基于DSP的开关磁阻电机直接转矩控制系统设计与实现
2022-11-02胡春龙
胡春龙
(陕西国防工业职业技术学院, 陕西 西安 710300)
0 引 言
开关磁阻电机(switched reluctance motor,SRM)最早是以磁阻式电机的形式出现的,兼具有交、直流电机的优良特性[1]。近年来,针对SRM提出了多种控制方法。文献[2-3]提出了一种直接瞬时转矩控制方法,无需观测定子磁链,直接依据开通与关断角划分扇区,但无法限制换向区相电流,电流峰值较大。文献[4]提出了PWM调制方法,通过对各相绕组电压占空比实时调整来得到最优的电压空间矢量,但功率器件开关频率大,损耗大。文献[5]提出了一种电压空间矢量控制,按照转子磁链定向,通过坐标矢量变换实现了励磁电流与转矩电流的解耦,但系统性能受电机参数影响较大,且较难观测到转子磁链。
本文提出了一种Bang-Bang调节下的直接转矩控制方法,以定子各相绕组的三种电平状态组成电压空间矢量,依据转矩、磁链的变化量通过Bang-Bang控制实时选择出最优的电压空间矢量,从而达到对转矩的直接控制。这种方法有效避免了SRM复杂的数学模型和非线性等问题,降低了转矩脉动。
1 SRM直接转矩控制原理
SRM的双凸极结构决定了各相工作的独立性,以A相为例,设定子绕组连接在不对称半桥式功率变换器的一路输出上,如图1所示。

图1 SRM结构原理(A相)
从图1可知:当开关管S1、S2同时闭合时,A相绕组得到正电压U,用“1”来表示;当S1、S2一个闭合一个关断时,绕组得到零电压,用“0”来表示;当S1、S2同时关断时,绕组得到负电压-U,用“-1”来表示。从电机运行的有效性上看,四相SRM可构造出八个空间对称的电压矢量和磁链扇区,下面分析电压空间矢量的作用对磁链和转矩的影响。
根据电路的基本定则,回路中各相绕组的电压方程可以表示为:
(1)
式中:U为A相定子相电压;R为相电阻;i为相电流;ψ(θ,i)为相磁链;θ为转子位置角。
在较短时间内可忽略定子相电阻,故式(1)又可以近似写成:
Δψ(θ,i)=UΔt
(2)
从式(2)可以看出,磁链的变化受控于电压的作用,可以通过选择一组最优的电压空间矢量来满足磁链的变化过程。接下来从转矩控制入手,推导转矩公式。
由式(1)又可知,电源输入功率在不考虑定子绕组时可以表示成:
(3)
式中:i为相电流;θ为转子位置角。θ均为关于时间t的函数,在较短时间内,磁能We=Pedt又可以表示为:
(4)
从式(4)可得电磁转矩为:
(5)
又知SRM的电流在一个周期内基本不变,且工作状态常为磁饱和,因此磁场储能也不会随位置角变化。这样电磁转矩又可写成:
(6)
从式(6)可以看出,转矩的变化受控于电流和磁链对位置角的导数,而电流在半桥式变换器的回路中始终为正,故转矩仅取决于磁链的变化。而从式(2)可知,磁链的变化是通过电压空间矢量的作用来实现的,这样转矩的变化亦可通过选择合适的电压空间矢量来得到满足[6-8]。
表1为转矩、磁链在不同变化组合下的四相SRM直接转矩控制开关表。
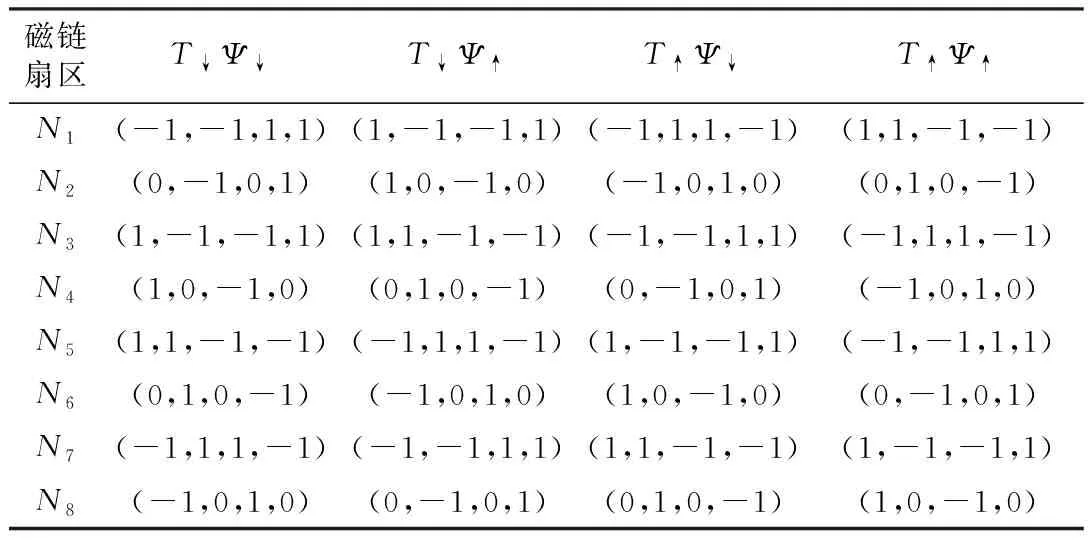
表1 四相SRM直接转矩控制开关表
2 系统硬件设计
以TMS320F2812型DSP为主控制器,搭建了四相8/6极SRM直接转矩控制硬件试验平台,分别由功率变换电路、驱动电路、电压电流检测电路和位置检测电路等组成,如图2所示。
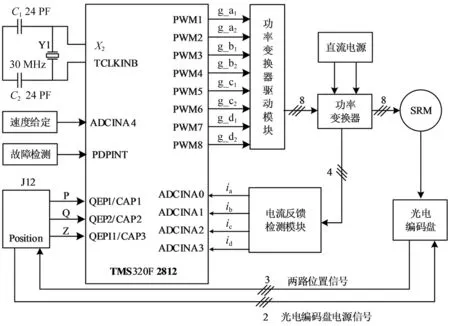
图2 系统硬件结构框图
图3为一相绕组功率驱动电路,功率变换器以MOSFET为主开关器件,通过芯片IR2110驱动,输入端由光电耦合器6N136进行隔离,其中Vcc和Vdd均取+15 V,VCC通过二极管D4、电容C1、负载以及开关管S2给自举电容C1充电。当输入为高电平时,功率管S1、S2得到驱动信号闭合;当输入为低电平时,功率管S1、S2断开。
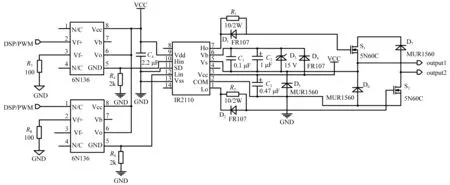
图3 功率管驱动电路
3 系统软件设计
前面分析已经知道,SRM直接转矩控制的核心是对转矩和磁链在不同扇区变化过程的控制,而扇区区间是通过位置角判断的,转矩、磁链是通过电压、电流计算得到的。这样在不同扇区内根据磁链和转矩的变化过程,在建立的开关表中选择相应的电压空间矢量便可实现对转矩和磁链的控制。图4为SRM直接转矩控制子流程图。
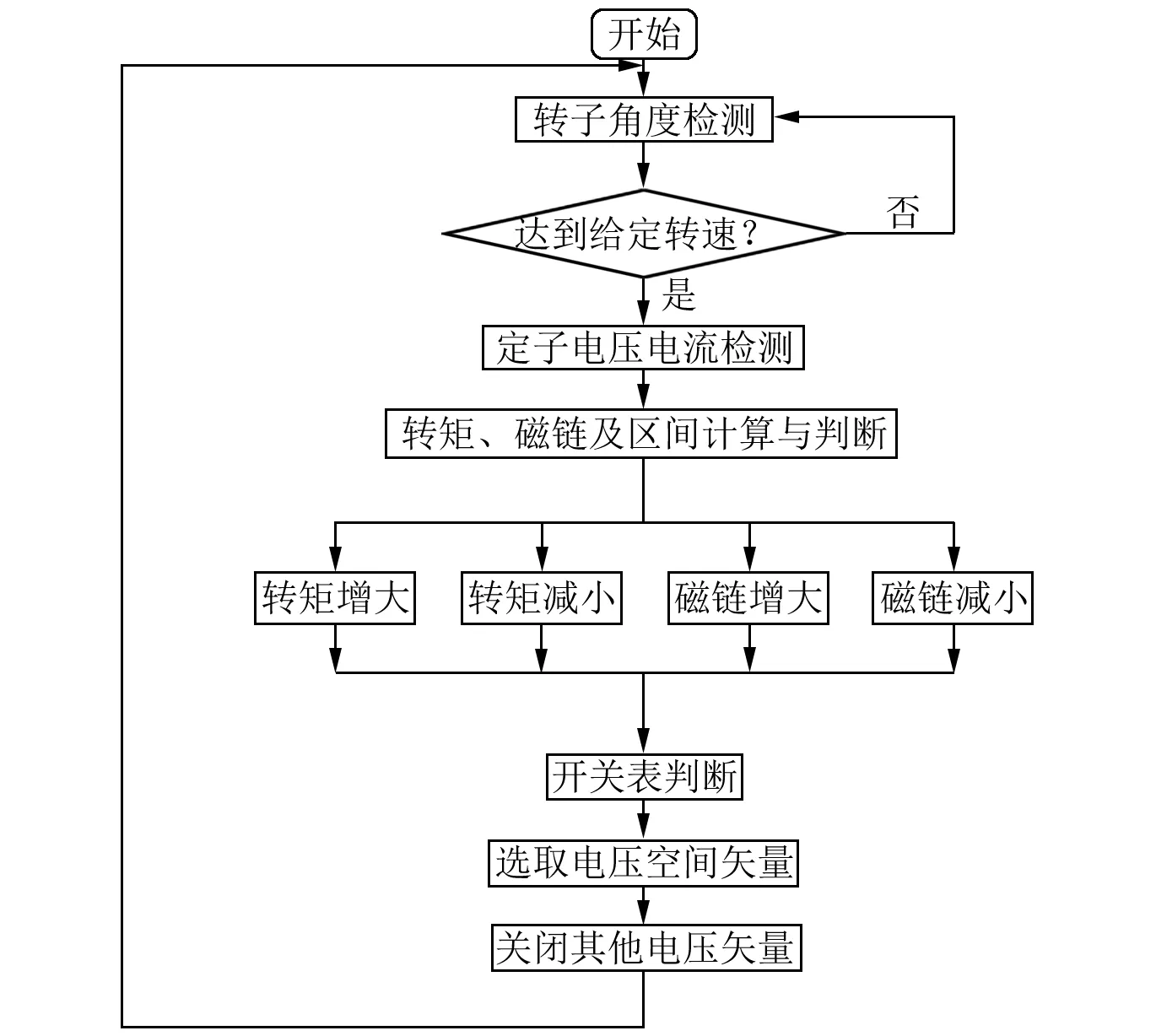
图4 系统软件流程图
4 仿真模型建立
在MATLAB/Simulink环境下搭建了四相SRM直接转矩控制仿真模型,如图5所示。其中,电源电压为直流220 V、转速给定为1 000 r/min、磁链给定为0.45 Wb,仿真步长设定为10-6s。
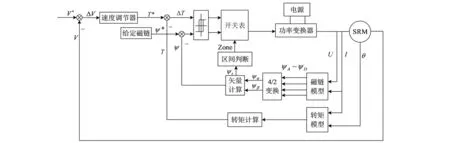
图5 四相SRM直接转矩控制仿真模型
5 仿真与试验结果分析
5.1 仿真结果与分析
通过仿真得到四相定子磁链在静止坐标系α-β下的合成磁链轨迹,如图6所示。从图6可以看出,合成磁链为圆形,这对转矩脉动起到了良好的抑制作用,提升了系统运行的平稳性。
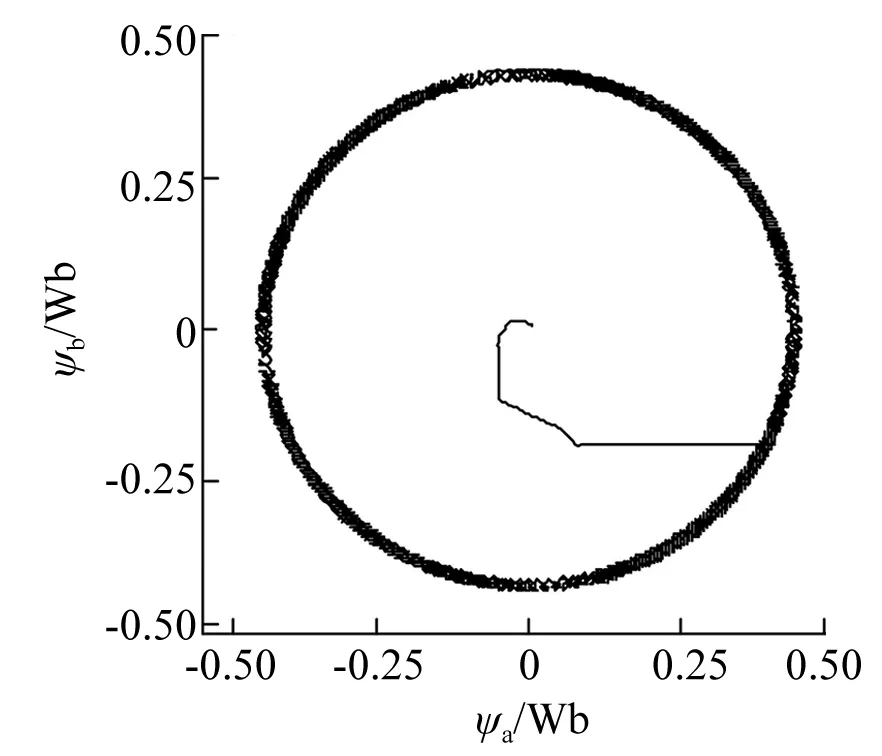
图6 定子磁链轨迹
图7为转速、转矩随负载变化曲线图。运行初始阶段,负载转矩为0 N·m,0.05 s时变为20 N·m,0.1 s时恢复至0 N·m。
从图7可以看到,转速在负载变化的整个过程中保持平稳,最大转速变化约为3r。转矩能快速响应负载的变化,转矩脉动最大不超过1.5%,启动转矩为100 N·m,启动转矩大,调节时间短。

图7 负载突变时的转矩、转速变化曲线
5.2 试验结果与分析
在硬件试验平台下,通过软件实现了四相SRM直接转矩控制。选择的SRM为四相8/6极,功率100 W,额定电压为220 V。
图8中示波器通道1测得的是定子绕组电压信号,通道2测得的是功率管驱动电压信号。
从图8可以看出:当功率管开通时,定子绕组得到正电压,当功率管关断时,定子绕组得到负电压;通过二极管将电流回馈给了电源,当功率管开通一个关断时,定子绕组得到零电压。绕组两端的电压与前面分析的三种电平状态一致,满足直接转矩的控制要求。
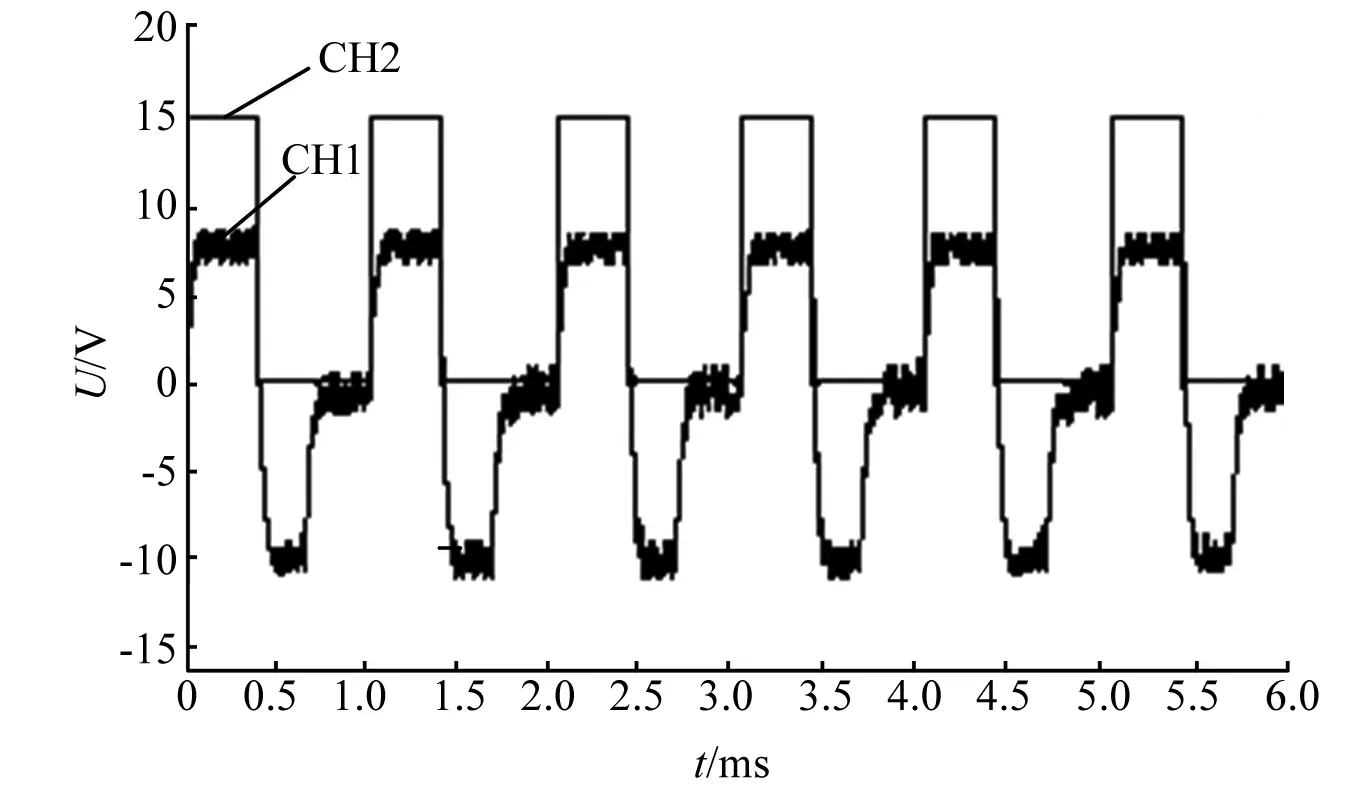
图8 功率管驱动信号与绕组电压信号对比
6 结束语
直接转矩控制方法通过电压空间矢量直接对磁链和转矩实施控制,避免了电机严重的非线性和复杂的数学模型,解决了转矩脉动问题。以DSP为主控制器,通过各模块硬件电路,利用直接转矩算法,实现了四相SRM直接转矩控制,该方法控制简单,易于实现,对更高相SRM的控制过程具有一定的指导意义。