准噶尔盆地南缘激光LiDAR航测质量控制及效果
2022-11-04田洪辉李建华杨万祥魏晨成
田洪辉,李建华,杨万祥,魏晨成
1.中油勘探监理涿州有限责任公司 库尔勒分公司(新疆 库尔勒 841000)2.中国石油新疆油田分公司 勘探事业部(新疆 克拉玛依 834000)
0 引言
为给油气勘探开发提供高精度地理信息资料,2021年新疆油田在准噶尔盆地南缘整体部署了9 680 km2高精度地表信息采集激光LiDAR航摄项目,2021年及以后年度分期实施。
本项目地处准噶尔盆地南缘,行政隶属于乌鲁木齐、呼图壁、石河子、沙湾、奎屯等地区。工区地势南高北低,地表沟壑纵横、地形复杂;地貌类型多样,主要为河道、冲沟、峡谷、陡峭山地,山前带主要为村镇、厂矿、农田等,属于测绘困难区域[1]。
1 激光雷达技术简介
激光LiDAR航摄系统,由激光测距仪、GNSS、IMU、计算机控制导航系统、数码相机组成。激光扫描仪发射激光脉冲,遇目标物反射后,激光接收器记录返回激光脉冲,通过激光脉冲从发射到目标物反射回波的延迟时间,测定发射点到反射点之间的距离,获取具有三维坐标(X,Y,Z)和一定属性(反射强度等)的三维点云数据,通过点云生成DEM数据(数字高程模型)[2],通过数码相机获取高清正射影像数据(DOM)[3]。
飞行采集结束后,对原始数据进行一系列处理,包括POS数据精密解算、点云分类[4]、影像校正拼接[5]、坐标系统转换、高程转换等工作,制作完成DOM和DEM数据体,将DEM数 据、DOM数 据 和GNSS数据融合,获得最终的三维空间数据。
2 难点分析
1)地质任务要求高。要求“提供高精度的浅表地层展布、断层以及地形地貌等信息数据,能精准分析工区的地层和岩性分布特征”。如何获得高清晰度、高精度三维空间数据,确保地质任务完成,是质控工作的重中之重。
2)受飞机空间和飞行安全限制,飞行过程中,航摄指标和飞行参数监督不能实时监控,质控难度大。
3)山地天气变化莫测,影响采集质量。工区面积大,南缘山地天气变化异常,大风、阴雨难以预测,云层厚度随时变化,相对航高850 m采集航摄资料,质量受天气影响大。
4)海量航测数据,实时监控采集质量难度大。每天的地面基站原始数据、POS数据、点云数据、影像数据等海量数据,数据预处理时间长,实时监控采集质量难度大。
3 激光LiDAR航摄质控过程
3.1 精细、优化分区质控
地形高程变化对影像分辨率和飞行安全有很大影响,合理、科学分区是获得优质航摄数据、安全施工的基础。
3.1.1 分区质控要点
1)考虑地面高差突变和地形特征,综合划分航摄分区[6]。
2)分区内的地形高差不大于¼相对航高。
3)分区内的地貌类型尽量一致。
4)每个分区布设至少一条构架线,保证数据的整体精度、一致性。
3.1.2 分区质控过程
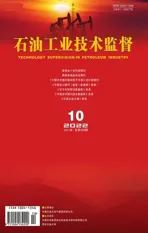
通过认真踏勘工区,了解工区地表、地貌特征,依据30 m格网DEM(高程数字模型),分析地形起伏,高程变化,飞行安全条件,结合航摄采集要求,将A、B、C三个测区划分为14个子分区(图1),共布设240条航线,17条构架航线,航线总长度7 997 km。

图1 B区霍尔果斯背斜及以南剖面测区航线布设示意图
工区高程变化分析详细,分区合理,航线布设科学,构架线将子分区有机结合,为整个工区获取优质航摄数据奠定了基础。
3.2 相控点质控
相控点是直接为摄影测量控制点加密或测图需要在实地布设、测定的控制点。野外相控点目标选址的好坏、点位的准确程度、解算精度以及相控点的分布直接影响航摄质量。
3.2.1 相控点(地面检查点、标靶点)质控要点
1)选址:可以明确辨认的地物点或目标点,四周平坦,无明显反射物,周围黑白反差不大,避开有阴影地物以及弧形地物。
2)标志:对空视角好,避免被建筑物、树木等地物遮挡。
3)布设:采用红漆喷涂成“L”型,分布尽量均匀。
4)解算:相控点的平面坐标和高程采用实时差分定位(RTK)或者CORSRTK(网络RTK)方法测定[7],关注RTK解算精度各项指标[8]。
3.2.2 相控点质控过程
全区布设地面相控点361个,标靶点35个(图2)。通过软件展点,相控点分布相对均匀,覆盖整个工区。现场抽查,相控点观测方法正确,操作仪器规范,选点合理。通过SSoffice软件,复算相控点GNSS采集原始数据,各项指标、解算精度[9],满足规范要求,测量成果正确,为获取高精度三维空间数据提供了依据[10]。
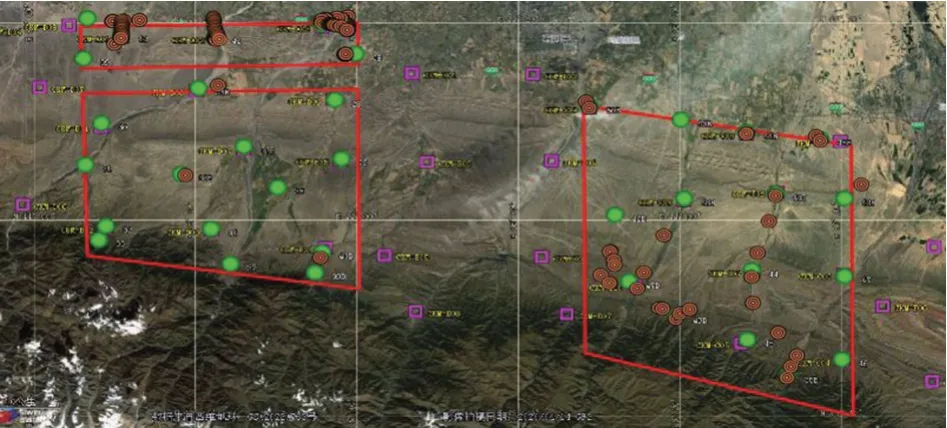
图2 相控点(标靶点)分布示意图
3.3 航测采集质量控制
受飞机空间和飞行安全影响,航摄采集质量实时监控难度大。对此,加强培训,强化飞行员和航摄员的质量意识。每天飞行作业前,认真检查航摄设备指标,飞行参数。飞行采集过程中,实时监控飞行指标,定时对飞行参数、航摄指标截屏并留存,掌握每个飞行任务的航摄质量。
3.3.1 动态校准
进入测区之前,检查系统各部分组件运行状态,飞一个“8”字做动态校准,确保进入测区平稳飞行,飞行参数满足施工要求(图3)。

图3 动态校准
3.3.2 航速控制
进入测区,航速要保持一致,在一条航线内飞机上升及下降速度变化不大于10%。
3.3.3 飞行姿态
俯仰角、侧滚角一般不大于2°,最大不超过4°,航线弯曲度(航线最大弯曲矢量与航线长度之比的百分数)不大于3%(图4)。

图4 飞行姿态实时监控
3.3.4 航迹数据分析
导出文本航迹文件(图5),检查飞行参数(航向、航高、航速),抽取俯仰角、侧滚角超过4°,按坐标展点检查;确保有效数据符合规范要求。

图5 航迹分析
3.3.5 自证照片(截屏)质控
检查POS面板、导航面板、航迹面板,GPS、Scanner、Camra等几个面板截屏。
1)相机状态栏关注曝光次数、丢失曝光数量、丢片数量等(图6)。
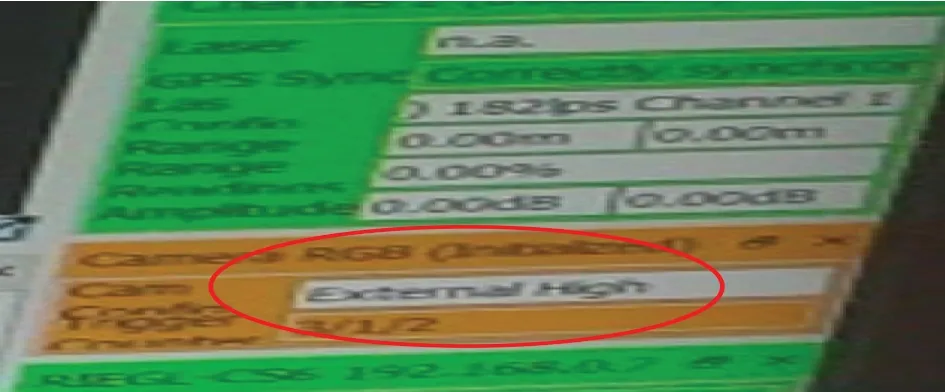
图6 相机状态
质控要求:飞机降落后要延长记录至少5 min才能关闭系统,确保数据完整。
2)INS-GPS状态栏的Yaw Accacury一栏,精度值必须0.075°以内。
3)扫描仪(Scanner)状态栏重点关注GPS同步,指示灯正常时才可采集(图7)。

图7 GPS信号和惯导系统的工作状态
3.3.6 消除天气因素影响
天气对飞行安全和航测影像质量影响极大。要与气象部门积极沟通,搜集计划飞行任务区域天气预报,实时掌控天气变化情况。阴雨、大风、云层厚度大、能见度小于5 km等天气禁止采集,云层遮挡造成阴影要求补飞(图8)。

图8 层遮挡阴影补飞效果
3.3.7 补飞或重飞
飞行采集期间及时对数据进行检查评价,发现有激光漏洞、影像缺失及时补飞,以下情况需要补飞或重飞:
1)POS系统局部数据记录缺失。
2)数据质量存在局部缺陷,影响点云的精度或密度。
3)飞行数据出现绝对漏洞。
施工过程中,认真检查飞行指标、航摄参数、影像清晰情况,对存在问题的数据,要求及时补飞或重飞,并予以落实。补飞统计如下:
1)A区无补飞。
2)B区共补飞26条航线,共409.1 km、218 km2、1 549幅影像。
3)C区共补飞14条航线,共107 km、55 km2、431幅影像。
4 数据预处理的质控
4.1 影像数据质控
4.1.1 质控关键点
影像片数是否与设计相符,是否覆盖整个测区,影像航向和旁向重叠度,影像画面质量。
4.1.2 质控过程
1)通过每日自检记录表,对比影像获取数据与设计航线数据。
2)通过每日影像列表文件,抽取拍摄坐标,展点检查漏拍,点位不均匀现象(图9);从航线距、照片点距判断影像航向、旁向重叠度。抽查航线抖动较大区域,针对漏拍、云层遮挡、影像有阴影等航摄不合格的影像,及时要求补飞。
图9 展点检查影像分布
3)通过质量检查报告(表1),检查影像数量、影像重叠度。
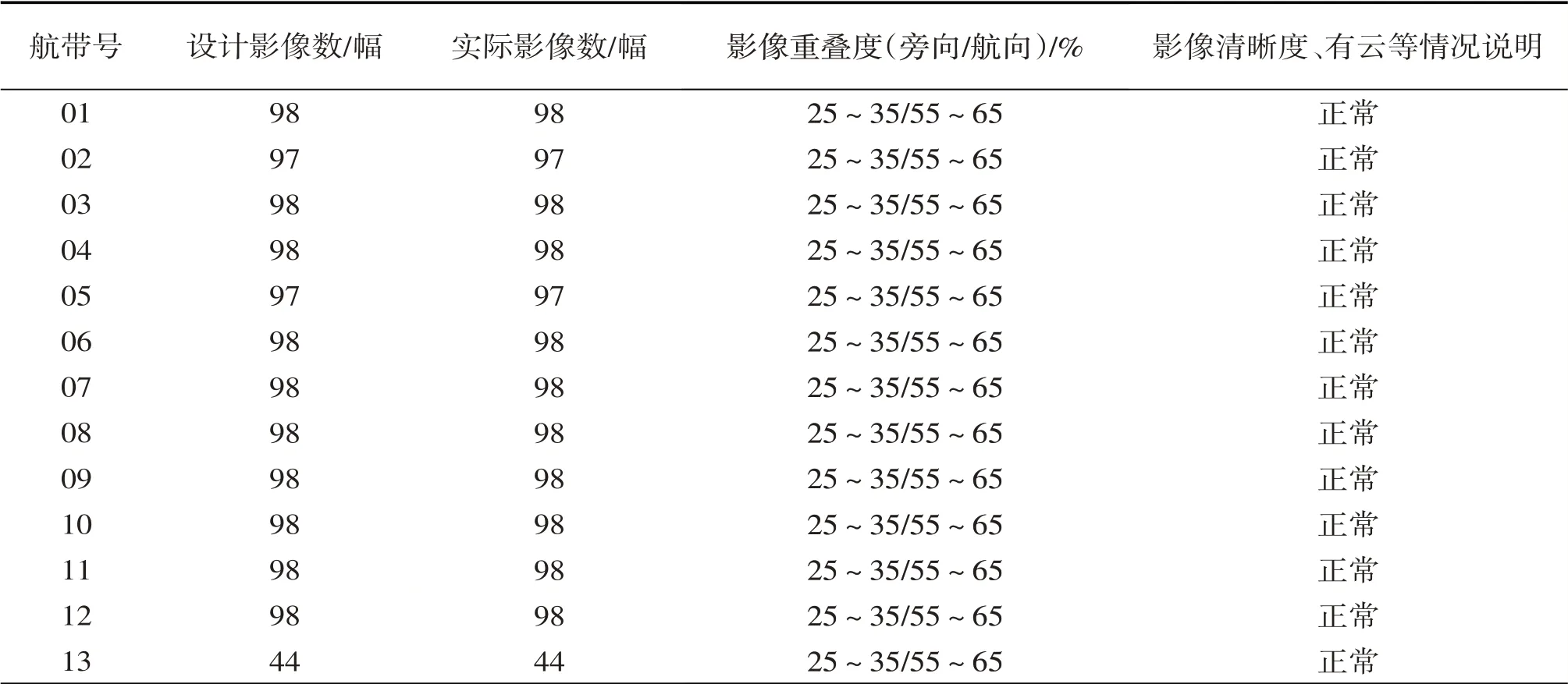
表1 A1分区影像质量检查报告
4)抽查:抽查部分影像清晰情况,尤其含标靶点像片的清晰度。抽查影像重叠度(航向、旁向重叠)(图10)。跟踪、落实不合格影像的后续补飞,确保飞行采集效果。

图10 抽查影像重叠度(航向重叠度62%)
4.1.3 质控小结
项目运行过程中,共获取33 642张影像,最终获取的原始影像清晰、层次分明、颜色饱和,反差适中,航向重叠、旁向重叠度满足设计要求;质量不合格的影像进行了重新补飞,确保整个项目的采集质量。
4.2 POS数据质控
POS数据是定位、定姿数据,是IMU/DGPS组合的高精度位置与飞行姿态测量系统。
4.2.1 POS数据质控点
航迹与基站的距离、POS解算精度、航高保持。
4.2.2 POS数据质控过程
1)检查航迹图(图11)、航高图、精度曲线图。

图11 航迹图分析
2)与设计航高差保持控制在15 m以内。B1区航高2 000 m,B3区航高2 800 m,检查本架次飞行航高与设计航高误差±15 m之内,满足规范和设计要求(图12)。
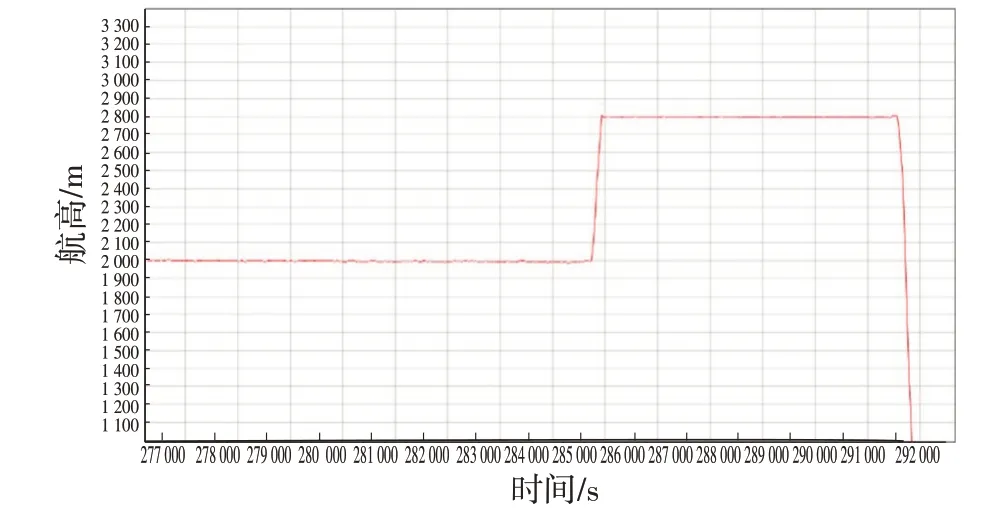
图12 B1区、B3区航高分析
3)按日期分析POS数据,使用POSPAC软件解算北、东、下方向位置均方根误差(图13)。
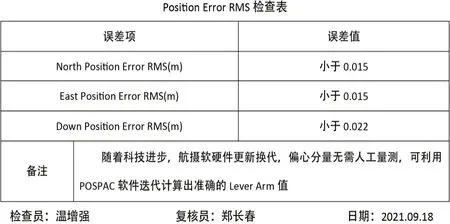
图13 POS数据解算质量报告
4.2.3 小结
通过对14份POS数据解算报告分析,检查每次飞行任务航迹图、航高图,POS解算误差指标、飞行航高保持等,各项指标均满足设计要求。
4.3 点云数据质控
4.3.1 质控点
点云密度、点云覆盖完整性、点云接边、点云航带间重叠度、航带间高差等。
4.3.2 质控方法
1)图件分析。从分区点云图件、整体图件入手,检查点云密度、覆盖完整性、航带高差(图14)及航带重叠情况(图15)。依据地面布设标靶点或检查点,检查航带间高差。

图14 点云航带间高差检查

图15 点云航带重叠检查
2)点云数据检查。使用软件检查每天飞行航线及每个细化分区的点云原始数据,计算相应点云密度(图16),航带重叠度。发现有激光漏洞、数据缺失,及时补飞或重飞。

图16 抽查点云密度为10.674点/m2
3)通过施工方质量检查报告(表2),检查每天航带的点云密度、航带重叠度、航带高差。

表2 质量检查报告
4)抽查部分航线或航飞范围的点云数据,检查航带重叠度、激光数据覆盖情况(图17)、点云密度等指标。

图17 抽查点云数据覆盖情况
5)落实补飞及重飞采集点云数据质量。
4.3.3 小结
按日期、飞行分区检查当日点云数据,对不合格区域细化分区、调整航高等措施进行补飞。检查结果:航带间高差、各分区点云密度、航带重叠度,点云覆盖完整,满足设计指标要求。
5 质控效果
野外数据采集,按照飞行任务、架次,及时分析检查影像数据、点云数据、POS数据。各项指标从日统计到分区统计均完成了设计要求。
1)影像质量:原始影像清晰、层次分明、颜色饱和,反差适中;航向、旁向重叠度均优于设计要求。
2)激光LiDAR质量:LiDAR点云均匀,覆盖完整,无漏洞。各分区点云密度均高于设计的8.27点/m2。
3)POS数据质量:数据接收正常,信号无周跳、失锁。POS数据经POSPAC软件解算后,北、东方向位置均方根误差,满足设计要求。
4)地面GPS基站:地面基站GPS接收卫星连续、无周跳、失锁等情况,数据完整。
6 结束语
1)激光LiDAR航测技术已成为高精度三维对地形观测的主要手段之一,通过激光LiDAR航测获取的三维数据体,能够实现地质露头的三维数字化,提供高精度的浅表地层展布、断层以及地形地貌等信息数据,精准分析地层和岩性分布特征。
2)航测三维空间数据已充分运用在辅助地震勘探优化施工设计、施工流程,复杂区域激发点优化设计,指导物理点放样、质量监控、环境管理、安全施工等方面,为实现精细、高效、优质地震勘探发挥积极作用。
3)航测三维数据体以其高清数字影像、高精度DEM模型,在油田地面工程建设、钻井选址、城市规划等方面亦可提供很大助力。