基于LabVIEW的三维扫描激光气体遥测监测系统设计
2022-11-02李云飞
程 跃,周 振,刘 东,姜 静,徐 俊,李云飞
(1.安徽建筑大学电子与信息工程学院,安徽合肥 230601;2.安徽泽众安全科技有限公司,安徽合肥 230601; 3.清华大学合肥公共安全研究院,安徽合肥 230601;4.安徽建筑大学机械与电气工程学院,安徽合肥 230601)
0 引言
甲烷(CH4)是洁净能源天然气的主要成分,与空气混合后遇火能引起爆炸,其爆炸极限为4.9%~16%。传统的气体检测方法采用主动吸气式或被动扩散式进行工作[1-3],需要到泄漏气体危险区域近距离直接接触检测,使检测人员置于危险环境中。因此,将红外吸收光谱气体检测技术与激光遥测技术相结合,研制和开发出新型的非接触、远距离三维扫描激光气体遥测监测系统,并使其满足安全性、可靠性和实时性的安全生产需求十分必要,符合行业发展要求。大连艾科科技开发有限公司开发了LROA01型三维扫描激光气体遥测监测系统,实现最远遥测距离100 m,上海禾赛科技有限公司的HS-6000三维激光扫描甲烷检测系统最远遥测距离为90 m。目前,市场上用于天然气突发泄漏的三维扫描激光气体遥测系统遥测距离均较短(<100 m),探测精度低(±10%),且系统软件功能简单,集成度低,通用性差[4],难以满足实际应用需求。
LabVIEW软件是一种独立的图形化设计和开发软件,具有开发周期短,通用性强和扩展性好等优点,被广泛应用于各种监测系统设计和开发[5-8]。本文基于LabVIEW设计和开发了一套功能齐全、集成度高和通用性强的三维扫描激光气体遥测监测系统,实现了天然气突发泄漏的实时在线、非接触、高精度(小于±5%)和远距离(150 m)三维扫描监测预警。
1 系统组成
三维扫描激光气体遥测监测系统主要由三维扫描激光气体遥测仪、计算机和基于LabVIEW设计开发的虚拟仪器软件系统组成,其系统组成框图如图1所示。
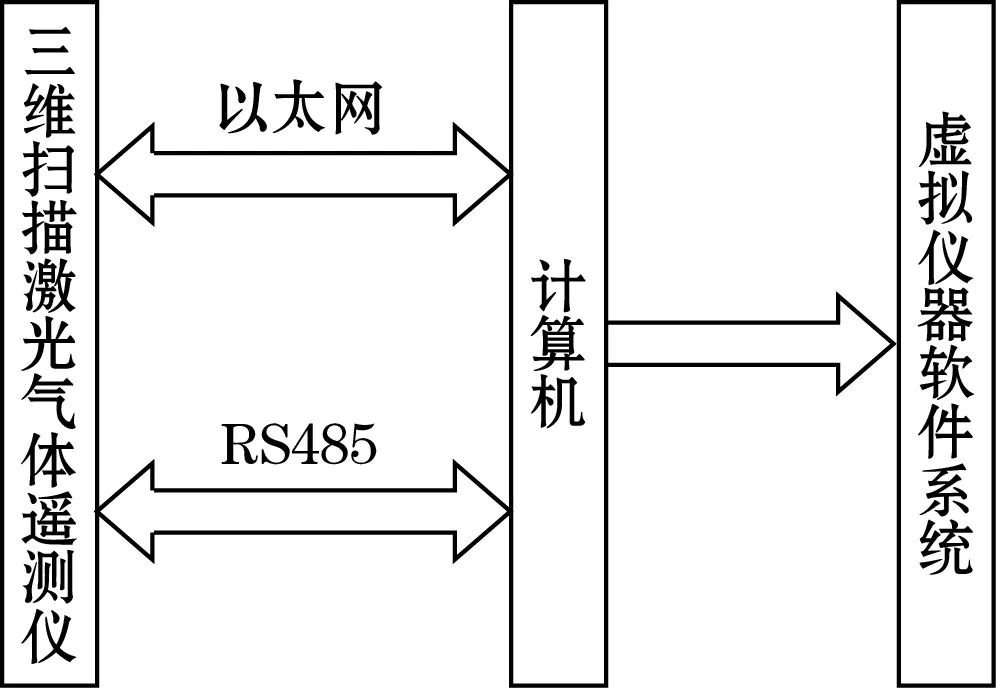
图1 系统组成框图
虚拟仪器软件系统通过计算机实现与三维扫描激光气体遥测仪的通讯和控制,有线以太网实现遥测仪三维扫描双舱防爆云台的方位、自动巡航和视频等通讯和控制,RS485用于激光气体遥测的通讯和参数控制等。三维扫描激光气体遥测仪如图2所示,该遥测仪主要包括三维扫描双舱防爆云台、高清红外夜视摄像和激光甲烷气体遥测,其探测目标为甲烷气体,最远遥测距离可达150 m,三维扫描范围为水平0~360°,垂直0~180°,遥测仪外形尺寸为468 mm×330 mm×418 mm,整体质量小于35 kg,可立柱、壁装等固定安装,也可搭载于巡检机器人或巡检车等。

图2 三维扫描激光气体遥测仪
2 三维扫描激光气体遥测仪工作原理
三维扫描激光气体遥测仪基于非合作目标采用红外吸收光谱气体检测技术与激光遥测技术相结合实现气体突发泄漏探测[9-11],图3为基于非合作目标激光气体遥测框图及其工作示意图,系统主要包括光学部分和嵌入式采集控制分析模块。光学部分为收发一体光学遥测组件,该光学遥测组件由DFB激光器(发射波长为1 653.7 nm),准直器,信号光接收透镜,光电探测器和红色指示激光器等构成,嵌入式采集控制分析模块采用FPGA+ARM嵌入式架构。该激光气体遥测仪的工作过程为:DFB激光器发出的光耦合进入准直器,经过准直器后向外发出近似平行光的近红外探测激光,该探测激光在空间光路传输,经过气体泄漏气团,再经过非合作目标如墙体、地面、管道等反射物通过漫反射后形成回波信号光,该回波信号光再次经过泄漏气团,被遥测仪信号光接收透镜收集并聚焦到光电探测器上进行探测。红色指示激光器发出红色激光,与近红外探测激光平行,用于指示近红外探测激光光束的发射方向。嵌入式采集控制分析模块利用FPGA对DFB激光器输出进行锯齿波扫描和正弦波调制,并通过PID算法对DFB激光器进行高精度温控,控温精度为±0.01 ℃,同时对光电探测器信号进行采集、放大和滤波等处理,根据嵌入式锁相放大解调算法实现一次谐波归一化二次谐波信号(S2f/S1f)解调,并反演出泄漏气体浓度,利用ARM对获得的气体浓度数据通过RS485实时上传。

图3 激光气体遥测框图及其工作示意图
根据朗伯-比尔(Lambert-Beer)吸收定律和激光波长调制光谱技术可知[10],一次谐波归一化二次谐波信号S2f/S1f为:
(1)

由式(1)可知,S2f/S1f只与CH4泄漏气体的积分浓度xCH4L成线性关系,因此,基于非合作目标的激光气体遥测采用S2f/S1f信号来解调气体浓度可消除激光光强、光电探测器的响应和不同非合作目标反射等的变化对测量结果的影响。
3 系统监测软件设计
3.1 软件系统总体框架
如图4所示,是软件系统总体框架图,软件主要包括3个模块,分别为视频模块、云台控制模块和激光气体遥测模块。视频模块和云台控制模块通过以太网与三维扫描激光气体遥测仪主机通讯,激光气体遥测模块通过RS485与三维扫描激光气体遥测仪主机通讯。

图4 软件系统总体框架
视频模块包括视频图像获取和显示、视频参数(亮度、对比度、色度和饱和度等参数,以及视频摄像机的调焦、聚焦、光圈、灯光和雨刷等)控制、视频录像控制和视频图像抓拍等。
云台控制模块包括云台方位(左转、右转、上仰和下俯)手动控制、云台速度控制、云台预置点设置和云台自动巡航设置(设置的预置点加入巡航线形成相应的巡航路径)等。
激光气体遥测模块包括气体浓度曲线显示、超限报警设置、超限报警日志和历史数据查询等。气体浓度超限报警数据以报警时间为指针存储到Access数据库中,历史数据查询子程序可对Access数据库的数据以报警时间方式进行数据的查询和相应时间段数据的保存等。
3.2 软件系统程序设计
三维扫描激光气体遥测监测系统软件采用LabVIEW 2015版本进行设计,利用海康威视HCNetSDK.dll的各库函数(如SDK NET_DVR_Init,NET_DVR_Login_V40,NET_DVR_RealPlay_V40,NET_DVR_CaptureJPEGPicture,NET_DVR_StartDVRRecord,NET_DVR_PTZControlWithSpeed,NET_DVR_PTZPreset,NET_DVR_PTZPCruise等)[12]进行软件各功能模块开发。
3.2.1 视频模块和云台控制模块设计
如图5所示,是视频模块和云台控制模块软件界面,视频模块包括实时视频预览和视频控制按钮,实时视频预览显示云台实时视频画面,画面下面按键可进行视频画面的亮度、对比度、饱和度和色度调节。视频控制按钮可进行实时调焦、聚焦及光圈调节,视频图像抓拍和视频录像存储等。

图5 视频模块和云台控制模块软件界面
云台控制模块包括云台登录、云台控制和云台巡航。输入云台主机的IP地址和端口ID后,输入正确的用户名和密码可登录到云台主机。云台控制用于对云台进行手动方位控制,可进行云台左转、右转、上仰和下俯控制,云台运转速度从1到7个档位可选,此外,可对云台的灯光和雨刷进行开、关控制。云台巡航用于云台自动巡航控制,首先通过预置点设置不同的云台停留位置,然后通过“加入巡航”按钮可把对应的预置点加入到相应的巡航路径中,每个预置点均可设置对应的停留时间和巡航速度。点击“开始巡航”按钮,云台会按照各个设置预置点形成的巡航路径进行往复自动巡航扫描。图6为视频模块和云台控制模块程序框图。
图6 视频模块和云台控制模块程序框图
3.2.2 激光气体遥测模块设计
图7为激光气体遥测模块软件界面,用于激光气体遥测的数据通讯和参数控制,采用RS485协议进行数据的通讯,包括RS485端口参数设置,遥测气体浓度数值实时显示和浓度随时间变化显示,气体浓度超限报警,超限报警日志,气体浓度数据库存储及历史数据查询等。历史数据查询可查询数据库中任意一个时间段内的气体浓度数据,此外可进行该段查询数据的导出保存,如图8所示。
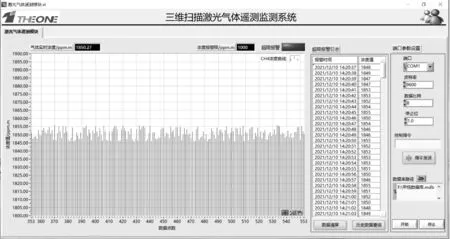
图7 激光气体遥测模块软件界面

图8 历史数据查询软件界面
4 系统测试结果与分析
在甲烷气体泄漏实际环境条件下,对三维扫描激光气体遥测监测系统进行了甲烷气体泄漏模拟实验测试,测试地点在清华大学合肥公共安全研究院地下管网安全实验平台。采用不同的甲烷标准气气袋靠在黄色燃气管道上来模拟甲烷气体泄漏气团,三维扫描激光气体遥测仪发出的红色指示激光用于遥测目标对准,测量时,红色指示激光和近红外探测激光穿过气袋打到黄色燃气管道上,以黄色燃气管道作为背景反射物。图9为1 900 ppm·m的甲烷标准气气袋测试结果,三维扫描激光气体遥测监测系统测量结果的平均值为1 850.76 ppm·m,测量的相对误差为-2.59%。
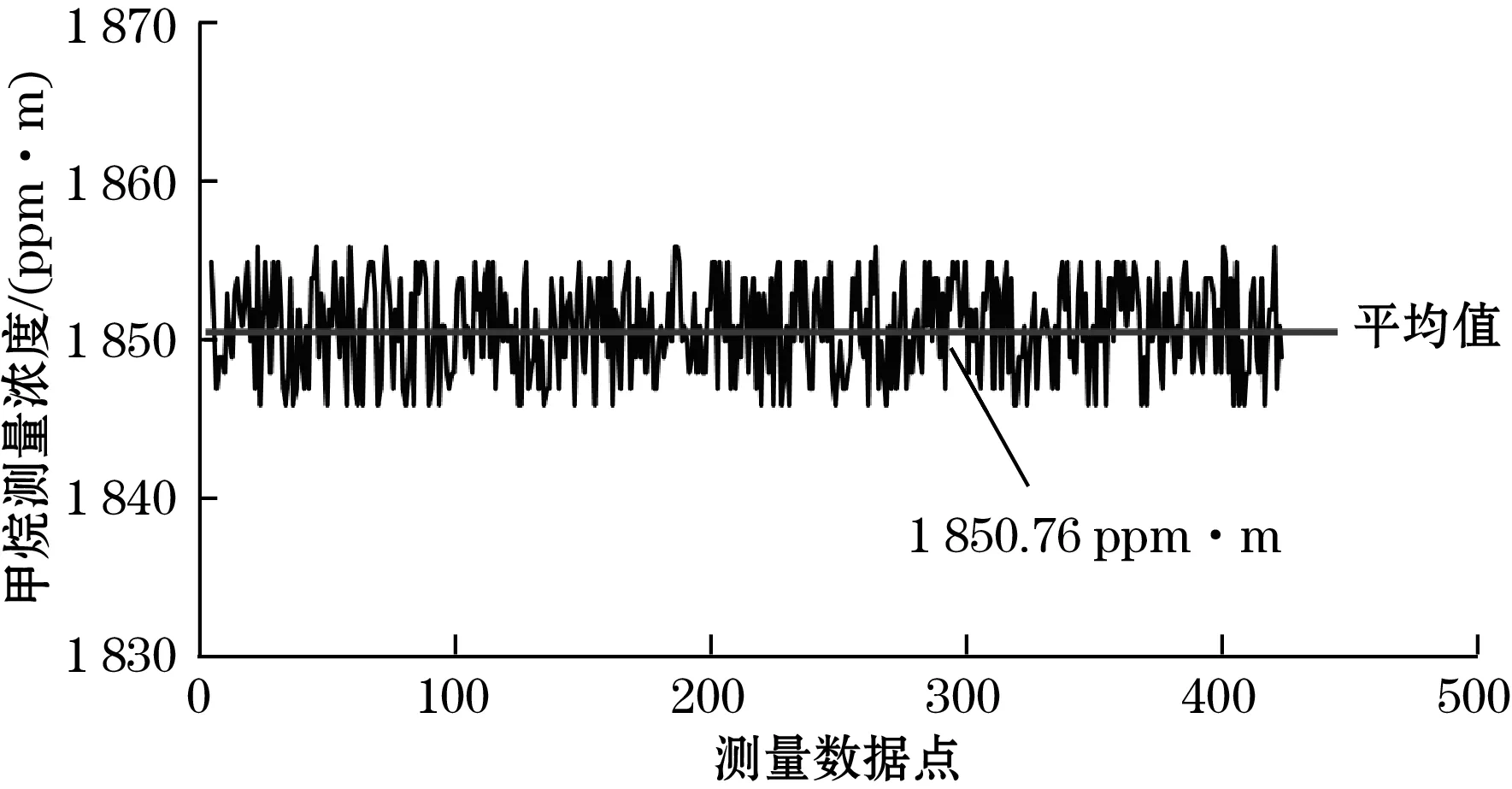
图9 1 900 ppm·m甲烷标准气气袋测试结果
采用不同的甲烷标准气浓度(分别为400 ppm·m,500 ppm·m,800 ppm·m,1 300 ppm·m,1 650 ppm·m和1 900 ppm·m)气袋对系统进行了实际环境条件下的模拟实验测试,测量结果如表1所示,6次测量的相对误差分别为2.45%,-4.68%,-0.15%,-0.80%,-0.69%和-2.59%,相对误差范围在-4.68%~2.45%。如图10(a)所示,对系统测量结果与标准浓度数据进行了最小二乘拟合和相关性分析,线性相关度R2=0.999,线性度较好,系统测量相对误差曲线如图10(b)所示。
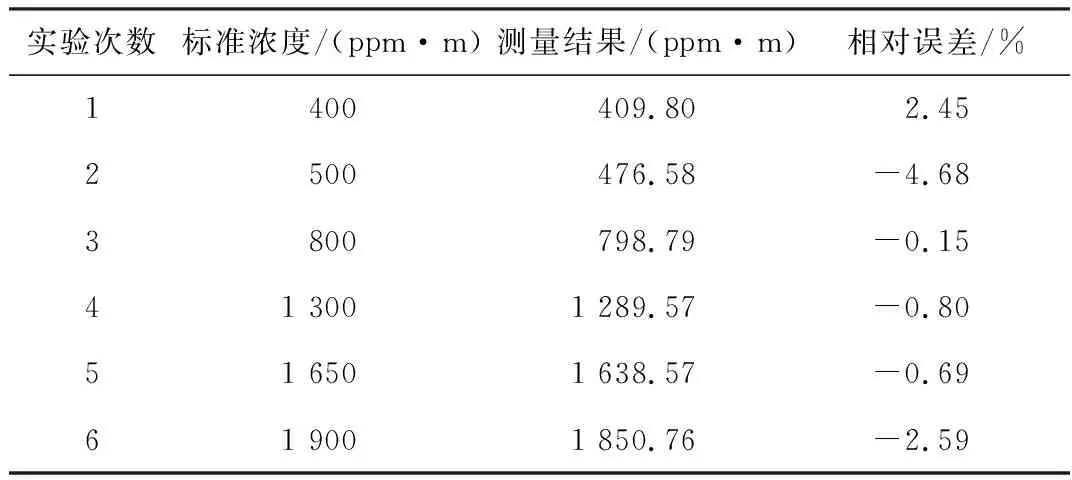
表1 实际环境甲烷气体泄漏模拟实验测试结果

(a)系统测量浓度与标准浓度数据最小二乘拟合和相关性分析

(b)系统测量相对误差曲线图10 模拟实验测试结果分析
通过模拟实验测试,结果表明系统测量相对误差在±5%范围之内,具有误差允许范围内的一致性,验证了整个系统测量的准确性和可靠性,与现有的三维扫描激光甲烷遥测仪±10%的测量误差相比,有显著的提升,提高了系统的检测精度。
5 结论
本文介绍了三维扫描激光气体遥测监测系统的设计与实现,通过LabVIEW平台搭建了监测系统软件,利用平台的图形化编程环境和海康威视HCNetSDK.dll的大量库函数提高了系统开发效率,采用并行编程技术将视频、云台控制和激光气体遥测等功能模块化和集成化,易于用户操作,同时保证了程序的可重用性和可扩展性。通过实际环境模拟甲烷泄漏气团测试,系统实现了对三维扫描激光气体遥测仪的远程控制和视频、气体浓度等数据的实时采集,显示、分析、存储和历史数据查询等,测试结果表明系统测量相对误差在±5 %范围之内,具有误差允许范围内的一致性,完全可应用于实际燃气管道和燃气场站等场所天然气突发泄漏的实时在线、非接触、远距离和高精度三维扫描遥测。
