亚太大学生小卫星SSS-1系统设计与在轨试验
2022-11-05黄海赵旭瑞孙亮陈珅艳
黄海,赵旭瑞,孙亮,陈珅艳
北京航空航天大学 宇航学院,北京 100191
由于具有重量轻、体积小、发射方式灵活、研制周期短、成本低等优势,微小卫星受到了越来越广泛的关注,这类卫星发射数量近年快速增加[1]。亚太大学生小卫星(Student Small Satellite,SSS)项目是由亚太空间合作组织(Asian-Pacific Space Cooperation Organization,APSCO)发起的旨在提升各成员卫星研发与应用能力及空间技术教育水平的项目,也是中国国家航天局“一带一路”国际化空间发展倡议中的重点项目,被列入《2016中国的航天》白皮书。
APSCO SSS项目由1颗30 kg微卫星(SSS-1)和2颗3U立方星(SSS-2A/2B)组成,共同完成包括新型展开机构在轨展开、对地成像、星间通信等多项技术验证任务,三星在轨运行状态如图1所示。该项目由北京航空航天大学(北航)作为牵头大学(Leading University)联合国内外成员国大学团队实施研发,北航团队还负责其中微卫星SSS-1的系统设计、主要分系统设计和研制及最后的总装集成,此外还负责为3颗卫星落实了频点申报、运载火箭搭载及发射许可等事宜。SSS项目卫星于2021年10月14日成功发射,它开创了中外大学开展小卫星国际合作研发的先例。
SSS-1卫星(图2)目前已运行在高度为517 km的太阳同步晨昏轨道超过半年,健康状况良好,已基本完成了预先设定的全部技术试验任务。本文将从总体角度对SSS-1卫星系统设计和在轨试验进行介绍,包括有效载荷与平台。
1 有效载荷及功能
SSS-1卫星共配置6个有效载荷,分别为盘绕式伸展臂、空间相机、对地遥感相机、ADS-B接收系统、星间通信设备和电推进器离轨装置。其中,盘绕式伸展臂和电推进器离轨装置完全由北航团队自主设计研发,其余载荷则由北航与合作单位协同研发。盘绕式伸展臂具有大柔性、高展开收拢比的特点,是国内首个在轨验证的被动式盘绕展开机构;电推进装置具有高比冲、变推力和集成化的特点,是国际上首个容性储电单台自中和电喷雾推力器的在轨试验。
1) 盘绕式伸展臂
盘绕式伸展臂是一种伸展压缩比可达20∶1或以上的空间伸展机构,通常装载于很短小的空间内,入轨后展开。它既可用于卫星的姿态指向和稳定,也可用于将某些灵敏装置或敏感器外伸到远离卫星本体的位置,以减少本体电磁特性对这些敏感设备的影响。北航自主研制的盘绕式伸展臂是SSS-1卫星的关键在轨验证载荷,主要由伸展臂本体和锁紧释放机构组成。锁紧释放机构又包含3个执行机构(拔销器、旋转阻尼器和编码器)和2个控制设备(展开控制器和编码器接口转换模块)。
所设计的盘绕式伸展臂是一种采用拉索展开的三角形截面铰接式伸展臂,由纵杆、横杆、对角加劲索以及铰接头组成(图3),总重量小于0.8 kg,总长度为2 m,展开收拢比达20∶1。伸展臂纵杆在轴向约束消失后,其内部应变能转换为轴向动能,在对角加劲索作用下沿横杆轴线方向对其产生压缩作用,而横杆沿其轴向产生压扭变形同时由于设计的几何关系将纵杆移动。随着纵杆的伸直,横杆变形减小并利用自身应变能将纵杆推回至盘绕半径处。
锁紧释放机构可在发射阶段将收拢的盘绕式伸展臂锁紧在卫星内部,如图4所示。卫星入轨后,机构解锁,释放伸展臂,特殊的构型和阻力拉索设计可保证其稳定地逐层展开[2-3]。
2) 空间相机
空间相机的基本任务是拍照记录盘绕式伸展臂的展开全过程。它安装在伸展臂根部附近,光轴朝着整星坐标系的-Z轴,即伸展臂的展开方向。盘绕式伸展臂展开后,空间相机还将进一步完成对其余空间目标(如:月球)成像的拓展任务。空间相机的主要设计指标如表1所示。
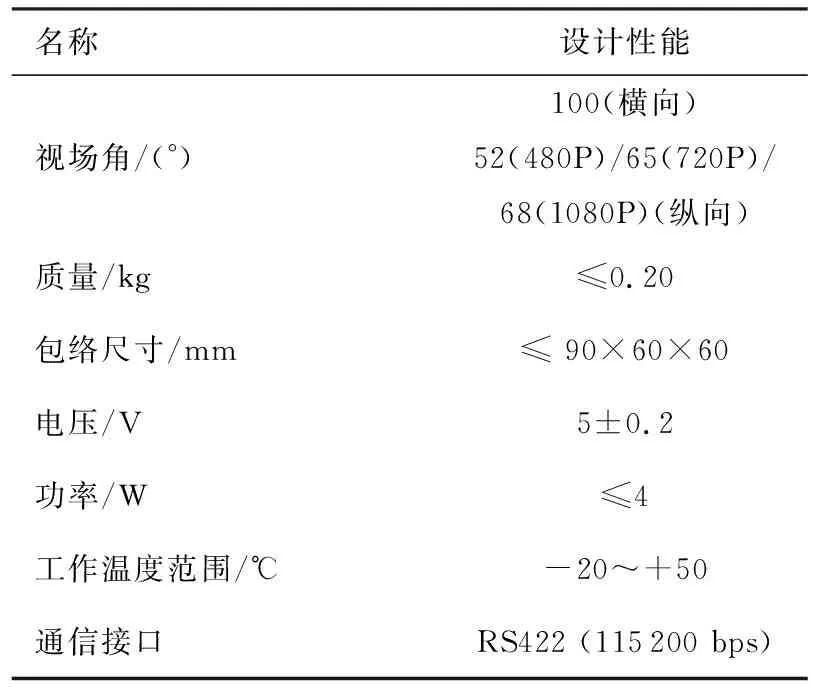
表1 空间相机主要设计指标Table 1 Main specifications of space camera
3) 对地遥感相机
对地遥感相机(图5)是SSS-1卫星获取地表图像的遥感成像设备。对地相机的分辨率为50 m,采用IMX252传感器,成像波段为400~680 μm,曝光时间范围为100 μs~30 ms。
4) ADS-B接收系统
广播式自动相关监视(Automatic Dependent Surveillance-Broadcast,ADS-B)是目前全球采用的一项新的空中交通管理技术,采用此系统的民用航空器通过1090ES数据链以一定周期自动向外广播本机的属性、状态信息、位置信息,这些ADS-B信号被地面空管系统接收,用以监控航空器、安全管理航线;被空中的飞机接收,则可实现相互监视,避免碰撞[4]。
SSS-1卫星上搭载的星基ADS-B接收系统(图6)由一个接收机和一个接收天线组成。ADS-B信号频点为1 090 MHz±1 MHz,使用脉冲编码调制方式将码元调制到射频,脉冲宽度为0.5 μs,消息块总长为140 μs。该星载ADS-B接收系统被用于试验对航空器发射的ADS-B信号的空间接收。此外, ADS-B信号在不同方向上的差异性,也为探索新的卫星定姿方法提供了基础[5]。
5) 星间通信设备
星间通信设备主要用于试验SSS-1卫星和SSS-2A卫星间的数据传输和组网通信。2星各装载了1台相同的星间通信设备,该设备实现了低功耗和轻量化,尺寸满足PC/104标准。星间通信机主要由射频前端、模速转换、调制解调器、网络协议处理、电源及接口电路组成。星间通信设备的通信距离可保持在500 km以内,发射功率500 mW。
6) 电推进装置
北航自主研制的电喷雾推力器(图7)设计用作SSS-1卫星的离轨装置。这是一种以液态推进剂作为工质的新型静电式推进装置。液体工质在电场的作用下雾化形成带电液滴并被加速产生推力,其推力范围在微牛至百微牛量级。电喷雾推进涉及渗流物理学、喷雾机理、电化学及场发射效应等多门学科领域的研究,是国际上空间推进领域的研究热点和前沿,具有功耗低、结构紧凑、控制灵活、可靠性高等特点,为微纳卫星等航天器的主动变轨、姿态控制等需求提供了新的解决方案。为此,SSS-1卫星也将此装置作为重要的在轨试验载荷。
2 平台组成及功能
卫星平台即卫星上除有效载荷外的其他部分,是卫星任务的保障系统。SSS-1卫星由6个分系统组成,分别是结构分系统、热控分系统、姿控分系统、星务分系统、测控数传分系统以及电源分系统。总体及各分系统指标如表2所示。
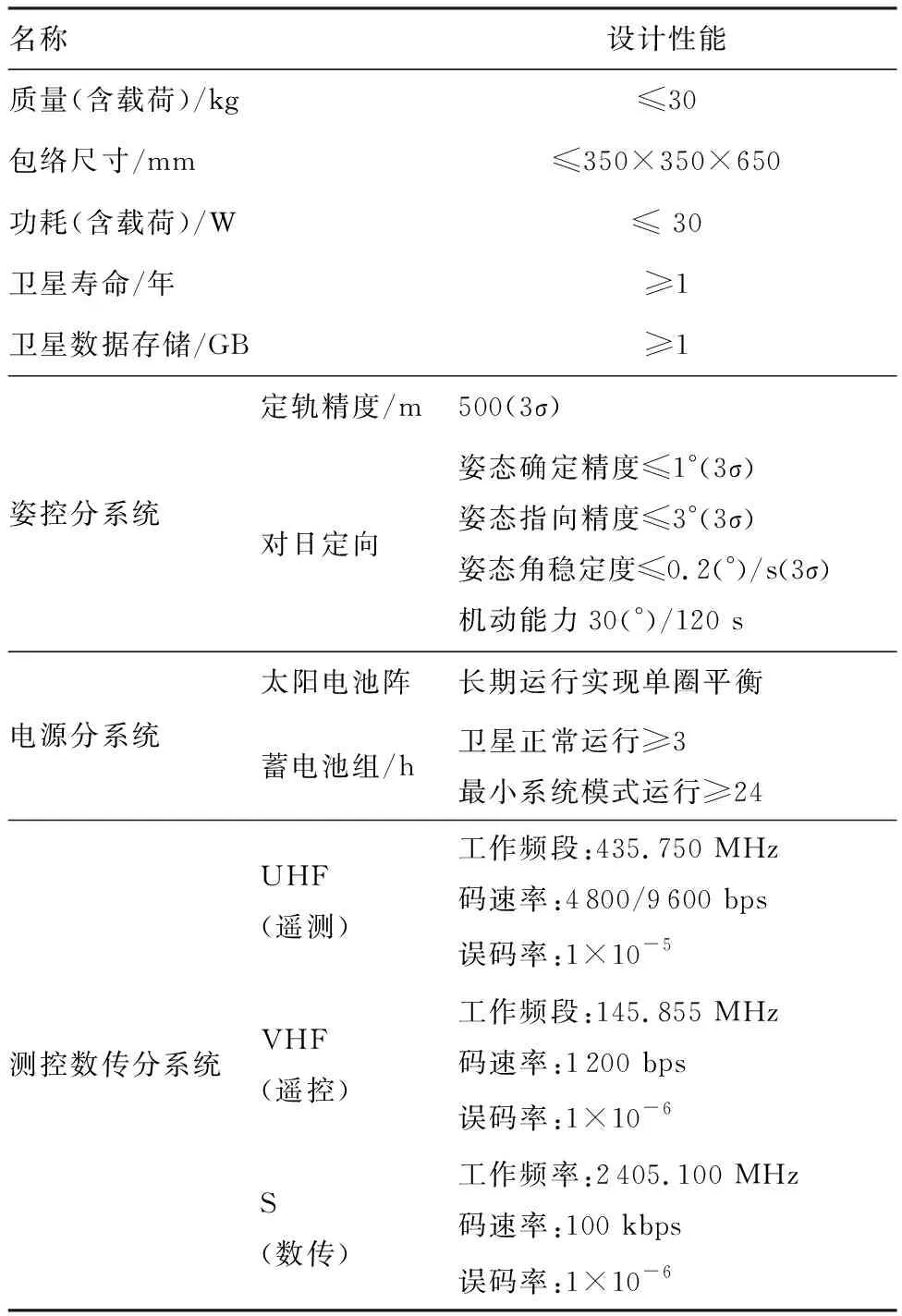
表2 卫星平台指标Table 2 Specifications of satellite platform
1) 结构分系统
卫星结构分系统是支承卫星有效载荷及其他分系统的骨架,具有提供整星构型、提供安装空间以及保护星内设备的作用[6-7]。
SSS-1卫星采用框架箱板式结构(图8),安装板与承力板一体化设计,最大化提高了材料利用率。±X、±Y以及±Z面的6个基板决定了整星的外部构型,4根L型角梁3个横向安装板分布在星体内部,对整星刚度进行加强。结构优化方法在详细设计过程中引入,以减小结构重量[8-10]。
2) 热控分系统
热控分系统的任务是通过各种主被动控制方法,控制星上各处的温度在要求的范围内,保障所有星载设备的正常工作,完成整星任务[11]。
SSS-1卫星采用被动为主、主动为辅的热控制策略。多层隔热材料(MLI)包覆在星体外表面(除散热面),将卫星在轨运行中外热流变化对星内的温度的影响降到最低。图9所示为卫星顶面MLI包覆情况;星体内部部组件表面进行发黑处理,增强辐射热交换,尽可能保证星内设备温度的均匀性;同时,针对蓄电池、空间相机等对温度敏感的关键器件,采用电加热主动热控设计,保证其温度需求。
3) 姿控分系统
姿控分系统由敏感器、控制器以及作动器组成,基本任务是融合各种敏感器信息确定卫星姿态,并根据控制目标利用作动器对姿态进行控制,保障卫星的指向要求,配合载荷完成任务[12]。
SSS-1卫星姿控分系统硬件配置如图10所示,其中敏感器包括1个三轴磁强计、2个太阳敏感器(热备份)和2个陀螺(冷备份);执行机构包括1个磁力矩器(含X、Y、Z共3条磁棒)和3个动量轮;姿态控制单元的功能由姿控计算机(ACU)实现。图11为SSS-1卫星姿控分系统硬件连接图。值得注意的是,盘绕式伸展臂的存在使得SSS-1卫星的姿态确定与控制有着一定的特殊性,北航团队也对相关算法进行了深入的研究[13-17]。
SSS-1卫星在轨运行过程中,姿控分系统主要分为4种工作模式,分别为太阳捕获模式(SAM)、对日定向模式(SPM)、对地定向模式(EPM)和安全模式(SBM)。各模式的基本情况如表3所示。
4) 星务分系统
星务分系统主要指星务计算机及其软件,是卫星的“大脑”,负责与各分系统进行信息交换并进行处理,完成星时管理、设备管理、飞行时序管理以及故障识别等功能[18]。
SSS-1卫星星务计算机(图12)包括主机与备机,为双机冗余结构。2台单机电路完全相同,同一时间只用一台计算机工作。计算机上配备CPU软件及FPGA软件,CPU软件将平台的对外接口进行统一定义,用户在此基础上进行二次开发形成应用软件;FPGA软件则用来实现CPU工作状态检测、时钟管理以及遥测数据下传等功能。
5) 电源分系统
电源分系统是卫星上产生、储存、调节、变换以及分配电能的系统,其主要任务是向卫星提供各个飞行阶段所需要的能源,以保证卫星平台与有效载荷的正常工作[19]。
SSS-1卫星的电源分系统包括太阳能电池阵、蓄电池组以及能源控制器3部分(图13)。太阳能电池阵采用体装式三结砷化镓电池片,通过光电转换将太阳能转换为电能;蓄电池组选用18650电池,可进行能量存储,在卫星进入阴影区或者太阳电池阵提供功率不足时为系统供电;能源控制器是卫星能源调节与控制设备,可实现电池阵工作状态控制、蓄电池充放电管理、二次电源变换以及功率分配等功能。
6) 测控数传分系统
测控数传分系统是卫星上与地面通信的系统,主要实现卫星遥测信息下传、地面遥控指令接收以及有效载荷数据下传等功能[20]。
SSS-1卫星的测控数传分系统由UV应答机、S数传机、UHF天线、VHF天线以及S天线组成(图14)。UV应答机承担遥测遥控功能,其中,VHF频段用于上行遥控指令,UHF频段用于下行遥测数据;S波段数传机通信频率较高,有着更好的数据传输效率,用来传输星上有效载荷的大量数据。UHF/VHF波段以及S波段的数据发送与接收均由相应的天线来实现。
3 在轨试验
SSS-1卫星搭载发射进入预定轨道后,顺利建立了天地测控链路,遥测信息显示:卫星运行状态良好,供配电正常、姿态稳定、数传通道畅通。在此基础上,各项载荷任务均按照预定计划进行了在轨验证工作。
3.1 平台健康状况
卫星在入轨后,平台状况得到持续监测,显示卫星平台一切正常。下面以电源分系统和热控分系统为例,简要说明卫星平台的健康情况。图15为SSS-1卫星母线电压及蓄电池组电压在半年内的变化曲线,显示即使在能源状况最差的冬至日(2021年12月21日)附近,卫星母线电压也处在安全电压之上(11 V),可保证平台的正常工作;图16为星上2个关键设备的在轨温度变化曲线,从中可知在半年周期内,设备温度均在许用范围内合理波动,热控分系统工作正常。
3.2 盘绕式伸展臂与空间相机
2021年10月16日18时21分,在地面指令的控制下盘绕式伸展臂解锁展开,遥测数据显示展开过程一切正常,约30 s后盘绕式伸展臂展开长度达到预定2 m长度。在盘绕式伸展臂展开过程中,空间相机每隔2.5 s对展开过程进行拍照记录。18时24分,经卫星星务分系统判读,盘绕式伸展臂处于完全展开状态。10月17日6时17分,盘绕式伸展臂完全展开的图像经S数传机传至地面,这意味着此次盘绕式伸展臂在轨试验工作取得圆满成功。展开试验成功后,后续择机下传了空间相机的全部10幅图像(图17),完整记录了盘绕式伸展臂在轨展开的整个过程。
3.3 ADS-B接收系统
2021年11月下旬,SSS-1卫星完成了有效载荷ADS-B的在轨功能试验。在试验中使用地面站上行遥控指令启动星载ADS-B,遥测信息显示星基ADS-B接收并存储了多条航班信息数据,这些数据经S波段数传机传输到S地面站,解码后得到卫星过境时收到的航班信息(图18),这标志着星基ADS-B在轨验证任务取得圆满成功。
3.4 星间通信
2021年12月上旬,SSS-1卫星完成了星间通信载荷的在轨验证任务。当SSS-1卫星和SSS-2A卫星过境时,北京航空航天大学地面站和上海交通大学地面站分别上行遥控指令开启星间通信载荷,SSS-1卫星每隔8 s发送一帧数据,同时接收由SSS-2A卫星发出的通信数据并存储至S波段数传机内,遥测数据显示信息存储条数不断增加(图19),这标志着SSS-1卫星与SSS-2A卫星的星间通信任务取得成功。
3.5 对地遥感相机
2022年3月起,SSS-1卫星开始开展对地相机遥感成像的功能验证工作。北航团队在春分点前后上行了程控指令,控制卫星在南极洲附近海域执行对地成像工作,成像点位置为西经101°、南纬75°,具体拍照时间为3月21日6:50(北京时间),此时太阳高度角为7.5°,满足成像要求。遥感成像图和成像位置如图20和图21所示。遥感图像的成功回传与解码标志着对地相机的功能验证工作取得圆满成功。
4 卫星关键技术评估
SSS-1卫星的设计、研制和在轨试验中,涉及了多项独特的创新技术,结合卫星在轨试验验证,可对其进行综合评估。
1) 盘绕式伸展臂的锁紧释放和展开控制
SSS-1卫星盘绕式伸展臂的锁紧与释放,采用了以记忆合金为驱动力的拔销器设计,结构简单可靠,无火工品,因此解锁冲击小。发射状态下,销子伸出,通过锁紧连杆保证盘绕式伸展臂处于收拢锁紧状态;卫星入轨后,拔销器通电储能至20 J,销子收缩从而实现解锁释放。同时,为使盘绕式伸展臂解锁后能平稳受控展开,采用了一根高强度柔性绳索来控制其展开运动。绳索一端固定在伸展臂顶端,另一端连接旋转阻尼器以限制展开速度,并保证展开过程平稳。
在轨遥测数据显示,盘绕式伸展臂收到指令后迅速完成解锁,并且按预定要求逐层展开,在大约30 s左右时间,即实现了2 m伸展臂的完全展开,整个过程十分平稳顺利。由于处于在轨失重状态,展开时间比地面稍快(地面完成展开需约45 s时间),此结果也符合预计。上述在轨试验和遥测数据,说明SSS-1采用的盘绕式伸展臂锁紧释放和展开控制技术非常成功。
2) 柔性桁架连接航天器姿态控制
SSS-1卫星的盘绕式伸展臂是一种柔性桁架,刚度较低,容易发生弯曲及扭转振动,从而对整星姿态产生干扰。针对SSS-1卫星柔性桁架连接的特点,姿控系统采用“刚体-挠性体-刚体”构型的卫星姿态跟踪模型,通过引入挠性振动项的方式将伸展臂的弯曲和扭转模态考虑其中,并在此基础上形成了基于非线性补偿器的鲁棒控制算法[15-16]。
在轨遥测数据显示,卫星长期处于对日定向模式(SPM),姿态精度≤0.02°,姿态稳定度≤0.01(°)/s,远超原有要求。上述在轨数据说明SSS-1卫星的姿控算法及硬件系统可以有效考虑柔性桁架的振动特性,实现高精度控制。此外,SSS-1卫星的姿控计算机内部预留了程序上注模块,为后续多种姿控算法的空间验证提供了试验平台。
3) 复杂结构系统优化
SSS-1卫星载荷数目众多且各设备技术状态复杂(由国际合作项目的特点决定),而结构系统重量预算极其有限。在这种情况下,SSS-1卫星结构设计使用二级多点近似优化方法,完成了主承力底板构型优化、箱板加筋布局优化等工作,极大地减轻了结构重量[8-10]。
SSS-1卫星入轨后,遥测参数显示各设备均正常工作,表明优化后的结构经受住了运载主动飞行段恶劣力学环境的考核,保护了星内设备免遭破坏。此外,SSS-1卫星共装载6个有效载荷,功能密度极高。结构系统根据各载荷的接口需求逐一进行了适应性改进,尤其是与盘绕式伸展臂进行了耦合设计。在轨试验表明,所有载荷均正常工作,体现了结构设计的合理性与有效性。
4) 星间通信与基于wifi频段的数传
SSS-1卫星装载了低功耗、轻量化的星间通信机,由于搭载于同一运载,它与一起发射的SSS-2A保持了2个多月的较近距离编队飞行,利用此有利条件,成功实现了SSS-1和SSS-2A的在轨星间通信,这对于微小卫星而言是极具挑战的试验,说明本项目的星间通信试验设计十分巧妙。另外值得一提的是,本次星间通信试验的采用了wifi信号频段,同时SSS-1卫星还采用此频段进行星地数据/图像传输,这一频段易受到地面wifi信号的干扰,但在轨卫星间的通信和图像星地数传的都得到了成功,这项试验为小卫星和技术试验卫星的数据传输尝试扩展了新的频段。
5) 电推进试验
SSS-1卫星的电推进装置目前已完成点火自检工作。在轨数据显示,设备开机后,电压、电流以及占空比等相关遥测参数均显示正常,体现了电推进装置良好的工作状态。另外,在电推进器点火瞬间,动量轮转速产生明显跳变,也侧面验证了微小推力的产生,为后续的推力测定试验打下了良好基础。
5 结束语
SSS项目是写入《2016中国的航天》白皮书的重要国际航天合作项目,SSS-1卫星的成功发射和在轨运行是APSCO各成员国通力合作的成果,起到了亚太地区空间技术合作的纽带作用;同时SSS-1也是一颗旨在航天人才培养的学生卫星,展示了北京航空航天大学在亚太地区国际空间科学与技术教育领域的引领作用。SSS-1卫星研制过程中,国内外学生承担了大量的工作,积累了宝贵的工程经验和案例,后续可望形成更完善航天科技教育体系,以服务于国内外航天人才的培养,进一步促进亚太地区空间科学和技术的合作。
