基于频率分集阵列的多功能一体化波形设计与信号处理方法
2022-11-01廖桂生许京伟朱圣棋张玉洪
兰 岚 廖桂生* 许京伟 朱圣棋 曾 操 张玉洪
①(西安电子科技大学雷达信号处理国家级重点实验室 西安 710071)
②(西安电子科技大学电子工程学院 西安 710071)
1 引言
随着雷达体制的进步,相控阵突破了传统机械扫描雷达扫描慢、精度低的缺点,其利用多通道同时形成多个独立控制波束,获取目标角度、距离、速度等信息,并通过快速电扫描的方式提升了雷达对目标信号检测与信息获取效率,具有高精度、高分辨力、强对抗性能、多目标多功能处理能力、高可靠性和实时性等优势,在预警监视、探测识别、搜索跟踪等核心领域发挥了重要作用。然而,相控阵的天线方向图仅是角度的函数,无法区分相同角度的目标与干扰,制约了对目标和环境信息获取。
近年来,在相控阵基础上又提出了频率分集阵1值得注意的是,为了与相控阵形成对比,也有文献称FDA为频控阵[3,5],而本文统一使用“频率分集阵”。(Frequency Diverse Array,FDA)新体制雷达[1]。在FDA中,发射天线载频间存在步进量 Δf(通常远小于发射载频),因此发射方向图成为角度、距离、时间的多维函数[2],进一步扩展了信号分辨维度2广义上,发射阵元之间除了改变载频,引入波形、时延、相位调制也可得到依赖于距离和时间的方向图,即波形分集阵列[8]。,并提升了雷达系统的波束控制能力[3-8]。然而,FDA发射导向矢量中的距离与角度互相耦合,且具有时变性。对此,可结合多输入多输出(Multiple-Input Multiple-Output,MIMO)技术来分离发射波形,从而获取距离维自由度[9]。值得注意的是,传统方法由回波的时延来获取距离信息,而FDAMIMO雷达中的发射导向矢量中包含了目标距离信息,尽管不同的目标信号在时域上重叠在一起,仍然能够在发射空间域区分不同目标,可有效解决目标的距离模糊问题[8]。近年来,学者将FDA-MIMO雷达应用于距离角度联合参数估计、目标检测、距离模糊杂波抑制、主瓣欺骗式干扰抑制、无模糊高分宽幅成像、雷达通信一体化等方面,图1以时间轴的方式给出了FDA相关研究现状。具体各领域研究现状总结如下:
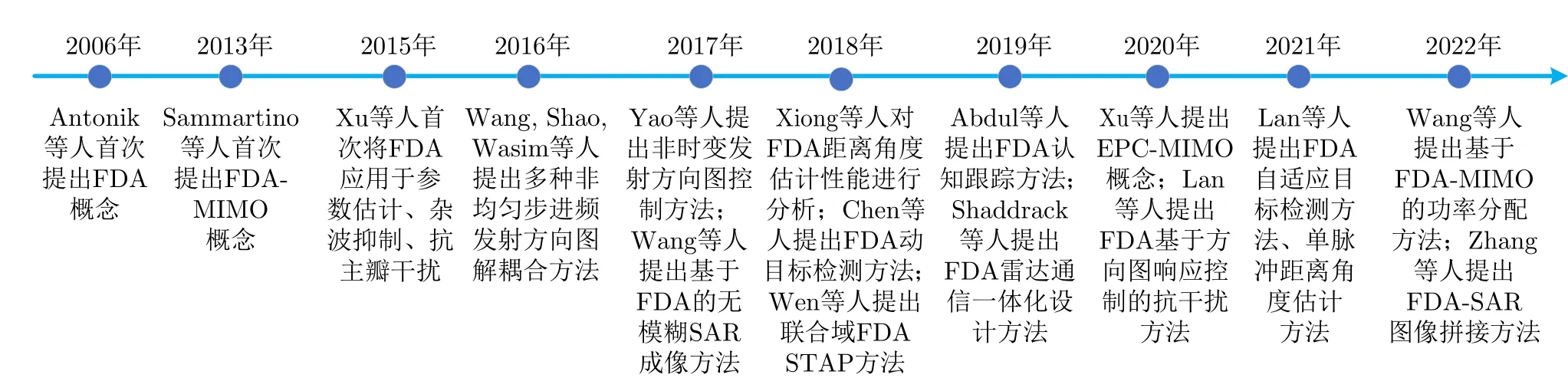
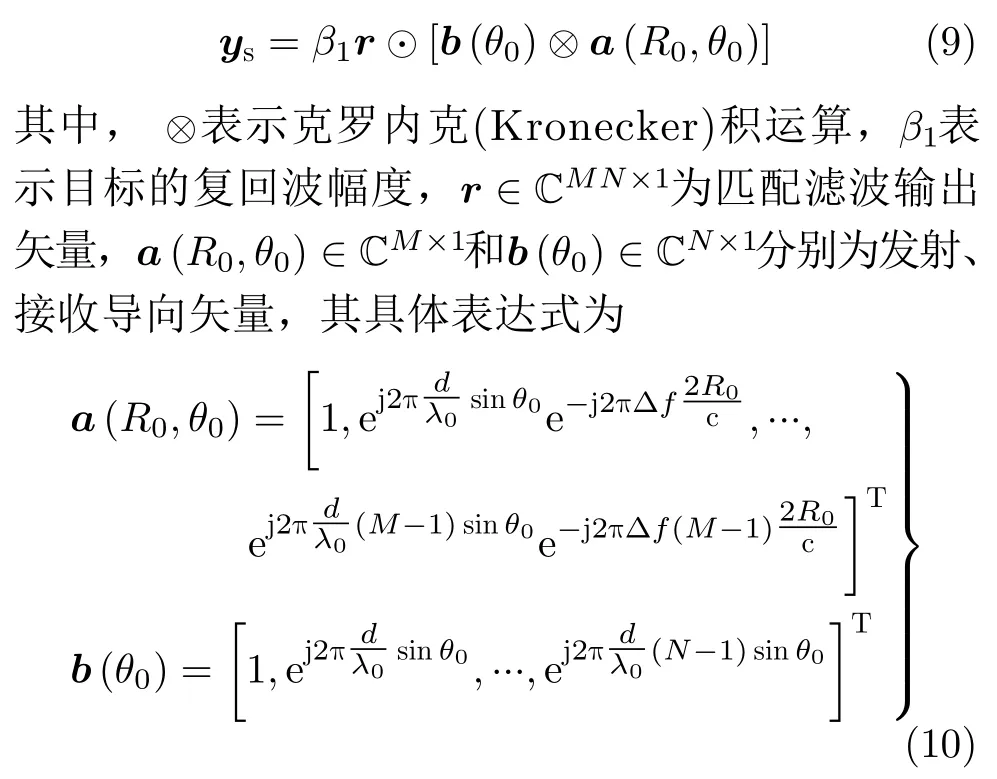
图1 FDA发展动态时间线Fig.1 The dynamic timeline of FDA development
(1) 距离角度联合参数估计。相比于传统相控阵或MIMO雷达,FDA-MIMO雷达的等效发射导向矢量是距离与角度的函数,因此采用适当的方法可实现距离-角度二维波束形成,采用空域处理方法能够同时获取距离和角度信息,鉴于此,国内外学者探索了多种目标角度-距离联合估计算法。学者大多基于最大似然(Maximum Likelihood,ML)准则[9,10]、多信号分类(MUltiple SIgnal Classification,MUSIC)及其改进算法[11,12]、旋转不变技术(Estimation of Signal Parameters via Rotational Invariance Techniques,ESPRIT)及其改进算法[13,14]对目标角度、距离、多普勒(Doppler)、极化信息等进行联合估计[15],并进一步分析了参数估计的克拉默-拉奥界(Cramér-Rao Bound,CRB)、均方误差、分辨力等性能指标[16]。除了研究传统均匀线阵(Uniform Linear Array,ULA)参数估计方法,学者也针对面阵[17]、共形阵[18]、互质阵[19]研究参数估计方法。另外,文献[20]提出了一种基于无网格压缩感知的FDA-MIMO雷达角度-距离联合估计算法,并研究了距离-角度估计的二维原子范数最小化问题;文献[21]通过优化加权范数的目标函数,采用稀疏迭代优化的方法获取目标的距离、角度和幅度信息。
(2) 目标检测。FDA-MIMO雷达具有更高的信号处理维度,能够获取更全面的杂波和目标信息,从而能提升目标在杂波等非均匀环境下的检测性能。实际上,文献[22]初步研究了高斯白噪声背景下已知目标距离和干扰协方差矩阵的先验信息的目标检测性能。文献[23]在无需干扰协方差矩阵先验信息下,通过对干扰进行外锥域建模,实现对真实目标的检测与假目标抑制,并基于不同频率步进量提出了一种双脉冲检测方法[24]。文献[25]在高斯色噪声背景下,针对广义似然比检验(Generalized Likelihood Ratio Test,GLRT)准则提出基于优化理论的自适应目标检测器设计方法。此外,文献[26]利用Doppler扩展效应在主瓣杂波环境中进行盲Doppler目标检测,文献[27]在Swerling I与Swerling II模型下通过设计多脉冲检测器对目标进行检测。另外,文献[28]提出空距频聚焦信号处理(Space-Range-Doppler Focus,SRDF)方法,以实现对运动目标的检测与辨识。
(3) 距离模糊杂波抑制。FDA-MIMO雷达具有距离-角度-Doppler三维自由度,可实现空时频联合域信号自适应处理,用于抑制距离模糊的杂波。文献[29]提出了空时距离三维自适应处理方法,基于子空间投影实现了杂波、压制式干扰和欺骗式干扰的同时抑制。文献[30]基于二次距离补偿(Secondary Range Dependence Compensation,SRDC)原理,利用FDA-空时自适应处理(Space-Time Adaptive Processing,STAP)方法实现距离模糊杂波分离与抑制。文献[31]针对面阵FDAMIMO雷达,通过空间频率补偿和预STAP滤波解决STAP雷达中的距离模糊问题。另外,文献[32]基于自适应波束形成技术提出了一种杂波抑制方法,并提出了一种基于辅助通道的距离补偿方法。文献[33]在双基地FDA-MIMO STAP雷达中设计频率增量,进而在三维空间中实现距离模糊杂波分辨。
(4) 主瓣欺骗式干扰抑制。FDA-MIMO雷达利用目标和干扰的距离差异,提供了一条从发射空域辨别真、假目标并主动抑制假目标的有效思路。对此,不少学者研究了FDA-MIMO雷达空域抗干扰方法[34-46],文献[40]对其进行了总结。现有方法主要体现在自适应波束形成器设计类抗干扰[34-38]、空间投影类抗干扰[43,44]、方向图设计类抗干扰[45,46]3种类型。此外,文献[41]针对假目标伪随机分布问题提出了一种鲁棒的非一致样本检测方法,包括奇异样本挑选与目标信号剔除,并利用收发联合的二维自适应波束形成技术,来抑制距离维失配的假目标。文献[45]针对阵列/系统误差问题,提出了基于零点和主瓣展宽的方向图精准控制方法,并对干扰进行方向图置零来抑制。进一步,在FDA-MIMO雷达基础上,文献[46]研究了阵元脉冲编码(Element-Pulse-Coding,EPC)-MIMO雷达稳健空域抗主瓣干扰方法。另外,笔者团队研制了频率分集阵雷达原理样机,并在此基础上开展了雷达主瓣干扰抑制的实验验证[8,40]。
(5) 无模糊高分宽幅成像。FDA-MIMO雷达经过接收处理后可以获得距离维自由度,等效于在发射空域上给不同距离模糊区间加上了等效主瓣指向“空域标签”,用来区分来自不同距离模糊区间的回波,可用于解决高分辨宽测绘带成像中的距离解模糊问题。文献[47,48]最早研究了FDA在合成孔径雷达(Synthetic Aperture Radar,SAR)成像方面的应用。文献[49]在FDA中采用非均匀步进频,通过收发波束形成进行成像。文献[50]利用距离相关补偿(Range Dependence Compensation,RDC)技术来解决距离模糊问题,并实现了高分辨率宽测绘带成像(High Resolution Wide Swath,HRWS)。此外,针对多通道SAR地面动目标检测(Ground Moving Target Indication,GMTI)中图像配准和通道相位误差问题,文献[51]根据通道间干涉相位与Doppler频率间线性关系提出了一种FDA-SAR径向速度估计方法。在FDA基础上,文献[52]通过设计发射通道与慢时间编码,在接收处理后可以提取期望区域的回波,并进一步抑制其他距离模糊区的回波。文献[53]通过EPC阵列发射自由度有效提取各个距离模糊区域的主瓣回波,并利用方位压缩处理进一步降低残留模糊回波的影响,缓解SAR/GMTI系统中的高分辨率和宽测绘带的矛盾。
(6) 雷达通信一体化。通过在FDA发射波形中嵌入通信信息,并选择合适的频率步进量,在接收端采用双通道处理可分别实现通信信息解码和雷达信号处理功能[3]。文献[54]通过将通信信号沿着雷达主瓣指向零度的方向进行投影,并利用巴特勒矩阵的正交性解决通信信号与雷达目标探测的互扰问题。文献[55]通过将通信信息嵌入到FDA-MIMO雷达的频率增量中,提出了一种二次通信功能的信息嵌入方案,并分析了误码率与CRB关系,以检验雷达发射中的通信信息嵌入对FDA-MIMO雷达性能下限的影响。文献[56]在FDA中利用线性递增的频率步进量来进行距离-角度相关的正交空间调制无线通信,即利用不同的频率发射同相分量和正交分量。进一步,文献[57]将FDA用于毫米波无线通信中的绿色安全通信,实现距离角度解耦合,且具有自动自跟踪功能,以满足发射/接收信道状态信息要求。另外,文献[58]将FDA的频率步进量和正交频分复用技术的频偏联系起来,相比于传统的正交频分复用技术,能够增强信息传输的安全性。
另外,FDA在目标跟踪[59-62]、低截获[63,64]等领域也发挥了重要作用,表1总结了FDA-MIMO雷达在各种应用中具有的优势以及所采用的信号处理方法,图2表示了各应用间的关联。然而,现有FDA雷达通常针对某一特性需求进行系数参数设计,需要在不同功能间进行切换与参数调整,各个任务互不兼容。实际上,雷达的任务涵盖预警探测、电磁对抗、成像、识别、态势感知等多种功能,在复杂多变的电磁环境中,功能互不兼容的单一设备或多设备的简单叠加已不再满足要求,因此多功能集成的雷达系统应运而生。目前多功能雷达技术已在国际上获得应用,如AMDR (AN/SPY-6(V))雷达是美国海军以防空反导一体化为核心的多功能双波段有源相控阵舰载雷达,其中一部雷达采用S波段,另外一部雷达则使用X波段,用于执行水平面搜索、精确跟踪和引导导弹等任务。除此之外,美国DARPA开展了“协奏曲”多功能射频系统项目,其在电子战、通信、雷达模式之间自适应和灵活切换,综合性能优于各独立系统。因此,多功能一体化雷达技术已成为雷达应用发展的重要方向,探索相同体制下可兼容多任务的信号处理方法迫在眉睫。
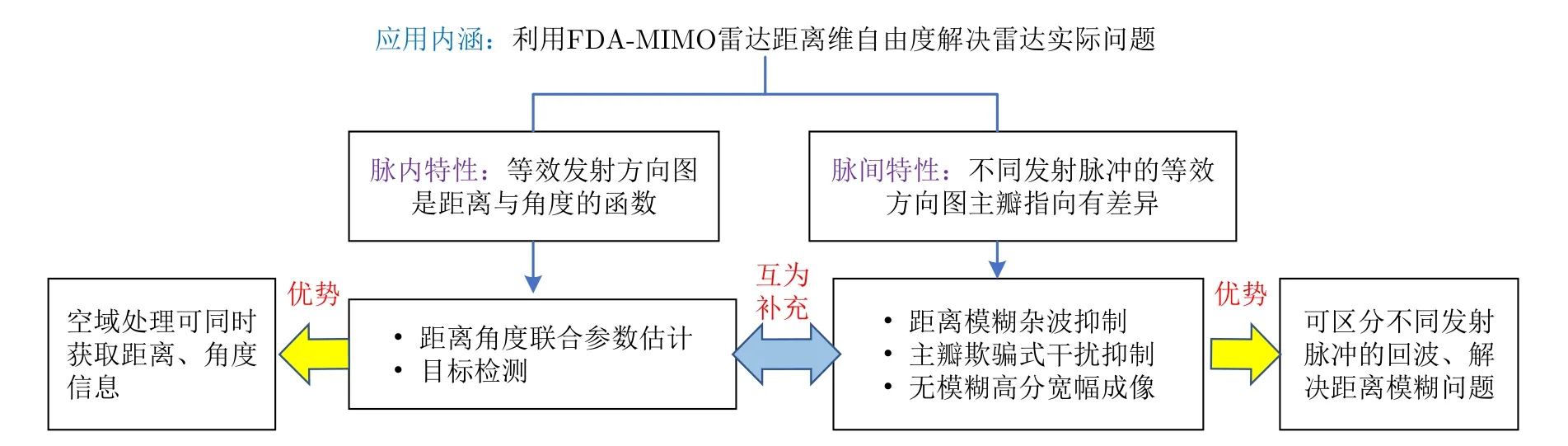
图2 FDA-MIMO雷达不同应用的关联Fig.2 Relationships among different FDA-MIMO radar applications
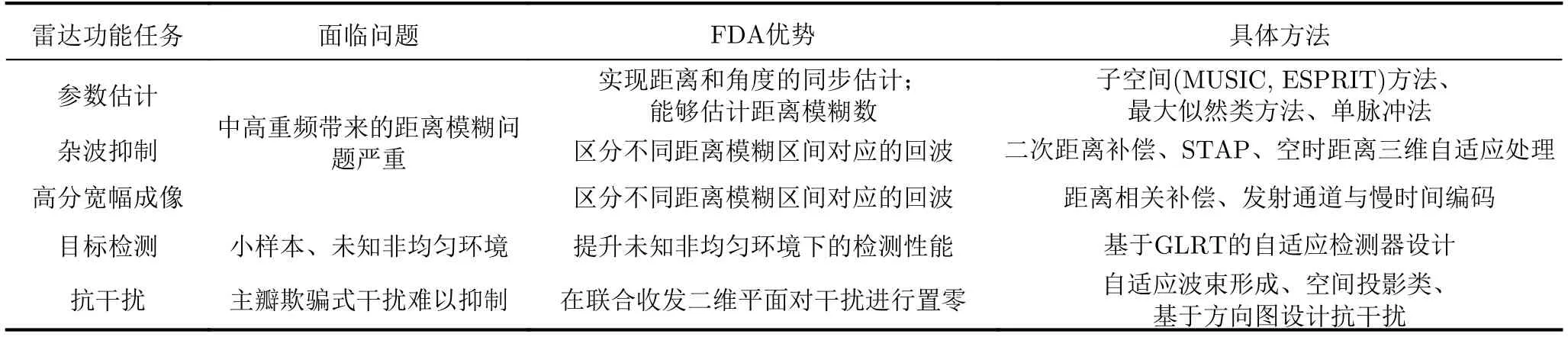
表1 多功能FDA-MIMO优势及信号处理方法Tab.1 Advantages and signal processing methods of multifunctional FDA-MIMO
因此,本文在总结FDA雷达应用的基础上,对FDA雷达多功能一体化波形设计与信号处理方法进行总结,研究FDA波形设计方法,分析FDA在一体化参数估计与自适应检测、一体化解模糊与抗干扰、一体化成像与动目标检测等多任务中的优势,并指出其技术难点,进一步,对未来发展趋势进行展望,为多功能一体化雷达系统的发展与应用提供参考。
2 FDA信号模型与波形设计
2.1 发射波形设计
考虑具有M个阵元的ULA,脉宽内第m个(m=1,2,...,M)阵元发射的信号表示为[4]
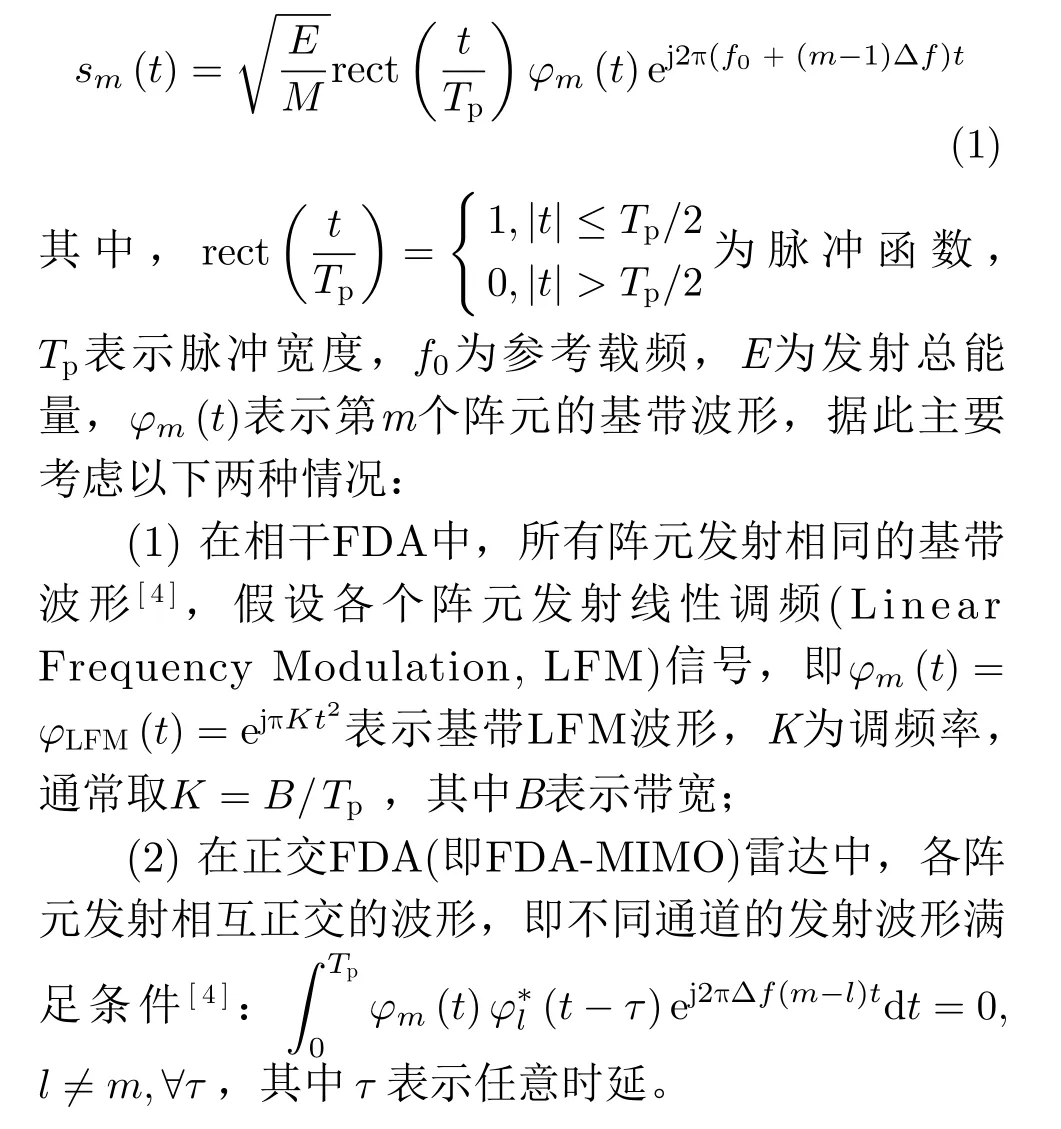
为衡量波形设计性能,定义FDA在角度、距离、Doppler维上的多维模糊函数为[65]

其中,d表示阵元间距(通常为半波长),λ0=c/f0表示波长,c表示光速。可见其模糊函数为距离、角度、Doppler的多维变量。进一步地,当Doppler为0时,图3分别给出了FDA多维模糊函数的角度-角度剖面和距离-角度剖面示意图。如图3(a)所示其目标角度-接收指向对角线上具有高增益,且可形成全空域均匀覆盖。另外,图3(b)中接收能量在θ0附近具有高增益,且距离维具有低旁瓣特性。然而,其距离维主瓣宽度大,分辨率差。实际上,采用频率-时间调制波形对应的积累带宽会降低,从而导致相干FDA雷达的距离维分辨率恶化。对此,文献[66]提出一种“正切调频+空域编码”的相干FDA雷达波形设计方法,其发射信号在空间θ处的信号表达式为
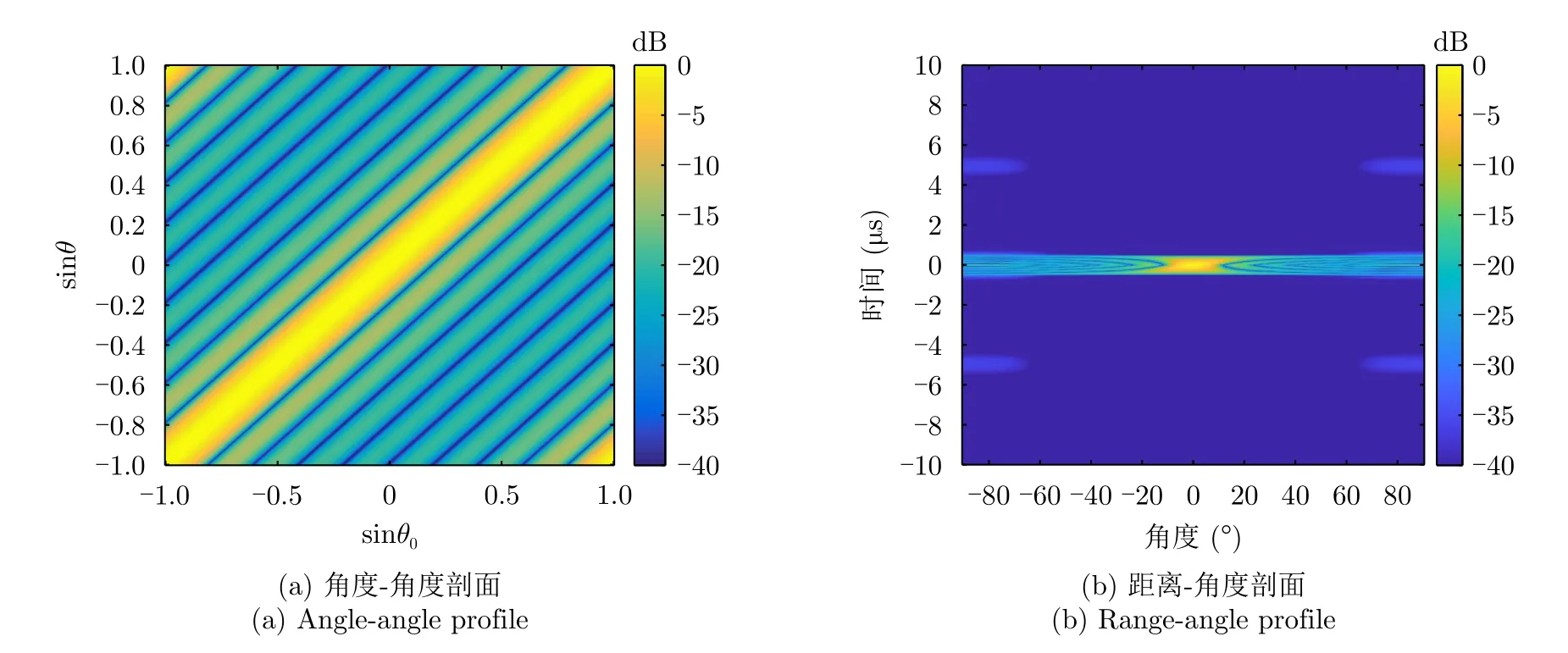
图3 FDA多维模糊函数Fig.3 Multi-dimensional ambiguity function of FDA

实际上,FDA-MIMO距离维自由度的获取依赖于接收端对发射波形的分离,其发射通道间的波形正交性影响了FDA-MIMO在检测与估计、解模糊、抗干扰/杂波、成像等应用的性能[8]。大部分关于FDA-MIMO的文献假设发射波形之间完全正交,然而,实际中无法获取在所有时延、Doppler都正交的波形,其波形正交性能影响FDA-MIMO的功能。对此,可以借助传统MIMO正交波形设计方法,在满足恒模约束[67]、峰均比(Peak Average Ratio,PAR)约束[68]、相似性约束[69]等条件下进行正交波形设计。为了提升FDA-MIMO雷达探测、对抗、成像等应用领域性能,其常用正交波形设计准则包括最小化加权积分旁瓣电平准则[70,71]、最大信干噪比(Signal to Interference plus Noise Ratio,SINR)准则[72,73]、最小化均方误差(Mean Square Error,MSE)准则等。其中通过最小化自相关旁瓣与互相关电平,更有利于减小波形分离后的残余量,提升FDA-MIMO雷达解模糊性能。对于离散波形集合,加权后的积分旁瓣电平PWISL可以表示为[74]
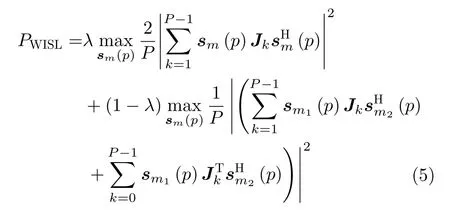
其中,(·)H表示共轭转置运算,该式第1部分表示自相关函数旁瓣,第2部分表示互相关函数,P表示多相编码数,即每个脉冲所划分的子码片个数,∈CP×P表示移位矩阵,0表示零矢量,λ∈(0,1)为加权因子。
值得一提的是,针对MIMO正交波形,除了码分正交信号外,可以通过频分正交方式得到正交波形[75,76],其发射功率也具有距离-角度耦合[77],但是其与FDA-MIMO的区别是,其各阵元发射相同基带波形,如线性调频信号、非线性调频信号等,且发射通道间的频率间隔 Δf通常大于等于带宽以保证波形间的正交性。
2.2 低截获特性与波形设计
相干FDA发射方向图具有距离-角度-时间三维依赖特性[4],脉冲体制下其表达式为[4,8]
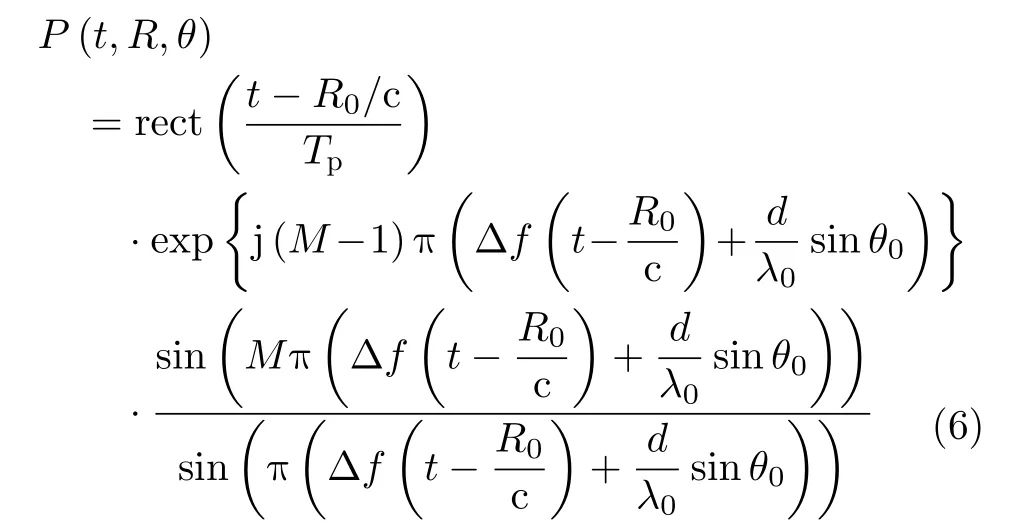
其中,R0表示距离变量。
如图4(a)所示,在任意给定时刻,FDA空间电场分布具有S型特性,且覆盖全角度范围,在远场空间任意一点处,随着时间的变化,都会周期性地随着快时间历经方向图的主瓣和旁瓣[4]。相比于传统相控阵雷达,FDA可利用宽发射天线波束降低雷达在目标区域的发射功率。实际上,如图4(a)-图4(c)所示,FDA发射方向图的空间覆盖性与脉宽Tp和 Δf有关,对于给定的 Δf,当Tp=1/Δf时可以实现全空域覆盖,若Tp<1/Δf仅覆盖部分区域。图4(d)给出了相同Tp内发射方向图的距离维剖面,根据发射方向图表达式,其距离主瓣宽度(距离分辨率)由 Δf决定,即2 c/(MΔf)[8]。

图4 相干FDA发射方向图空域覆盖性分析Fig.4 Analysis on the spatial coverage of the transmit beampattern for coherent FDA
需要说明的是,对于FDA-MIMO雷达,由于其发射正交波形,与传统MIMO雷达一致,其发射方向图无方向性,且功率在空间和时间都均匀,不具有距离-角度S型分布特性[8]。对于FDA-MIMO雷达接收匹配滤波器设计将在2.3节详细描述。
针对FDA-MIMO雷达低截获波形,文献[63]在每个天线上的能量恒定下,结合输出信杂噪比(Signal-to-Clutter-plus-Noise Ratio,SCNR)约束,通过最小化目标区域(距离-方位)的辐射能量设计低截获波形,其优化问题构建为[63]
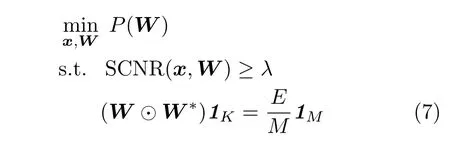
其中,m in(·)表 示取最小值,W∈CM×K表示发射波束矩阵,CM×K表示M×K维复矩阵,K表示正交波形数,λ表示目标 SCNR 门限,x表示接收滤波器,P(W)表 示发射信号在目标处的功率,1K和1M分别表示K维和M维全1矢量,第1个约束保证目标的输出SCNR不低于一个给定的阈值;第2个约束表示每个天线上的能量恒定。进一步采用迭代算法,首先随机初始化W,利用广义瑞利熵求解x,再根据基于辅助变量和交替方向乘子法求解W,直至收敛可得到优化后的低截获波形。
2.3 接收信号处理
相干FDA雷达中,考虑接收端非自适应波束形成技术,为了实现对空间任意点的匹配滤波,需要对每个空间角度设计一个匹配滤波函数,其匹配滤波函数是角度时间的二维函数,可以具体表示为[78]
可见,相干FDA雷达体制下的匹配滤波函数取决于基带波形和发射方向图,可同时实现快时间维匹配滤波和发射波束形成。图5给出了相干FDA雷达对应的两种理论等价接收处理结构。由于发射方向图可以在接收端等效合成,因此,相干FDA雷达的信号处理可在发射波束域空间进行[78]。即构造发射波束域M个正交的匹配滤波函数,其角度参数θm=arcsin(2(i-1)/M -1)。考虑图5第1种结构,对应的发射波束域回波数据矢量仅与接收导向矢量有关;若考虑第2种结构,则对应的发射波束域回波数据与收发虚拟导向矢量有关。进一步,可以构造最小无失真响应(Minimum Variance Distortionless Response,MVDR)准则下的信号处理器[78]。
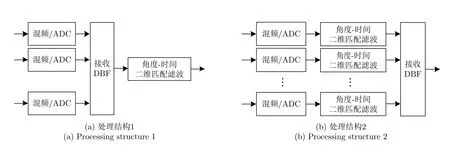
图5 相干FDA接收机基本结构Fig.5 Basic structures of coherent FDA receiver
实际在干扰和杂波抑制过程中,由于干噪比/杂噪比的不同,两种处理结构存在性能差异。需要说明的是,当角度-时间二维匹配滤波和接收波束形成对应的角度保持一致时,可实现对目标方向的最大匹配输出[78]。
对于FDA-MIMO雷达,首先对接收信号经过ej2πf0t混 频后需要设计匹配滤波器去除ej2πΔf(m-1)t这一时变因子的影响。方便起见,图6给出了第n个接收天线对应的两种匹配滤波器设计结构,每个接收天线的处理方法相同。其中,在第1种处理结构中,每个接收通道的信号先进行与 Δf相关的数字混频,再进行发射波形的匹配[40];而在第2种结构中,可以直接设计与 Δf相关的匹配滤波器[25]。
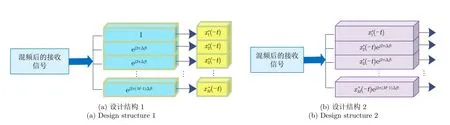
图6 FDA-MIMO雷达接收匹配滤波处理流程Fig.6 Processing procedurse of receive matched filtering in FDA-MIMO radar
具体来说,第1种结构得到矢量信号可以表示为[40]
采用第2种结构可得到的输出矢量表达式为[25]
可见,经过接收端处理后能够得到目标的距离维信息。实际上,在高斯白噪声背景下两种接收处理结构等价。
3 参数估计与目标检测一体化
3.1 估计检测一体化模型
通常,目标检测与参数估计是两个独立过程,即确定主瓣内存在目标后再采取参数估计手段对目标定位,实际上,采用单脉冲进行空域处理可在确认目标存在的同时输出目标角度,然而现有方法无法通过空域处理同时得到目标的距离和角度信息[79]。由于FDA-MIMO雷达具有能同时获取目标距离和角度信息的优势,因此可同步实现多维参数估计与目标检测。实际中,往往需要在杂波、色噪声等非均匀环境下,通过构建目标检测与参数估计联合框架,解决在对目标检测的同时输出未知参数。
考虑在高斯背景下(杂波或者高斯白噪声)基于FDA-MIMO雷达进行自适应目标检测,假设存在一组训练样本,即zk(k=1,2,...,K),K≥MN表示样本数,z∈CMN表示来自待检测单元匹配滤波后的回波矢量。因此,检测问题可以构建为如下的二元假设检验问题[25]:
根据Neyman-Pearson 准则,上述二元假设检验问题的似然比检验(Likelihood Ratio Test,LRT)为最优检测器,然而实际中由于β1,θ0,Δτ,Q未知,可基于GLRT准则设计检测器为

另外,若假设Q已知,则两步GLRT检测器(也称为自适应匹配滤波(Adaptive Matched Filter,AMF))可以构建为

g(z |β1,u,δ,Q;H1)和g(z |Q;H0) 分别表示H1和H0假设下的概率密度函数(PDF),首先假设协方差Q已知,然后利用样本协方差矩阵S来代替Q,经过运算后得到AMF检测器最终表达式为
3.2 近似优化方法
实际上,文献[9]通过二维搜索的方式针对问题(16)进行距离与角度估计。然而,上述二维搜索中,为了获得精确估计结果,通常在角度和距离维进行较精细的间隔划分,从而导致计算量大。为解决这一问题,可以采用近似优化方法[10,25]得到角度和距离的估计值,并设计相应的自适应检测器。现详细介绍以下几种:
(1) 坐标下降(Coordinate Descent,CD)法。将二维搜索问题转化为两个一维搜索问题,即通过固定角度和距离两个变量中的一个,在另一个未知变量的取值区间中进行搜索,将结果代入后再对另一变量进行搜索,以此往复直至收敛。其中,A和B的离散值形式分别对应角度和距离的搜索区间,即[10,25]

图7给出了高斯噪声背景下FDA-MIMO雷达一体化距离-角度多维参数估计与自适应目标检测一体化结果。其主要仿真参数包括M=N=4,虚警率为 1 0-4。图7(a)与图7(b)分别给出了角度和距离估计的均方根误差(Root Mean Square Error,RMSE)结果,可见随着输入SINR的增加,采用所提CD和LAM方法估计结果的RMSE下降,且当SINR大于12 dB左右时,逼近其各自CRB。图7(c)给出了自适应目标检测结果,其中对于存在失配误差条件下,AMF检测器性能略优于GLRT检测器性能,即在相同输入信噪比(Signal-to-Noise Ratio,SNR)条件下具有更高的检测概率(Probability of detection,Pd)。另外,从图7可见所提近似优化方法接近最优检测器(参数已知)的性能,且性能明显优于失配检测器。
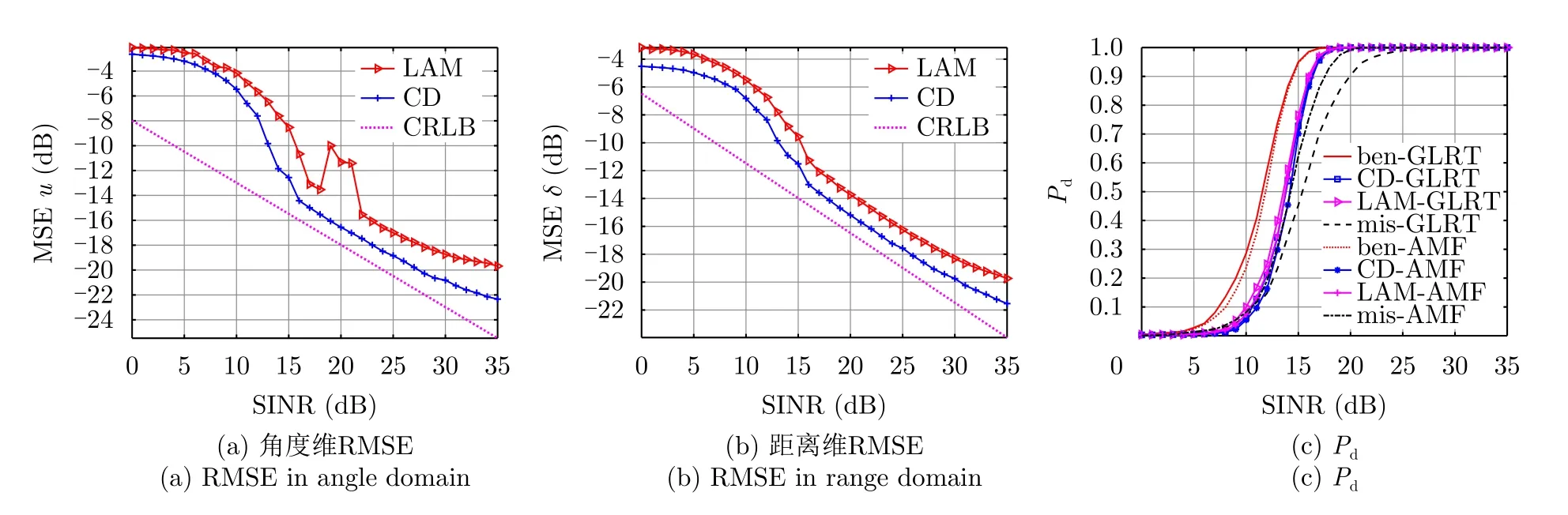
图7 FDA-MIMO雷达检测与估计一体化结果Fig.7 Integrated detection and estimation results in FDA-MIMO radar
4 解模糊与抗干扰一体化
4.1 FDA-MIMO雷达解距离模糊原理
在FDA-MIMO中,由目标发射导向矢量可得到其发射空间频率为

假设目标存在距离模糊,即其距离可以表示为

其中,r0表示一个距离无模糊周期内的主值距离,p表示跨脉冲数,Ru表 示最大无模糊距离,Na表示最大模糊数,则对主值距离补偿后的发射空间频率为

其中,T表示脉冲重复周期。可见发射空间频率包含了目标的发射距离模糊区序号p。进一步可以表示出其等效发射方向图:
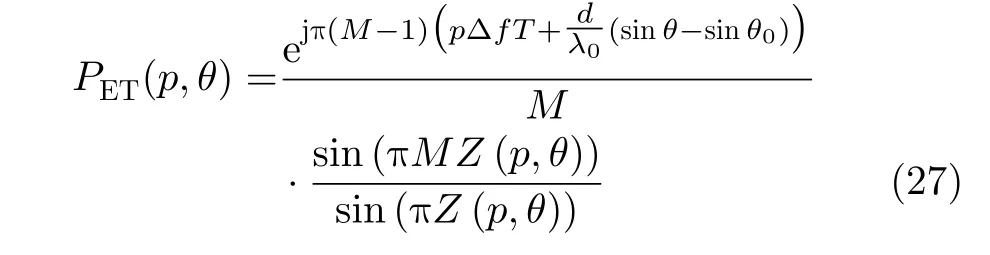
其 中,Z(p,θ)=pΔfT+d/λ0(sinθ-sinθ0)。可见,相比于传统雷达体制方向图,PET(p,θ)中由于存在与pΔfT相关的相位,使得原本方向图主瓣指向发生了偏移,且该偏移量由p决定。如图8所示,对于不同p,其等效方向图具有不同的指向,相当于给雷达的发射脉冲加上了一个等效的空域指向“标签”,因此可根据不同的主瓣等效指向,对不同发射脉冲进行区分,即实现了距离解模糊。另外,可通过多个脉冲指向不同的空域角度,即利用慢时间资源换取空间覆盖性。
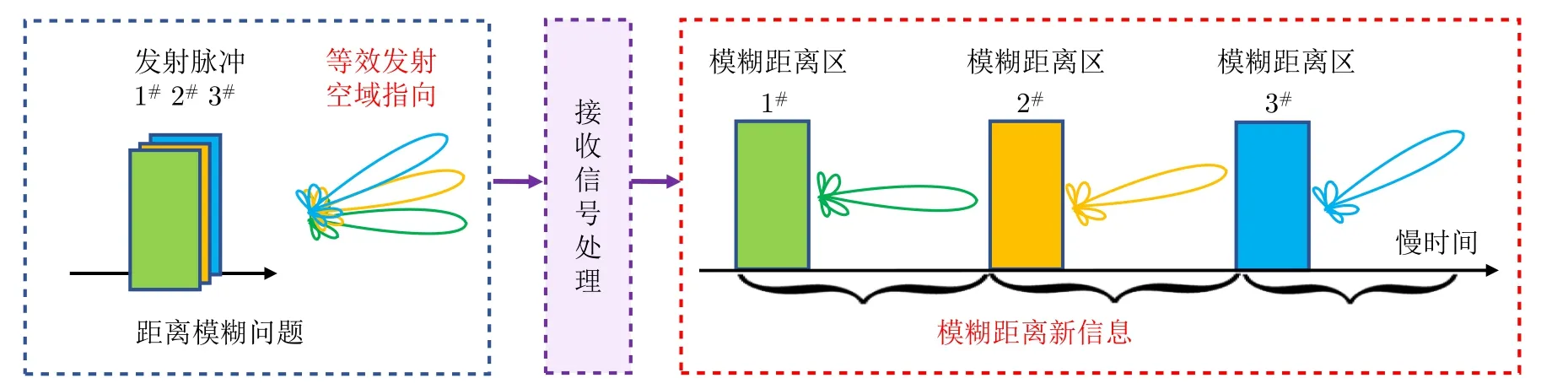
图8 FDA-MIMO雷达解距离模糊示意图Fig.8 Principle of resolving the range ambiguity in FDA-MIMO radar
实际上,将FDA-MIMO的第m个发射信号拓展至第k个脉冲可得

其中,ϕm(t)表示第m个阵元发射的正交波形。可见不同发射脉冲(慢时间)存在相位差ej2π(m-1)Δf(k-1)T,且该项随着不同发射通道m和脉冲k变化。实际上,若令γ≜ΔfT,则可以得到EPC-MIMO雷达[80]。文献表明EPC-MIMO雷达具有与FDA-MIMO雷达等效的解距离模糊特性[8]。然而需要注意的是,FDA-MIMO与EPC-MIMO雷达在抑制与真实目标位于相同发射脉冲的假目标方面具有局限性。
4.2 基于解模糊的抗主瓣干扰方法
考虑自卫式干扰,即目标与干扰机角度相同。干扰机通过对截获的信号进行调制转发后形成若干假目标(即全脉冲转发形式)。对于距离拖引式干扰,跟踪制导雷达采取脉冲前沿跟踪的方式提取目标的距离维信息。进一步,可以表示出经过RDC后的真、假目标的发射空间频率[39]
由式(29)第1个式子可见,补偿后的真实目标由于发射与接收空间频率fR=d/λ0sinθ0相等,即真实目标位于发射-接收二维空域平面的对角线,而延迟了p个发射脉冲(即存在p重距离模糊)的假目标由于具有偏移量 ΔfT=-2ΔfpRu/c,可在发射空域上实现任意分布。如图9所示,尽管真、假目标的距离在一个无模糊区间(即图9中距离模糊区2)内可能存在超前和滞后的关系,假目标所在实际等效距离一定大于目标的真实距离[40]。值得注意的是,若假目标经过快速转发后形成,且与真实目标位于相同的距离模糊区(如图中假目标1),则此时抗干扰失效。换言之,在一个无模糊区间内,超前于真实目标的假目标均可抑制,但是落后于真实目标的假目标则不一定可以抑制。即FDA-MIMO雷达只能对存在距离模糊的欺骗式干扰进行有效抑制。
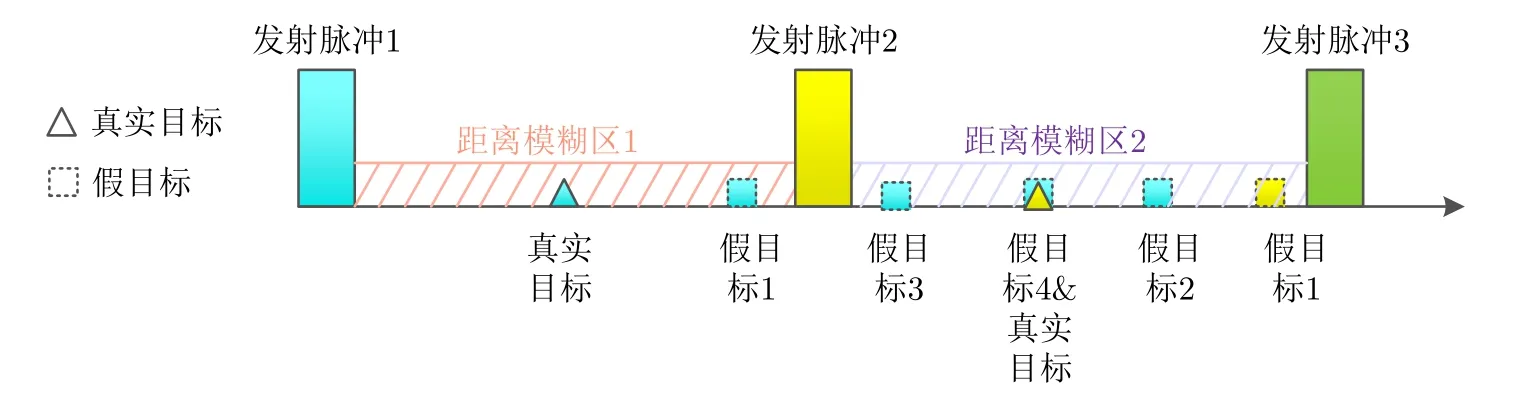
图9 假目标产生示意图Fig.9 Generation of false targets
鉴于FDA-MIMO雷达在解距离模糊上的优势,现有抗干扰方法大多体现在空域波束形成上,包括非自适应波束形成和自适应波束形成[40]。图10(a)和图10(b)分别给出了基于非自适应波束形成和自适应波束形成的收发二维空域的等效发射方向图剖面。如图所示,由于假目标发射空间频率相对于真实目标产生了偏移,且偏移量 ΔfT与延迟脉冲数有关,可通过对频率步进量进行设计,使得假目标等效方向图主瓣对准真实目标的零点,通过方向图调零的方式抑制干扰[45,81]。其中,可以根据方向图零点与假目标指向的关系来设计频率步进量:

另外,可构造基于MVDR的自适应波束形成器,如图10(b)所示,在距离-角度二维空域自适应地形成零点,从而抑制距离维失配的假目标[34,39,40]。其自适应波束形成器可以表示为
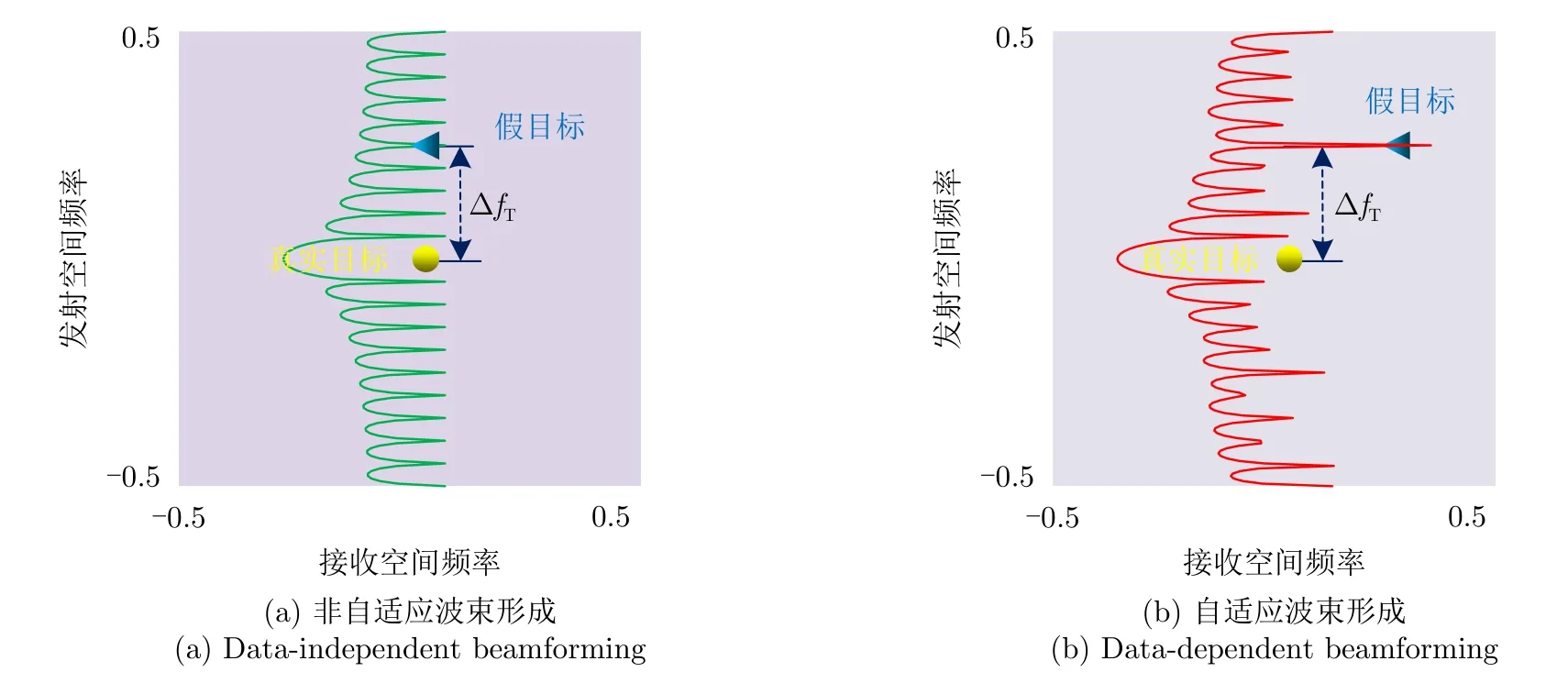
图10 基于波束形成的FDA-MIMO雷达抗主瓣欺骗式干扰方法Fig.10 Mainlobe deceptive jammer suppression with beamforming in FDA-MIMO radar
其中,Rj+n表示干扰加噪声协方差矩阵,w=为自适应权矢量。
实际应用中,采用波束形成方式抗干扰会存在一定性能损失,因此需要研究基于稳健波束形成抗干扰方法。针对非自适应波束形成抗干扰方法,由于阵列/系统误差导致目标参数与理论值存在偏差,假目标无法位于零点。对此,可通过展宽零点来充分抑制干扰,并展宽主瓣来提升抗干扰稳健性。文献[13]提出了基于虚拟干扰的预设宽零点波束形成(Preset Broadened Nulling BeamFormer,PBNBF)算法,文献[46]通过对收发二维方向图的权矢量进行正交分解,提出了一种预设方向图综合(Preset BeamPattern Synthesis,PBPS)方法展宽方向图主瓣与零点。如图11(a)和图11(b)所示,采用所提方向图设计方法均可显著提升输出SINR,匹配滤波结果仅目标处具有最大输出响应。针对自适应波束形成抗干扰方法,由于假目标分布不满足独立同分布条件,因此需要研究干扰加噪声协方差矩阵重构方法。对此,文献[41]提出了一种鲁棒的非一致样本检测(Nonhomogeneous Sample Detection,NSD)方法,通过挑选奇异样本并对目标分量进行剔除。文献[43]通过在收发二维空域构造接收主瓣子空间并利用正交投影方法对主瓣欺骗式干扰样本进行挑选。文献[44]提出了一种交替最小化的两步GoDec方法来抑制欺骗式干扰。如图11(c)所示,所提方法有效抑制距离维失配的干扰,具有较高的输出信干噪比。
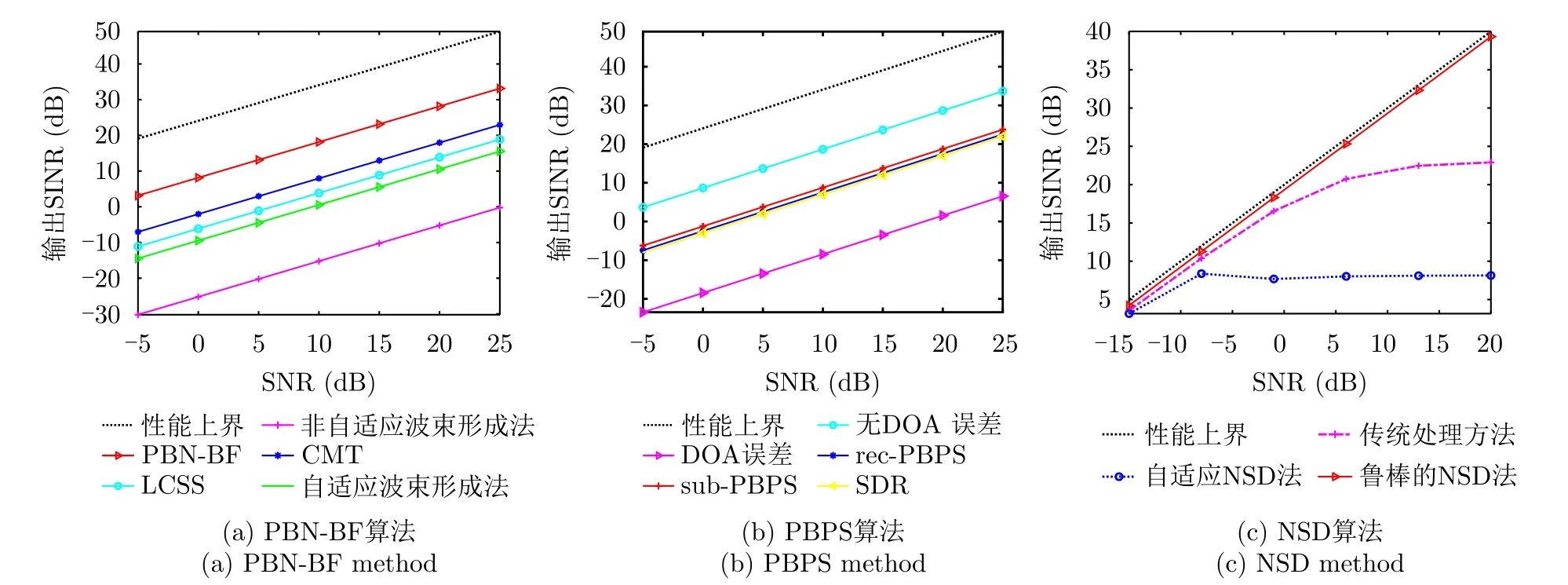
图11 FDA-MIMO雷达基于稳健波束形成抗干扰方法输出SINR结果Fig.11 Output SINR with robust beamforming for jammer suppression in FDA-MIMO radar
值得一提的是,笔者所在团队较早开展了频率分集系统原理样机研制工作,包括天线与射频组件、信号处理机、数据存储器、雷达系统显控等。并开展了转发式主瓣欺骗干扰抑制的外场实验验证。图12给出了频率分集系统原理样机及抗干扰验证结果。通过对比相控阵、MIMO雷达、FDA-MIMO雷达的抗干扰结果可见,相控阵与MIMO雷达由于缺乏足够的空域自由度因此无法抑制主瓣欺骗式干扰,相比之下,FDA-MIMO雷达通过利用引入的距离维自由度能够有效对抗主瓣欺骗式干扰,仅在目标处具有最大输出功率。实测数据经处理后与理论结果一致[8,40,82]。
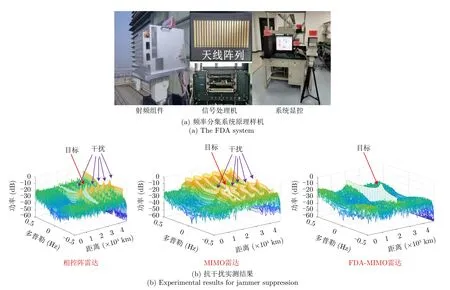
图12 频率分集系统抗干扰验证Fig.12 Verification of jammer suppression with FDA system
实际上,FDA-MIMO雷达可实现距离-角度-Doppler三维联合处理,基于其解距离模糊能力,可同步实现杂波与干扰抑制[6,30,31]。文献[29]提出FDA-MIMO STAP机载雷达的信号模型,图13(a)给出了发射-接收-时间三维空间中的真实目标、杂波、压制式干扰和欺骗式干扰的分布示意图[83],可见,真实目标和杂波分布在同一个平面上,压制式干扰仅在接收维具有角度依赖性,而假目标在三维空间中可被分辨。因此,通过将角度、Doppler和距离信息结合在FDA-MIMO STAP雷达中,真实目标就可以被检测出来,而假目标将被有效抑制。进一步,文献[83]提出了基于子空间投影技术的空时距离三维自适应处理(Space-Time-Range Adaptive Processing,STRAP)方法。该方法通过子空间投影方法在预滤波阶段实现欺骗式干扰抑制,并利用补偿后的数据估计杂波和压制式干扰的协方差矩阵,在发射-接收-时间三维空间上实现目标检测。图13(b)给出了输出SCJNR损失,可见所提方法可以实现一体化杂波与干扰抑制。
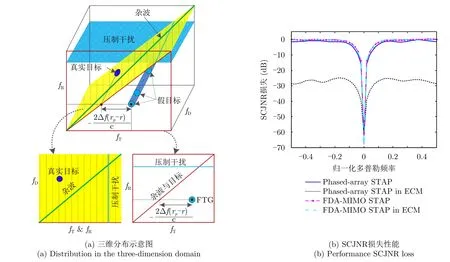
图13 基于FDA-MIMO STAP雷达的一体化杂波与干扰抑制Fig.13 Integrated clutter and jammer suppression in FDA-MIMO STAP radar
5 成像与动目标检测一体化
5.1 成像与动目标检测一体化设计原理
SAR成像和运动目标检测(Moving Target Indication,MTI)是机载雷达系统的两大任务,而天线波束扫描和系统带宽成为关键影响因素,通常,SAR成像要保证波束在区域相对较长时间的照射,为实现对动目标的检测,需要雷达波束扫描整个空间。此外,为提高SAR成像距离分辨率,需要宽带信号,而为实现动目标检测,发射窄带信号可以克服目标跨距离门走动问题。因此,现有成像与动目标检测一体化主要面临信号带宽不兼容、波束扫描不兼容两大问题。
为了实现一体化的SAR成像与MTI,可发射具有不同载频且互相正交的LFM信号。FDA雷达中,其相邻发射阵元间,因为存在一个较小的频率步进量,会导致频谱重叠,如果进一步增大频率步进量使其变为带宽,即 Δf=B,则不同阵元间的发射信号频谱互不重叠,即得到了频分正交信号[75,76]。其中,第m个阵元发射的信号可以表示为

其中,fm=f0+(m-1)B。其与FDA-MIMO雷达的主要区别是,FDA-MIMO雷达的频率步进量通常较小且不同阵元发射波形通常是码分正交,而频分正交雷达的频率步进量为带宽。文献[2]对该构型及功能进行了描述,如图14(a)所示,其中每个通道带宽为500 MHz,整个发射信号占据11~15 GHz的频带,图14(b)给出了9阵元的发射方向图。
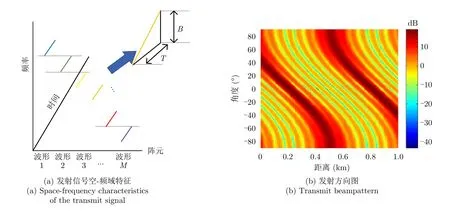
图14 频分正交LFM信号模型Fig.14 Signal model of orthogonal frequency diverse LFM signal
进一步,通过将不同通道所对应的窄带信号进行分离与频谱搬移,可实现不同空间通道信号的频谱重叠对齐。在接收端利用带通滤波、频谱对齐和匹配滤波等处理可以获得分离的窄带发射信号,进而实现MTI功能。另外,通过将空间不同通道的窄带信号进行频谱拼接合成可以获得频域宽带信号,进一步利用发射频率域差异来实现模糊回波信号的分离与无模糊SAR成像。
5.2 运动目标检测与高分宽幅成像方法
首先,为实现地/海面杂波背景下的动目标检测,可借助FDA-MIMO雷达空时频联合处理方法进行距离Doppler模糊杂波抑制[29]。实际上,在接收端分离发射波形后,可等效形成发射方向图,通过三维搜索实现对空间不同角度、不同距离模糊区域、不同Doppler的动目标检测[29]。考虑到FDAMIMO雷达中,距离模糊区域所对应的杂波在发射-接收二维空间是彼此分离的,进一步,文献[29]设计了FDA-MIMO雷达多维波束域降维信号处理方法,对于任意角度,可在主距离模糊区周围的发射和接收空域中形成多个波束。图15给出了FDAMIMO雷达第1距离模糊区、天线法线方向的运动目标检测的局域化多波束示意图[4]。
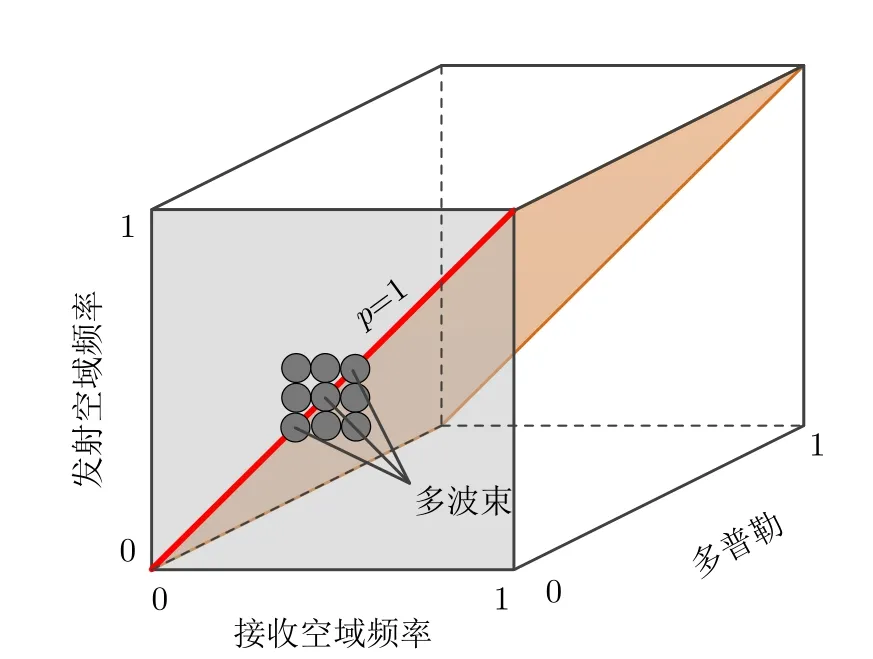
图15 FDA-MIMO空时频局域化处理示意图Fig.15 Diagram of space-time-frequency localized processing with FDA-MIMO
因此,3DL自适应距离-角度-Doppler处理器可以表示为[29]
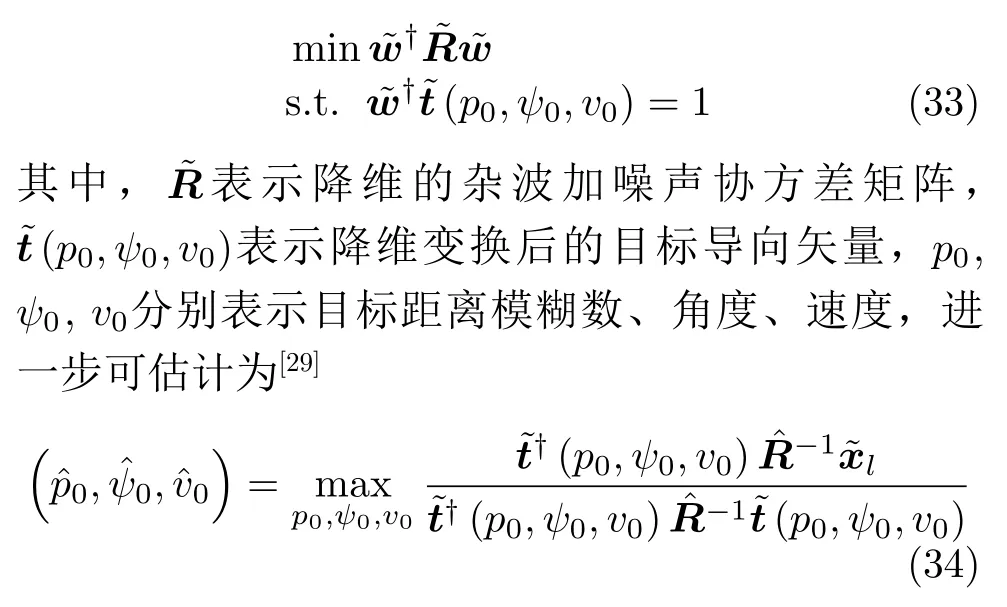
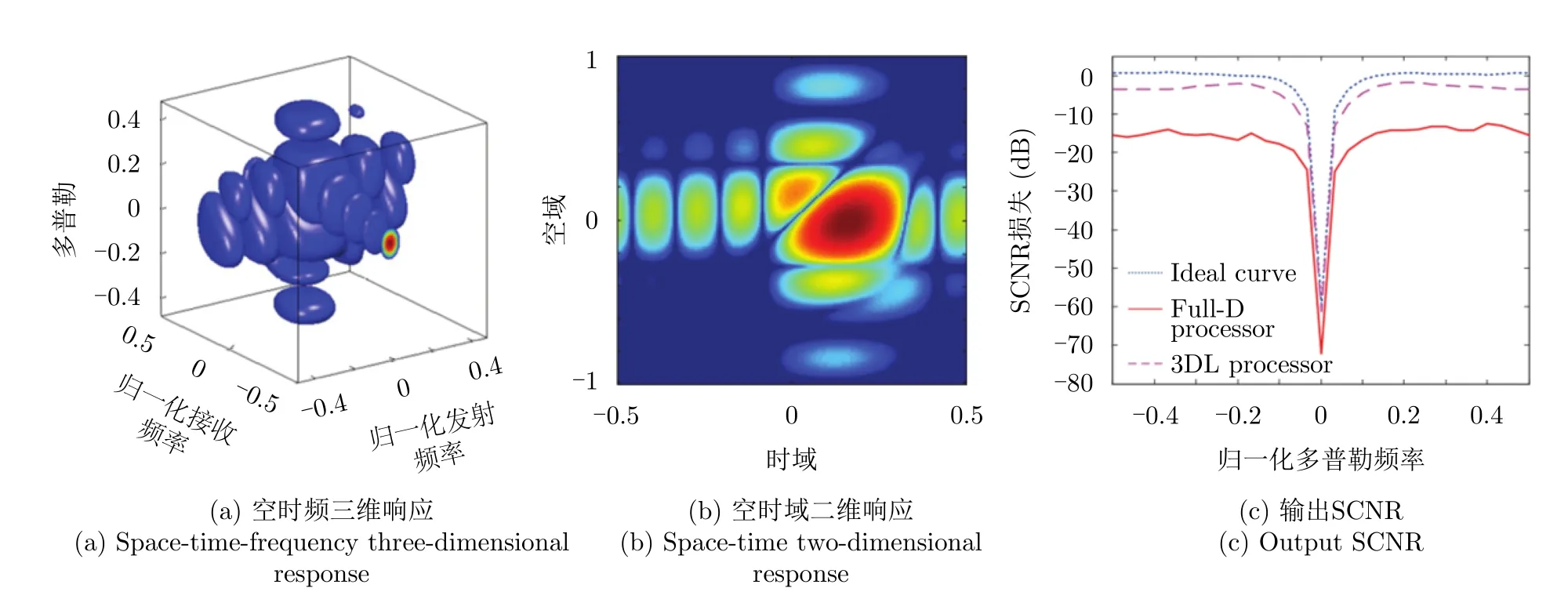
图16 FDA-MIMO降维处理器结果Fig.16 Results on dimension reduction processor in FDA-MIMO
针对SAR成像,文献[84]提出了一种基于多子带FDA的高分宽幅SAR成像方法。其发射阵列由多个子阵组成,每个子阵内各阵元发射的波形相互正交且有一个略小于或等于信号带宽的频率增量,可通过子阵内距离角度二维依赖特性解决距离模糊问题,并通过频谱拼接技术获得大带宽信号来获得高距离分辨率。
图17给出了其信号处理流程。回波首先进行匹配滤波处理恢复发射端的自由度,随后进行接收波束形成获得全部接收孔径的增益。然后在子阵内通过距离依赖补偿和发射波束形成将距离模糊回波分解成多个无模糊部分。接着,将各个子阵对应的无距离模糊信号进行相位补偿去除多余相位,再将所有子阵对应的信号在距离频域通过频谱拼接技术实现大带宽信号的合成。最后,将拼接好的信号进行成像处理即可得到完整HRWS-SAR成像结果(如图18所示)[84]。
图17 基于多子带FDA的高分宽幅SAR成像处理流程Fig.17 Procedure of HRWS SAR imaging based on multiple sub-band FDA
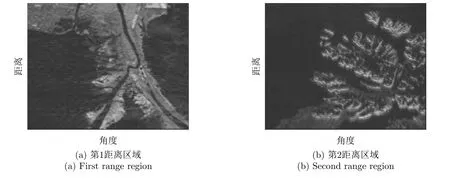
图18 子带FDA-HRWS成像结果Fig.18 Imaging results of sub-band FDA-HRWS
6 总结与展望
6.1 结语
面对复杂电磁环境下目标精细化探测需求,多功能一体化雷达技术已成为发展的必然趋势。FDA具有发射宽覆盖的雷达发射方向图,通过接收端等效波束形成技术可实现灵活的波束。另外FDA具有更高的系统自由度,通过合理的系统设计和接收处理手段能够实现多功能一体化应用。本文针对FDA这一研究热点,对其多功能一体化理论与方法进行了分析与归纳,重点研究其一体化波形设计方法,分析其在检测与估计一体化、解模糊与抗干扰一体化、成像与动目标检测一体化处理技术。然而,现有FDA雷达在快速转发的主瓣干扰抑制、正交波形设计、系统设计等方面仍存在一定局限性。目前,现有针对FDA的一体化研究仍处于理论层面,仍需进一步论证FDA雷达同时多功能多任务技术,提升雷达系统态势感知能力、集成度和综合性能。
6.2 发展趋势与未来展望
结合雷达实际应用需求与目前FDA研究现状,FDA雷达多功能一体化技术仍需从以下方面开展深入研究:
(1) 空时频联合调制波形设计。FDA具有灵活的波束赋形能力,未来仍需进一步研究其空时频联合调制的波形设计与优化方法。空域方面,需要研究发射宽波束设计方法和等效收发联合多波束技术,进一步解决系统多功能在空间波束扫描上的矛盾;时频域方面,考虑结合超宽带等技术提高一体化波形瞬时带宽,充分利用多维度调度系统资源。根据任务和环境选择折中波形,建立面向多任务的发射波形库。
(2) 结合认知雷达的智能化处理。如今,复杂电磁环境对雷达系统态势感知能力的要求不断提升。多功能雷达系统需要通过与环境的交互学习,获取环境的信息,并结合先验知识和推理,自适应调整接收机和发射机参数,对信号进行闭环处理,实现认知、决策、执行、评估和优化[85,86]。为适应未知电磁环境的多样性与时变性,未来多功能一体化系统也朝着智能化、数字化、模块化、网络化的趋势发展,并以较小规模的计算达到系统总体性能最优。
(3) 多功能一体化FDA系统实现。基于FDA多功能一体化系统不仅依赖于理论创新,还需研制FDA多功能一体化系统,在不同场景下对其同时多功能性能进行试验验证。进一步,研究单片集成方法也是数字化发展的必然趋势,通过在聚集多功能的基础上缩小雷达体积并降低成本,可以不断扩大雷达应用领域。
