商用车网络架构设计探讨
2022-11-07吴成东
吴成东
(安徽江淮汽车集团股份有限公司技术中心,安徽 合肥 230601)
1 引言
轻卡部分出口项目配置要求持续提升,已经配置自动挡和AEB,并逐步增加L2自动驾驶部件。目前网络系统设计简单延续老产品的方案——单网段,所有CAN节点均在一个网段上,主要存在的问题是通信负载率较高,达到70%以上。由于CAN通信采用仲裁机制,当几个节点同时往总线上发送报文时,优先级低的节点会出现丢帧的风险,实车测试出现故障。
J1939协议将ECU之间的通信标准化,为不同的供应商提供了一种通用的语言。根据常见的功能,定义相关信号,信号的长度、精度、偏移量、数值范围、初始值等均进行标准化定义。对报文类型、周期、ID等进行标准化的定义,对信号在报文中的位置进行标准化定义,而乘用车都是使用OEM自定义的应用层。J1939的比特率通常为250kb/s,拥有18位扩展标识符,共29位标识符。
2 商用车网络架构设计
2.1 设计概述
通信负载率的定义:1s内总线传输数据所占带宽的百分比。
通信负载率=总线上单位时间(1s)内传送的数据总量/总线传输速率(单位时间内可传输的数据量)=ΣL×(1000/T)/(t×1000)×N。
式中:L——报文总长度(bit),不考虑位填充,标准帧111bit,扩展帧139bit;T——第i个报文周期,ms;N——周期为T的报文的数量;t——网段的通信速率,kb/s。
例如:报文周期10ms,J1939扩展报文的长度140bit,总线速率250kb/s。一个10ms的报文所占的负载率为:140×(1000ms/10ms)(b/s)/(250×1000)(b/s)=5.6%。
所有报文所占总线的负载率总和就是总线的通信负载率。其中,立即帧不纳入计算,变周期的报文按照非触发状态的周期计算。
通信负载率一般没有明确要求,通过测试发现超过60%会存在通信故障。根据通信负载率的定义和计算公式,降低通信负载率主要可以从增大报文传输周期、提升网段通信速率、减少报文数量、合理划分网段等几个方面出发,有以下具体实现方案。
2.2 设计思路
1)降低报文的传输频率,即增大报文传输周期,少用10ms、20ms的短周期报文。报文传输的频率过快,存在总线资源上的浪费,每个报文需要从功能的需求以及控制器、传感器、执行器的更新速度限制条件出发确定最小更新周期。针对使用频率不高的报文,在不使用时按照约定的机制自动停发,如立即帧,需要使用时发送控制器主动发送报文主动解除停发,可以解决周期短的报文造成总线负载率高的问题,还可以采用变周期的报文机制,目前轻卡上已有大量报文采用该策略。J1939已经对报文类型、周期、ID进行了标准化定义,无法修改。
2)优化报文数量,标准数据帧数据场由8个字节组成,但是加上仲裁场、控制场等标准帧长度至少111位。减少报文数量会减少大量“无用”的仲裁场和控制场数据。在数据场方面,在满足需求功能的前提下,为了减少控制器所需的报文,需要合理评估信号所需的精度和允许的范围,在满足需求的前提下精度尽量粗,范围尽量小,减少信号所占用的位数。但另一方面,每个报文也不能够完全被占用完,为后期做一些预留,一般空2~3个字节。目前行业正在应用CAN-FD(CAN with Flexible DataRate)通信,数据场具备64个字节,可承载的信号更多,从而减少报文数量。但是J1939协议的报文和内部的信号都是标准化的,无法重新打包。
3)提高通信速率,提高通信速率后单位时间内能传输的报文更多。乘用车的通信速率有125kb/s、250kb/s、500kb/s,目前动力、底盘和车身均使用500kb/s的通信速率。J1939协议有250kb/s和500kb/s,通信速率升级需要以网段为单位整体升级,短期内实施难度较大。
4)合理划分网段。CAN通信是以广播的形式在总线上传播,节点只接收和识别与自身有通信需求的报文,所以总线上会存在大量与自身功能无关的报文。通过划分网段将有功能强相关性的节点划分在同一个网段,如按照功能域划分为动力、车身、底盘网段等,不同网段间的少量信号需求通过网关进行报文或信号路由。另外,网关还可以隔离不同速率的网段,如动力CAN采用高速总线通信、车身CAN采用低速通信,而不通过网关的单一网段所有节点通信速率必须保持一致。网关可以采用独立网关也可以是一个或多个控制器的集成网关,如燃油车BCM集成网关接动力底盘CAN和车身CAN,纯电动车VCU接动力底盘CAN和车身CAN;混合动力车仪表和VCU作为两个集成网关,仪表接底盘CAN和车身CAN,VCU 接混动CAN、底盘CAN 和电池CAN。当前乘用车独立网关与集成网关均是成熟方案。考虑到J1939协议已经对报文及信号做标准化定义,网关只能采用报文路由,否则新增ID或改变周期后接收节点无法识别。
5)控制器带多路CAN接口或子CAN/LIN。减少单一的主干通信,通过子网分担主干的通信负载,但需要控制器硬件平台具备相应的接口。48V混动系统采用EMS子CAN内部通信,EMS兼做HVCU功能。BSD的主雷达与从雷达之间通过子CAN通信。传感器、开关和执行器一般通过LIN与主节点通信,采用主从通信方式由主节点对其调度,如雨量传感器、方向盘开关、天窗电机等。
当前由于通信协议无法整体升级,控制器软件、硬件也无法变动,通过划分网段来解决通信负载率问题较直接和有效。
2.3 设计方案
当前方案的评估:只有一个网段,详细的CAN节点如图1所示。

图1 单网段总线拓扑图
单网段总线架构在过去很长一段时间内满足商用车的配置需要,系统成本控制较好,网络结构简单。各节点的诊断可以延续K线。单网段通信负载率计算见表1。
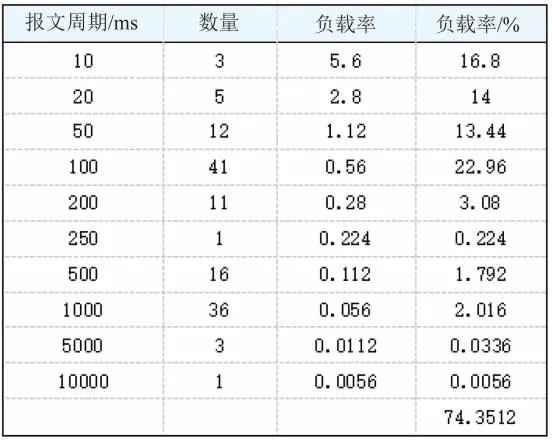
表1 单网段通信负载率计算
按照扩展报文长度140bit计算,考虑实车状态和技术文件,负载率达到74%。
2.3.1 方案1:双网段
划分为两个网段,动力底盘CAN和车身信息CAN。其中动力CAN是将实时性要求高、信息共享关联大的节点互联在一起,车身CAN由车身部件和其他实时性要求相对较低的节点组成。网关可以是实物节点也可以是虚拟节点集成在某控制单元中,如BCM、ICM、VCU等供应商体系完善、自主的软件开发能够掌控可以采用集成网关。如果没有节点具备集成网关的平台或供应商没有开发集成网关的能力,可以引入独立网关GW,只做信号或报文路由功能。各节点的软件均不变动,跨网段的信号需求均通过网关路由。网关不需要独立的诊断CAN,PCAN和BCAN均接到OBD口,设备直接诊断,网关本身在BCAN上诊断。双网段拓扑图详见图2。双网段通信负载率计算见表2。

表2 双网段通信负载率计算
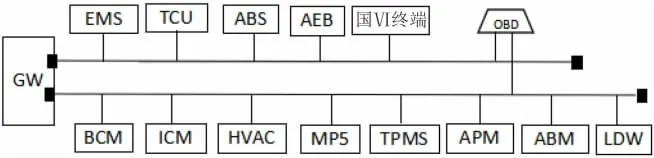
图2 双网段总线拓扑图
2.3.2 方案2:多网段
考虑到新增L2 辅助驾驶、纯电动或混合动力等配置,对动力底盘CAN做进一步划分,形成动力CAN、底盘CAN和车身信息CAN共3个网段。采用独立网关GW,只做信号或报文路由功能。各节点的软件均不变动,跨网段的信号需求均通过网关路由。网关新增独立的诊断CAN,PCAN和DCAN均接到OBD口,设备直接诊断PCAN,CCAN和BCAN通过DCAN网关路由诊断。以燃油车为例,网络拓扑图见图3。多网段通信负载率计算见表3。

表3 多网段通信负载率计算
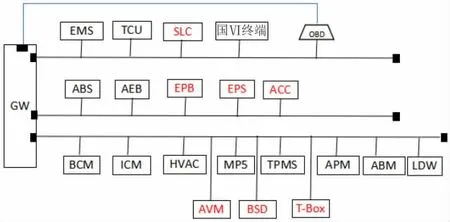
图3 多网段总线拓扑图
该方案的扩展性强,硬件成本相对于方案一增加不多,考虑到后期的ADAS扩展。另外,对于商用车会有大量后装的终端和改装,可以考虑从网关单独引出一路用于后装,避免后装件品质参差不齐影响到整车的网络,确保车辆安全性。还可以以网段为单位进行“提速”,将动力CAN通信速率提升到500kb/s。
2.3.3 方案3:集成网关+多网段
集成网关一般只具备两个CAN接口,实现3路CAN的方案可以采用两个集成网关,主要考虑变动情况和集成网关的软件开发能力。集成网关多网段总线拓扑见图4。

图4 集成网关多网段总线拓扑图
3 结论
方案1可以满足当前的燃油车开发需求。如果同步考虑纯电动车开发和网关软件的通用化,建议采用方案2。
本文考虑到商用车ECU通信软件不能变动,网关均采用报文路由,对网关软件开发要求降低。如果控制器软件可以重新开发,采用信号路由将会进一步降低通信负载率。
