盲人智能过街辅助系统设计
2015-10-08王少华等
王少华等

【摘 要】介绍了基于飞思卡尔K60单片机的盲人智能过街辅助系统。在详细分析盲人过街需求的基础上,采用IAR6.3开发平台进行程序设计,基于飞思卡尔K60芯片设计硬件模块,进行超声波和红外测障测距,通过OV7725鹰眼摄像头实现斑马线视频图像采集。实验室试验结果表明,该系统能够保证盲人走在斑马线中间区域并可避免与障碍物相撞,可有效应用于盲人过街辅助。
【关键词】盲人;过街;辅助系统;飞思卡尔K60
【Abstract】This paper introduces an intelligent intersection crossing assist system for The Blind based on Freescale K60.On the basis of a detailed analysis of the needs of the blind man when they across the street, it use IAR6.3 development platform for programming, design based on hardware module based on Freescale K60 chip,detects whether there exist obstacles within a distance in front by means of ultrasonic and infrared and achieve zebra video image by OV7725 Hawkeye camera. The Laboratory test results show that the system could ensure that blind people can walk on the center of zebra and avoid obstacles, will be helpful to assist blind people to across the street.
【Key words】The blind; Intersection crossing; Assist system; Freescale K60
0 前言
根据世界卫生组织( WHO) 和2006年中国第二次残疾人调查资料统计数据显示,中国约有1233万盲人,是全世界盲人最多的国家,占整个世界盲人数的20%[1],并且以每年45万的速度增加。因视力问题无法看清道路、交通标志标线和障碍物,在加上国内部分地区盲道占用、盲道设计不合理现象较为普遍突出,这都给盲人出行造成了极大的困难。随着社会经济的发展,如何为这一特殊群体服务,保障其日常交通出行便利,体现了整个社会对残障人士的关爱与温情。
为此,国家自2002年起,北京、天津、上海等12个城市被国务院命名为全国无障碍设施建设示范城市。深圳市轮翼天使网络科技有限公司开发了用于无障碍设施查询的手机应用easy-Go。新疆大学的王冠生[1]等人重点介绍了电子式行进辅具、移动式导盲机器人、智能盲杖以及智能导盲系统等辅具的历史发展应用现状,并指出了发展趋势。成都理工大学的王小伟采用DSP+MCU的双CPU体系结构方案,实现了GSM短信收发、GPS定位、盲道识别等功能[2]。中北大学的赵晓东进行了超声波导盲杖的设计[3]。天津大学的曹玉珍等建立了基于图像的导盲辅助设备中道路斑马线的识别方法[4]。郑州大学的邱晶晶进行了红绿灯电路模块、盲道和斑马线的识别[5]。
本文建立了一个盲人智能过街辅助系统。在详细分析盲人过街需求的基础上,采用IAR6.3开发平台进行程序设计,基于飞思卡尔K60芯片设计硬件模块进行超声波和红外测距,进而测出障碍物的高度。通过OV7725鹰眼摄像头实现斑马线视频图像采集,确保盲人行走在中线附近的安全区域中[6]。
1 盲人过街系统硬件设计
在众多的导盲辅助工具中,使用最广泛的是导盲手杖,在上面集成一组传感器小型控制计算机等,有的甚至装有导轮移动平台,具有一定智能性,考虑到出行的便利性,结合天津市盲人协会调研,在保持盲人便利性基础上,采用了手推车的设计方案,通过红外和光电传感器的高低布置,来探测前方是否有障碍物以及障碍物的高度,通过视频图像检测斑马线并保证盲人走在斑马线中间,具体应用到的硬件设备有:
1.1 飞思卡尔K60单片机
本系统采用的是飞思卡尔公司Kinetis系列的MK60DN512ZVLQ10单片机。该款单片机主频高达100MHz,有多个可编程定时器,可捕捉多路通道信号。支持所有串行时钟格式和采样模式中断控制器性能良好,且中断的响应延时为5个周期,并且同时最多可以有5个外部中断,7个可编程的优先级,5个处理器异常。该芯片尺寸较小,仅为5cm×4cm,低功耗的高速闪存技术,全静态的设计,3.3v的工作电压,低功耗。
1.2 红外光电传感器
红外线光电开关(光电传感器)属于光电接近开关的简称,它是利用被检测物体对红外光束的遮光或反射,由同步回路选通而检测物体的有无,其物体不限于金属,对所有能反射光线的物体均可检测。漫反射式光电开关是一种集发射器和接收器于一体的传感器,光电开关将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱或有无对目标物体进行探测。当有被检测物体经过时,将光电开关发射器发射的足够量的光线反射到接收器,于是光电开关就产生了开关信号,根据输入信号的高低电平即可判断前方是否存在障碍物。本系统采用的是E18-D80NK 红外光电传感器。
1.3 超声波传感器
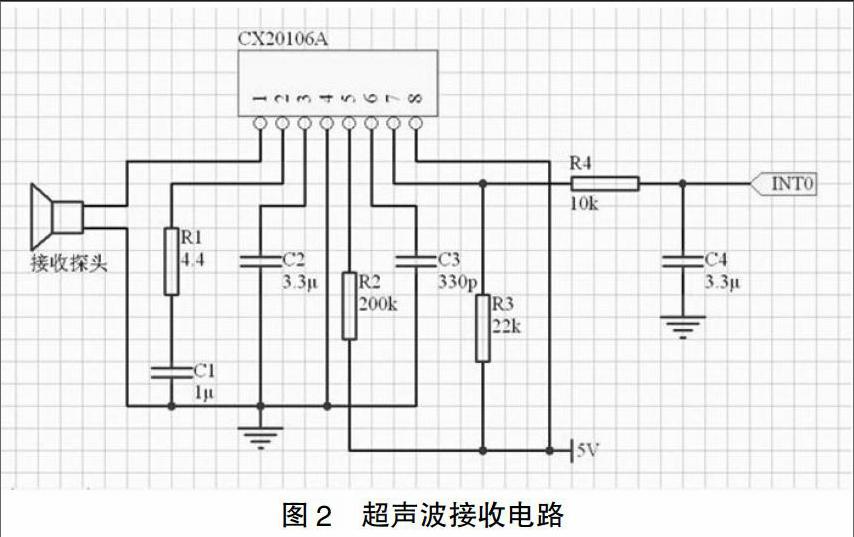
超声波传感器是利用超声波的特性研制而成的传感器。超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生振动产生的,它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。采用如图2所示KS103超声波测距模块,其具体功能如下:
含实时温度补偿的距离探测,高探测精度;
探测范围1cm~800cm及1cm~1000cm;
探测频率达500Hz,即每秒可探测500次;
使用I2C/串口接口与主机通信,自动响应主机的I2C/串口控制指令;
5s未收到I2C控制指令自动进入uA级休眠,并可随时被主机I2C控制指令唤醒;
宽工作电压范围 (3.0V~5.5V)。
1.4 鹰眼摄像头
本系统采用以OV7725鹰眼摄像头。摄像头为30万像素,驱动电压为3.3V,12M有源晶振,384KB的FIFO AL422B,焦距3.6mm,光圈F2.0,视角92°,价格便宜,并且方便信号处理,在模块电路板上可直接集成硬件二值化电路,输出的二值化图像清晰,同时噪声较少。视频图像采集的流程为:
(1)需要采集图像时,开场中断。
(2)场中断来了,开行中断和初始化DMA传输。
(3)行中断来了便设置DMA地址,启动DMA传输。过滤掉前面几行和较远处几行不采集。
(4)每个PCLK上升沿来了都触发DMA中断,将摄像头输出的值读取到内存数组里面。
(5)当触发80次(80=图像列数目)后就停止DMA 传输。
(6)行中断次数等于一幅图像的行数。采集完成后便关闭行中断和场中断。
2 盲人过街系统软件设计
2.1 超声波传感器软件设计
该模块使用方法简单, 控制单片机一个端口发出一个10us以上的高电平,就可以在接收端口等待高电平输出.一有输出就打开定时器计时,所计时间就是超声波从发射到返回的时间,如此不断的周期检测,就可实时测量盲人距前方障碍物距离。红外模块软件设计与此类似。
while(!gpio_get(PTA2)); //等待高电平出现
pit_time_start(PIT0);//开始计时高电平持续时间
while(gpio_get(PTA2));
timevar = pit_time_get_us(PIT0);
printf("\n\n本次时间为:%dus",timevar);
temp = timevar; //获取计时时间
pit_close(PIT0); //开始计时
temp = temp/10;//ms
temp=temp*170;//340m/s *t[s] /2 = distance m
2.2 视频图像模块算法设计
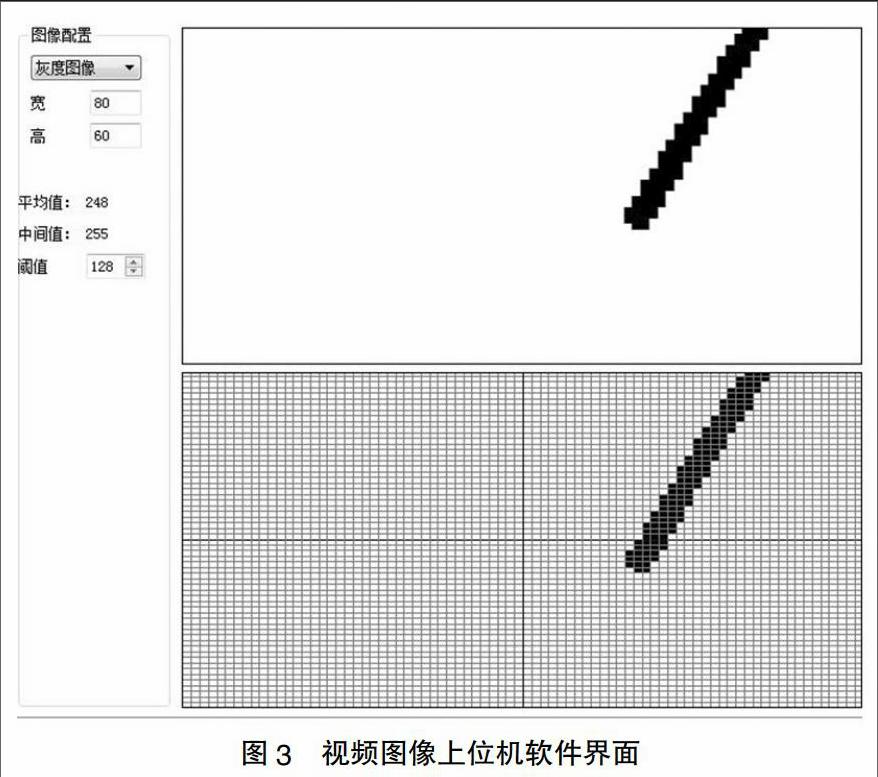
首先识别斑马线跳变沿,通过识别跳变沿确定斑马线的左右边侧位置。通过从左到右的方式识别中线,如果中心点坐标在25-55之间则认为是在中间,否则就是在两侧。图像中黑色的数值为0,白色为255,假设第i点的二值化值为image[i],第i+1的为image[i+1],因此如果image[i]> image[i+1],则认为识别到了右边侧;反之则为左边侧。
其次通过确定斑马线中线,确定安全区域。将左边侧和右边侧的坐标值求和之后除以2即得中心点的坐标,然后通过计算整个图像的有效中心点。将最上边和最下边的点的坐标进行比较,如果两者之间的差距小于6的话,则认为是个直线,否则是个斜线。如果是直线的话,有效的中点值与25和55进行比较,通过比较识别出直线在整个视频图像中的位置。如果是斜线的话,通过识别将最上边和最下边的值与中间值进行比较得出中线具体是在图形的那个位置。如果最上边的值小于最下边的值,则为偏向左侧的斜线。否则则是偏向右边的斜线。由图可知当前方向是偏向右边的。最后根据偏向予以语音提醒。
3 结语
为了辅助盲人过街,十分有必要对斑马线和道路障碍物进行实时监测。本文设计了一种基于飞思卡尔K60的智能盲人过街辅助系统,结果表明,该系统各模块工作正常,能够有效监测障碍物距离,识别障碍物高度是否高于传感器设置高度,同时,完成了初步的斑马线中线和安全区域监测。但本系统只完成了理想条件下的实验室图像处理工作,还有待于进行不同传感器的数据融合算法设计,以及室外斑马线实测,才能真正为盲人出行提供辅助。
【参考文献】
[1]王冠生,郑江华,瓦哈甫·哈力克,张洋,姚聚慧.盲人导航路径诱导辅具研究与应用综述[J].计算机应用软件,2012,29(12):147-151.
[2]王小伟.基于RFID的盲道识别系统设计[D].成都:成都理工大学,2009.
[3]赵晓东.超声波导盲杖的设计[J].山西电子技术,2011(5):19-21.
[4]曹玉珍,刘刚,杨海峰.导盲系统中的道路斑马线识别方法[J].计算机工程与应用,2008,44(15):177-178.
[5]邱晶晶.多功能导盲装置的若干问题研究[D].郑州:郑州大学,2010.
[6]刘延霞,谷林柱.基于单片机的盲人避障装置的设计[J].软件,2011,32(3):101-104.
[责任编辑:汤静]
