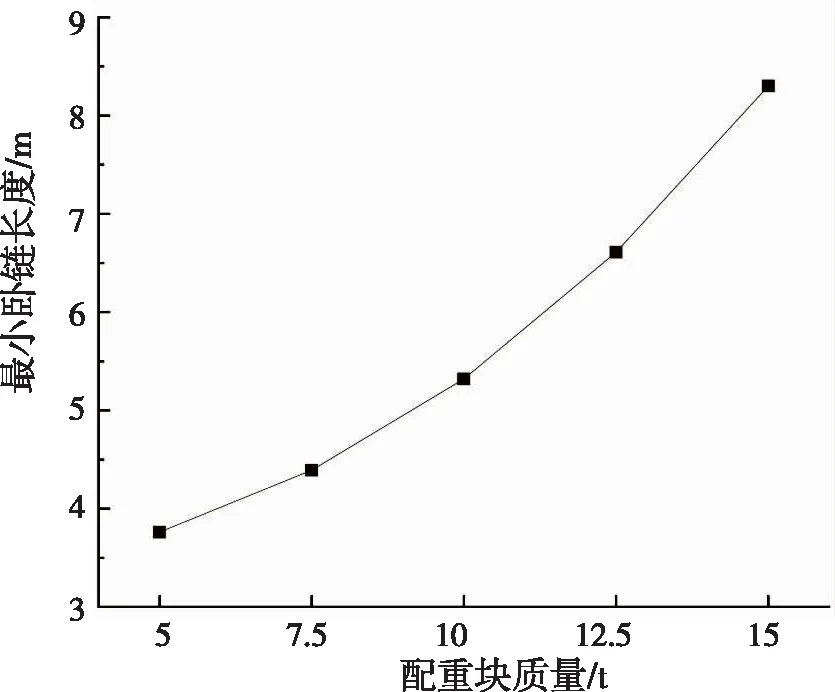
图14 不同配重块重量下的最小卧链长度
综上可以看出,通过延长锚链长度和增加配重块重量能够显著降低锚链的系泊张力大小,黄小华等[28]对与本研究对象结构相似的“德海1号”网箱开展的物理试验也得到了类似的结论,从而也侧面验证了本研究数值模拟结果的可靠性。
5 结论
本研究通过创建网箱水动力模型,对两种系泊方式下网箱主体运动及系泊特性开展研究,又从系泊长度和配重块重量两个方面开展了相应的系泊影响参数分析,得到以下结论:1)本研究创建的网箱水动力模型模拟计算结果与物理模型试验结果误差不超过5%,验证了数值模型的有效性,相应建模方法可以为大型网箱水动力模型建立提供参考;2)“Y”字型系泊的系泊张力峰值小于“一”字型系泊,且随着波高增加,优势更为显著,此外,不同波况下“Y”字型系泊的卧链长度均长于“一”字型系泊,以上证明针对本研究网箱对象,“Y”字型系泊优于“一”字型系泊;3)随着锚链长度增加和配重块重量增加,网箱系泊张力会显著减小,最小卧链长度会显著增加,因此可通过增加锚链长度及增加配重块质量改善网箱系泊性能、保证系泊安全。
