遥测定位信息网络传输间断问题的解决方法
2022-03-21马方远王西泉郭新楠
马方远,王西泉,郭新楠,李 建
(中国兵器工业试验测试研究院,陕西 华阴 714200)
0 引言
在武器系统飞行试验中,目标遥测轨迹是掌握目标飞行状态和实现安全控制的重要依据,使用遥测定位信息作为引导跟踪源,具有精度高、误差稳定、不受天气影响等特点[1],已被各个靶场作为组网测试的首选方案。但是在现有的遥测系统网络数据传输机制下,遥测定位信息在测试网络内不能等间隔传输,导致中心机接收遥测定位数据时发生时延漂移[2],后帧数据覆盖前帧数据,遥测定位数据元素不完整[3],影响目标轨迹形成与引导效率。
目前,从文献资料中查到,通过中心机处理系统增加容错处理方式成为主流,主要包括增加遥测数据处理结构,改变遥测数据存储策略以及改变遥测数据处理过程三种方法[4]。其在解决目标轨迹形成以及目标轨迹外推方面,均可以达到良好的处理效果。如文献[4]通过改变遥测数的存储结构与数据处理过程,解决遥测数据间断传输时遥测轨迹遥测轨迹形成丢数问题,文献[4—5]主要是解决遥测定位数据作为引导源时,由网络传输带来的时效性与有效性问题,其都未涉及遥测数据间断传输带来的多帧遥测定位数据同时到达,造成被引导的测试设备天线跟踪不流畅问题。
针对上述问题,对整个遥测数据流的处理过程进行了分析,在不改变硬件系统的前提下,通过改进遥测数据处理过程,增加冗余处理、时效性处理以及插值处理步骤解决上述问题,并取得良好的效果。
1 遥测定位数据的实时处理过程
1.1 遥测地面接收站的遥测数据网络发送模式
首先遥测地面站接收解调遥测信号,当遥测数据填满遥测综合解调板上半个内存或整个内存时,开放内存读取功能,允许遥测计算机访问遥测综合解调板上半个内存数据或下半个内存数据,遥测计算机将读取到的遥测原码数据通过UDP协议,以单点或是组播方式发送到指控网络,发送频率、发送数据帧数与遥测地面站综合解调板内存大小、码速率以及遥测数据帧格式有关[5]。其关系可用式(1)表示:

(1)
式(1)中,s为遥测解调器的发包内存大小,m为遥测数据的码速率,f为遥测地面站发包频率,n为遥测地面站发送整帧个数,l为遥测数据整帧长(含时码)。
通过设置综合解调板内存大小,可以一定程度改变遥测地面站对外发送频率与内容大小,综合解调板内存大小设置越大,遥测地面站网络传输数据频率越低,一次发送的遥测整帧数据越多,当设置过大时,一次发送数据容量将超出UDP协议发送数据包容量上限,导致数据发送失败;综合解调板内存大小设置越小,遥测地面站网络传输数据频率越高,遥测计算机访问遥测综合解调板内存频繁,遥测解调数据系统任务繁重,严重时将影响正常的遥测数据解调功能。一般情况下,遥测地面站的网络数据传输频率一般为4~10 Hz。
1.2 中心机对遥测定位数据的处理过程
中心机通过网络接收遥测数据原码:将遥测数据原码中的定位数据实时解析出来,一是形成遥测轨迹用于态势显示,二是按照指控协议发送给指控中心,用于引导测试。
遥测定位数据主要有两个来源:一是来自卫星导航信息,其数据刷新率多为10~20 Hz;二是来自导航计算机字,其数据刷新率多为200~250 Hz。遥测定位数据数据率与遥测地面站网络数据发送率不匹配,例如,所选取的遥测定位数据数据率为200 Hz,遥测地面站以10 Hz的频率发送遥测数据原码时,导致20个遥测定位数据同时到达中心机,按照中心机的数据处理策略,后一帧数据将覆盖前一帧数据,造成遥测轨迹信息丢失。针对此问题,从中心机接收的原始数据中截取代表性的一段数据如表1所示。
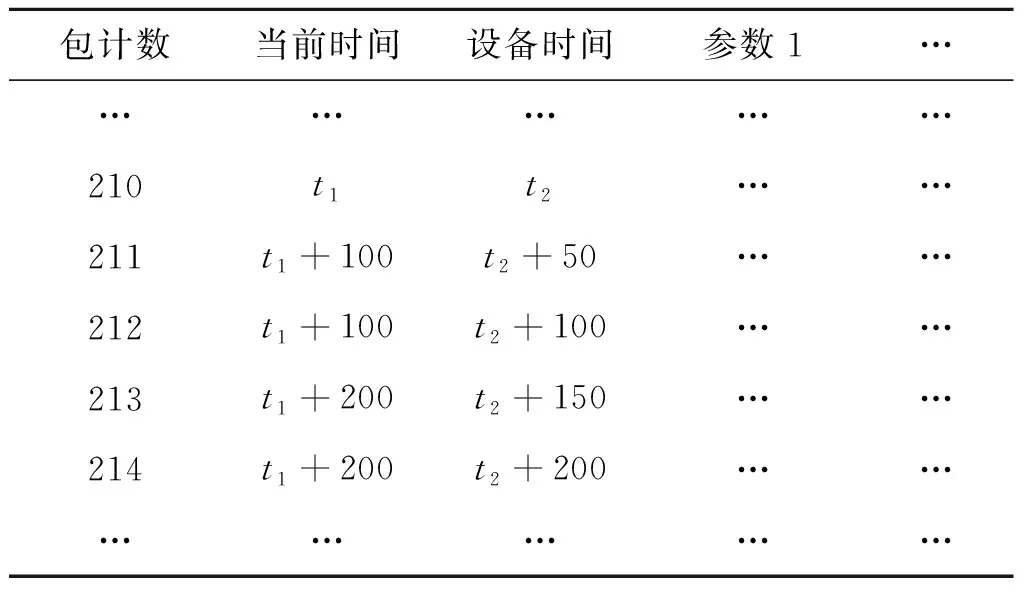
表1 原始数据包结构示意表Tab.1 The original packet structure diagram
表1中所截取的数据包为卫星导航数据包,数据率为20 Hz,遥测地面站的发送频率为10 Hz,包计数是指卫星导航包计数,当前时间是指中心机从网络接收到当前包的间断时间,设备时间是指卫星导航包内的附加时间信息。表中的t1表示数据包210到达中心计算机时,中心计算机对其打的时间标识,t2表示数据包210产生的时刻,对于数据包211与212,其同时到达中心机,按照中心机的数据存储策略,212包的数据将会覆盖211包的数据,造成遥测轨迹数据缺失。
1.3 指控中心的引导测试流程
指控中心接收网络内的目标位置信息,打上时标,按照引导协议将数据分发给指控网络内的所有测试设备,测试设备接收目标时空位置信息,根据时差,外推目标位置信息,指引天线指向测试目标。
当多包遥测定位数据同时到达测试设备时,测试设备对网络延时进行判断,外推当前目标位置,控制天线指向目标,截取代表性的一段数据如表2所示。测试设备在同一时刻会指向不同方向,另外,测试设备的引导数据刷新率一般要求为40 Hz,引导数据刷新率过低,天线系统运行流畅性将降低。

表2 测试设备接收引导数据结构与天线指向示意表Tab.2 The test equipment receives guidance data and antenna pointing diagram
表2中包计数是指测试设备接收的引导数据包计数,当前时间为数据包到达时间,发送时间为指控中心分发数据包时间,目标位置为遥测数据包中的位置信息。t1为引导数据包300的到达时间,t2为引导数据包300从中心计算机发出的时间,X表示引导数据包内的目标位置信息,A、E表示被引导设备根据引导数据包内的目标位置信息计算得到的方位指向信息与俯仰指向信息,对于同时到达的引导数据301包与302包,X1与X2的位置是不一样的,设备天线同时指向两个空间位置,有悖常理。
2 解决方案
中心机处理遥测数据时,在一个数据周期内,处理得到的所有遥测定位信息,并打上当前时间,使用当前时间进行遥测轨迹描述,造成后帧覆盖前帧现象,因此,可以使用设备时间作为信息源进行遥测轨迹描述。但是,当以设备时间作为数据标识时,中心机同时处理得到的遥测定位数据几乎会同时发送至指控网络,到达测试设备端,造成测试设备跟踪天线不平稳的现象,因此,还需要对发往指控中心的遥测定位信息进行下面处理。

图1 遥测定位数据处理过程Fig.1 Data processing of telemetry location
1) 冗余性处理,就是利用遥测定位数据包同时到达,后帧覆盖前帧的设计思路,保持网络发送的遥测定位信息为最新信息,当遥测定位信息数据率小于遥测数据网络发送频率时,可跳过,即遥测地面站每次网络传输的遥测数据包最多只有一帧遥测地面数据包。
2) 时效性处理,就是根据当前时间与设备时间的时间差,利用遥测定位数据包内的位置、速度、加速度信息,外推当前时刻目标位置信息[6]。可按式(2)进行。
x(t1)=x(t2)+v(t2)(t1-t2)+ 0.5×a(t2)(t1-t2)2
(2)
式(2)中,t1为当前时刻;t2为最新设备时间;x(t2)、v(t2)、a(t2)为t2时刻遥测定位数据包的位置、速度、加速度信息,则x(t1)为外推的当前目标位置信息。
3)插值处理[7],经过冗余性处理后,引导数据的刷新率与遥测地面站的数据发包率相同,最高为10 Hz,远低于测试设备对引导数据刷新率40 Hz的要求,因此需要对其进行插值。插值方法有两种:一种是按照测试设备所需的引导数据刷新率,重复发送t1时刻的目标位置x(t1),引导协议内的数据发送时间填为t1时刻,利用设备内部的外推算法,外推目标空间位置;二是利用式(2),外推各插值时刻的空间位置,引导协议内的数据发送时间填为当前发送时刻,发送的目标位置可用式(3)表示。
(3)
式(3)中,Δt为测试设备要求的引导数据周期;f1为测试设备要求的引导数据刷新率;f2为原始引导数据的刷新率(遥测地面站的数据发包率),则第k个引导数据插值发送时刻为t1+kΔt,目标空间位置为x(t1+kΔt)。
3 试验验证
以某型号武器200 km飞行试验数据为例,遥测定位信息采用的为导航计算机的输出信息,数据周期为5 ms,遥测地面站接收遥测数据,以100 ms一包的时间间隔,将遥测数据原码发送给中心机,截取中心机处理过程中的代表性一段数据如图2所示。当前时间是指中心机接收到此包数据时间,为当天时间的累计时间,单位ms,设备时间为导航计算为数据包的附加时间信息,这里指发射零点后的累计时间,单位s。使用设备时间进行遥测轨迹描述,不会丢失数据信息。

图2 中心机处理得到的数据截图Fig.2 A screenshot of data processed by the central computer
如图3所示,当中心机将收到的遥测定位信息,不经过冗余处理、外推处理与插值处理时,直接发送给网络内的雷达设备,发送频率为10 Hz,一次发送20组位置信息,雷达设备根据遥测定位信息进行跟踪,其天线行程出现台阶状,运行不流畅。

图3 雷达天线方位角行程分析(直接引导)Fig.3 Analysis of azimuth stroke of radar(direct guidance)
如图4所示,当中心机将收到的遥测定位信息,经过冗余处理、外推处理与抽值处理后,发送给网络内的雷达设备,发送频率为40 Hz,一次发送1组位置信息,雷达设备根据遥测定位信息进行跟踪,其天线行程平稳光滑。
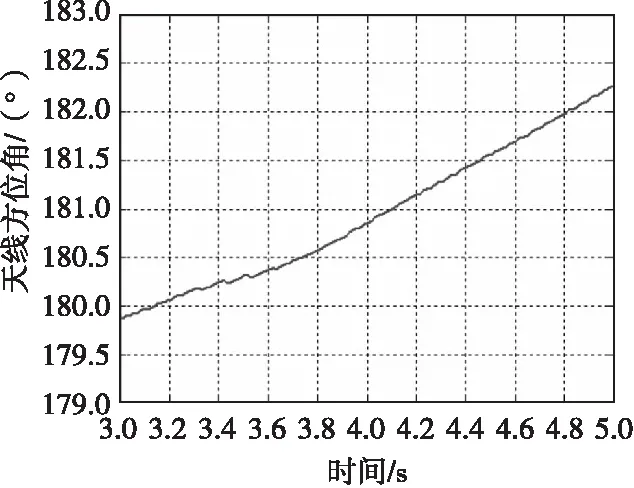
图4 雷达天线方位角行程分析(按本文方法处理后引导)Fig.4 Analysis of azimuth stroke of radar antenna
在某型号装备招标比测试验中,有5家单位参与竞标,总计组织飞行试验35次,其中2家单位遥测定位数据率为200 Hz,1家单位遥测定位数据率为25 Hz,1家单位遥测定位数据为10 Hz,1家单位遥测定位数据为5 Hz。试验时,遥测地面站以4 Hz的数据率发送遥测数据原码,使用本文方法,完成了试验过程中遥测数据的态势显示任务,以定频40 Hz平稳引导雷达、光电经纬仪的跟踪任务,测试成功率100%。如图5所示,雷达在遥测定位数据的引导下,可以稳定跟踪目标,所选雷达对该类目标的最大跟踪距离为128 km。
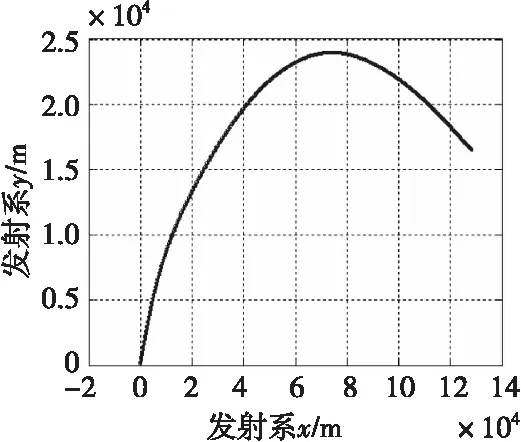
图5 雷达实际测试数据Fig.5 Actual radar data
4 结论
本文提出的遥测定位数据网络传输间断问题的解决方法,在不改变现有遥测系统数据传输机制的情况下,通过改变中心机软件对遥测数据处理过程,增加冗余处理、外推处理与插值处理,形成连续平稳的遥测轨迹。通过仿真与试验证明,该方法既能很好地解决遥测轨迹形成时的丢数问题,又能很好地适应靶场指控引导网络,引导靶场测试设备平稳跟踪目标。
