基于路面激励的汽车操纵稳定性影响研究
2022-10-30赵婉婉杨明吴心杰
赵婉婉,杨明,吴心杰
(200093 上海市 上海理工大学 机械工程学院)
0 引言
如今国内大多数汽车企业都缺少自主评价悬架性能的能力,而传统的悬架性能研究主要是以准静态 K&C 试验为基础,试验的外部载荷是缓慢加载的,没有考虑到悬架系统在随机载荷作用下的动态特性,悬架系统关于路面激励的动态性能研究成为当前热点问题。因此,本文通过某企业动态 K&C 试验台与动力学仿真分析相结合,系统研究悬架在随机路面激励下的动态特性对汽车操纵稳定性能产生的影响[1]。
1 路面激励模型的建立
1.1 路面不平度
路面的不平度是指路面的高度沿其走向方向的变化,是一个随机过程,即随机路面,路面不平会引起车辆行驶产生振动[2]。模拟路面不平度的方法有很多,目前普遍应用较多的是基于滤波白噪声的方法,该方法不仅计算精度高,而且计算过程相对简单[3-4]。因此,本文采用滤波白噪声法建立随机路面激励模型。
1.2 基于路面不平度的随机路面模型
路面(不平度的)空间功率谱密度Gq(n)的拟合表达

式中:Gq(n0)——路面不平度系数;n——空间频率;n0——参考空间频率;W——频率指数。
路面不平度可分为8 个等级,考虑实际行驶路面中B,C,D 三个等级的路面应用最为普遍,本文重点对B,C,D 三个等级的路面不平度进行重构。路面不平度是汽车振动系统的输入,其时间功率谱密度除了与空间功率谱密度有关,还与车速u(m/s)有关。路面输入的时间频率f 如式(2)。

由式(2)可得时间功率谱密度:

经过推导,引入下截止频率的滤波白噪声路面不平度时域模型

式中:n1——路面不平度下截止空间频率,取0.01 m-1,即对应最大路面波长A=100 m。
基于建立的数学模型借助MATLAB/Simulink搭建随机路面时域仿真模型如图1 所示。在路面时域模型仿真中,限带白噪声的噪声功率谱密度应设置为0.5,采样时间设置为1/(10u)。

图1 随机路面激励Simulink 时域模型Fig.1 Road excitation model based on Simulink
对上述随机路面激励模型进行仿真,即可得到不同等级不同车速下的随机路面激励。其中,不同速度下的C 级路面激励如图2 所示。

图2 随机路面激励Simulink 时域模型Fig.2 Simulink time domain model of random road surface excitation
1.3 路面模型验证
为确保上述随机路面激励模型的准确性,对B,C,D 三个等级路面输入激励进行高度历程统计。C 级路面的统计结果如表1 所示。表1中,Max 表示路面激励位移的最大值,Min 表示路面激励位移的最小值,Avg 表示路面激励位移的平均值,RMS 表示路面激励位移的均方根值,Range 表示路面激励位移的变程,L 表示左轮,R表式右轮。
根据表1 可知,在不同车速下,同样行驶400 m 的距离,路面激励位移的最大值、最小值、均值、均方根值以及变程均相同,即相同的行驶距离,不同车速下的路面高度历程却相同。显然,这是符合真实情况的,该路面激励模型具有一定精度。
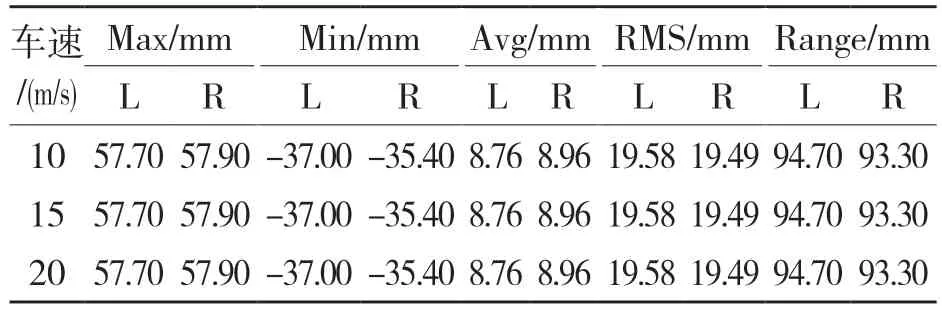
表1 不同车速下的C 级路面高度历程统计表Tab.1 Statistics of grade C road height history at different speeds
2 麦弗逊悬架动态模型的建立
2.1 悬架系统拓扑结构研究
悬架作为车轮和承载系统之间的弹性连接装置,不仅可以传递车轮与各承载部件间的力和力矩,而且能够缓解因路面不平度造成的振动与冲击[5]。为确保后续建模的准确性,本文首先对所研究的某A 级轿车的麦弗逊前悬架进行结构分析,可得该悬架系统的拓扑结构如图3 所示。
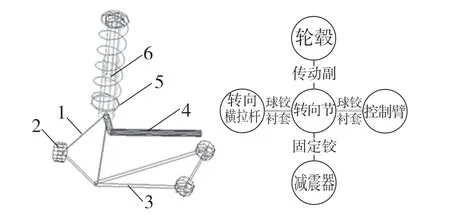
图3 麦弗逊前悬架结构拓扑图Fig.3 Topology of McPherson front suspension structure
2.2 悬架多体动力学模型的搭建
利用ADAMS/Car 软件搭建麦弗逊前悬架[6-7]。此时建立的麦弗逊前悬架模型实际为静态非线性模型,考虑到汽车实际行驶过程中橡胶衬套的刚度和阻尼属性不断变化,表现出显著的非线性特性。而在ADAMS/Car 内置的橡胶衬套模板库中,默认衬套是具有线性刚度的弹性元件,不能反映极限工况下悬架进入非线性区的力学特性,研究结果不够精确。
为了体现橡胶衬套的非线性特性,对橡胶衬套模型进行了二次开发,利用GFOSUB 用户子程序将原有的悬架衬套模型的替换为高阶分数导数三单元并联衬套模型[8],进而实现了悬架模型的动态化,改进后的麦弗逊前悬架动态模型如图4所示。
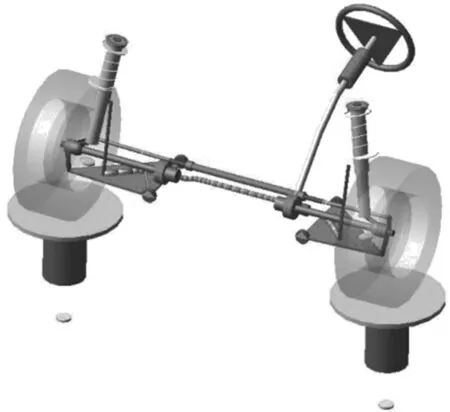
图4 麦弗逊前悬架动态模型Fig.4 Dynamic model of McPherson front suspension
2.3 模型验证
借助ADAMS/Car 对麦弗逊前悬架进行动态侧向力扫频仿真试验,并将仿真结果与相对应的动态 K&C 台架试验结果进行对比,通过统计仿真结果与台架试验结果的均值和变程,对模型精度进行验证,仿真及试验结果对比如表2 所示。
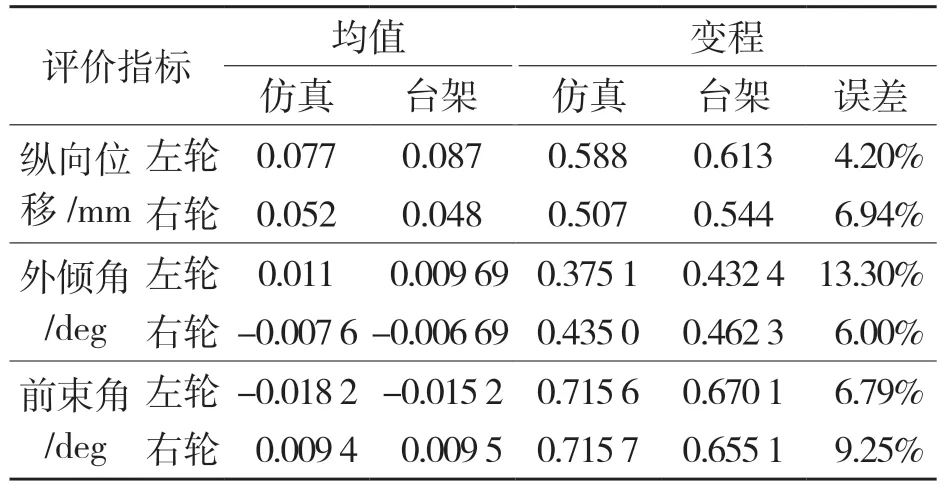
表2 仿真及试验结果对比Tab.2 Comparison of simulation and test results
计算得出,以上3 个评价指标的变程误差[9]均在15%以下,可以认为仿真试验结果与台架试验结果比较吻合,因此所建立的悬架模型可靠。
3 悬架系统动态响应
3.1 不同车速下的悬架动态响应
将试验车辆以及动态模型按半载的装载状态进行配重,选用B,C,D 三个等级路面,分别采用5,10,15,20,25,30 m/s 的车速对悬架系统进行动态台架试验与仿真分析。轮胎动载荷的数据来源于动态K&C 台架试验,悬架动态K&C 试验台如图5 所示。

图5 悬架动态K&C 试验台Fig.5 Suspension dynamic K&C test bench
因动态K&C试验台本身会产生一定的噪声,台架试验所测得的信号可能存在毛刺,故对所测得的试验数据进行滤波处理,滤波后的不同车速下C 级路面车轮轮胎动载荷随时间的变化历程如图6(a)—图6(g)所示(均为左轮)。
由图6(h)可观察到一定规律,不同车速下的车轮轮胎动载荷均呈正态分布。将车轮轮胎动载荷分布曲线进行对比,得出相同装载质量不同车速下C 级路面车轮轮胎动载荷随车速的变化规律,即随着车速的增加,左右两侧车轮轮胎动载荷变化范围越来越大,悬架垂向跳动也越来越剧烈。究其原因可发现,轮胎动载荷的最大值随着行驶车速的增大而增大,车轮为了克服静载重力产生远离地面的惯性力,即两侧轮胎的抓地力开始变小,悬架垂向跳动程度变大,车辆的操纵稳定性趋于恶化。

图6 不同车速下车轮轮胎动载荷变化规律图Fig.6 Dynamic load variation of tire at different speeds
3.2 不同路面下的悬架动态响应
将滤波后的轮胎动载荷的时域信号离散化处理,对离散后的左右车轮的轮胎动载荷幅值分布进行拟合,并对相同车速不同路面等级下的左右车轮的轮胎动载荷分布曲线进行对比,得到各路面等级下左右车轮轮胎动载荷随路面等级变化的规律,其中车速为20 m/s 时,左右车轮轮胎动载荷随路面等级变化的规律如图7 所示。

图7 车速20 m/s 时,左右车轮轮胎动载荷随路面等级变化规律Fig.7 Dynamic load variation of tires with road excitation at 20 m/s
由图7 可观察到一定规律,即左右两侧车轮轮胎动载荷随路面等级的变化趋势基本相同,并且随着路面状况的不断恶化,随着路面等级的不断增大,左右两侧车轮轮胎动载荷的变化范围不断增大,轮胎动载均值越来越大,悬架垂向跳动也越来越剧烈。究其原因可发现,轮胎动载荷的最大值随着路面等级的增大而增大,即左右车轮产生了远离地面的惯性力,两侧轮胎抓地力开始减小,悬架垂向跳动程度变大,车辆的操纵稳定性趋于恶化。
4 结论
依据GB 7031-1986《车辆振动输入 路面平度表示方法》,基于滤波白噪声理论借助MATLAB,nCode 等软件编制了随机路面载荷谱,对上述随机路面激励模型进行仿真,得到了不同等级不同车速下的随机路面激励,本文重点对B,C,D 三个等级的路面不平度进行重构,并展示以不同速度下的C 级路面激励谱。
研究发现,随着行驶车速的增加,轮胎动载荷最大值不断增大,车轮产生了远离地面的惯性力以克服静载重力,即轮胎的抓地力开始变小,车辆的操纵稳定性开始恶化。为了改善汽车的操纵稳定性,驾驶员应该保证车速变化范围较小,行驶过程中悬架垂向跳动在合理范围内;随着路面等级的增加,轮胎动载荷最大值不断增大,即左右车轮产生了远离地面的惯性力,两侧轮胎抓地力开始减小,车辆的操纵稳定性开始恶化。为了改善汽车的操纵稳定性,应该保证路面不平度变化较小,行驶过程中悬架垂向跳动在合理范围内。
动态特性研究是研发悬架系统的关键,所建立的动态悬架系统模型可以准确模拟汽车垂向跳动,体现悬架系统轮胎动载荷与行驶车速和路面等级相关的变化特性,为汽车底盘性能的研究与改进提供了参考。
