一种轨道式智能行人过街系统的设计
2022-11-09郭云啸
郭云啸
(辽宁铁道职业技术学院 铁道工程学院,辽宁 锦州 121000)
0 引言
行人过街设施是保障行人安全、高效过街的重要手段.目前,行人过街设施存在诸多问题:过街天桥或过街地道等过街设施给行人,尤其是一些体弱者步行过街带来极大不便,导致有些步行过街设施被行人弃用[1];自动扶梯式过街天桥的建造与使用成本都较高,并不能得到广泛的应用;斑马线等过街设施,无法有效约束行人过街行为;行人过街速度差异大,总通过时间取决于最后通过路口的行人,导致机动车等待时间延长.因此,有必要推动新型自动过街设施及其技术的实现[2],减少车辆等待时间,增加行人过街的舒适性、便捷性和安全性.
轨道式智能行人过街系统是一种结合铁路、公路、缆车等多种交通方式优势,以类似“摆渡”的模式将行人安全、便捷地运送过街的智能交通设施.该设施通过对过街行人“化零为整”保障行人以较快的统一速度集中通过路口,避免行人过街速度差异造成车辆滞留,实现“第一人到达即最后一人到达”的理想状态.相比于传统的天桥、地下人行通道、过街平台等设施,轨道式智能行人过街系统安置位置灵活、施工便捷,同时避免了行人绕路和上下台阶的麻烦.本文提出一种轨道式智能行人过街系统,为推动新型自动过街设施及其技术的实现提供新的思路.
1 轨道式智能行人过街系统设计思路
一方面,当前行人过街设施很难做到保障机动车通行能力和行人过街安全、减少行人过街延误时间、满足人性化要求等多方面的统一.熊文等就过街设施相关问题对上海市民进行了调查,认为增加自动扶梯等人性化设计是影响行人偏好的根本因素[3].所以,在新型过街设施的设计中,应从行人,特别是老人、儿童、残障人士等群体的角度出发,设计便捷、舒适的过街方式,从而促进“以人为本”过街方案的实现,有效缓解城市交通拥堵问题,进一步提升城市形象[4].
另一方面,行人过街需求广泛存在,过街设施的建造成本和使用效率也是设计中重点要考虑的两点问题.过街设施应能满足一定的行人通过量,避免出现行人滞留,同时建造成本要结合地方的财政预算,这就对过街设施的架构设计提出了挑战.
再有,为了避免对公路交通产生严重干扰,过街设施应便于施工且工期较短,尽量减少对现有交通设施的破坏和改造,避免对水、电、暖、燃气管线造成影响.
本文综合考虑上述问题,设计了一种便于施工的轨道式智能行人过街系统.该设施采用轨道平台车承载行人过街,有效缩短机动车等待行人过街时间,发挥轨道载具安全稳定、高效廉价的优势;采用链条传输动力,使对向运动的平台以类似缆车的模式协调联动;平台与人行道契合,避免影响行车道和原人行道的正常使用;平台周围安置距离传感器,设置急停机制,保障平台运转安全;智能化控制系统实时监测行人数量及等待时间信息,智能协调交通信号,减少行人过街等待时间,提高行人过街舒适度.
2 轨道式智能行人过街系统设计方案
轨道式智能行人过街系统示意图如图1所示.每组过街设施由2个带有压力传感器的过街平台、梭形往复导轨、2组电动机、导轨内传动链条、控制器及其他电气设备组成.

过街系统下置电动机带动导轨内传动链条,链条带动2个过街平台沿梭形往复导轨对向运动,通过走行轮传动带动平台旋转固定角度,嵌入对侧街角缺口,完成一次过街行为,其细部设计如下:
2.1 走行机构设计
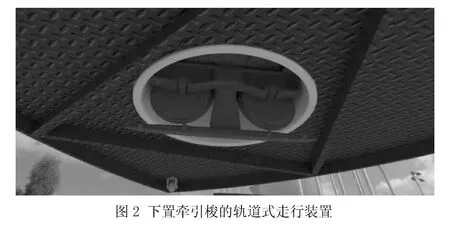
过街平台走行面为嵌入导轨的公路表面,为便于行人上下,平台高度需与人行道持平,设计采用轮径较小的走行轮;而小轮径走行轮的通过性差,在承受大荷载的情况下行进阻力、振动及磨损均较高:因此,平台采用轨道式走行机构设计,将大部分荷载集中于轮轨接触面.
如图2所示,轨道式走行机构置于平台中央,下方连接着与传动链条啮合的牵引梭,采用单列双轮设计,轮径约为300 mm,踏面分布于轮缘两侧,轮缘陷入轨道槽中.轨道式走行机构可承载平台主要重量,当发生偏载时由平台三个角点上的φ80 mm加宽万向胶轮承担额外荷载,以维持稳定.
2.2 承载平台设计
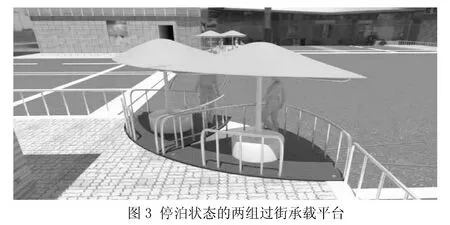
如图3所示,平台承载面是类似勒洛三角形的对称结构,其中两边与人行道街角弧度一致,第三边是以人行道路缘石延长线交点为圆心的弧.这种形状的设计使平台在过街过程中以较小角度的旋转即可嵌入对侧路口的缺口中,且不论平台嵌入哪侧路口,都能构成完整的弧线街角形状,不影响转弯车辆通行.同时,这种形状最大限度地保留了人行道的通行宽度,在街角有建筑物且人行横道宽度为4 m时,最窄处可保留约1.5 m的通行空间.
为容纳轨道式走行机构,平台中部设计为成φ800 mm、高度430 mm的圆柱形凸起,这一设计与普通座椅的高、深相似,便于行人围坐其上等候过街,凸起中心置φ100 mm立柱,顶部支遮阳伞并配备扶手、拉环;平台临街的两侧设护栏,后部中央设护栏,并留有出入口.
2.3 动力系统设计
动力系统包括牵引动力系统和自旋传动系统.
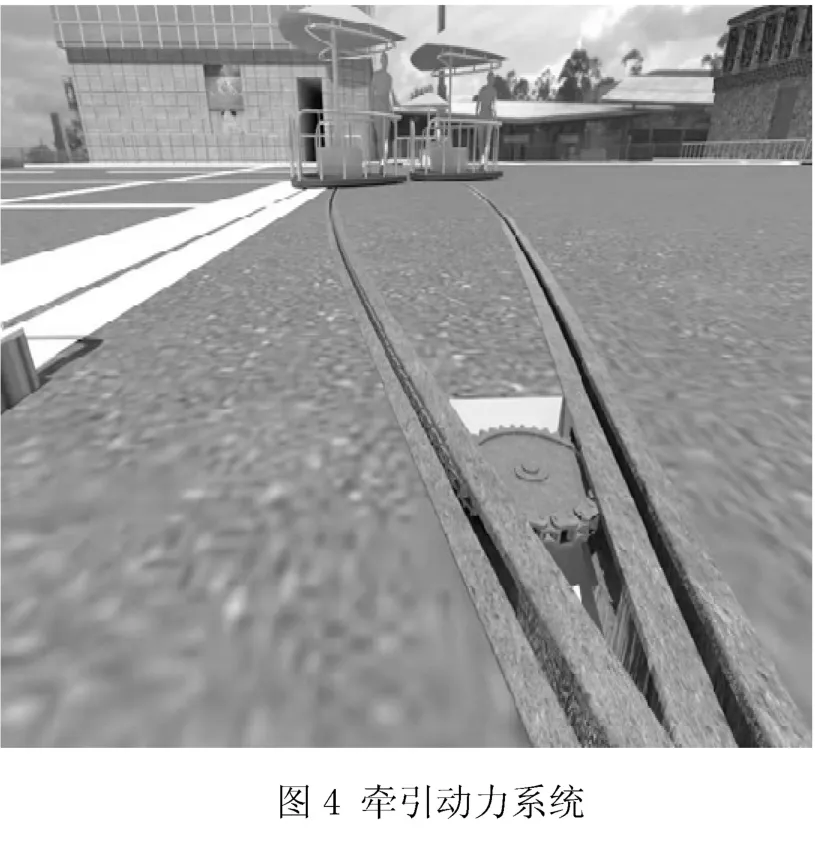
牵引动力源为2台预埋于街角承载平台下方的电机,通过链条啮合齿轮传动,链条嵌入轨道槽内的一侧,以防雨水侵蚀.链条与平台轨道式走行轮下方的牵引梭啮合,带动平台移动,如图4所示.
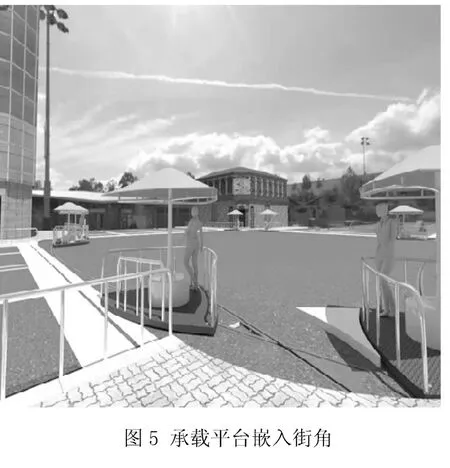
平台自旋是为将平台嵌入人行道街角缺口处所进行的角度调整过程.平台从一侧向另一侧街角移动的同时,需调整一个正角度值,反之需调整一个负角度值,平台过街过程中旋转的绝对角度为45°,但相对于运行在梭形往复导轨上的走行轮来说,平台旋转的角度并不相同,靠近路口的平台相对转角为45°+梭形导轨圆心角,远离路口的平台相对转角为45°-梭形导轨圆心角,因此需要分别设置自旋传动比.自旋动力依靠轨道向走行系统施加的反作用力产生,轨道轮通过齿轮、90°换向齿轮、传动比调整齿轮将纵向扭矩转为水平扭矩,带动平台自旋.在自旋过程中,平台会由于轨道轮磨损、打滑产生角度误差,但这种误差在嵌入街角行为中得到校准,并不会积累,因此不会影响系统运行,如图5所示.
3 轨道式智能行人过街系统运行方式
系统的运行方式包括触发运行和信号协同两种.
触发运行有三种情况:一是时间触发,即当平台重力传感器检测到有行人进入承载平台时开始计时,计时达到行人极限等待时间后被动触发过街行为;二是过街人数触发,即在未达到等待时间但重力传感器检测到满载重量(约15人)时,主动触发过街行为;三是根据固定信号配时进行的计划触发.
信号协同是指过街平台与机动车道信号灯的信号协同,此协同行为需要单独设左转、直行和右转信号灯.当某车道平台行人过街时,需切断该车道的出入车流,因此信号配时应考虑系统的运行进行综合设计;也可在信号切换过程中设置延迟,利用延迟时间同时运行各车道过街平台,这样虽然增加了车辆额外的等待时间,但避免了为行人步行过街设置较长的红灯配时.根据计算,在双向八车道宽30 m、人行道4~5 m的情况下,过街平台单次最大可输送约2×15人至2×22人,单次输送时间约为7 s.这与正常成年行人平均步行过街速度20 s相比,时间缩短了一半以上,如果考虑到老人、儿童、残疾人等步行速度较慢的群体,节约的过街时间将更为可观,车辆受行人过街时间的影响将极大缩短.同时,封闭式的过街平台消除了行人违规过街对行进车辆造成的影响,总体上提高了交通效率.
4 结语
本文提出的轨道式智能行人过街系统主要应用于人流、车流冲突严重的大型路口.该系统设计采用全封闭栏杆集中运输,杜绝行人违章过街行为;同时,过街平台与人行道路面持平,保障了行人舒适度,提高了行动不便人士过街的安全性;通过结构优化避免了车道停止线后移,减少了对车流通过效率的影响;过街平台设计位置比传统斑马线更靠近路口中心,缩短了行人过街的步行距离;在配时设计方面,虽然过街平台对路口交通产生了一定影响,但极大缩短了行人过街导致的车辆等待时间,避免了零散过街行人对交通产生的持续干扰,改善了城市交通拥堵的状况,提高了交通效率.同时,本文所设计的轨道式智能行人过街系统也为过街设施的优化和创新提供了新的思路.
