电动静液压主动悬架自适应Smith反馈时滞控制*
2022-11-04寇发荣张海亮许家楠田海波彭先龙
寇发荣,张海亮,许家楠,田海波,彭先龙
(西安科技大学机械工程学院 西安,710054)
引言
主动悬架具有良好的减振性能,符合当今人们对汽车舒适性、安全性的要求,所以近些年主动悬架成为汽车悬架研究的重点课题[1-5]。EHA作动器具有功率密度大、调节范围广的优点,在主动悬架控制领域已有很多研究。
EHA作动器工作时,由于传感器信号的测量传输、控制器控制策略的处理运算以及液压部件产生主动力都存在时滞,故会影响悬架动态特性。文献[6]研究了时滞与半主动悬架动态稳定特性的关系,提出了悬架系统临界时滞求解的数值计算方法。文献[7]计算了EHA悬架系统的临界时滞,分析了时滞对EHA悬架性能的影响。文献[8]提出了一种改进型Smith预估补偿器,结合模糊控制实现EHA悬架的时滞补偿。目前,关于悬架时滞的研究主要集中在设计时滞补偿控制方案,以减小其对悬架动态性能的影响[9-10]。但在实际系统中,一定量小时滞不但不会引起悬架系统失稳,还可以改善悬架动态性能,因此可采用时滞反馈控制提高汽车悬架系统的减振性能。
首先,笔者从EHA悬架时滞特性出发,分析临界时滞下时滞对悬架系统动态特性的影响;其次,根据遗传算法优化得到EHA悬架系统最优时滞反馈系数及时滞量,以此为最优时滞反馈模型,设计自适应Smith反馈时滞控制策略;最后,进行仿真分析并开展台架试验,验证该控制策略的可行性。
1 含时滞EHA主动悬架动力学模型
1.1 EHA主动悬架结构与原理
EHA主动悬架主要由EHA作动器与弹性元件构成,其结构原理如图1所示,其中EHA作动器由电机、控制器、液压部件等组成。车辆在路面行驶时,受到路面激励使车桥振动,振动通过作动器与弹性元件传递给车身,引起车身振动。传感器检测到来自车桥与车身的位移和加速度信号,将信号传递到控制器中。控制器控制电机的转向和转速,并通过联轴器传递到液压部件,调节液压缸产生的可控阻尼力大小,实现主动控制,衰减车身振动[11]。

图1 EHA主动悬架结构原理Fig.1 Structure and principle of EHA active suspension
1.2 含时滞的EHA主动悬架力学模型
建立1/4车辆二自由度主动悬架动力学模型,如图2所示。

图2 1/4车辆二自由度主动悬架模型Fig.2 1/4 vehicle 2-DOF active suspension model
根据牛顿运动定理得到含时滞EHA车辆主动悬架二自由度动力学方程为

其 中:m1为非簧载质量;m2为簧载质量;kt为轮胎刚度;ks为悬架弹簧刚度;x1为非簧载质量位移;x2为簧载质量位移;z为路面激励;cs为基值阻尼;τ为延时环节时滞量;Fr(t-τ)为存在时滞量为τ的延时环节下EHA作动器在t时刻主动控制时产生的可控阻尼力。
2 EHA主动悬架临界时滞下稳定性分析
2.1 EHA主动悬架临界时滞
悬架系统的临界时滞是系统由渐进稳定状态转变为不稳定状态的临界点,系统时滞超过临界时滞则会导致系统失稳。根据时滞微分方程理论,悬架系统的微分方程解的形式为

其中:Xi为xi经过拉氏变换的变量,i=1,2;λ为特征值。
将式(2)代入式(1),根据微分方程解的存在条件得到非零特征方程为

其中:cr为作动器可控阻尼。
由Lyapunov稳定性判据可知,时滞系统临界失稳的条件是特征方程(3)仅有纯虚根λ=iω,即系统失稳后将进行以固有频率ω为基频的自激振动[12]。将λ=iω代入式(3),利用欧拉公式分离实部与虚部,可得特征方程(3)仅有纯虚根的存在条件为

求解式(4)得到EHA主动悬架系统的临界时滞计算公式为

将表1的EHA悬架主要参数代入式(5),得到不同基值阻尼下可控阻尼cr与临界时滞τ的关系,如图3所示。

图3 可控阻尼与临界时滞的关系Fig.3 Relationship between controllable damping and critical delay

表1 EHA悬架主要参数Tab.1 Main parameters of EHA suspension
由图3可知,基值阻尼一定,可控阻尼大于零时,临界时滞随可控阻尼的正向增大而减小;当正向可控阻尼趋于无穷大时,临界时滞趋于某一较小值;当正向可控阻尼足够小时,系统进入某一确定时滞稳定状态。基值阻尼一定,可控阻尼小于零时,临界时滞随可控阻尼的负向增大而减小;当负向可控阻尼趋于无穷小时,临界时滞趋于某一较大值;当负向可控阻尼足够大时,系统进入某一确定时滞稳定状态。且同基值阻尼下,正向可控阻尼的临界时滞量总大于负向可控阻尼的临界时滞量。
当悬架系统时滞为小时滞时,系统并不会发生失稳,且临界时滞随着可控阻尼的变化而变化,即主动控制过程中时滞具有时变特性。
2.2 临界时滞下稳定性分析
为分析临界时滞下小时滞对EHA主动悬架动态特性的影响,在Matlab/Simulink环境中建立仿真模型。
仿真分析比较在无时滞理想控制(τ=0)、小时滞(τ=0.1)及临界时滞(τ=0.35)这3种情况下悬架的动态特性,分别得到3种情况下悬架系统簧载质量加速度、悬架动挠度及轮胎动载荷与时滞的关系,如图4~6所示。计算每种情况下EHA主动悬架簧载质量加速度、悬架动挠度及轮胎动载荷的均方根值(root mean square,简称RMS),结果如表2所示。

图4 簧载质量加速度与时滞关系Fig.4 Relationship between acceleration of sprung mass and time delay

图5 悬架动挠度与时滞的关系Fig.5 Relationship between suspension dynamic deflection and time delay
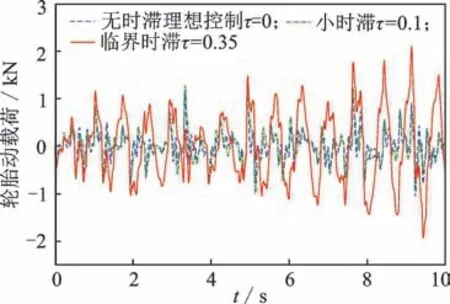
图6 轮胎动载荷与时滞的关系Fig.6 Relationship between tire dynamic load and time delay

表2 不同时滞下悬架动态性能均方根值Tab.2 RMS of dynamic performance of suspension with different delays
分析图4~6及表2可知,当延迟环节时滞量τ大于等于临界时滞时,时滞量τ的递增总会恶化簧载质量加速度、悬架动挠度及轮胎动载荷,从而恶化悬架动态性能;但当延迟环节时滞量τ处于小时滞情况下时,时滞量τ的递增虽然仍会恶化簧载质量加速度,但会适当衰减悬架动挠度、轮胎动载荷,一定程度改善悬架动态性能。
因此,可将时滞量τ限定在小于临界时滞的一定范围小时滞下,达到提升悬架动态性能的目的。
3 EHA主动悬架自适应Smith反馈时滞控制
3.1 时滞反馈控制
由临界时滞下稳定性分析可知,小时滞情况下,时滞量τ会一定程度改善悬架动态性能,所以可采用时滞反馈控制,将客观因素时滞转化为主动控制变量来提高汽车悬架系统的减振性能。
时滞反馈控制是将时滞作为设计参数并利用其进行控制反馈,通过调整时滞反馈系数g和时滞量τ的大小,减小系统的振动,以取得良好的系统性能和控制效果。采用时滞反馈控制后,系统的运动方程为

将式(6)无量纲化,得到无量纲方程组(7)为
将式(7)进行傅里叶变换为

其中:A11=-ω2+1+jω;A12=-1-jω+gke-jτω;A22=-ω2+α(1+γ)+j(1+β)αcω-αgke-jτω;A21=-α-jαcω。
EHA主动悬架系统时滞反馈控制的目标是使汽车获得较高的平顺性和操纵稳定性,即要尽可能地减小簧载质量加速度。故选取减振效果最优的时滞反馈系数g和时滞量τ,将簧载质量加速度对路面输入的幅频特性作为目标函数J(g,τ),即

时滞反馈系数g的约束条件为不大于被动刚度的两倍,时滞量τ约束条件为小于临界时滞量,即

用遗传算法优化对目标函数进行优化分析,得到最优控制参数g=293,τ=0.14。
3.2 自适应Smith时变时滞补偿
传统的Smith补偿控制策略是给系统的控制回路并联一个反馈环节(预估补偿器),将延迟时滞量τ提前送入控制器,从而抵消系统受时滞的影响。但其只适用于定时滞系统的补偿控制,对于EHA主动悬架系统,在悬架实际工作中由于作动器会根据复杂路况实时调节可控阻尼,导致系统的时滞具有时变特性,所以传统Smith补偿控制无法适用于EHA主动悬架系统。
自适应Smith时变时滞补偿控制系统如图7所示。其中:R(s)为控制器参考输入;Y(s)为系统输出;Gc(s)为悬架控制器模型;Gm(s)为理想的补偿模型;Gp(s)e-τs为实际有时滞的系统模型。在自适应Smith时变时滞补偿控制中,用乘法器代替了传统Smith补偿控制中的补偿环节,补偿模型Gm(s)经过乘法器输出,与实际模型Ym′(s)输出Y(s)作差得到e(s),经过积分器后再接入乘法器,形成针对时变时滞补偿的自适应Smith补偿控制器。
由图7分析可得下列各式
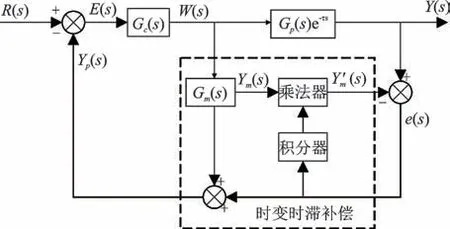
图7 自适应Smith补偿控制系统Fig.7 Adaptive Smith compensation control system
由式(11)和(12)得

故当s→0时,e(s)=0,得到理想补偿模型的等效传递函数

由式(15)可知,当时变时滞引起实际模型Gp(s) 输出发生变化,从而造成与对象模型Gm(s) 输出不相等时,系统能自适应地调节对象模型Gm(s) 的输出,使两者输出之差快速逼近零,消除时变时滞造成的控制信号偏差。
3.3 自适应Smith反馈时滞控制器
自适应Smith时滞反馈控制原理如图8所示。路面输入激励传递到1/4车辆悬架模型,一方面通过外环控制器计算出悬架系统需要的理想主动力Fr,由于时变时滞的存在导致实际输出的主动力为含时滞主动力;另一方面以最优时滞反馈模型为补偿参考,通过自适应Smith补偿控制器实时估算悬架不同工作状态下需要的补偿量ΔF,估算出的主动力补偿量ΔF对含时滞主动力Fr′进行求和补偿得到补偿后的控制力Fr″。Fr″通过EHA作动器的力模型,根据控制信号的调节输出经过补偿的主动力。

图8 自适应Smith反馈时滞控制原理Fig.8 The principle of adaptive Smith feedback time-delaycontrol
在EHA主动悬架自适应Smith时滞反馈控制器中,外环控制算法为悬架控制系统的核心,起到计算悬架系统所需理想主动力的作用,是提高悬架动态性能的基础。但由于作动器时变时滞的存在,实际输出的力为经时滞影响后的含时滞主动力,就会降低主动悬架的控制效果,自适应Smith时滞反馈控制器针对此问题以最优时滞反馈模型对时滞主动力进行补偿,该控制方法对两个不同对象的控制结合,实现最优的悬架控制效果。
4 仿真分析
4.1 时域分析
在Matlab/Simulink中以C级路面下车速为40 km/h的随机路面作为路面谱输入,建立EHA主动悬架系统仿真模型。
为了验证EHA主动悬架自适应Smith反馈时滞控制的效果,对比仿真分析自适应Smith反馈时滞控制(称为控制策略Ⅰ)与外环线性二次高斯(linear quadratic Gaussian,简称LQG)无时滞控制(称为控制策略Ⅱ)的悬架动态性能。簧载质量加速度、悬架动挠度及轮胎动载荷的时域响应如图9~11所示,各控制策略下悬架性能均方根值对比如表3所示。
由图9~11和表3分析可知,在40 km/h的C级随机路面作用下,控制策略Ⅰ和控制策略Ⅱ均能优化簧载质量加速度、悬架动挠度及轮胎动载荷。但控制策略Ⅰ相比于未控制簧载质量加速度降低18.26%,悬架动挠度降低20.83%,轮胎动载荷降低9.4%;控制策略Ⅱ相比于未控制簧载质量加速度降低7.29%,悬架动挠度降低8.31%,轮胎动载荷降低7.10%。故控制策略Ⅰ对悬架动态性能提升更大。
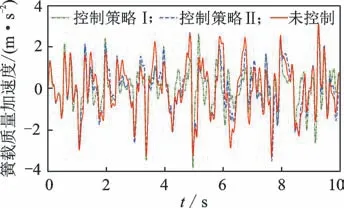
图9 簧载质量加速度时域响应Fig.9 Time domain response of sprung mass acceleration
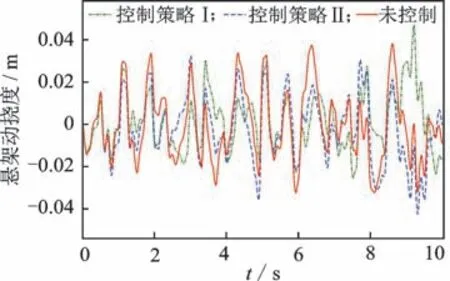
图10 悬架动挠度时域响应Fig.10 Time domain response of suspension dynamic deflection
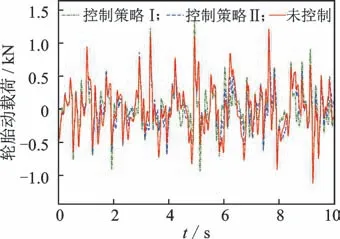
图11 轮胎动载荷时域响应Fig.11 Time domain response of tire dynamic load

表3 悬架性能均方根值对比Tab.3 RMS comparison of suspension performance
4.2 频域分析
从频域角度分析控制策略效果,对簧载质量加速度、悬架动挠度及轮胎动载荷的时域结果进行处理,得到其功率谱密度响应如图12~14所示。以人体垂直敏感频率范围4~12.5 Hz内均方根值的改善程度作为频域分析的评价标准,频域响应下悬架性能均方根值如表4所示。
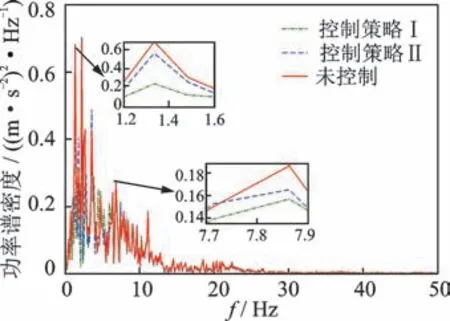
图12 簧载质量加速度功率谱密度响应Fig.12 Power spectral density response of sprung mass acceleration
由图12~14和表4分析可知,在人体垂直敏感频率范围4~12.5 Hz内,控制策略Ⅰ和控制策略Ⅱ控制下的悬架系统簧载质量加速度、悬架动挠度和轮胎动载荷的功率谱密度相比未控制时均有所减小。控制策略Ⅰ相比于未控制簧载质量加速度功率谱密度均方根值减小11.16%,悬架动挠度功率谱密度均方根值减小16.21%,轮胎动载荷功率谱密度均方根值减小6.04%;控制策略Ⅱ相比于未控制簧载质量加速度功率谱密度均方根值减小8.96%,悬架动挠度降低5.4%,轮胎动载荷降低2.43%。控制策略Ⅰ和控制策略Ⅱ对频域响应下簧载质量加速度和悬架动挠度均有明显改善,且控制策略Ⅰ对悬架动态性能提升更大。并且控制策略Ⅰ相比于控制策略Ⅱ最高峰值减小,整体趋势更为稳定。

图13 悬架动挠度功率谱密度响应Fig.13 Power spectral density response of suspension dynamic deflection

图14 轮胎动载荷功率谱密度响应Fig.14 Power spectral density response of tire dynamic load

表4 频域响应下悬架性能均方根值对比Tab.4 RMS comparison of suspension performance in frequency response
5 EHA主动悬架台架试验
通过搭建EHA主动悬架的台架试验系统,进行时滞控制试验来验证自适应Smith反馈时滞控制的有效性。
主动悬架台架试验系统如图15所示,主要由电动激振台、上下横梁、滑块导轨机构、簧载质量配重块、减振器、螺旋弹簧、传感器、控制器、电动静液压作动器以及数据采集处理系统等组成。试验中电动激振台提供模拟路面输入,上横梁与簧载质量配重块为模拟簧载质量,下横梁与电动静液压作动器、液压缸为模拟非簧载质量,上横梁上方的传感器监测到的加速度信号为簧载质量加速度。
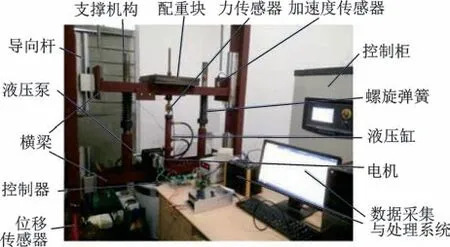
图15 EHA主动悬架台架试验系统Fig.15 EHA active suspension bench test system
以C级随机路面作为输入,对自适应Smith反馈时滞控制下EHA主动悬架的加速度与无控制下进行对比,试验采样时间取5 s,对簧载质量加速度数据进行分析,得到随机路面下簧载质量加速度响应如图16所示。

图16 随机路面下簧载质量加速度响应Fig.16 Response of sprung mass acceleration on random road
由图16可知,C级随机路面激励下,未控制时簧载质量加速度均方根值为1.486 7,自适应Smith反馈时滞控制下簧载质量加速度均方根值为1.131 8,与未控制相比减小了23.87%。试验结果与仿真结果基本一致,验证了EHA自适应Smith反馈时滞控制的有效性,表明EHA自适应Smith反馈时滞控制能够提高车辆的行驶平顺性。
对两种控制下的悬架进行频域响应分析,进一步验证EHA自适应Smith反馈时滞控制策略的有效性,得到随机路面下簧载质量加速度频域响应,如图17所示。
由图17可知,在0~30 Hz范围内,自适应Smith反馈时滞控制能有效降低车身加速度的均方根值,且整体趋势更为稳定。尤其在人体垂直敏感频率范围4~12.5 Hz内,自适应Smith反馈时滞控制能够明显降低频率段峰值,衰减车身垂直振动,提高乘坐舒适性。

图17 随机路面下簧载质量加速度频域响应Fig.17 Frequency domain response of sprung mass acceleration on random road
6 结束语
提出了一种自适应Smith反馈时滞控制策略。在分析电动静液压主动悬架结构与原理的基础上,根据时滞微分方程理论推导出电动静液压主动悬架临界时滞的计算公式。将电动静液压主动悬架的具体参数代入临界时滞的计算公式,分析不同时滞对簧载质量加速度、悬架动挠度及轮胎动载荷的具体影响。设计自适应Smith反馈时滞控制,对时滞主动力进行补偿。在Matlab中对比仿真分析自适应Smith反馈时滞控制与外环LQG无时滞控制的悬架动态性能,验证电动静液压主动悬架自适应Smith反馈时滞控制的效果。通过开展电动静液压主动悬架时滞控制试验,验证了自适应Smith反馈时滞控制的有效性。