4WID车辆主动安全控制策略研究
2022-11-01毕凤荣孙浩轩张立鹏刘乐海
毕凤荣,孙浩轩,张立鹏,刘乐海,王 杰
4WID车辆主动安全控制策略研究
毕凤荣1, 2,孙浩轩1,张立鹏2,刘乐海1,王 杰1
(1. 天津大学内燃机燃烧学国家重点实验室,天津 300072;2. 天津内燃机研究所,天津 300072)
针对4WID车辆主动安全控制,设计开发了一种基于主动前轮转向(active front steering,AFS)、直接横摆力矩控制(direct yaw-moment control,DYC)与驱动防滑(acceleration slip regulation,ASR)集成的控制系统.控制系统采用分层控制结构,其中决策层基于滑模变结构控制理论与车辆相平面稳定判据,设计了横摆角速度与质心侧偏角协调控制器,计算保持车辆稳定性所需的附加横摆力矩.此外,基于滑移率门限值,设计了模糊PI控制器,分配AFS模块与DYC模块输入的附加横摆力矩,获得最终附加横摆力矩与附加前轮转角.执行层通过对驱动/制动力矩与前轮转角的控制,实现速度保持,滑移率控制与车辆稳定性控制功能.仿真结果表明,在高速、低附着系数路面的极限工况下,集成控制策略可实现车辆操纵稳定性控制且综合性能优于单独 控制.
主动前轮转向;直接横摆力矩控制;驱动防滑;滑模控制;车辆稳定性控制
电子稳定性控制系统(electronic stability program,ESP)是车辆主动安全系统的重要组成部分,对车辆安全性与操控性的提升起到重要的作用[1].其主要包括制动防抱死系统(antilock brake system,ABS)、直接横摆力矩控制(direct yaw-moment control,DYC)系统、驱动防滑(acceleration slip regulation,ASR)系统等.ESP功能的实现主要基于对车辆驱动/制动系统的控制.随着电子信息技术、线控技术的应用和发展,主动前轮转向技术(active front steering,AFS)也逐渐被应用到车辆的操纵稳定性控制中[2].
Güvenc等[3]对差动制动与主动转向进行了协调以控制车辆的横摆稳定性,并通过给定的权重系数将附加横摆力矩分配给两个子系统.黄龙等[4]基于模糊PID控制理论,采用前馈-反馈的控制结构并提出了一种DYC/ASR集成的控制策略对制动力矩进行分配,保证节能性的同时保证了车辆在极限工况下的稳定性.Wang等[5]采用分层控制结构设计了二阶LQR控制器.其中,高阶控制器计算横摆角速度,低阶控制器实现对车辆动力学的跟踪以保证轮胎在稳定区间工作.Yang等[6]设计了基于AFS的PID/SMC复合控制器,控制系统的鲁棒性较单一控制获得一定的提升.本文针对4WID(4 wheels independent drive,4WID)车辆,在Simulink中搭建了整车七自由度动力学模型并引入二自由度参考模型状态反馈,提出一种AFS/DYC/ASR协同的车辆主动安全控制策略.
1 车辆模型
1.1 七自由度车辆动力学模型
本文研究的主要内容为车辆的横摆稳定性,故主要考虑车辆在水平面的运动,包括纵向、侧向及横摆运动,对车辆的俯仰、侧倾以及垂向运动不予考虑.建立七自由度整车动力学模型如图1所示,包含沿轴的纵向运动、沿轴的侧向运动、绕轴的横摆运动以及4个车轮的转动[7].由牛顿第二定律可得车辆运动学方程.
车辆纵向运动微分方程为


车辆侧向运动微分方程为


车辆横摆运动微分方程为


式中:f为前轮距;r为后轮距;f为前轴距;r为后轴距;v、v分别为纵向车速和侧向车速;I为车辆绕轴的转动惯量.
轮胎作为路面与车体间传力的唯一媒介,在车辆动力学中有着重要的作用,轮胎模型的选择直接影响着分析结果的准确性.因此,本文采用Pacejka提出的魔术轮胎模型[8],其在常规工况与极限工况下都具有较高拟合精度.魔术公式的一般表达式为
式中:为输出变量;为输入变量;、、、分别为刚度因子、形状因子、峰值因子、曲率因子;V、H分别为水平方向漂移、垂直方向漂移.
车轮运动微分方程为


各轮中心速度为
车轮侧偏角为
车轮滑移率为
式中=fl,fr,rl,rr.
1.2 二自由度车辆理想模型
线性二自由度车辆模型,其模型结构简单,包含的车辆特征参数较少,但能够很好地反映车轮转向角与质心侧偏角及横摆角速度的关系.因此,本文使用线性二自由度模型作为所设计控制器的参考模型.其运动学微分方程为
式中:f、r分别为前轴、后轴的侧偏刚度;v、v分别为纵向车速和侧向车速;f为前轮转角;ω为横摆角速度;f、r分别为质心到前、后轴距离.
2 分层控制策略
2.1 分层控制结构
分层控制结构因其层次之间目标明确、相对独立,且能够很好地协调各子系统间的工作而在汽车底盘集成控制系统中得到广泛应用[9].
本文的AFS、DYC和ASR集成控制采用上、下两层设计,其结构如图2所示.从图2中可知,本文所设计的分层控制结构包括决策层与执行层.其中,决策层基于滑模变结构控制理论,根据横摆角速度与质心侧偏角的跟踪误差计算出维持车辆稳定性所需的附加横摆力矩,并联合滑移率门限控制计算出分配给DYC与AFS控制模块的权重.执行层通过对车辆驱动/制动系统以及转向系统的控制以实现车速跟踪,滑移率控制与车辆稳定性控制.
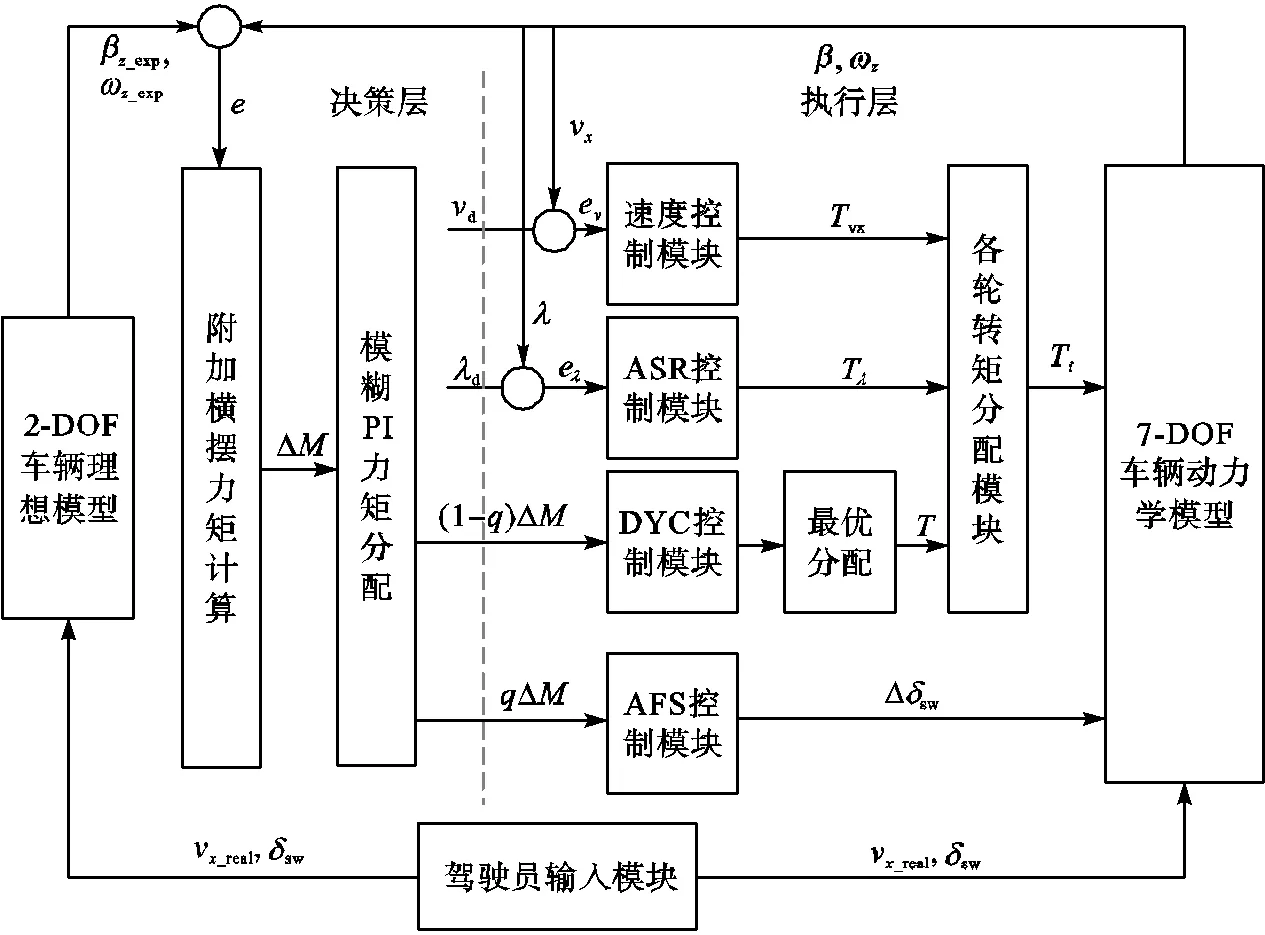
图2 分层控制结构
2.2 决策层
2.2.1 附加横摆力矩计算
定义横摆角速度跟踪误差及其导数为
定义滑模面为


推出由横摆角速度计算所得的附加横摆力矩为

同理,由质心侧偏角计算所得的附加横摆力 矩为
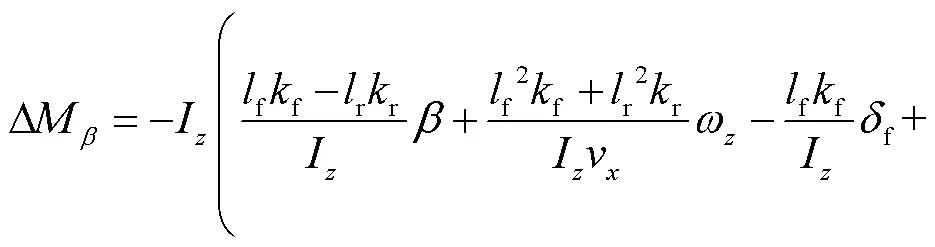
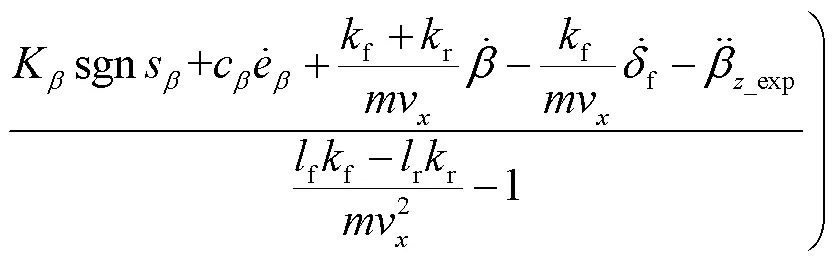
线性分配方法如式(16)所示.
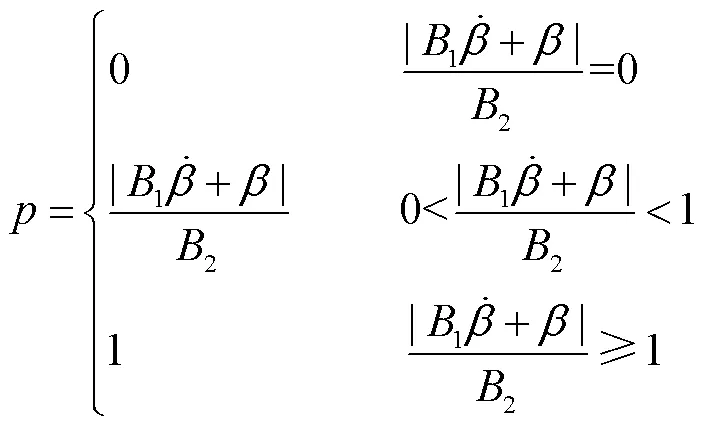
式中1、2的取值如表1所示[12].
表1 相平面稳定性边界参数
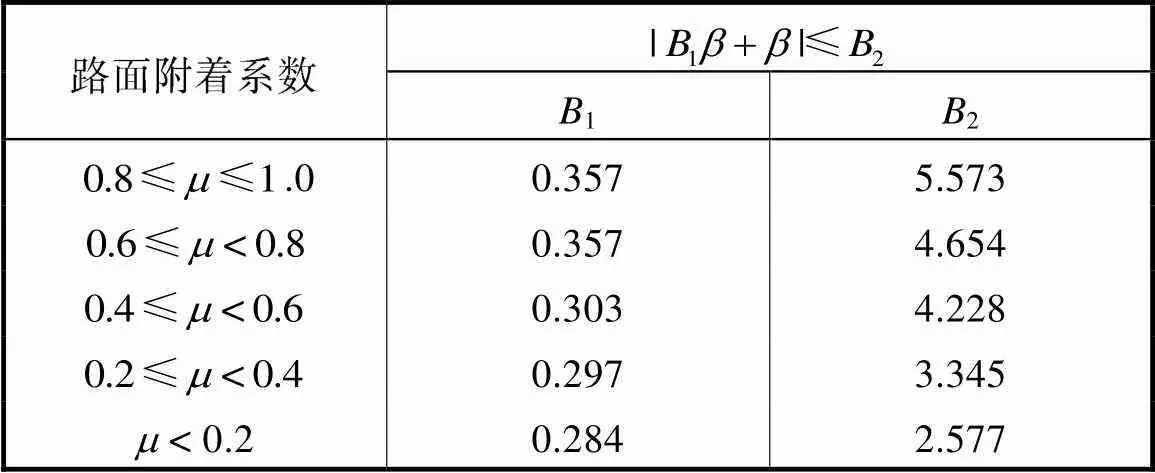
Tab.1 Phase-plane stability criterion parameter

2.2.2 基于模糊PI的力矩分配

2.3 执行层
2.3.1 AFS控制模块

2.3.2 车速跟随控制模块
设计了PI控制器如图3所示,由车辆的期望车速与实际车速,通过PI控制方法得出实现车辆速度跟随所需的总纵向力矩vx.
式中:、分别为理想车速与实际车速;为踏板开度,;、为PI控制器参数;为速度系数,由电机最大转矩决定.
2.3.3 ASR控制模块
采用比例P控制滑移率.当滑移率小于最优滑移率0.15时,不开启该滑移率控制模块;当滑移率超过0.15时,采用比例控制反馈方式,降低输出 转矩.
2.3.4 DYC控制+最优分配模块
设计优化分配的目标函数为
具体的约束条件为
由拉格朗日乘子法即可求得分配给各车轮力矩的最优解为
3 仿真试验
本文选取车辆模型的主要参数如表2所示.
表2 车辆技术参数
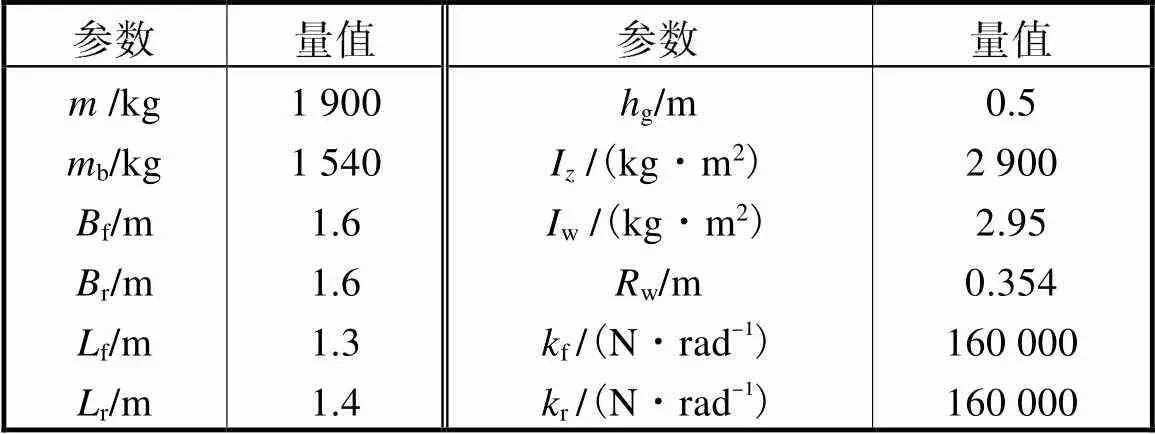
Tab.2 Vehicle technical parameter
3.1 单移线操作仿真试验
首先通过单移线开环工况仿真,来评价集成控制策略的控制效果.针对车辆以高速在雨雪路面行驶的工况,选取车速为90km/h,路面附着系数为0.4,前轮最大输入转角为10°.在该工况下,将AFS/DYC/ASR协同控制的控制效果、DYC单独控制的控制效果与无控制的效果进行了包含横向位移、横摆角速度、相平面图、纵向车速、车轮滑移率与电机输出转矩6个维度的对比,车辆状态响应如图4所示.
从图4(b)车辆的横向位移可以看出,在不施加控制的情况下,车辆无法完成单移线操作,而DYC单独控制与联合控制均能够通过对横摆力矩的控制从而保证车辆行驶的稳定性.图4(c)、(d)分别为不同控制策略下横摆角速度的响应结果和质心侧偏角-质心侧偏角速度相平面图.从图4中可以看出,无控制时,横摆角速度因路面能提供的侧向力不足而出现较大振幅的振荡且质心侧偏角-质心侧偏角速度相平面图无法收敛;而与单独的DYC控制相比,联合控制可以准确地跟踪期望的横摆角速度,其响应速度相对更快,且由于联合控制可以基于滑移率对前轮转角进行主动修正,其控制效果更好.图4(e)为车辆纵向车速,可以观察到DYC单独控制与联合控制均能较为有效地实现车速保持,而联合控制在车速保持方面有着一定的优势.图4(f)表明,联合工况下的滑移率远远低于DYC单独控制下的滑移率,其尖峰值降低了36.8%.
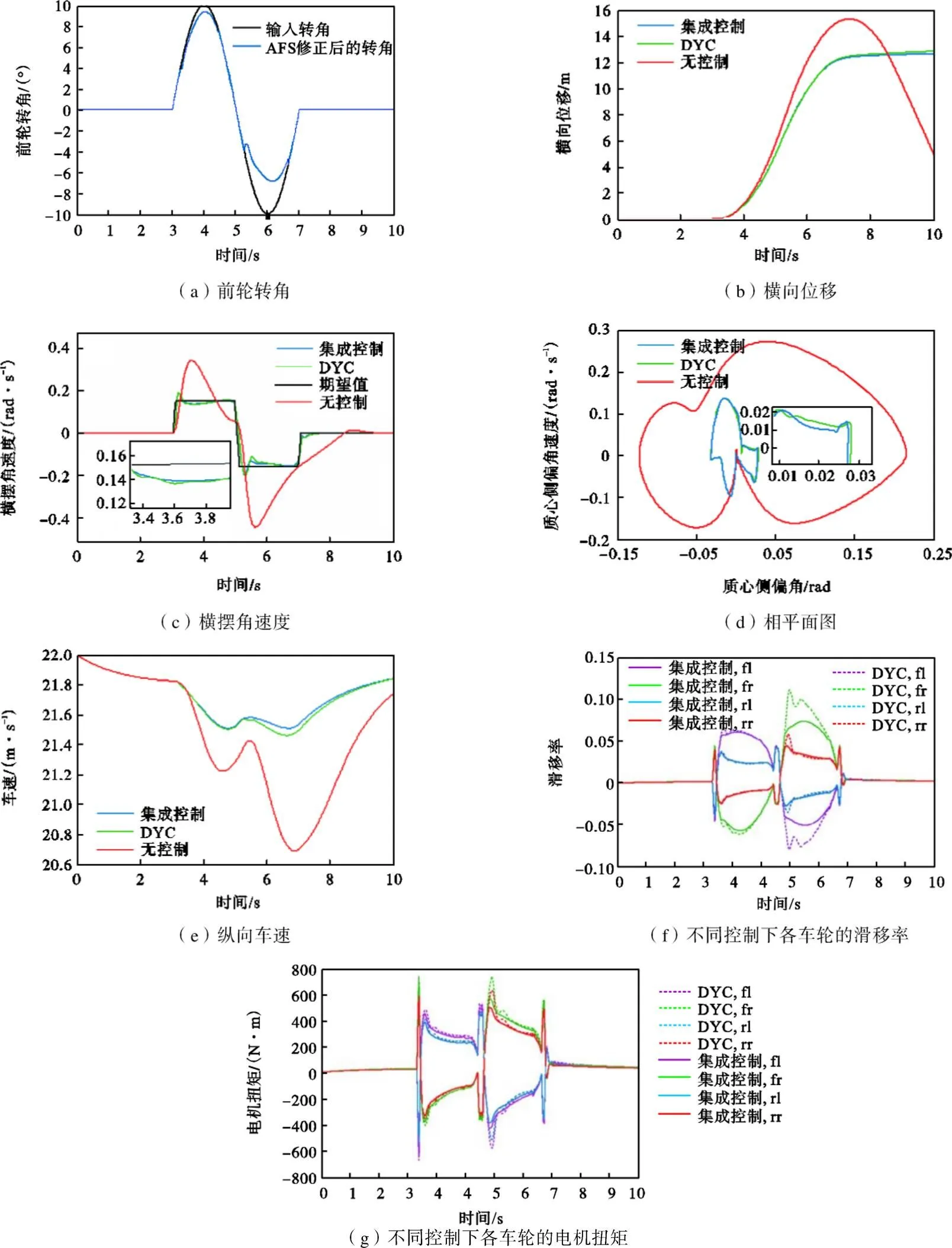
图4 单移线工况下车辆状态响应
由轮胎的摩擦椭圆特性可知,通过联合控制能够获得更大的轮胎纵向力裕度,以提供紧急状况下的驱动/制动力.图4(g)为DYC工况与联合工况下各车轮的电机转矩,结合图4(a)可以看出,在3.4s、5.3s时AFS的介入使得在该控制策略下,车轮输出转矩尖峰值最多降低了13.5%,更加节能.
3.2 双移线操作仿真试验
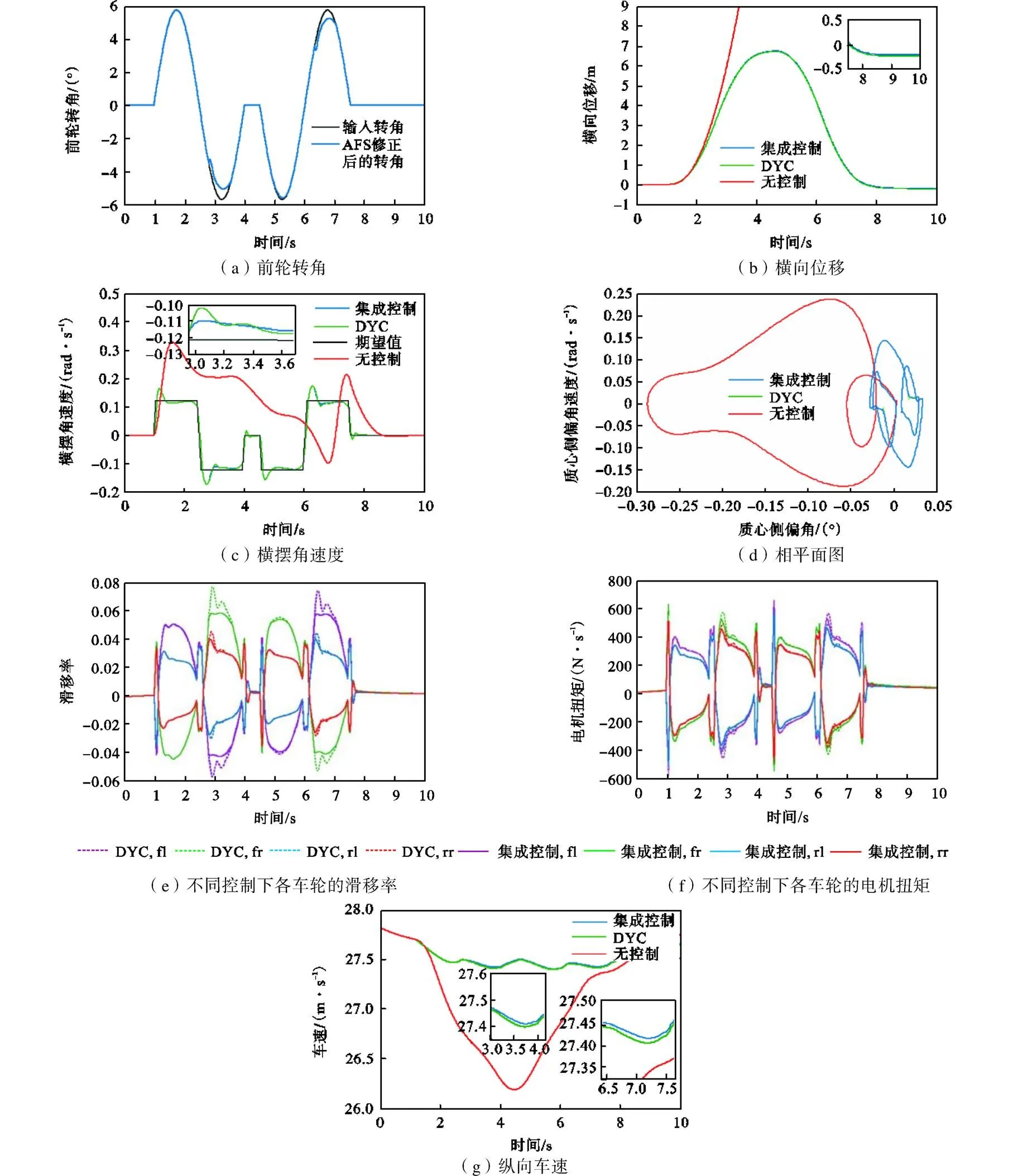
图5 双移线工况下车辆状态响应
图5(b)为车辆的横向位移,可以看出,在不施加控制的情况下,车辆无法完成双移线操作,而联合控制与单独的DYC控制均能实现双移线操作,使车辆按照预期的轨迹行驶,且联合控制的效果相对更佳.从图5(c)不同控制策略下横摆角速度的响应结果中可以看出,无控制工况下,车辆无法良好地跟随理想横摆角速度,而与单独的DYC控制相比,联合控制可以准确地跟踪期望的横摆角速度,响应速度相对更快,控制效果更好,且在相同控制器参数下,控制器抖振更小,具有更强的鲁棒性.图5(d)为不同控制策略下的质心侧偏角-质心侧偏角速度相平面图,从图5中可以看出,联合控制与DYC单独控制下的车辆均处于稳态区域,而无控制车辆已经失稳,这在横向位移与纵向车速中也有着相应的显示.图5(e)表明,联合工况下的滑移率远远低于DYC单独控制下的滑移率,其尖峰值降低25.6%,能够获得更大的轮胎纵向力裕度,以提供紧急状况下的驱动/制动力,获得更大的安全保障.图5(f)为DYC工况与联合工况下各车轮的电机转矩,结合图5(a)可以看出在2.8s、6.3s时主动前轮转向系统的介入使得联合控制策略下,车轮输出转矩尖峰值最多降低了7.1%,经济性更好.图5(g)为车辆纵向车速,可以观察到联合控制在车速保持方面有着一定的优势,若不施加主动控制难以较好地完成对目标车速的跟随.
4 结 语
本文设计了一种基于分层控制结构的AFS/ DYC/ASR集成控制系统.其中,决策层计算出横摆力矩并联合ASR分配给子系统.执行层控制驱动/制动力与前轮转角,以实现纵向车速、滑移率与车辆横摆稳定性的控制.
仿真结果表明,本文所设计的主动前轮转向、直接横摆力矩与驱动防滑的联合控制策略能够有效控制车辆的纵向速度与滑移率,提高车辆的操纵稳定性.即使车辆以较高速度在低附着系数路面上行驶,仍能保证其具有较好的稳定性能.此外,该控制策略能够有效降低轮毂电机的输出扭矩,在经济性方面有着良好的表现.
[1] 郑水波,韩正之,唐厚君. 汽车稳定性控制[J]. 自动化博览,2005(4):27-29.
Zheng Shuibo,Han Zhengzhi,Tang Houjun. Vehicle stability control[J]. Automation Panorama,2005(4):27-29(in Chinese).
[2] 李 亮,贾 钢,宋 健,等. 汽车动力学稳定性控制研究进展[J]. 机械工程学报,2013,49(24):95-107.
Li Liang,Jia Gang,Song Jian,et al. Progress on vehicle dynamics stability control system[J]. Journal of Mechanical Engineering,2013,49(24):95-107(in Chinese).
[3] Güvenc B A,Acarman T,Guvenc L. Coordination of steering and individual wheel braking actuated vehicle yaw stability control[C]//Intelligent Vehicles Symposium. Columbus,USA,2003:288-293.
[4] 黄 龙,王文格,贺志颖,等. 电动汽车直接横摆力矩与驱动防滑集成控制策略研究[J]. 汽车技术,2019(6):41-46.
Huang Long,Wang Wenge,He Zhiying,et al. Re-search on DYC/ASR integrated control strategy of electric vehicle[J]. Automobile Technology,2019(6):41-46(in Chinese).
[5] Wang Rongrong,Hu Chuan,Wang Zejiang,et al. Integrated optimal dynamics control of 4WS4WD electric ground vehicles with tire-road frictional coefficient estimation[J]. Mechanical Systems and Signal Processing,2015,60/61(8):724-741.
[6] Yang Jin,Lu Liu,Ding Shihong,et al. Active front steering controller design for electric vehicle system by using disturbance observer method[C]// Proceedings of the 36th China Control Conference. Dalian,China,2017:1180-1185.
[7] Mousavinejad E,Han Q L,Yang F,et al. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control[J]. Vehicle System Dynamics,2017,55(2):268-294.
[8] Pacejka H B,Besselink I J M. Magic formula tyre model with transient properties[J]. Vehicle System Dynamics,1997,27(Suppl):234-249.
[9] Hu J,Hu Z,Fu C,et al. Integrated control of AFS and DYC for in-wheel-motor electric vehicles based on operation region division[J]. International Journal of Vehicle Design,2019,79(4):221-226.
[10] 朱敬娜. 基于转矩分配的分布式驱动电动汽车横摆稳定性控制策略研究[D]. 北京:北京理工大学,2017.
Zhu Jingna. Research on Yaw Stability Control Strategy of Distributed Drive Electric Vehicle Based on Torque Assignment[D]. Beijing:Beijing Institute of Technology,2017(in Chinese).
[11] 林 程,彭春雷,曹万科. 独立驱动电动汽车稳定性的滑模变结构控制[J]. 汽车工程,2015,37(2):132-138.
Lin Cheng,Peng Chunlei,Cao Wanke. Sliding mode variable structure control for the stability of independent drive electric vehicle[J]. Automotive Engineering,2015,37(2):132-138(in Chinese).
[12] 郭建华. 双轴汽车电子稳定性协调控制系统研究[D]. 长春:吉林大学,2008.
Guo Jianhua. Research on Electronic Stability Coordinated Control System for Double-Axle Vehicles[D]. Changchun:Jilin University,2008(in Chinese).
[13] Wang Q N,Zhai L,Wang J. Study on acceleration slip regulation torque distribution control strategy for four in-wheel-motors electric vehicle steering[C]// Proceedings of the 25th China Conference on Control and Decision Making. Guiyang,China,2013:3833-3838.
[14] Sierra C,Tseng E,Jain A,et al. Cornering stiffness estimation based on vehicle lateral dynamics[J]. Vehicle System Dynamics,2006,44(Suppl1):24-38.
Research on the Active Safety Control of the 4WID Vehicle
Bi Fengrong1, 2,Sun Haoxuan1,Zhang Lipeng2,Liu Lehai1,Wang Jie1
(1. State Key Laboratory of Engines,Tianjin University,Tianjin 300072,China;2. Tianjin Internal Combustion Engine Research Institute,Tianjin 300072,China)
Relative to the active safety control of 4WID vehicle,a control system is developed based on the integration of active front steering,direct yaw-moment control,and acceleration slip regulation. The control system adopts a hierarchical control structure. The decision layer designs a cooperative controller of yaw rate and sideslip angle based on the sliding mode control theory and vehicle phase plane stability criterion,and it calculates the corrective yaw-moment. Besides,a fuzzy PI controller is designed based on slip ratio threshold to allocate the additional yaw-moment of the active front steering and direct yaw-moment control modules,finally obtaining additional yaw-moment and additional steering angle. The execution layer takes control of the driving/braking torques and steering angle to track the velocity and control slip ratio and vehicle stability. Simulation results show that under the limiting condition of high speed and low-adhesion-coefficient road,an integrated control strategy maintains vehicle stability and provides comprehensive performance superior to single control.
active front steering;direct yaw-moment control;acceleration slip regulation;sliding mode control;vehicle stability control
10.11784/tdxbz202008020
U270.1
A
0493-2137(2022)02-0158-08
2020-08-10;
2020-12-31.
毕凤荣(1965— ),男,博士,教授.Email:m_bigm@tju.edu.cn
毕凤荣,fr_bi@tju.edu.cn.
典型运行工况两轮摩托车操纵稳定性试验研究资助项目.
the Program of Experimental Study on Handling Stability of Two-Wheeled Motorcycle in Typical Operation Cases.
(责任编辑:王晓燕)
