大规模无人机集群动态网络技术研究
2022-11-08王露
王 露
大规模无人机集群动态网络技术研究
王 露
(中国电子科技集团公司第二十研究所,西安 710068)
针对大规模无人机集群协同作战对网络的服务需求,设计了一种集群动态分簇策略,以及一种面向大规模集群的动态路由策略。提升了自组织网络对大规模集群的服务效能,支撑集群未来多样化协同作战。
无人机集群;动态分簇;大规模路由
0 引言
随着现代战争装备及无人化作战理念的发展,无人机集群作战系统已成为世界各国军事装备的研发重点。大规模无人机蜂群协同作战将因高效费比和散系化特点成为具有颠覆性的新型作战样式。同时无人机集群在民用领域也被视作重要的发展方向,如大规模协同测绘、协同感知、自主相对导航等[1]。然而大规模集群协同作战对网络带来极大的挑战。传统的分层分级策略存在难以匹配高动态无人机集群的难题,同时考虑到大规模网络的干扰问题以及协同作战下的抗侦搜需求都要求无人机集群节点以较小功率进行组网,大规模网络下的复杂动态路由构建也是一大难题。
相较于更加小型化的、任务单一的无人蜂群,无人机集群能够执行更多复杂任务,通过网络内无人机相互通信协作,实现蜂群无法达成的复杂功能,这就对无人机集群网络服务提出了较高的要求。
现阶段无人机集群协同以小规模组网为主,10~20架规模通过地面站进行远程指令控制,所能执行的协同任务以及任务区域都因网络规模的限制而难以扩展,由此可见,无人机集群大规模动态网络的技术突破对无人机集群未来协同应用的发展具有重要意义[2,3]。
本文分析了大规模无人机集群网络的关键技术,提出一种动态分簇以及大规模路由策略,为未来大规模无人机集群协同应用的网络组织和运用提供了思路和方法。
1 研究现状分析
随着无人技术的快速发展,各军事强国近年来不断推进无人系统的发展,其中无人机发展最为迅猛,无人机未来典型的作战样式即为无人集群协同作战。美军针对无人集群作战提出了“分布式作战”体系,将作战要素分布在无人集群中,实现将多个作战平台整合至一个由“情报、监视、侦察(Intelligence,Surveillance and Reconnaissance,ISR)、打击、机动和保障”构成的综合体[3],既是传感器,也是可以产生作战效果的武器,实现武器运用从平台为中心向互联的信息驱动模式转变,进而最大程度地发挥多类型无人装备、有人与无人系统集合的优势[4-7]。
1.1 国外研究现状
从2010年起,美国海军、美国国防部高级研究计划局、国防部战略能力办公室等部门设立了多个无人集群相关项目,代表性项目主要有:
1)小精灵
小精灵项目针对的是空中分布式作战模式。解决小型、低成本无人机作战半径小,无法进行远距离作战的问题。该项目采用空中发射和回收技术,利用大型运输机对小型无人机进行远程投送,完成使命后能够快速回收,快速完成重置并等待下次使用。小精灵项目将带来作战模式的改变,如图1所示。以执行压制敌防空系统(Surpression of Enemy Air Defense,SEAD)任务为例,以前的战法是电子战飞机贴近到敌方防空火力区外围,对敌方防空雷达进行干扰、压制,小精灵项目设想运载平台后撤,远离防区发射小型无人机群,小型无人机以分散部署的方式进入外围防区执行任务。这种分布式的作战模式,一方面有人平台的安全性得到保证,另一方面无人平台任务成本低,任务执行效能更高。
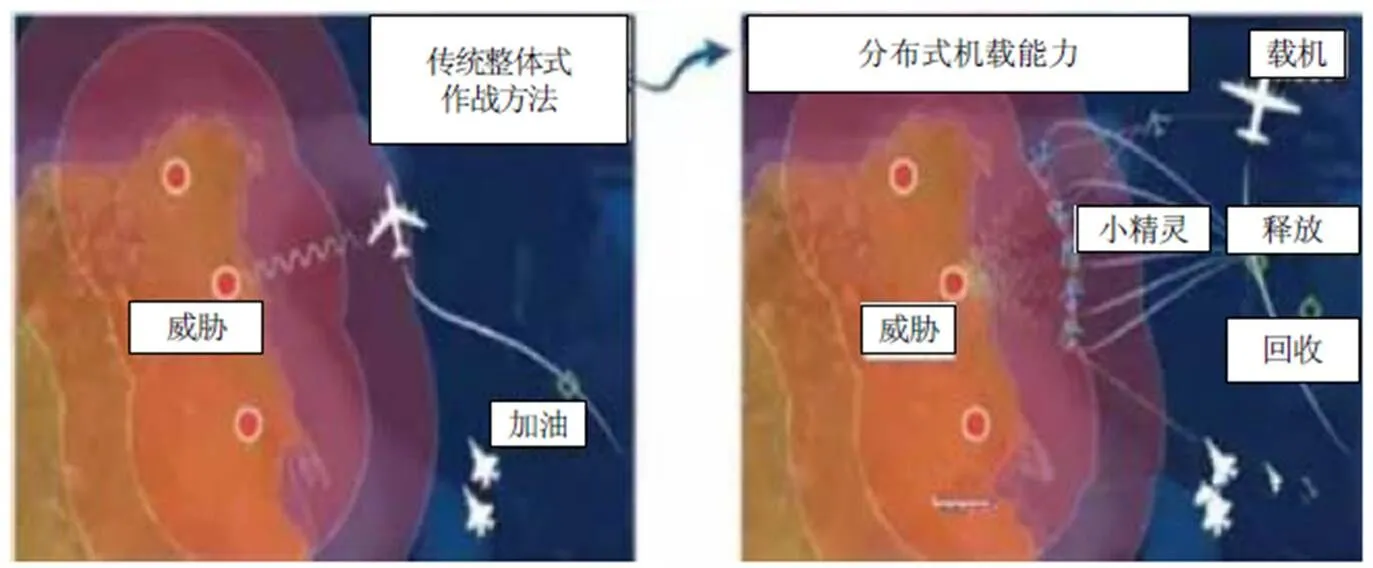
图1 小精灵作战模式
在强电磁对抗性空域中,无人集群由于链路受限,其协同效能将受到极大影响,小精灵项目采用多个8机小规模编队以及定向链路提升抗干扰能力。受限于定向链路,小精灵难以扩大网络规模,目前主要应用于电磁环境感知任务,未来更加复杂、需要更大规模的协同任务则受到很大限制。
2)CDMaST
CDMaST项目面向海上作战,其理念是把集中式的作战能力拆解、分散到大量低成本系统上,新型的反舰导弹与水下武器系统将大幅提高打击的范围和速度,低成本卫星、海底预置系统、无人系统与有人平台结合提供新型武器所需的监视与瞄准信息,通过将各型系统整合进一套协同网络形成作战体系,能够对敌方舰船和潜艇进行广域、跨域的监视、瞄准及打击,充分体现了体系(System of System,SOS)的理念,如图2所示。
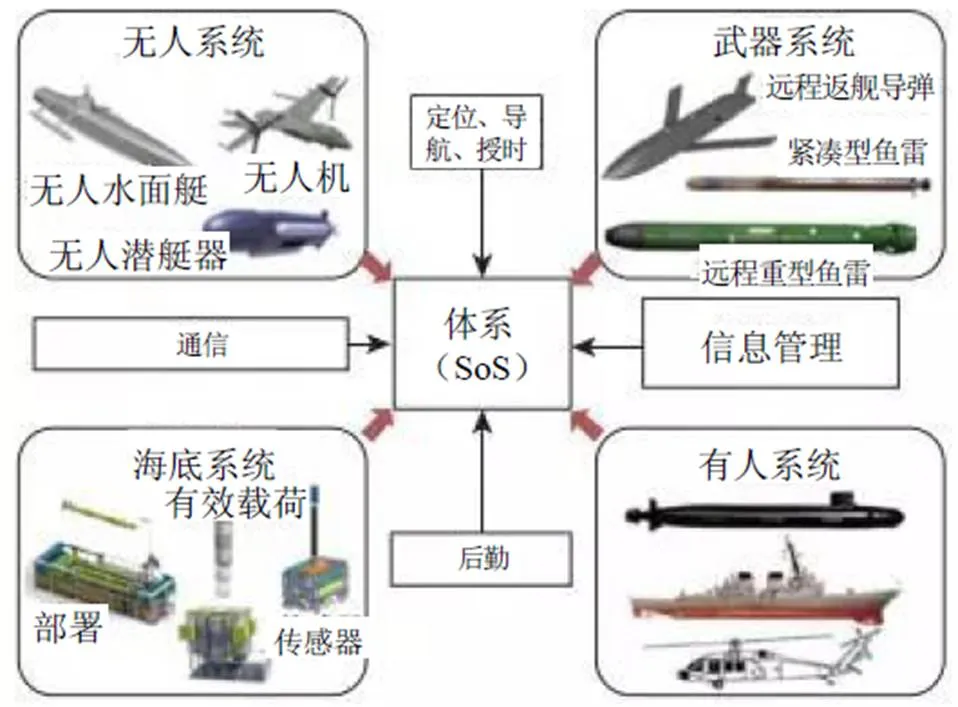
图2 CDMaST项目的作战体系示意图
CDMaST项目充分体现了美军的散系化思想,即通过将作战能力化整为零,作战力量分散部署,弱化平台的中心地位,以信息、火力的集成作为作战力量的核心,试图解决困扰集中式系统发展的瓶颈,是网络中心战的具体形式和抓手。
1.2 关键技术分析
大规模无人机集群通过构建多个任务子网完成复杂任务的分解和协作,集群构建子网的能力直接约束了集群任务的达成。现阶段大规模(200架以上)无人机集群主要通过预先配置的子网簇头节点进行子网间通信及子网任务管控,但随着集群规模的进一步扩大,簇头节点的选择切换及分簇构建将更加复杂,预先配置无法满足战场高动态环境的需求[8]。
无人集群在执行任务过程中,首先由于高速机动、自主避障、任务规划等因素,节点间相对位置变化频繁。同时在强对抗环境下,链路受限,节点存在被杀伤的可能,传统的预先分层分簇策略,簇头更替、簇间切换都会成为影响网络可靠性和安全性的潜在风险。当网络动态性增强时,拓扑结构无法快速随着节点变化而更新,需要簇头先进行更替,形成新的逻辑簇;当网络运行过程中簇头被攻击造成掉线,替补簇头的构建效果会极大影响整个网络性能[9,10]。对于无人集群采用扁平化动态对等的网络结构,有助于无人集群在对抗环境下执行任务,扁平化对等网络节点网络职责高度一致,能够良好地适应高动态网络环境。同时,对节点攻击失效有极强的容错能力,有效增强网络的可靠性和安全性。然而扁平化结构下如果网络要多跳互联,则网络拓扑和路由开销增加迅速,会极大地挤压业务信息的网络资源。
2 无人机集群动态分簇策略
2.1 现有分簇策略的问题
大规模无人机集群可通过分簇形成多个任务子集群,通过多个子集群之间的协作完成复杂任务。当任务和环境变化时,集群应当能够动态进行分簇调整从而适应任务和环境变化。
静态预先分簇只能适应单一任务的情况,而现有的动态分簇方法以一定时间内的拓扑中心或者网络连接度等进行分簇,下一个时间段重新进行分簇,这种方法对于非高动态的无人传感器集群网络具有良好效能,然而无法满足无人机集群高动态拓扑快变的特点。采用现有分簇方法无人机集群运动过程中管理节点不能保证链路可靠的推送分簇计算信息,同时无法根据任务灵活动态分簇,在动态环境下,不能满足拓扑变化的需求,最终将极大影响无人机集群遂行任务的效能。因此传统的大规模分簇技术对于高动态无人机集群不具有可行性。
2.2 集群动态分簇策略
本文针对无人机集群运动特点,提出一种集群动态分簇策略,描述如下:


3)在场函数作用下,集群中心如式(3)所示:

4)以收敛时间为最小目标函数,其他节点加入簇的期望约束位置如式(4)所示:
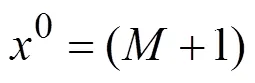


分簇流程如图3所示。
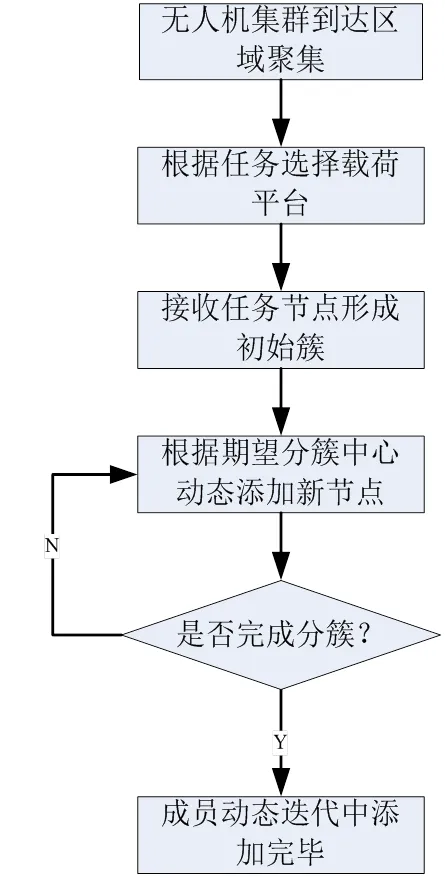
图3 动态分簇流程
集群动态分簇策略主要解决了两个问题:
1)现有分簇方法采用静态拓扑为主要依据,适用于动态性不强的传感器集群网络,不能适应高动态的无人机集群网络。本发明在集群运动过程中,以收敛时间为最小目标函数,在动态条件下完成高效分簇。

以300架规模的无人机集群仿真为例,无人机集群到达空域后,形成集群系统,处于待分簇状态。集群中的个体按照地面预先规则或者起飞顺序标记为第个个体。分簇发起节点可为集群网络中任意接收到任务的节点,如果有多个接单同时接收到相同任务,则编号最小的节点成为分簇发起节点。分簇发起节点即簇首节点根据已存储的无人机节点载荷信息,形成包含20个节点的候选簇内节点集合,在集合内首先选择距离簇头最近的2个节点发送分簇指令。接收到分簇指令的节点,自主按照上述运动方程进行运动。
图4 动态分簇效果示意图
3 大规模集群高效路由策略
3.1 现有路由策略的问题
目前在互联网领域主要采用专用路由器,通过IP地址映射形成路由表,以查表的方式完成路由转发。与互联网不同,自组网Ad hoc路由策略主要分为表驱动和按需驱动两大类型,表驱动协议通过定期交换路由信息分组,每个节点维护一张或者多张路由表,记录到其他节点的路由信息。采用表驱动路由协议的节点需要周期性通过额外的路由开销形成路由表,并定期进行维护,及时更新。表驱动路由类似互联网领域中的路由器,业务类消息一旦到达可直接查询路由表发送,排队等待时延较小。
Ad hoc网络中的另一大类为按需驱动路由。按需路由在业务产生之前并不周期性维护路由,当节点业务产生需要发送时,动态构建路由表。通过一个泛洪的路由请求路由应答过程,形成一条临时路由进行发送,建立路由后只进行简单的维护,当时效期过了之后,路由自动删除。按需驱动的路由协议开销较小,主要跟业务强关联,只有在有业务需要发送时才带来一定开销。适合于业务产生随机性强,但总体业务量不大的网络。按需驱动路由策略的缺点是业务需要临时构建路由,故排队调度的等待时延较大。现有的主要路由协议如图5所示。
大规模无人机集群采用扁平化对等网络架构,路由策略会随着节点规模增加开销迅速增加,挤占业务带宽,如图6所示。
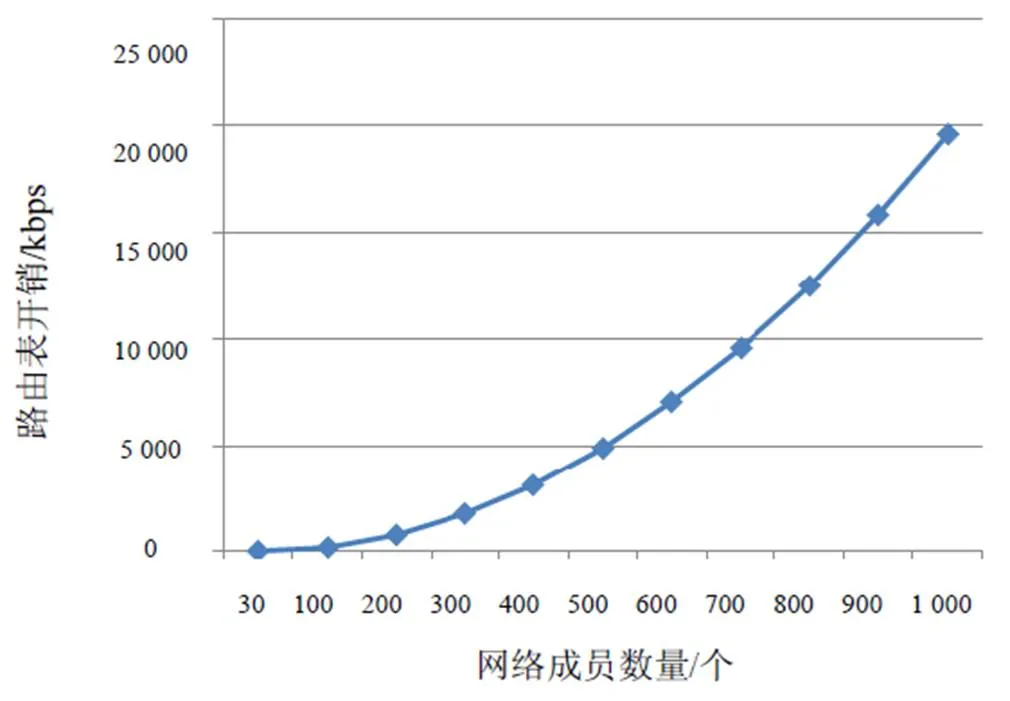
图6 目的节点距离矢量路由策略路由表开销
Ad hoc路由策略通常面向50个网络成员以下的小规模无线场景,当节点规模增加时,采用分层分级策略进行路由控制,其中,分层的转发节点承担层间路由功能,层内节点不能直接与其他层的节点通信,从而降低路由算法实际的网络成员数量。当网络成员继续增加时,则进一步通过分级方式对网络进行分割。
采用分层分级策略的弊端是,当网络动态性增强时,分层会造成拓扑结构无法快速随着节点变化而更新,需要分层管理节点和转发节点进行更替,形成新的逻辑层;当网络运行过程中关键管理节点被攻击造成掉线,会极大影响整个分层网络性能。无人集群在执行任务过程中,首先由于高速机动、自主避障、任务规划等因素,节点间相对位置变化频繁。同时在强对抗环境下,链路受限,节点存在被杀伤的可能,采用分层分级策略后,频繁拓扑变化、层间切换都会成为影响网络可靠性和安全性的潜在风险。
对于高动态无人机集群,扁平化网络结构更为合适,扁平化结构中节点职责对等,具有很强的互替代性,拓扑管理或者路由管理职责能够便捷地转移;同时当部分节点受到攻击时,其余节点能够通过快速拓扑动态调整消除掉攻击造成的部分网络影响,最大化保证任务遂行。但是扁平化网络结构中由于路由构建和维护需要在一定范围内广播状态消息,造成了较高的路由开销,成为约束扁平化网络规模的最重要因素。
3.2 基于位置矢量更新的集群高效路由策略
传统的路由更新策略无法适应大规模无人机集群高动态扁平化网络的需求,本文针对大规模扁平化对等网络路由开销急剧增加的问题,提出一种大规模高效路由更新策略,描述如下:
基于位置矢量更新策略的大规模无人机集群高效路由是在节点运动状态改变时通过更新移动矢量信息来“拟合”当前节点的运动状态。用移动矢量信息结合原位置信息计算出当前时刻节点位置,用当前时刻位置计算出拓扑。
1)节点入网后首先在非快速运动状态分发自己的位置信息,与1跳邻居形成邻居列表位置信息后,继续形成全网(3跳)范围节点位置矩阵,形成集群初始化位置矩阵。
2)节点开始移动后,发送节点速度矢量信息,全网形成速度矢量信息矩阵;当节点速度矢量变化时(方向以及速度),则发送移动矢量修正信息,信息扩散至全网后:
(1)修正每个节点维护的全网移动矢量矩阵;
(2)之后采用修正后的全网移动矢量矩阵去修正全网位置矩阵;
(3)再通过位置矩阵计算路由表,形成按上述方法形成全网移动矢量矩阵。
3)节点保持移动过程中(移动矢量不变化),节点本地实时通过移动矢量矩阵修正位置矩阵,修正的位置矩阵采用最短路径策略计算出路由表进行业务分发。
4)当节点重新进入保持移动状态后,发送位置信息,修正计算过程的系统误差。
采用位置矢量路由更新策略能够极大减小路由的更新频次。大规模无人机集群是面向特定任务组网,具有较大程度的组移动特性,即无人机分簇后,一簇内的节点具有相似的运动模式,如快速直线低近目标区、围绕目标区环绕飞行、躲避机动飞行等,可以充分利用无人机集群组移动的特点,通过运动变化时进行信息更新,各节点计算邻居节点与自己的大致相对位置,并基于相对位置拓扑构建和更新路由。
大幅减小路由更新频次在大规模组网条件下(300节点以上)能够明显降低路由开销,位置矢量路由策略与目的节点距离矢量路由策略的开销对比如图7所示,图(a)为累计开销,图(b)为瞬时开销。由图7两图可以看出,位置矢量路由策略大规模场景下开销能够减小50%以上,能够节约大量网络资源用于业务保障。
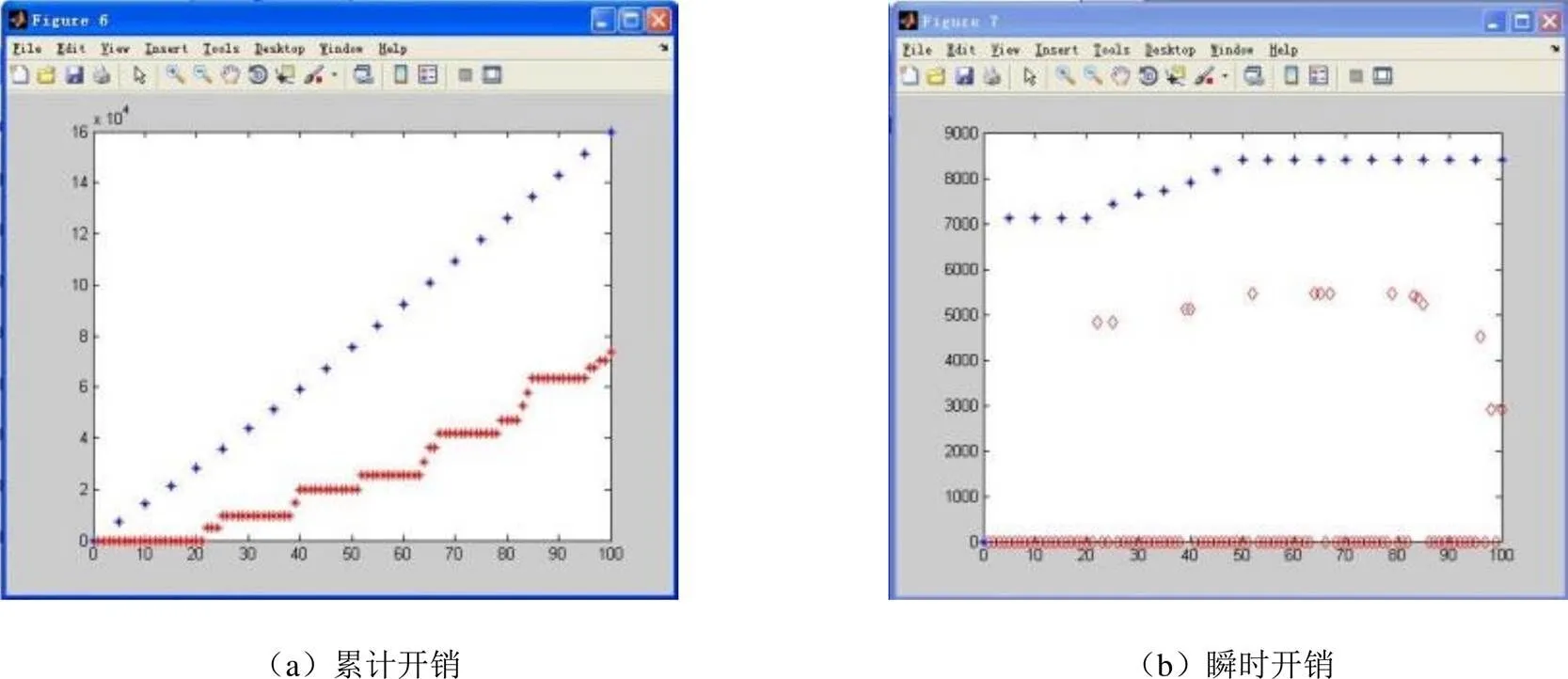
图7 位置矢量路由策略与目的节点距离矢量路由策略开销对比
4 结语
本文总结了大规模无人机集群网络的挑战和难点,在现有自组网技术的基础上提出一种无人机集群动态分簇策略,能够良好地适应动态运动环境;同时提出了一种面向大规模无人机集群协同运动的位置矢量路由策略更新策略,能够大幅降低路由开销,节省网络资源,提升集群网络对任务的服务保障能力,为无人机集群未来多种协同应用发展提供支撑。
[1] 张帆. 无人机集群作战应用卫星导航差分定位技术研究[J]. 现代导航,2019(3):157-162.
[2] 梁晓龙,孙强,尹忠海,等. 大规模无人系统集群智能控制方法综述[J]. 计算机应用研究,2015,32(1):11-16.
[3] 邹立岩,张明智. 马赛克战视角下的智能无人机集群作战概念研究[J]. 战术导弹技术,2020(204):67-74.
[4] 王祥科,刘志宏,丛一睿,等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报,2020,41(4):20-45.
[5] E.Bonabeau,M.Dorigo,G.Theraulaz. Swarm Intelligence:From Natural to Artificial Systems[M]. New York,Oxford University Press,1999.
[6] Zhao R,Lee H K. Fuzzy-based Path Planning for Multiple Mobile Robots in Unknown Dynamic Environment[J]. Journal of Electrical Engineering & Technology,2017:641-653.
[7] G. Xylomenos,C. N. Ververidis,V. A. Siris,et al. A survey of information-centric networking research[J]. IEEE Communications Surveys and Tutorials,2014,16(2):1024-1049.
[8] M Achankunju. Particle swarm optimization based secure Qos clustering for mobile ad hoc network[J]. International Conference on Communications & Signal Processing,2013:237-242.
[9] C. Xu,H. H. Yang,X. Wang,et al. Optimizing information freshness in computing-enabled IoT networks[J] IEEE Internet of Things Journal,2020,7(2):971-985.
[10] B. Zhou,W. Saad. Joint status sampling and updating for minimizing age of information in the Internet of Things[J]. IEEE Trans. Commun.,2019,67(11):7468-7482.
Research on Dynamic Network Technology of Large-Scale UAV Cluster
WANG Lu
To suit the requirement of network service of large-scale UAV cluster, a dynamic clustering strategy and a dynamic routing strategy for large-scale cluster are designed. It improves the service efficiency of self-organizing network for large-scale cluster and support the future diversified cooperative operation of clusters.
UAV Cluster; Dynamic Clustering Strategy; Routing for Large-Scale Cluster
E91
A
1674-7976-(2022)-05-357-06
2022-08-24。王露(1984.09—),陕西西安人,工程师,主要研究方向为数据链总体技术。