通过配置及模式设定优化车载毫米波雷达探测距离的研究
2022-11-07蔡刚强张创城
蔡刚强,张创城
(1.广东省智能网联汽车创新中心有限公司,广东 广州 510640;2.广州汽车工程研究院,广东 广州 511400)
雷达早在20世纪30年代已投入使用,当时主要被军方用于探测飞机,自那以后,雷达技术已经取得了长足的进步。得益于射频技术和数字信号处理技术的高速发展,低成本、小尺寸、高效率的雷达成为可能,如今,它们越来越多地被用作先进驾驶辅助系统(ADAS)中的汽车雷达传感器,即毫米波雷达。
关于自动驾驶技术路线,无论是“强感知和强智能”路线,还是“弱感知和超强智能”路线,毫米波雷达都是不可或缺的传感器。自动驾驶感知系统由多个传感器构成,每个传感器都有其自身的优缺点。毫米波雷达最大的优点是可直接测量径向速度,另一个优点是很少受到环境因素影响,因此可以在复杂的光照、雨雪等天气条件下全天候工作。
1)毫米波雷达的工作原理是:利用电磁波的传输和探测进行工作,当电磁波遇到障碍物时会被反射,如果这些反射波在它们的原点再次被接收,那意味着该障碍物在传播方向上。
2)应用于自动驾驶领域的毫米波雷达主要有3个频段,分别是24GHz、77GHz和79GHz,其中24GHz已基本不用于车载,当前主流为77GHz。
3)车载雷达分为长距雷达和短距雷达,长距雷达可以测量远达200m以上物体,但视野很小,而短距雷达有较大的视野,但探测距离较短。长距雷达主要用于前向雷达,短距雷达主要用于角雷达,如实现盲区检测等功能。
由于国内自动驾驶起步较欧美国家晚,这也导致当前低等级自动驾驶方案供应商主要为欧美发达国家供应商。随着自动驾驶在国内的发展,特别是高等级自动驾驶方案的层出不穷,对传感器的感知性能也不断提出新的需求。过往,如低等级自动驾驶方案,1R1V(1个前向雷达+1个前向智能摄像头)基本由欧美供应商,如博世、安波福、维宁尔等以系统层级方案进行供货,具体传感器的感知性能很难直接获取。随着高等级自动驾驶的发展,以系统层级方案供货的方式正逐步发生变化,如域控制器和传感器的供货商不为同一家,为划分清楚彼此的开发边界,势必需对传感器的开发范围及感知边界进行澄清,这也是开展毫米波雷达感知范围测试的另一个原因。
经分析,毫米波雷达工作模式主要包括近距离、中距离和远距离模式,其中视野越大,可探测的范围越小,而且这3种模式属于自动切换,且自动切换的机理受环境因素、本车车速等多种因素影响。基于上述背景,尝试通过配置DID,设置毫米波雷达工作调制模式为远距离模式并开展相关的测试工作,验证探测距离是否得到提升。
1 高等级自动驾驶系统感知距离需求分析
如图1所示,基于ISO 22179,直道时(A2区域),最小感知距离需大于190m,其中减速度约0.4g,另外假定被探测目标为车辆。
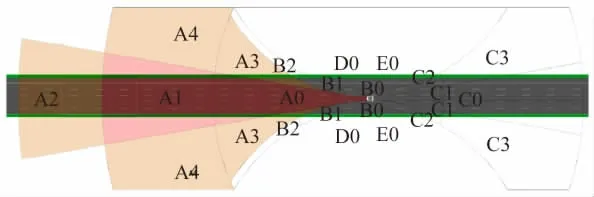
图1 高等级自动驾驶系统感知距离需求
基于上述感知需求,对当前车载传感器的感知探测距离进行初步分析。目前市面主流的自动驾驶相关的传感器包括毫米波雷达、超声波雷达、摄像头、高精度地图、惯导及激光雷达等。毫米波雷达、超声波雷达、低像素摄像头较为成熟,过往已经在低等级自动驾驶上有所运用。随着近年高等级自动驾驶的发展,惯导、激光雷达等传感器也不断在各车型上量产搭载,但受限于传感器的工作原理,当前远距离测距的主流传感器仍为毫米波雷达。虽然激光雷达量产在即,但其量产后的品质情况和感知性能仍有待市场的进一步验证,同时当前的价格也缺乏一定的竞争力。超声波雷达感知距离一般只能达到5m多,远不足以远距离探测。另外,低像素摄像头远距离探测不仅距离不足,同时偏差较大,而高像素摄像头与激光雷达类似,有待市场进一步验证。
当前主流车企,除特斯拉等采用纯视觉方案,基本还是搭载了毫米波雷达进行远距离探测,再辅以其它传感器,如摄像头、激光雷达等,所以,本文选择毫米波雷达作为距离感知需求基本传感器,并重点研究其可探测范围。
2 毫米波雷达探测距离实测分析
鉴于对毫米波雷达工作原理的基本了解,其可探测视野为扇形,所以,第一步开展的工作主要是画出毫米波雷达可视范围。进一步重点就其最远距离进行分类研究测试,包括本车车速状态和目标车车速状态等进行分类测试,得出测试结果。下文将介绍为测试毫米波雷达可视范围而采用的设备和测试方法。
2.1 测试设备
测试设备清单见表1。
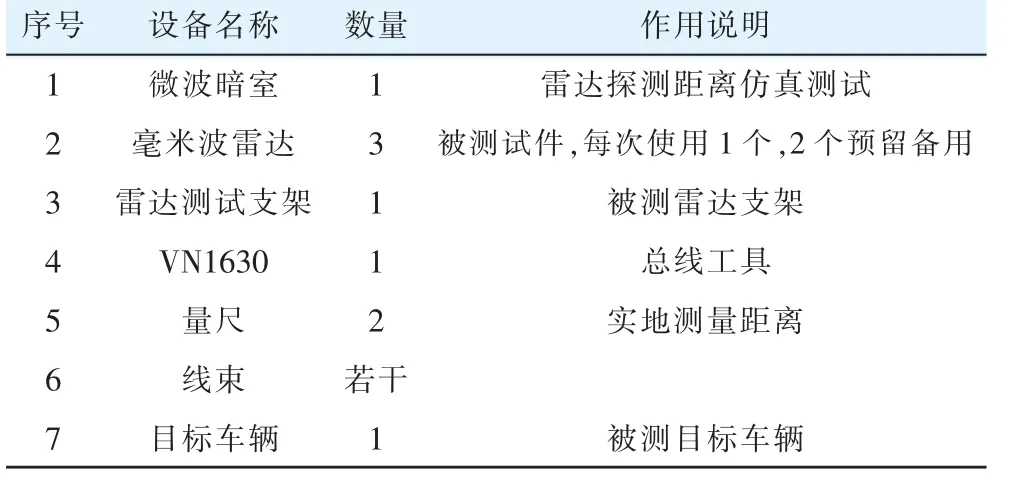
表1 测试设备清单
1)微波暗箱,主要用于仿真测试毫米波雷达探测距离和速度等,如图2所示。

图2 微波暗箱
2)毫米波雷达场地测试支架(图3),用于安装和支持毫米波雷达开展测试。毫米波雷达支架局部放大图如图4所示。
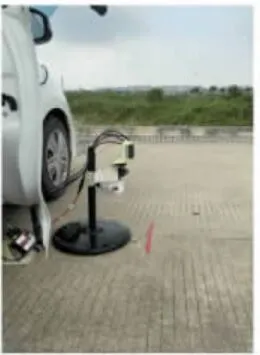
图3 毫米波雷达支架

图4 毫米波雷达支架局部放大图
3)其它设备为被测车辆及卷尺等。
2.2 测试流程
2.2.1 微波暗室测试
如图2所示,搭建仿真场景,包括仿真目标RCS值、速度、角度、距离等。
1)设置仿真目标RCS值,本次测试主要目标物为车辆,因此RCS值设置为10dB。
2)设置仿真目标速度值,本次测试的主要目标分静止目标和运动目标,运动目标再细分为对向和同向。
3)设置仿真目标角度,鉴于前向毫米波雷达FOV(水平探测范围)一般小于120°,本次测试仿真的角度按0~60°,间隔5°进行仿真。
4)设置仿真目标距离,鉴于前向毫米波雷达探测距离一般小于250m,本次测试仿真的探测距离按0~250m、间隔5m进行仿真。例如,将目标物设置在250m处,然后通过VN1630及电脑端观测是否能稳定探测到该目标物,如果无法探测到目标物,将仿真目标距离减少5m,设置为245m,以此类推。
每个角度测试3遍并计算平均值,微波暗室详细测试数据见表2。
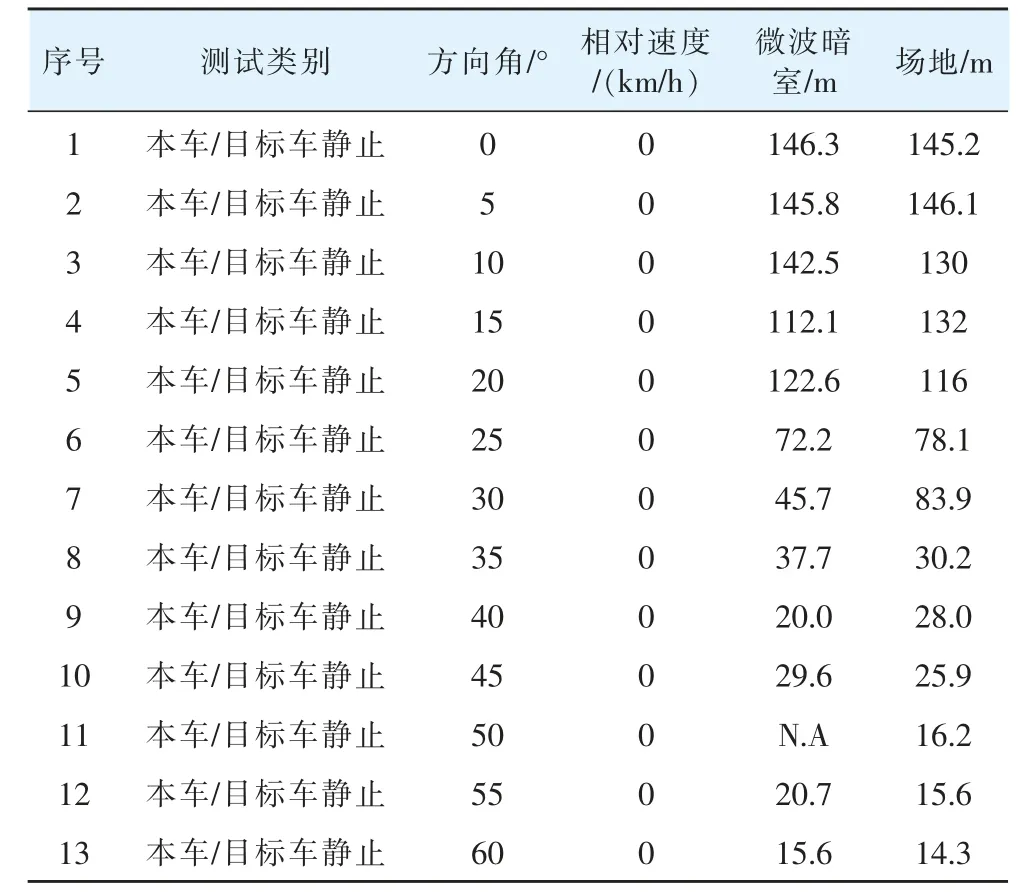
表2 静态测试微波暗室和场地测试数据
2.2.2 场地测试
如图3所示,搭建场地测试场景,在场地搭建同实车相同布置高度的毫米波雷达。
1)场地测试毫米波雷达方向角设置,如图4所示,利用该设备进行角度调制。
2)速度设置,分别测试3组速度,0km/h、10km/h和55km/h,方向角均为0°。
3)距离探测,静态目标测试借鉴微波暗室仿真结果,在100m位置按5m往后挪,等候1min后,观测是否探测到静态车辆,直至无法稳定观测到静态车辆位置。动态目标测试以靠近毫米波雷达支架位置为坐标原点,目标车辆沿着0°方向直线以10km/h和55km/h匀速行驶。通过VN1630及电脑端观测目标消失时的距离。每个场景测试3次并计算平均值,测试数据见表3。

表3 动态测试微波暗室和场地测试数据
2.3 测试小结
1)静态测试,即本车和目标车辆车速均为0时,毫米波雷达最远可探测范围约146m。
2)动态分析均基于0°方向角进行测试,包括本车静止和运动、目标车静止和运动、目标车正向和对向运动等多种情况。
本车或目标车辆其中一个车速不为0时,观测数据可得:①毫米波雷达可探测范围均达不到感知需求190m;②目标车正向运动时,毫米波雷达可探测范围可达到160m以上;③目标车如静止或对向运动,毫米波雷达可探测范围达到140m以上。
3 毫米波雷达探测距离提升及验证
经调查和证实,毫米波雷达工作调制模式分为4种,包括:Auto mode、Near、Medium、Far。雷达默认工作调制模式为:Auto mode,因此雷达探测的近距离、中距离和远距离模式是自动进行。因此设想,通过新增雷达工作调制模式配置DID,设置雷达波调制模式为远距离模式,并对毫米波雷达探测距离进行验证分析。具体的验证步骤和测试结果如下。
场地测试场景搭建,在笔直道路通过自车和目标车不同运动状态对毫米波雷达感知性能进行测试,每个场景测试3次,计算平均值,Far模式场地测试数据见表4。

表4 Far模式场地实测数据
场景1,本车静止,目标车正向运动,最远可探测距离大于190m,毫米波雷达探测距离示例如图5所示。
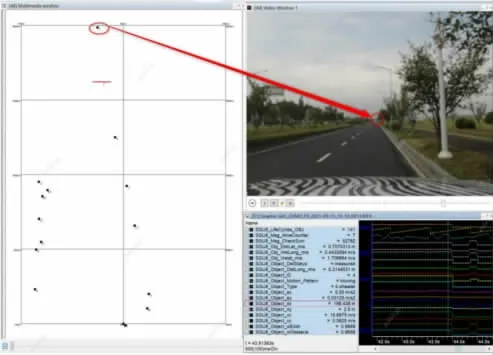
图5 本车静止,目标车正向运动,毫米波雷达探测距离示例
场景2,本车静止,目标车对向运动,最远可探测距离大于190m。
场景4,本车运动,目标车静止,最远可探测距离小于140m。
场景5,本车运动,目标车正向运动,最远可探测距离大于190m。
场景6,本车运动,目标车负向运动,最远可探测距离大于190m。
4 结论
基于上述的分析和测试验证,可大致得出以下结论,如毫米波雷达工作模式自动设置为Auto模式,则其可探测距离大致可分为两档:①如目标车辆为正向运动,则其探测距离约为160m以上;②如果目标车辆为对向运动或静止,则其可探测距离约为140m。
通过将毫米波雷达的工作调制模式设置为远程模式,则目标车辆无论是正向运动或对向运动,总而言之,对动态目标的探测距离可达到190m以上。但如果被测目标处于静态,则毫米波雷达的探测距离也仅能达到140m。
5 测试说明
本次测试说明包括以下方面。
1)被测毫米波雷达虽为主流国际供应商提供,代表行业毫米波雷达探测距离的普遍水平,但本测试并未就市场上所有毫米波雷达展开测试,所以本次测试数据及结果仅代表部分毫米波雷达供应商其产品的探测能力。
2)整个测试过程中,雷达采用的都是同一软硬件型号。后续存在硬件版本相同,但软件版本提升,从而导致毫米波雷达测试能力提升的可能性。
3)受测试场地(例如周边环境)的影响,对探测结果也存在一定的影响。
4)虽然通过设置雷达调制模式为Far,能有效提升运动目标的探测距离,但其探测精度等也会有所下降,需要传感器选型工作人员进一步明确需求,包括探测距离、距离精度等。
5)本测试雷达输出的是目标列表,即经过聚类的数据,但实际在测试过程中,观察原始点云,存在部分点云最远距离大于200m。
6 展望
当前,除了特斯拉等激进厂商采用全视觉方案而取消掉毫米波雷达,其它国内外主流厂商依然将毫米波雷达作为其自动驾驶探测距离的主要传感器。基于毫米波雷达的速度探测精度和全天候工作等特点,未来其在自动驾驶领域仍有一席之地,展望未来,随着4D毫米波雷达的量产搭载,毫米波雷达理应在自动驾驶传感器领域占据重要地位。
但是,当前鉴于4D毫米波雷达和激光雷达仍处于量产落地阶段,后期其实际的探测效果仍有待验证,因此,基于目前可选择的传感器类型,毫米波雷达依旧是探测距离和速度最佳选择。那么,针对于高等级自动驾驶远距离的探测需求,通过设置DID,将毫米波雷达的工作模式固定在远距离模式是目前实现落地较为经济可行的方式之一。
