GBAS飞行测试仿真验证
2022-11-08刘瑞华
刘瑞华,刘 畅
GBAS飞行测试仿真验证
刘瑞华,刘 畅
(中国民航大学电子信息与自动化学院,天津 300300)
地基增强系统(GBAS)能够弥补传统导航系统的诸多缺陷。为了评估GBAS系统的导航性能和系统性能,验证GBAS进近服务在不同运行条件下的总体性能,通常需要展开相应的飞行测试。考虑到GBAS飞行测试需要结合特定的测试设备和运行环境来进行,过程一般十分复杂。在实验室环境下,结合Flight Gear和Matlab软件,采用仿真数据代替实测数据,仿真验证GBAS系统的I类精密进近(CAT I)与着陆阶段所需导航性能(RNP)。仿真结果表明,GBAS系统可以满足CAT I进近和着陆的性能要求,能够为基于北斗的GBAS技术在民航领域中的推广提供解决方案。
地基增强系统;飞行测试;进近着陆
0 引言
一种以全球卫星导航系统(Global Navigation Satellite System,GNSS)地基增强系统(Ground-Based Augmentation Systems,GBAS)为导航基础的进近和着陆系统(GNSS Landing System,GLS)是利用GBAS进行增强和引导的新一代飞机进近着陆系统[1]。随着BDS-3卫星导航星座组网完成,有必要对北斗在民航领域的推广及应用进行深入研究。本文在实验室环境下,利用相关仪器设备和计算机软件,从理论仿真验证的角度出发,围绕民用航空器在I类精密进近(Category I Precision Approach,CAT I)与着陆中的相关性能指标,对GBAS系统性能进行理论分析和相应的仿真测试验证。
目前,国外基于GPS的CAT I 进近和着陆的研究已基本成熟,正积极开展支持CAT III认证工作[2]。国内为了克服传统导航和仪表着陆手段受限的局面,正积极开展对GBAS精密进近的性能研究,支持I类精密进近的GBAS设备已在多地机场安装运行,支持II、III类精密进近的GBAS设备和标准正在开发验证中。文献[3]从进近及着陆的国际标准出发,提出了一种兼容不同导航系统的GBAS进近着陆定位算法,此算法兼容北斗和GPS系统,为飞行试验提供了参考依据,但缺少严格的模拟仿真试验。文献[4]验证了系统精度和完好性,通过验证GBAS增强算法在单、双星座环境下的系统性能,表明双星座联合互操作是提高GBAS系统性能的有效手段,但是实验缺乏对仿真条件的进一步设置。文献[5]将GBAS算法与双频GNSS算法相比较,结果能够达到CAT III的精度要求,但其定位性能还有待提高。
本文首先对GBAS系统构成和工作原理进行简要介绍,根据标准中对GBAS I类精密进近的系统性能和导航性能要求,详细阐述了GBAS涉及到的增强算法;其次,结合GBAS运行原理,由Matlab完成数据处理的解算,建立与Flight Gear联合仿真测试方案,完成GBAS引导进近着陆航段的模拟,利用Simulink搭建3D视景显示界面,并对地面基准站布设方式进行介绍;最后,根据不同条件下的测试环境,对导航信息、系统功能、导航性能进行分析,实现对GBAS系统性能和导航性能的仿真评估,为GBAS I类精密进近导航技术的进一步发展提供技术参考。
1 GBAS关键技术研究
GBAS系统由三部分组成:卫星、地面和机载子系统。GBAS作为一项支持进近和着陆导航阶段的新技术,需要较为全面地对其性能、功能展开测试,RTCA DO-245A[6]中对GBAS I类精密进近性能要求的规定如表1所示。

表1 精密进近阶段精度和完好性要求
注:① 1英尺=30.48 cm;② V代表垂直方向;③ L代表水平方向
1.1 GBAS系统性能测试仿真验证原理
1.1.1 差分增强技术
GBAS的核心要素是差分技术,该系统使用本地差分技术来解决传统卫星导航系统定位精度不足的缺点[7],实现飞机的精密进近。GBAS定位解算过程如图1所示。
将基准接收机的位置和测距源的瞬时位置做差即可计算出地面到测距源的距离,如式(1)所示:




如果机载接收机接收到超过四个修正的伪距测量值时,则可以在最小二乘法中使用线性模型计算飞机的位置。

图1 GBAS差分定位原理框图
1.1.2 完好性增强技术

由于在GPS中核心星座的几何结构变化会造成性能随之变化,为了评估机载端完好性风险,引入“保护级”概念并和相应的告警门限对比,及时预警[8]。
垂直/横向保护级(Vertical/ Lateral Protection Level,VPL/LAL)算法如式(5)所示:
1.2 GBAS导航性能测试仿真验证原理
对单架飞机和系统而言,飞机在预期航路的飞行能力要满足基于性能的导航手册中所定义的导航性能需求。根据系统的导航需求确定GNSS系统的品质因数(Figure of Merit,FOM)要求和速度精度要求。
1.2.1 FOM
FOM是描述GBAS机载位置与导航(Position And Navigation,PAN)设备性能的重要指标[9]。GBAS机载设备为每个PVT输出计算信号所在空间的FOM,用于监测输出位置误差是否满足导航系统精度(95%)的要求。
品质因数分为水平位置品质因数(Horizontal Vertical Position Figure of Merit,HFOM)和垂直位置品质因数(Vertical Position Figure of Merit,VFOM),计算公式如式(9)所示:


1.2.2 速度精度
速度精度包括水平速度精度和垂直速度精度,GBAS机载设备遵循如式(11)所示的算法计算速度精度统计量:
当北斗可见星能提供≤1.5水平精度因子(Horizontal Dilution of Precision,HDOP)时,水平速度精度统计量如式(13)所示:
当北斗可见星能提供≤3.0垂直精度因子(Vertical Dilution of Precision,VDOP)时,垂直速度精度统计量如式(14)所示:

2 GBAS系统测试验证平台
2.1 验证平台的建立
试验围绕BDS地基增强系统和基于Flight Gear飞行仿真软件性能进行视景仿真,制定数据交互式性能方案,GBAS测试的系统方案如图2所示[10]。
在Flight Gear与Matlab联合仿真时需借助Simulink建模、分析和仿真实现各种动态环境,帮助用户快速地建立图形化交互环境。Flight Gear与Matlab对接过程如图3所示。在进近着陆时,将航路信息输入给Flight Gear,通过模拟飞行器加载,飞机由多模接收机(Multi Mode Receiver,MMR)设备引导按照既定的飞行程序进行飞行校验,生成飞机下降的视景仿真过程。
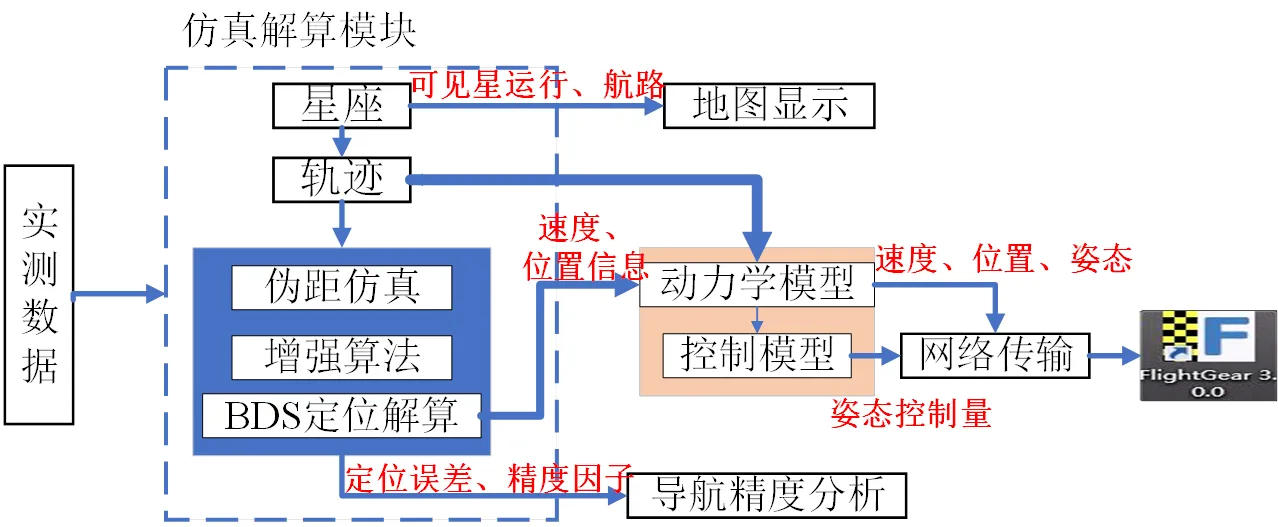
图2 GBAS测试验证方案框图
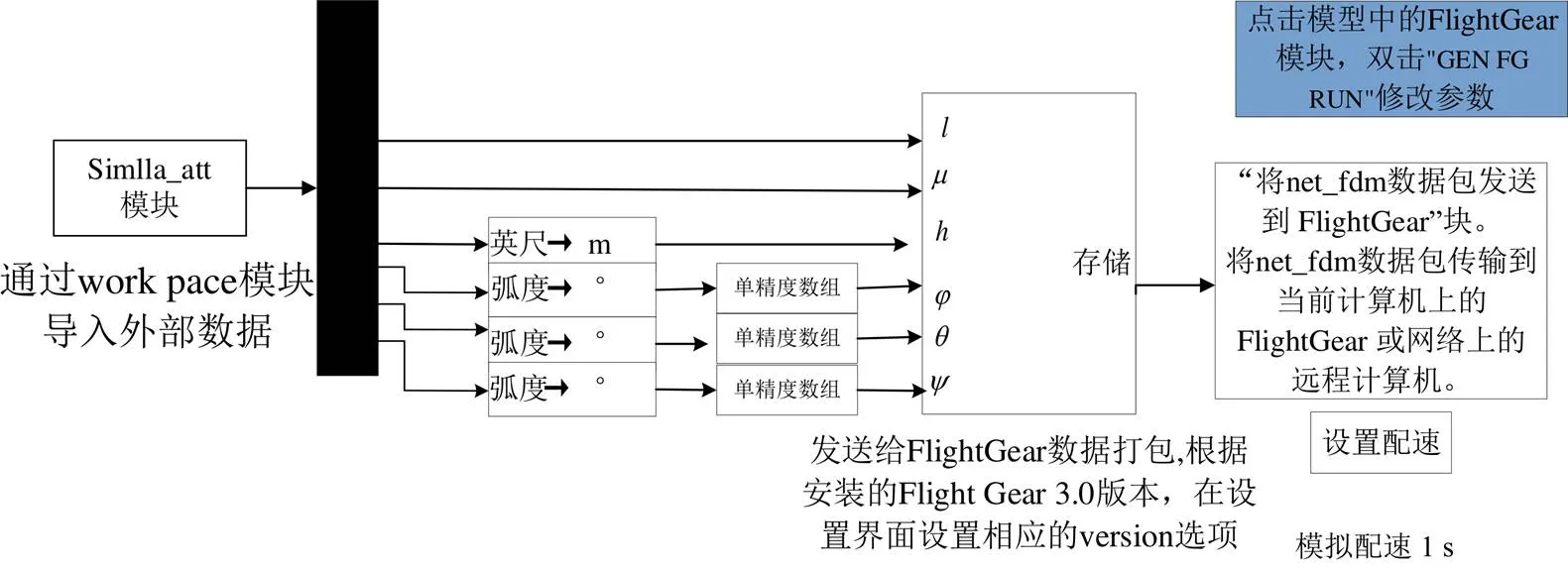
图3 Simulink对接过程
2.2 地面基准站选址方法
在设计飞行测试方案时要考虑的一个重要的问题就是地面参考站的位置,典型的参考站配置平面图有“方形”和“交错型”[11],本文设定的方形基准站如图4所示。
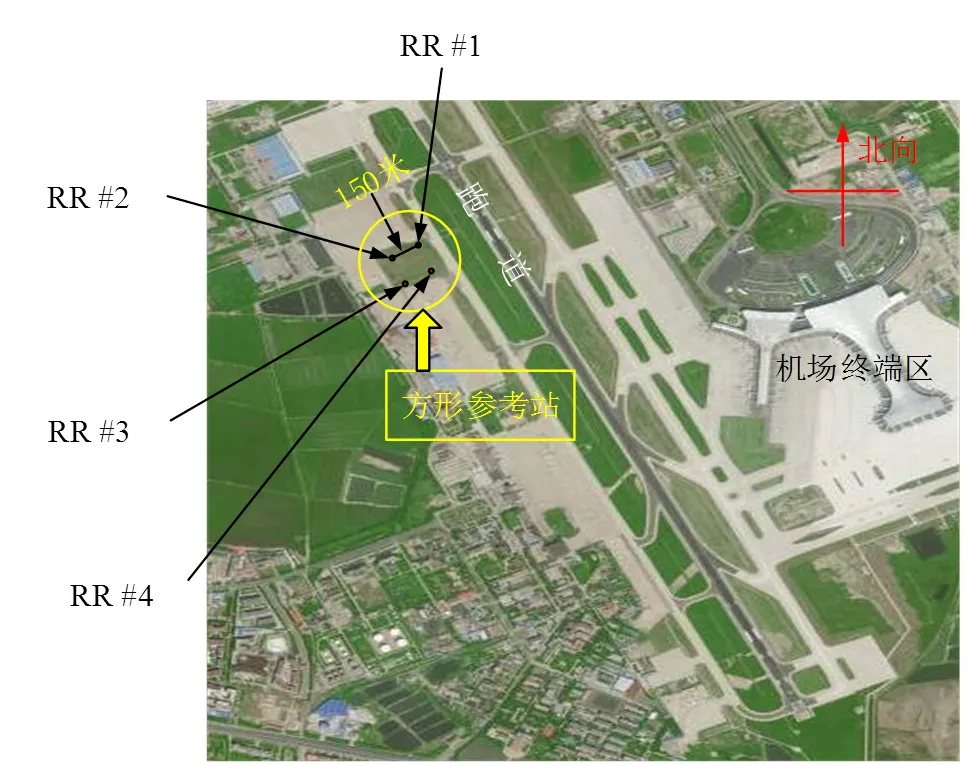
图4 地图参考的方形基准站布局
3 GBAS仿真测试校验
3.1 可见星仿真
为验证终端区系统性能,以基准站中心点为参考,采用第782周BDS历数数据进行仿真验证,仿真开始时间为2021年5月20日8时,仿真中观测点设定为天津滨海国际机场附近(39.112°N,117.344°E),卫星高度角选取为5°,选择可见星和精度因子(Dilution of Precision,DOP)值作为分析指标[12],分析BDS性能,仿真结果如图5和图6所示。
根据仿真结果,1天内可见星数目最多为25颗,最少为15颗,满足基本的定位要求;且值波动集中在0.4~1.4 m之间,卫星几何架构分布良好。
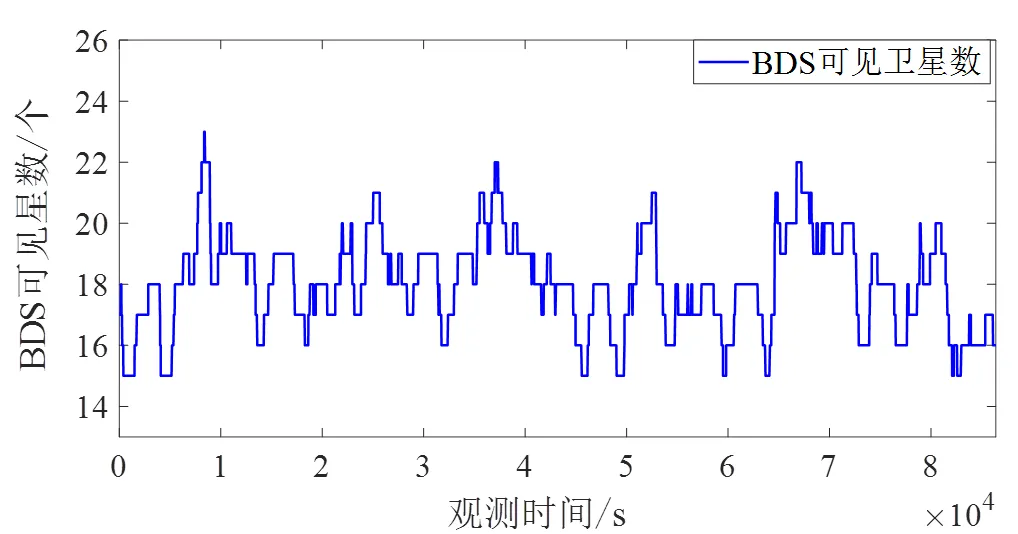
图5 BDS可见星数目
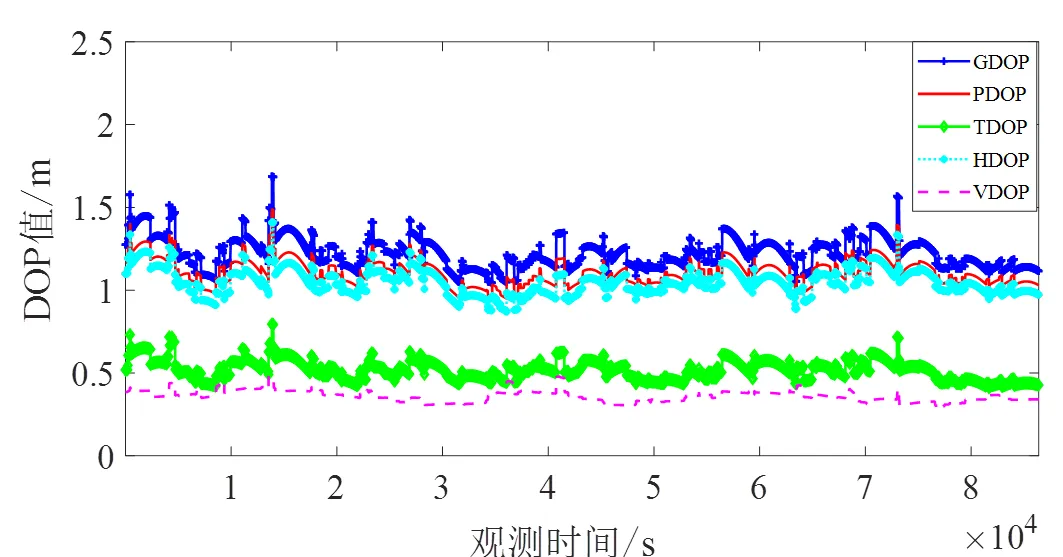
图6 几何精度因子变化曲线图
3.2 仿真模型与仿真轨迹
通过对甚高频数据广播(VHF Data Broadcast,VDB)消息体系的解析,利用Flight Gear模拟飞行器中客机的模型并参考天津滨海国际机场34L跑道的信息,由固定坐标点:着陆入口点39.111°N,117.356°E(3.7 m)、最后进近点39.215°N,117.299°E(600 m)以及对齐跑道中心点39.147°N,117.358°E(3.7 m)所确定的3°的理想下滑,用作测试GBAS系统性能和导航性能的参照对象。
模拟仿真环境下飞行高度阈值为600 m,实际飞行速度为150 m/s,从350 m处完成进近着陆过程,进近着陆飞行过程中的部分截图如图7所示。

3.3 GBAS系统性能仿真评估
3.3.1 载波相位平滑伪距差分定位仿真
静态仿真以3.2节所生成的理想下滑道[0,0,0]点作为静态观测点,采样时间24 h,仿真步长100 s,共计864个样本。GBAS机载接收机和地面基准接收机均选用A类接收机。在动态仿真场景下,飞机按照MMR设备的指令,依据GBAS设定的飞行测试方案,沿着航迹动态飞行。
静态和动态场景下,经过载波相位平滑后各个方向的定向误差与仿真时序的关系图分别如图8和图9所示,并对比不同定位方式的定位误差。
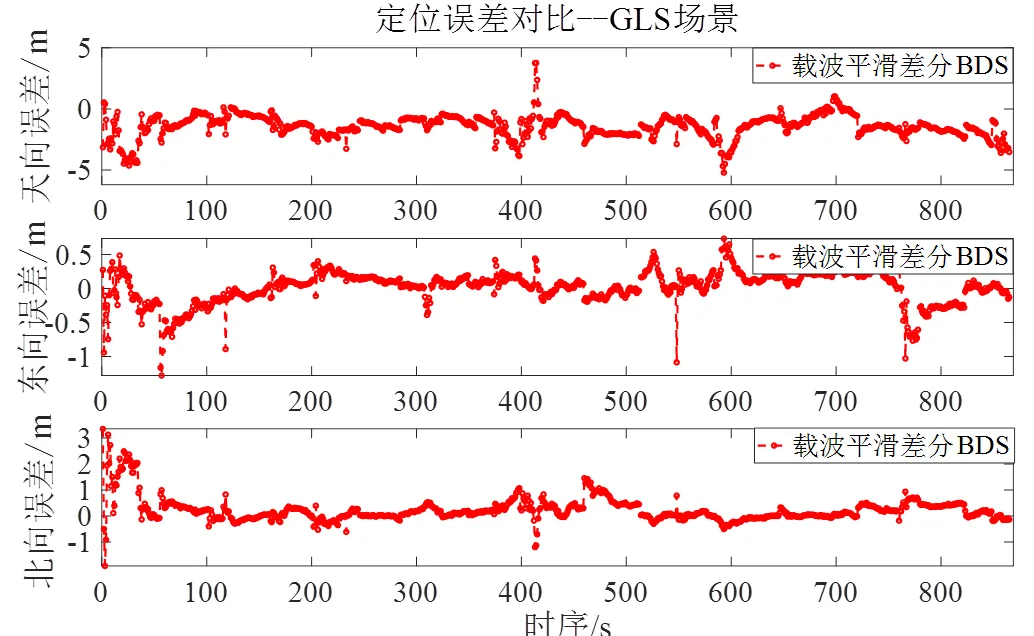
图8 静态场景定位误差
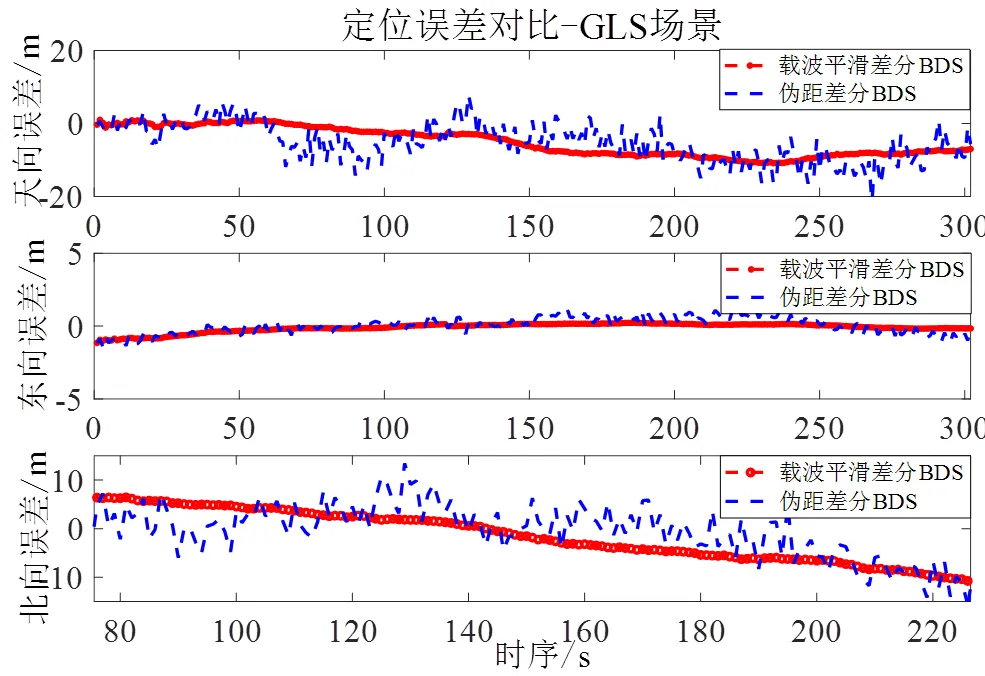
图9 动态场景定位误差
GLS进近场景3D定位轨迹比较如图10所示,相应误差区间如表2所示。
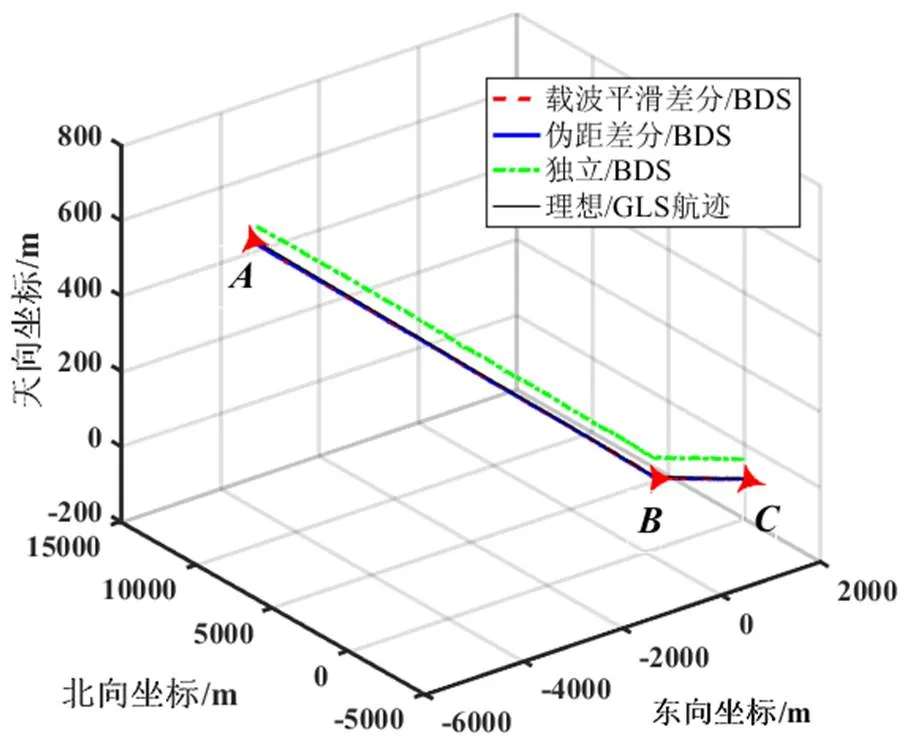
图10 定位轨迹比较

表2 定位误差区间表
从图8和图9中可以看出,在静态和动态仿真场景下,经过载波相位平滑后的东北天向误差分布较为集中,其中天向误差变化在-4~+4之间,变化幅度较大,但在误差阈值以内,说明满足I类精密进近;从图10可看出载波相位平滑伪距定位、伪距差分定位、独立定位三种定位方式的定位误差,其中载波相位平滑伪距定位的轨迹更接近理想GLS航迹,同时,结合表2可分析出,载波相位平滑伪距差分定位误差波动较小,定位效果最好。
3.3.2 机载端完好性监测仿真

静态仿真场景下,机载接收机接收测距信号计算的保护级结果如图11和图12所示,其中将机载端LAL与VAL检测门限一并标出。从图11和图12可看出,基于BDS的增强系统进行GBAS引导时,满足I类精密进近要求。
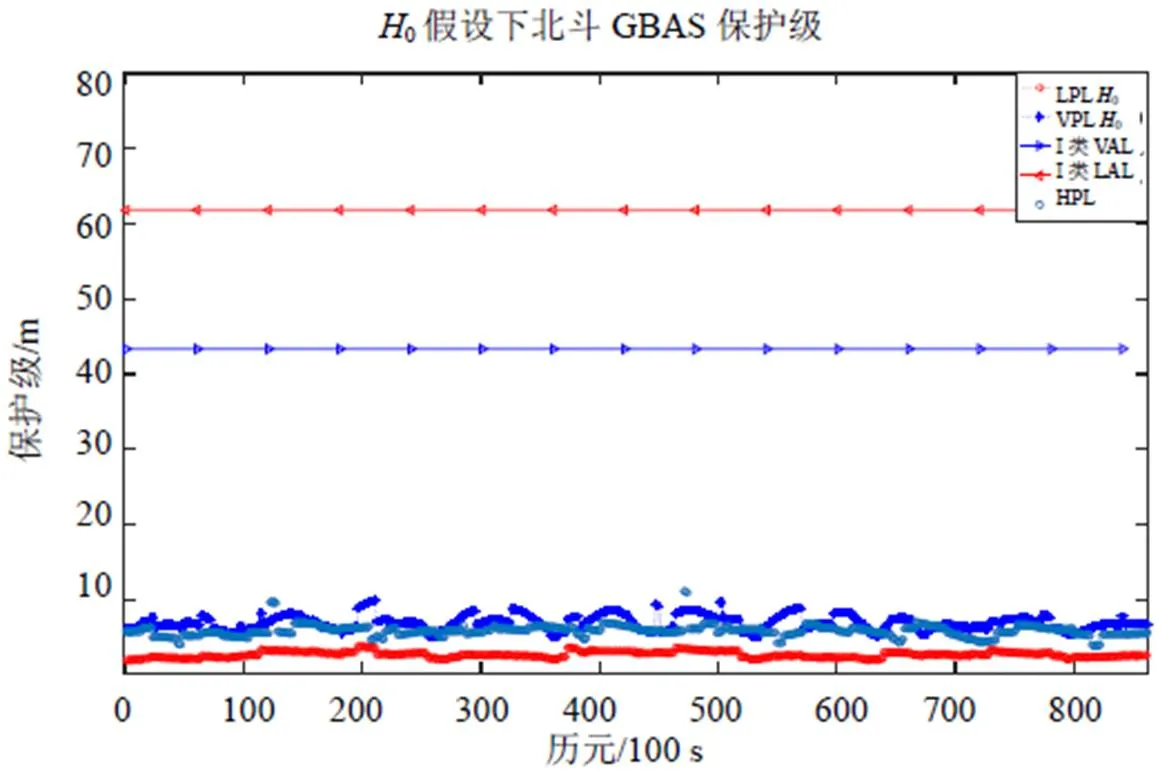
图11 静态场景假设下保护级变化曲线
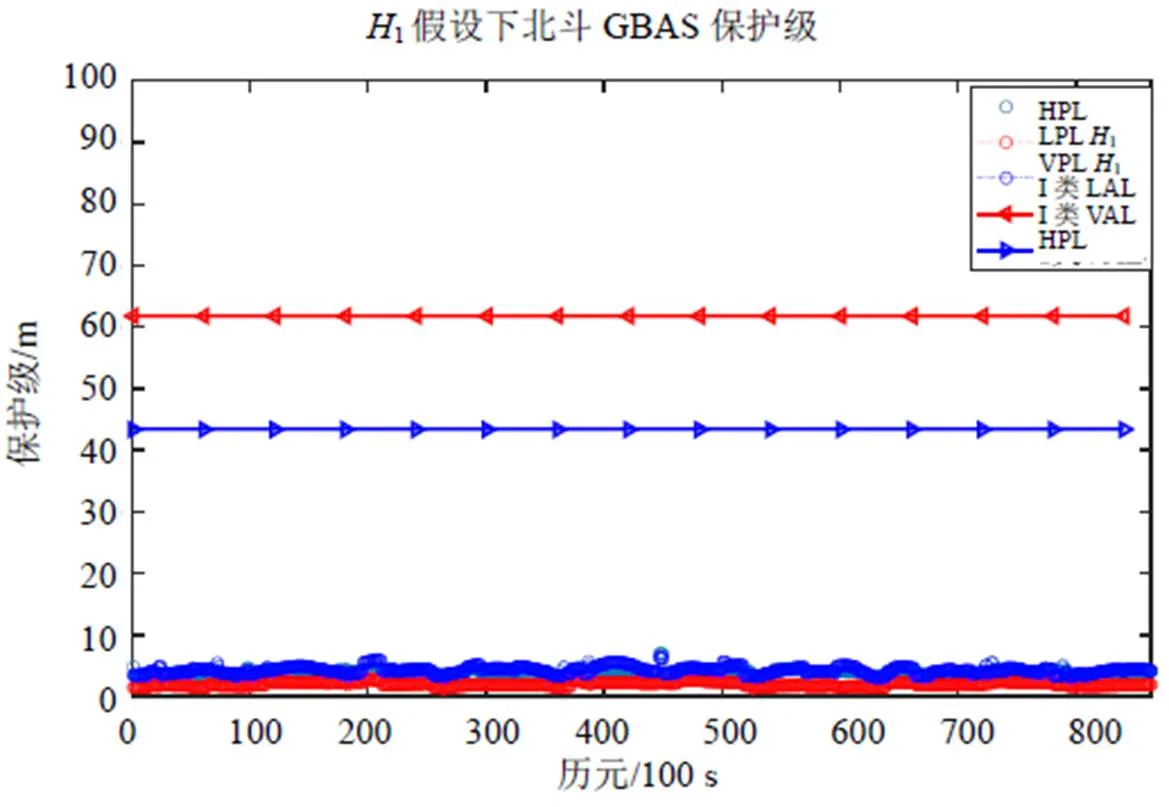
图12 静态场景假设下保护级变化曲线
由图13和图14中LAL与VAL阈值变化曲线可以看出,随着飞机与着陆入口点和对齐跑道中心点的距离逐渐减小,相应告警阈值逐渐降低;且每一时刻横向、垂直和水平保护级分别与相应的告警门限值进行比较,均小于相应阈值,说明在动态仿真测试环境中进近服务和定位服务中满足I类精密进近的完好性要求。
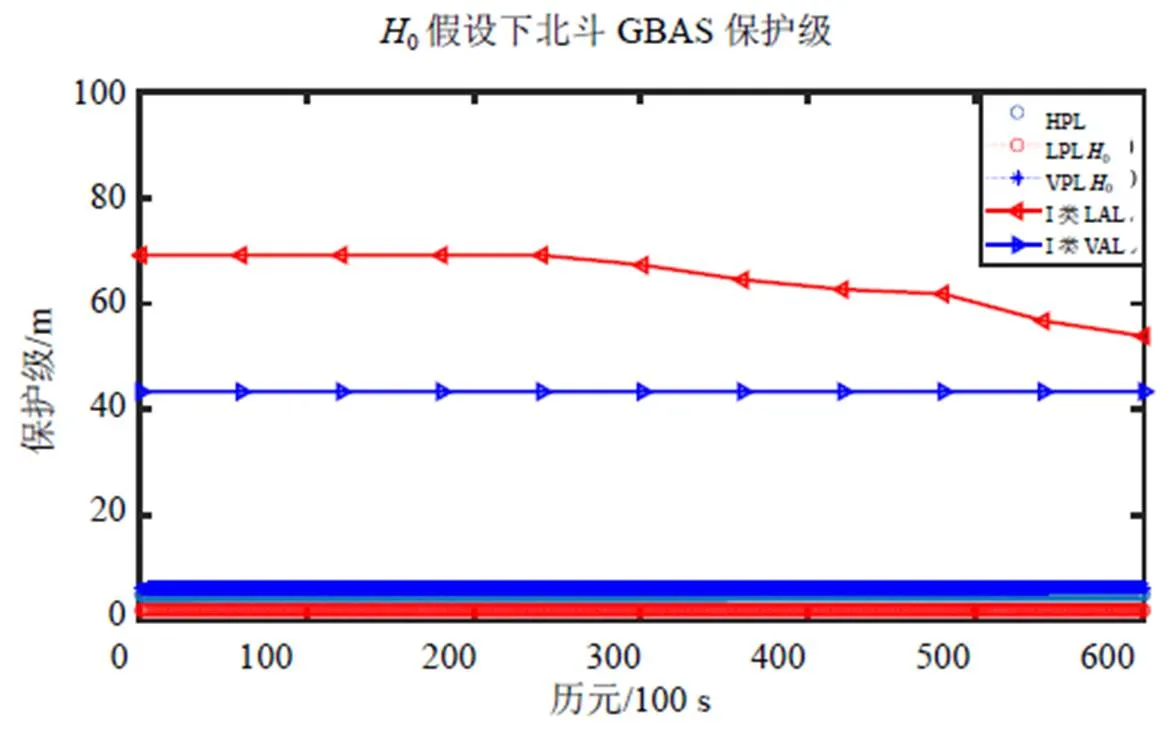
图13 动态场景假设下保护级变化曲线
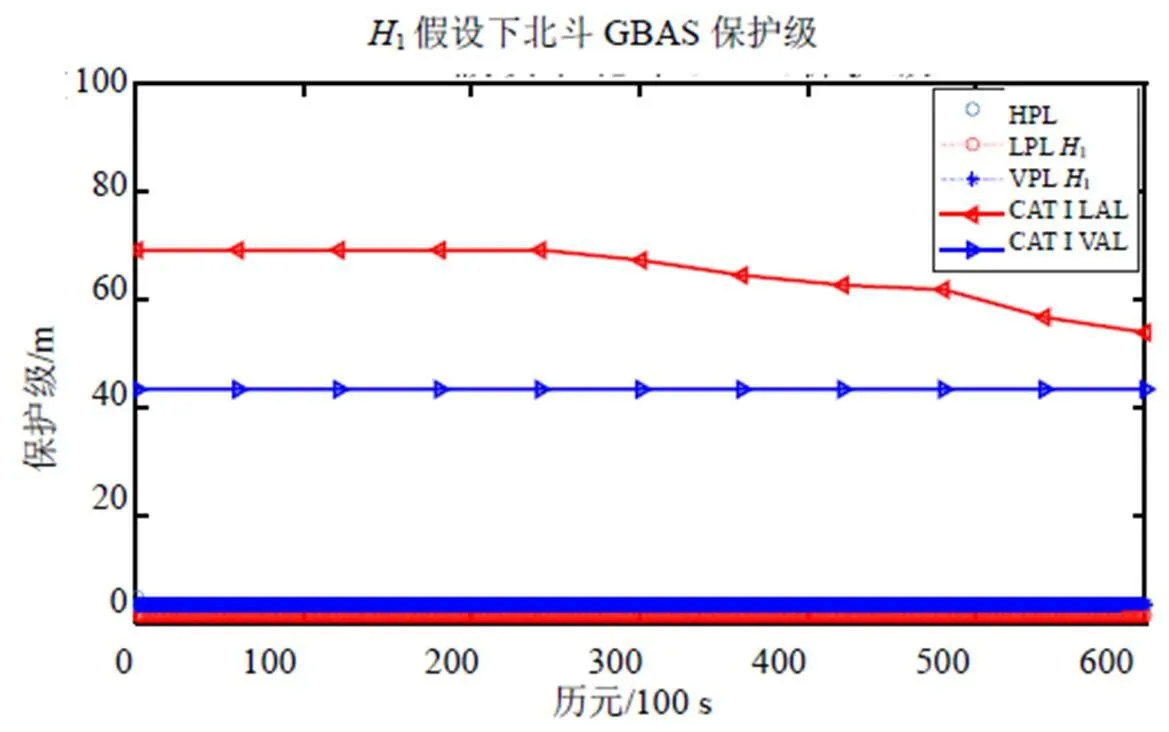
图14 动态场景假设下保护级变化曲线
3.4 GBAS导航性能仿真评估
3.4.1 品质因数仿真
当飞机沿着理想航迹进行动态飞行时,机载接收机品质因数实时变化曲线如图15所示。
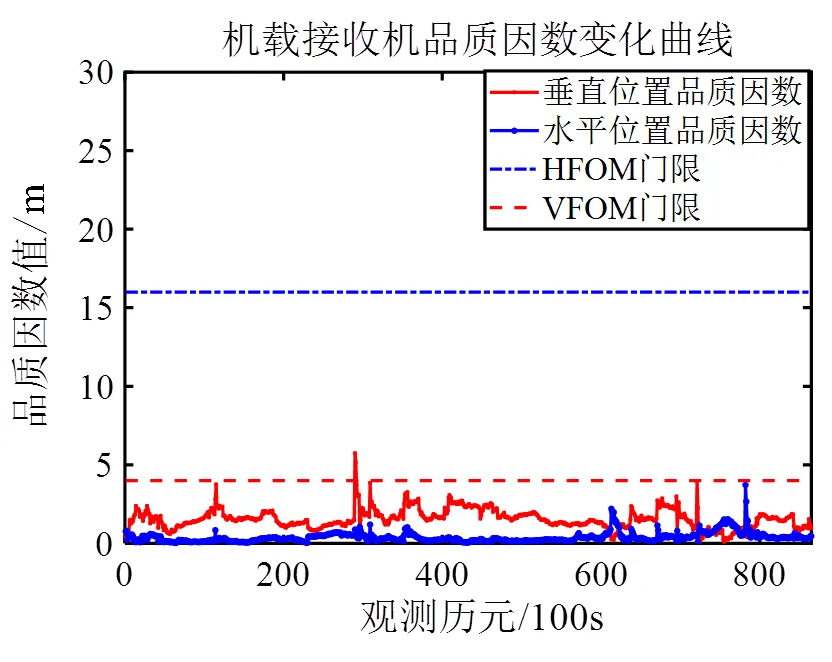
图15 机载接收机品质因数变化曲线
将HFOM和VFOM不同时刻值的误差和告警门限进行比较,VFOM波动曲线大体分布在5 m以下,HFOM变化较为平稳。根据变化曲线可以看出均小于I类告警门限。
3.4.2 速度精度仿真
为实现对飞行过程中速度精度的仿真,以ICAO定义的飞行阶段为基础,根据飞机完整的飞行过程,对爬升飞行阶段、水平飞行阶段和下降飞行阶段的飞机速度进行仿真模拟,具体的机动过程如图16所示。
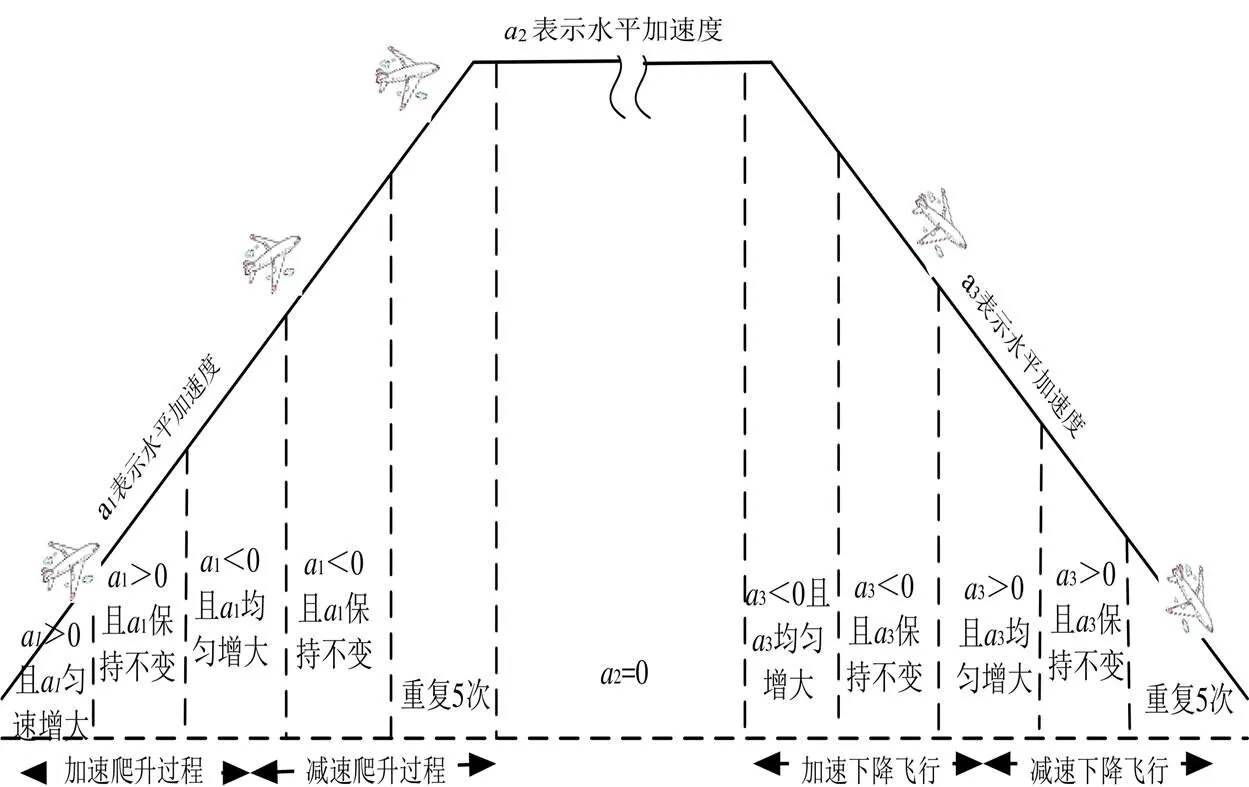
图16 正常机动飞行测试过程
接收机起始位置设置为:39.205°N,117.297°E(1 000 m),接收机位置的末端坐标设置为:39.681°N,118.259°E(1 000 m),仿真时需要提供水平方向动力学符合性验证环境和垂直动力学符合性验证环境,在所设置的环境下进行仿真分析。采样频率1 s取5次,共计2 200个定位点,动力学环境下的飞行轨迹如图17和图18所示。

图17 水平方向符合性验证飞行轨迹
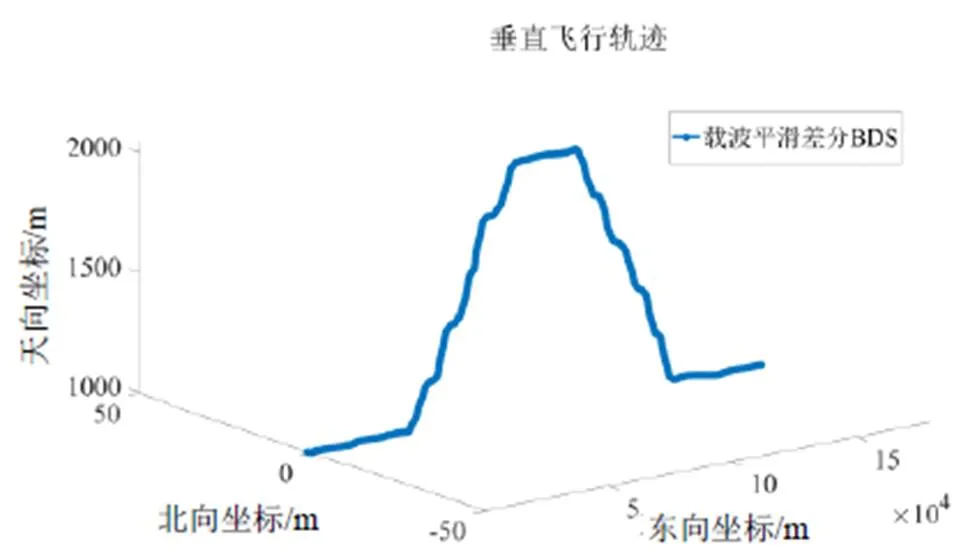
图18 垂直方向符合性验证飞行轨迹
根据动力学环境以及上述的仿真参数,相应地得到95%的速度统计量如图19和图20所示。
由图19和图20可知,随着样本数量增加,水平和垂直速度精度统计量均有下降趋势,且水平方向变化更为缓慢;水平速度精度统计量最大值为3.8≤10-;垂直速度精度统计量从28英尺/s逐渐平滑,均≤50-,说明机载设备的速度精度输出测试通过。
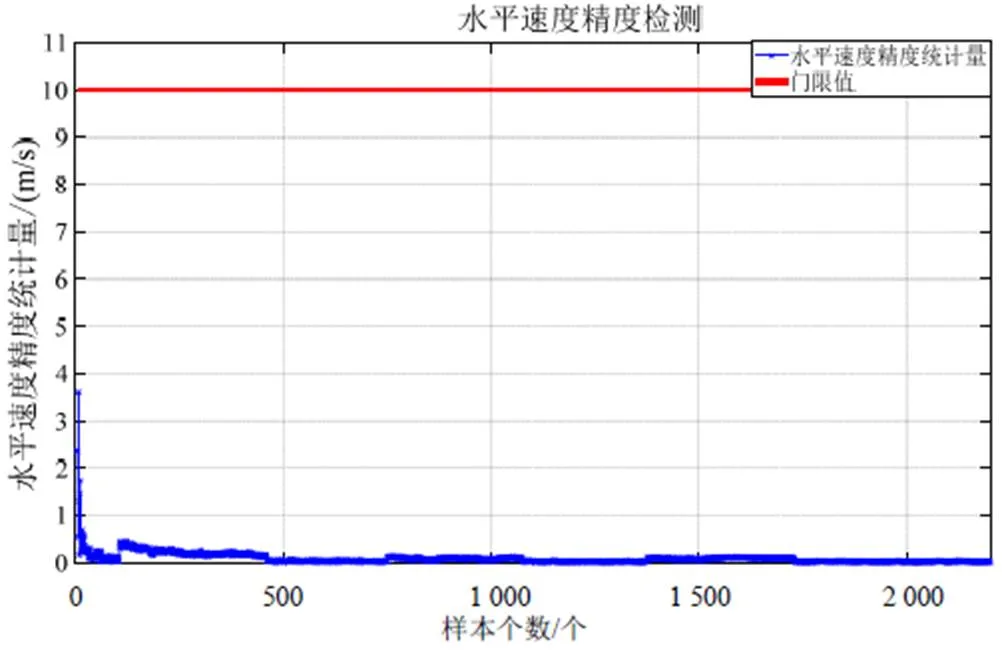
图19 水平速度精度统计量
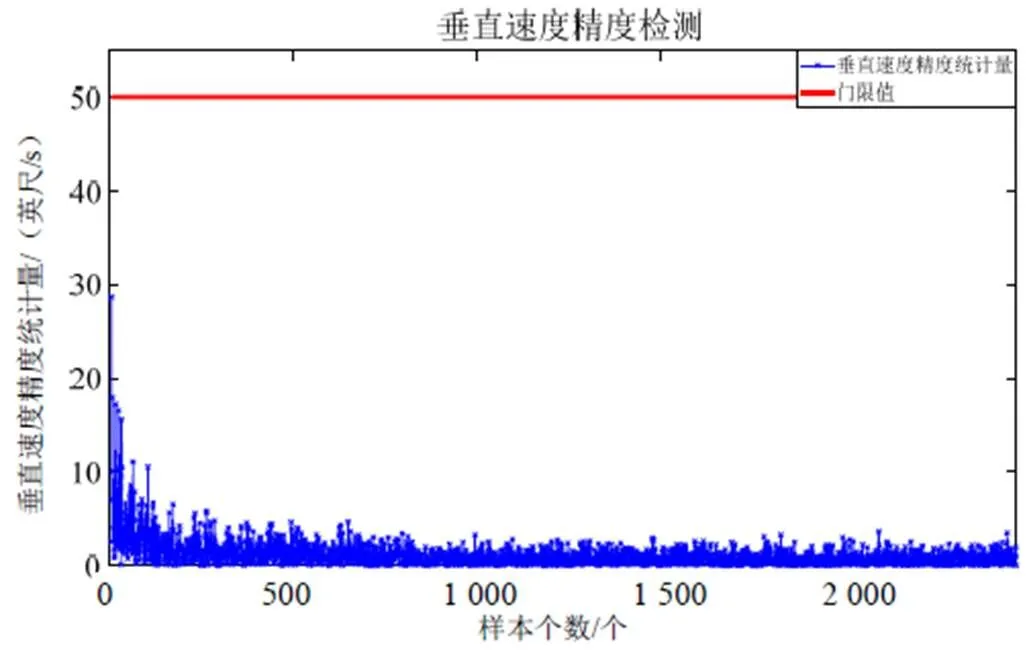
图20 垂直速度精度统计量
综合以上对系统性能分析和导航性能分析,设计仿真测试平台主界面和各项功能菜单,点击菜单,所包含的信息如图21所示。
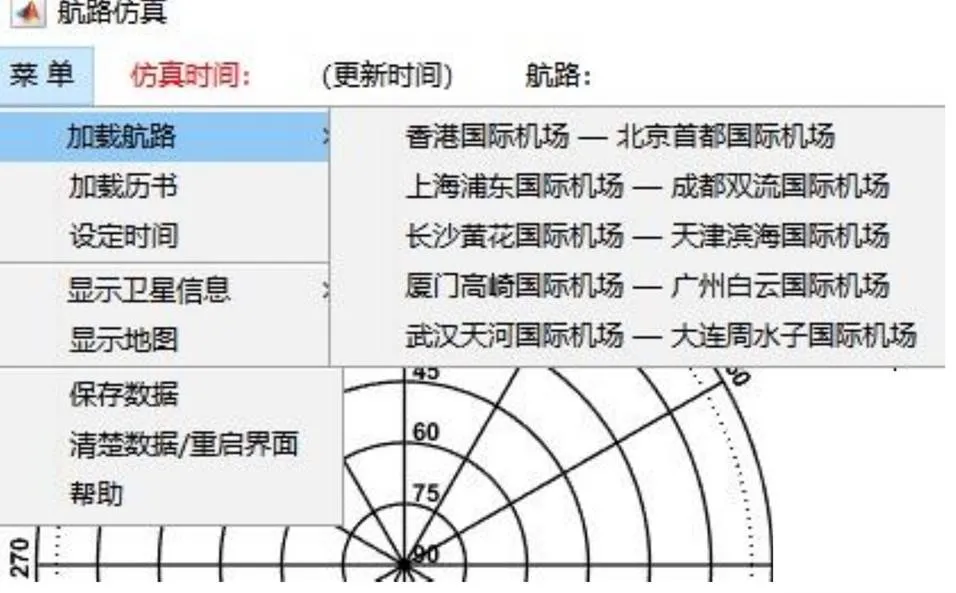
图21 菜单具体内容项
如图21所示,菜单具体内容项中点击“加载航路”,随即显示出可供加载的多条终端区最后进近路径,根据所设定的具体仿真时段,在测试仿真平台中模拟实际运行情况。
4 结语
本文完成了北斗GBAS性能仿真验证,对飞行过程中的系统性能进行了仿真分析,得到了两点结论:
1)基于静态、动态两种仿真场景,结合最后进近航段(Final Approach Segment,FAS)对系统精度和完好性进行整体仿真方案设计,对GBAS系统的导航信息、系统功能和系统性能进行了分析,结果表明GBAS系统性能均符合I类进近要求。
2)采用Flight Gear与Matlab联合仿真,利用Simulink搭载3D视景实时显示界面,实现对接,可在进近着陆过程中切换驾驶舱视野实现不同角度观测。最后进行系统集成,根据测试设定的具体条件,模拟实际运行情况。研究表明,新型地基增强系统在民航中具有较大的优势,相关仿真结果对国内积极开展GBAS飞行试验具有指导意义,可以为I类精密进近的GBAS在机场安装运行提供理论基础。
[1] ICAO DOC 8071-Manual on testing of radio navigation aids Volume II testing of satellite-based radio navigation system (Fifth Edition)[S]. Montreal Canada:ICAO,2007:1-3.
[2] EASA ETSO-C161a. Ground based augmentation system positioning and navigation equipment[S]. European Aviation Safety Administration,2012.
[3] 张裕,刘志忠,张雪丽,等. 基于GNSS的GBAS高精度进近着陆定位算法研究与仿真[C]//第十届中国卫星导航年会论文集. 北京:中国卫星导航学术年会组委会,2019:1-5.
[4] 倪育德,路璐,刘瑞华. 基于GPS/BDS的陆基增强系统精度和完好性[J]. 中国民航大学学报,2017,35(6):1-6.
[5] 马莹,李贺,刘海颖. 基于GBAS的飞机精密进近性能分析[J]. 指挥信息系统与科学,2020,11(5):98-103.
[6] RTCA. Minimum aviation system performance standards for the local area augmentation system DO-245A[S]. Washington D.C:RTCA,2004.
[7] 刘军,王晶晶,唐剑,等. 基于GBAS相位平滑伪距差分修正改正算法[J]. 东北大学学报(自然科学版),2016(39):1241-1244.
[8] 于耕,张洪亮,耿雪松,等. 基于北斗的地基增强系统飞行试验性能[J]. 科学技术与工程,2017,17(18):331-335.
[9] 倪育德,刘希之. I类GBAS机载接收机的品质因数[J]. 计算机仿真,2020,37(7):48-54.
[10] 吕浩源,张辉,庞春雷,等. 卫星导航着陆系统地面站完好性监测研究综述[J]. 全球定位系统,2016,41(3):29-34.
[11] 张悦,王志鹏,李强,等. GBAS基准站布设方案设计与评估方法[J]. 北京航天航空大学学报,2018,44(12):2545-2554.
[12] BLANCH J,WALTER T,ENGE P. Gaussian bounds of sample distributions for Integrity analysis[C]//IEEE Transactions on Aerospace and Electronic System:IEEE,2019,1806-1815.
Simulation Verification of Beidou Ground-Based Augmentation System Performance
LIU Ruihua, LIU Chang
GBAS can provide a remedy for many shortcomings of traditional navigation systems. To evaluate the navigation performance and system performance of GBAS and to verify the integrated performance of GBAS approach services under different types of operation conditions, it is usually necessary to conduct corresponding flight tests. Considering that GBAS flight tests need to be conducted in combination with specific test equipment and operating environment, the process is always very complicated. Therefore, simulation data is adopted instead of real-collected data to simulate and verify the landing period Category I Precision Approach (CAT I) and Required Navigation Performance (RNP) of GBAS in a laboratory environment with Flight Gear and Matlab software. The simulation results show that GBAS can meet the CAT I approach and landing performance requirements and can provide a solution for the promotion of Beidou-based GBAS technology in the civil aviation field.
GBAS; Flight Test; Approaching and Landing
V243.6
A
1674-7976-(2022)-05-325-09
2022-04-27。刘瑞华(1965.10—),陕西蓝田人,博士,教授,主要研究方向为卫星导航、惯性导航和组合导航。
国家重点基础研究发展计划(2016YFB0502402)