基于点云技术三维模型重建的区域太阳能潜力探究
2022-10-28果煜程GUOYucheng石雨辰SHIYuchenSHIJie
■ 果煜程 GUO Yucheng 石雨辰 SHI Yuchen 史 洁 SHI Jie
0 引言
2020 年9 月,中国在第75 届联合国大会上提出2030 年实现碳达峰、2060 年实现碳中和的“双碳”战略目标。为实现这一目标,建筑需要成为能源系统中的产消者(Prosumer)。一方面,要降低建筑能耗实现绿色节能;另一方面,要实现可再生能源的规模化应用,提升可再生能源的渗透率做到“开源”。在这样的背景下,可再生能源的重要性日益凸显。太阳能作为一种被广泛使用的可再生资源,随着光伏发电技术的日臻成熟与建筑光伏一体化(BIPV)技术的发展,在城市中具有更广泛的应用前景。预计到2025 年,城镇建筑可再生能源替代率将达到8%,新建公共建筑、新建厂房的屋顶光伏覆盖率力争达到50%[1]。除了确保新建建筑的设计符合相关规范并保证可再生能源的利用率外,还要关注数目众多的既有建筑能否通过改造达到较为可观的可再生能源利用率。因此,对可再生能源潜力进行评估,继而为新建建筑的建设和既有建筑的改造提供指导性意见,是具有现实意义的。
1 太阳能潜力评估
针对太阳能潜力的评估,国内外学者已经进行了大量研究,重点集中在太阳能潜力计算方法的优化和数字化模型的建立两个方面。
计算太阳能潜力研究目前主要可分为3 个层级:物理潜力、地理潜力与技术潜力[2]。其中,物理潜力是指在一定时间内某地区得到的太阳辐照量,其核心参数是固定的,包括日照时长与太阳辐照度估计两方面。日照时长用于描述在一个时期内,建筑物表面受太阳光照射时间的长短;太阳辐照度则用于反映建筑物表面接收到太阳能的多少。可以说,日照时长是太阳辐射量估计的前提[3]。对于物理潜力,基于积累的大量气象数据,目前已经出现了Solar Map 等直观反映太阳能辐照量的工具[4]。在建筑领域,对于太阳能潜力的预测,由于建筑物之间存在相互遮挡关系,则更注重对地理潜力的计算,目前常用的计算引擎有Radiance 和Daysim,数字化的建筑物模型是其需要的输入参数。
对于数字化模型的建立方法,目前已经有多种较为成熟的技术手段,如小型无人机倾斜摄影、激光雷达扫描、导入现有的城市三维数据等。根据分析对象的不同,还可以分为立体模型和屋面模型。在立体模型建立方面,余烨等[5]采取基于灭点的单像标定方法,对合肥工业大学图书馆进行各边长的比例测算,实现了对单体建筑的快速还原,但单像标定的误差大,且得不到建筑物的实际尺寸;刘春等[6]使用小型单相机旋翼无人机对异形建筑进行点云提取,对单个异形建筑的轮廓和纹理细节都实现了较好的还原,但其生成的是网格化模型,不利于后续模拟计算;梁福逊等[3]利用地面车载激光雷达和无人机航拍获取多源点云数据,建立了可用于日照分析和太阳能潜力分析的单体建筑物模型,但该方法为建立一栋建筑需要提取上百万个特征点信息,且作为立面信息采集设备的地面激光雷达单次采集范围小、使用专业性强、设备价格高;Anh Vu Vo 等[7]研究了一种利用机载激光雷达获取点云数据,使用分布式计算方法获得大规模精细化的建筑物数字化模型,并利用该方法对爱尔兰都柏林进行太阳能潜力计算,此方法所使用的设备同样存在价格高、专业性强的问题、采集的数据集巨大等问题,难以通过常规的计算手段实现还原,必须采取分布式的计算方法;此外,该研究对象尺度已经上升到了城市,对待还原对象的尺度估计是很重要的,近年来国内外规模化应用可再生能源的成功案例,基本是采取生态街区的形式。因此,在中观尺度上,也就是面积约为1 km2的建筑模型研究更为贴合实际。在屋面模型方面,黄昭键[8]以卫星图像作为输入,采取深度学习手段,对武汉市屋面太阳能利用潜力进行分析计算,但仅输入了平面上的高清卫星图像,采用从典型街区计算出的屋面遮挡系数,而对于建筑高度的影响没有进行深入研究;Steven Jige Quan 等[9]利用GIS 数据对曼哈顿城区建筑屋顶的太阳能潜力进行模拟分析,虽考虑了建筑物高度信息,但缺乏实际的调查信息,难以反映实时变化。
针对上述数字化建模的问题和不足,本文拟提出一种适合于中观尺度的方法,利用小型旋翼无人机进行倾斜摄影,采取SIFT 特征匹配算法提取点云数据,并依托可视化选点界面,以较少量的特征点坐标快速建立建筑区域三维模型;并在此基础上,使用Ladybug 中,对还原对象进行太阳能潜力分析。
2 点云提取技术路线
本研究利用航空影像提取点云数据,实现三维重建的技术路线(图1)。首先,通过小型旋翼无人机搭载相机对待重建建筑物进行拍摄,获得多张待重建对象不同视角下的图像数据;并对不同角度拍摄能得图片中的相同特征点进行提取与匹配,实现运动恢复结构(Structure from Motion,简称SfM),得到相机位姿信息后,对建筑进行稀疏重建,获取得到建筑物的稀疏点云模型。然后,对获取得到的稀疏点云模型进行稠密重建(Multi-View Stereo,简称MVS),得到建筑的稠密点云模型。最后,筛选点云模型中的关键点,对模型实现简化,得到最终的三维模型。
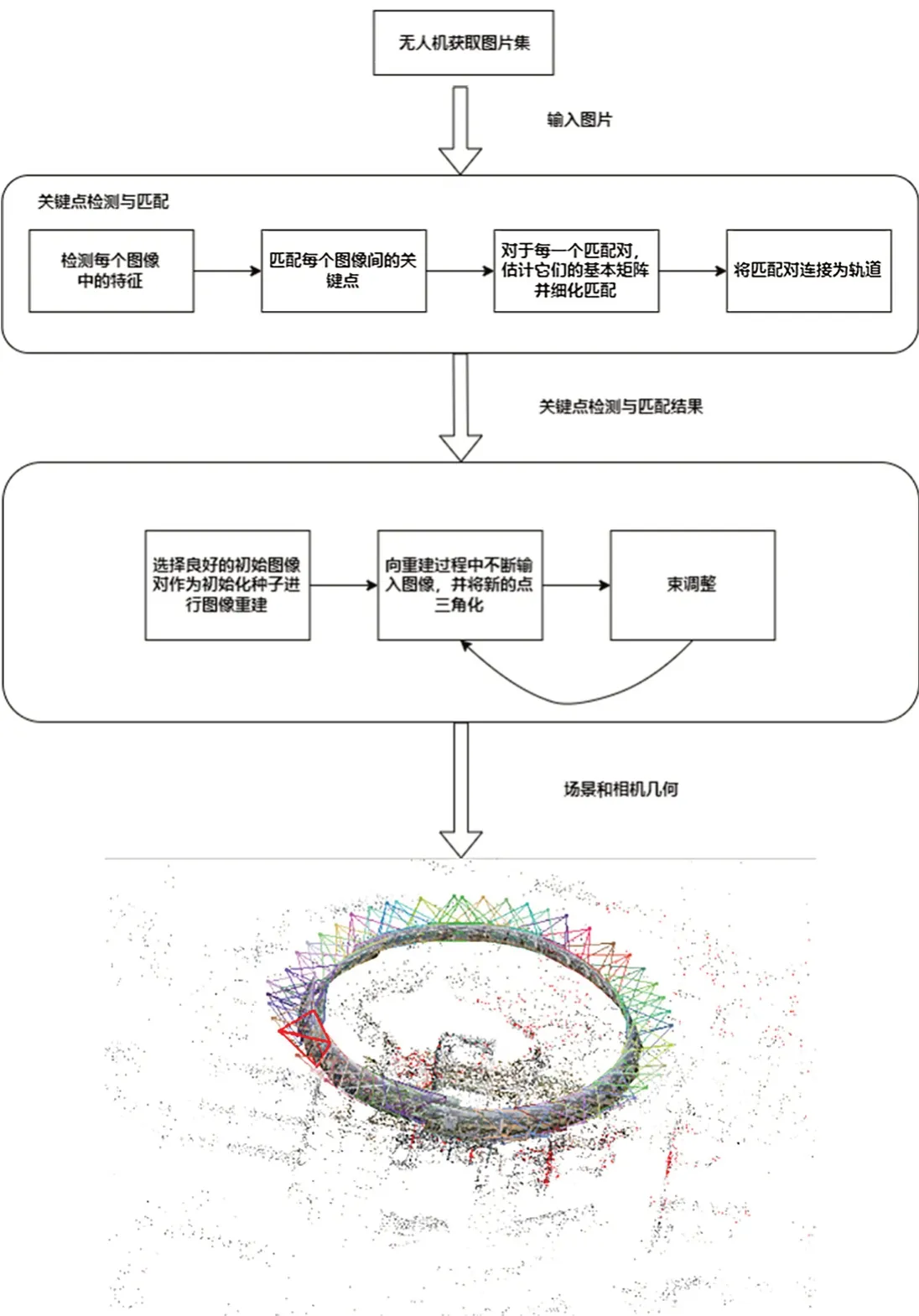
图1 无人机SfM 场景重建技术路线
2.1 多视角图像特征点提取
从多视角图像中提取特征点的方法有很多,如Moravec 角点检测算子法[10]、Harris 角点检测算子法[11]、FAST 角点检测算子法[12]等。本文利用SIFT 算子[13]提取图像的局部特征(如建筑不同材质的变化、两立面的交点等),在尺度空间中寻找极值点,提取其位置、尺度和方向信息。SIFT 算子是一种对图片进行两两匹配提取关键点的计算方法,其具有以下优点:①稳定性高,对旋转、缩放和亮度变化保持不变,对观看角度的变化、噪声等也有一定的稳定性;② 准确性高、信息量大,适用于海量特征数据的快速、准确匹配;③有大量的特征向量,即通过少量的对象,就可以得到大量的SIFT 特征向量;④具有可伸缩性,即对处理对象的适应性好。此外,该方法提取的向量还可以很容易地与其他形式的特征向量组合。
SIFT 特征点检测流程(图2)为:①生成高斯差分(DOG)金字塔,进行尺度空间构建;②将每一个像素点与它所有的相邻点比较,进行空间极值点检测;③为了避免噪声与边缘敏感问题,要筛选去除不稳定和错误的极值点,对稳定关键点进行精确定位;④对于未定后的关键点进行方向信息分配,并采用一种数学方式定义关键点及其周围有贡献的邻域点。⑤通过计算特征点之间的欧氏距离来进行特征点的匹配。图3 为同济大学图书馆SIFT 特征点检测匹配的效果,对两个视角下的相同特征点使用连线进行相连,并不断重复该SIFT匹配流程,就可以实现对多视角下图像数据的特征点提取。
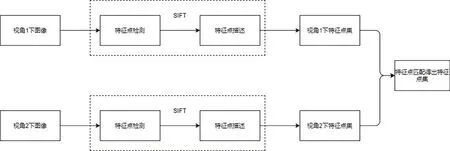
图2 SIFT 特征点检测流程
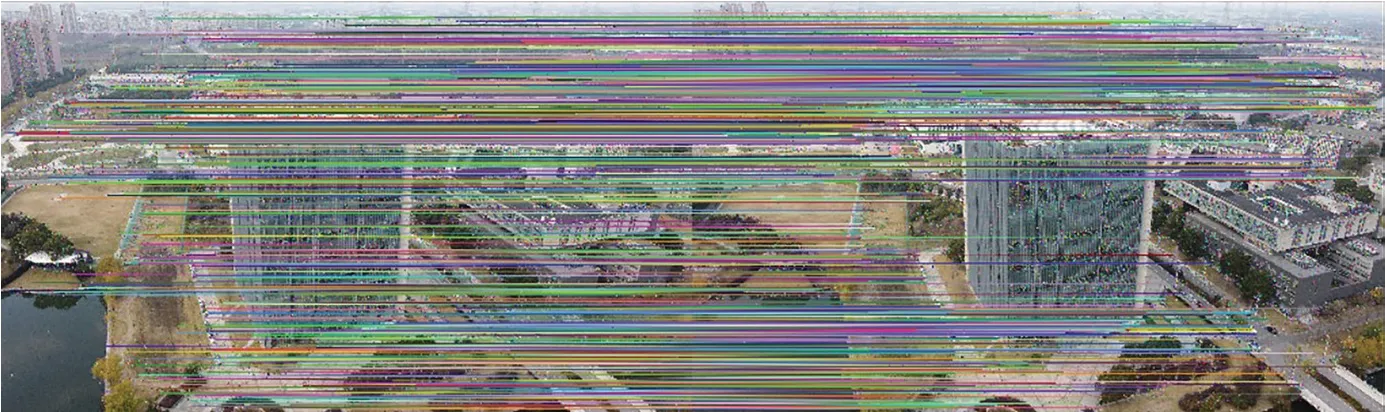
图3 同济大学图书馆SIFT 特征点匹配效果图
2.2 运动恢复结构的稀疏重建
运动恢复结构(SfM)是一个估计相机参数及三维点位置的问题。SfM 方法可以分为增量式(incremental)、全局式(global)、混合式(hybrid)三种。增量式的优点在于其鲁棒性好,能够准确地还原场景结构,但效率不足;全局式的优点在于其还原效率高,但是仅通过一次捆绑调整,准确度低且鲁棒性差。两者性能对比见表1。
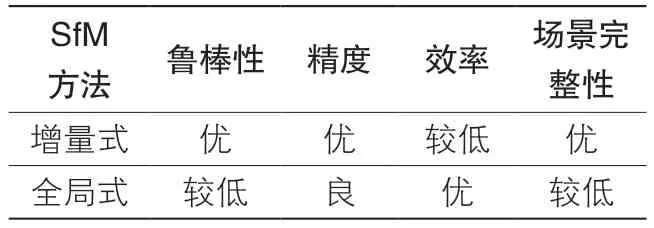
表1 不同SfM 方法性能对比
由于SfM 方法容易陷入求解局部极小值的问题中,难以做到通过一次测量即可采用全局式SfM 对摄影机和轨迹的所有参数进行估计,因此,这里采用增量式SfM 方法来恢复场景结构。对于一般的SfM 方法[14],其实现重建的流程可以总结为3 个步骤:①在每个图像中检测特征点;②在图像之间匹配特征点;③运行迭代的、鲁棒的SfM 过程,以恢复相机参数。
本文使用VisualSFM[15]中的SfM 方法对无人机拍摄的场景图片进行运算。首先,用SIFT[16]特征提取算法提取特征点,并计算其对应的描述子;然后,应用ANN(approximate nearest neighbor)[17]方法进行特征点匹配,低于某个匹配数阈值的匹配对将会被移除。对于保留下来的匹配对,使用RANSAC(Random Sample Consensus)[18]方法对其基本矩阵进行估计;并在每次RANSAC 迭代期间,不断使用八点法[18]对候选基本矩阵进行估计,并将判定为外点的匹配作为错误匹配而移除。同时,将满足以上几何约束的匹配对合并为轨迹。对于束调整,VisualSFM使用GPU 版本的multicore bundle adjustment[19]来最小化重投影误差,将束调整的时间复杂度减少到O(n)。如此便可获得无人机拍摄场景的稀疏点云模型。
2.3 MVS 稠密重建
SfM 利用特征匹配获得的点进行重建,但由于特征匹配点的密集度不够高,难以还原重建对象的详细轮廓和全貌。因此,当获得稀疏点云模型后,需要对其进行MVS 重建,以提高点云模型的细节与精度。图4、5展示了稀疏点云和稠密点云的差别,可以看出,稠密点云已经对建筑物及其周边进行了细致的还原。

图4 稀疏点云模型

图5 稠密点云模型
3 实际建筑物模型重建及其精确度校验
在太阳能利用领域,建筑物可分成两种不同的类型:一种是地标式的大体量公共建筑;另一种则是密集的同类型建筑物,如住宅、宿舍等。在《2030 年前碳达峰行动方案》中,这两类建筑的可再生能源利用目标是不同的,应当选择不同的重建策略:公共建筑的占地面积较大,周围遮挡不多,模型的精细程度应适当提升;对于密集的建筑物,则更关注其空间关系,从而分析其肌理和相互遮挡关系。本文分别以同济大学嘉定校区的图书馆和学生公寓2~6 #楼为例,进行两种不同类型建筑的重建,并校验其建模质量。本次研究所使用的航拍设备是大疆MINI2 无人机,搭载1 200 万像素相机,后续处理使用的计算机CPU 为AMD Ryzen 7 4800H,显卡为NVIDIA GeForce RTX 2060。
3.1 大体量单体建筑模型建立及精度校核
采取前文所述的方法,获取同济大学嘉定校区图书馆点云文件。在可视化选取界面中,选取建模所需的关键点,如屋面轮廓等。由于该建筑垂直于地面,只需要提取屋面特征角点确定其外轮廓,再选取若干个地面特征点确定地面与屋面的高差即可。
为实现较为详细的建筑物重建,对该区域共输入54 张图片,进行稀疏重建耗时61 s,进行稠密重建耗时519 s,总计耗时580 s。
在点云模型中选取60 个点来描绘屋面轮廓(图6);同时,选取地面上8 个点,以求平均值的方式求取地面高度坐标。将各点坐标数据输入到Rhino 软件中,建立模型(图7)。同拍摄的图书馆实际照片相比(图8),模型较好地反映了立面的凹凸情况,但因手工取点带来的精度误差,对于屋面上的设备、绿植及女儿墙等小尺度结构,难以实现细节上的还原。

图6 嘉定校区图书馆选点
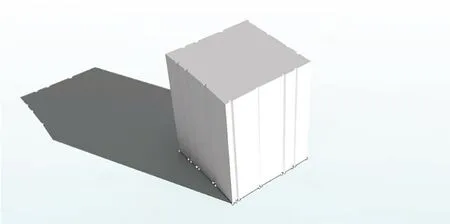
图7 Rhino 中建立的建筑物模型

图8 同济大学嘉定校区图书馆实拍
得出的模型尺寸是一个无量纲长度,同建筑物真实尺寸相差一个比例度。为了消除该比例度,这里提出两种解决方案。一是对航拍影像做单应性变换,以求解建筑物一个平面的尺寸。单应性变换就是求解从一个平面到另一个平面上的映射关系,但是该方法需要知道该平面上一个区域的大小(如清晰可见的门窗或者招牌等),对易于完成测量且能清晰识别出一个已知区域的建筑物,可以采用该方案求解。二是利用ArcMap 中的地图信息,采用正射投影变换导出CAD 图形(图9),从而获取建筑物的长宽信息,进而消除比例度。由于图书馆整体体量较大,可借助ArcMap 中的地图信息,通过长宽信息还原模型的实际尺寸。此外,利用ArcMap 中的信息也可以确定建筑物的实际朝向,这在太阳能潜力估算中是十分重要的。
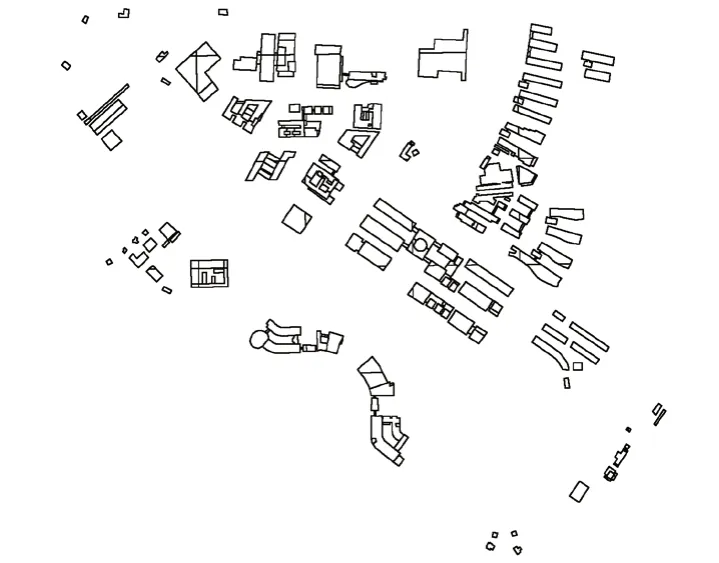
图9 ArcMap 中导出后的同济大学嘉定校区平面图
采用长度比较的方法对模型精度进行校验。在ArcMap 中,对嘉定校区图书馆各边长度进行测量,并与模型4 个角点之间的距离进行比较(表2)。

表2 模型精度校验
以南侧长度为基准,进行等比例放大,得到可用于太阳能分析的建筑物模型(高度66.85 m),同嘉定校区图书馆公开的标高数据65.1 m 进行比较,得出高程误差为2.69%。
由此可以看出,无论是在平面上还是在高度上,通过该方法建立的模型精度都在5%以内。参照建筑物模型的LOD(Level of Detail)理论,数字化的建筑物模型可以分为4 个等级,即:LOD1、LOD2、LOD3、LOD4(表3)。

表3 三维模型精细等级[20]
对比上文建立的模型,将建筑物简化为体块,但仍能一定程度上反应其凹凸,从而提升计算速度,降低对计算机性能的需求。该方法建立出的模型高于LOD1,但未达到LOD2 级别。根据国内学者的相关定义,该方法建立的模型属于2.5 维几何模型,无纹理,主体结构主要基于直线、平行和对称等特征进行表达,可以用于各种空间分析[21]。
3.2 多栋建筑群体模型建立及精度校核
区域尺度上的建筑建模流程与上文单体建筑物模型建模相同,本次建模选定的对象为同济大学嘉定校区学生公寓友园2~6 #楼的5 栋白色建筑物(图10),该区域面积约为0.02 km2。考虑到群体建筑建模更注重于其相互位置关系而非单个建筑本身,在减少输入的图像信息,还原其高度信息和屋面轮廓信息,忽略其立面细节后,共输入36 张图片信息,进行稀疏重建耗时46 s,进行稠密重建耗时286 s,总计耗时332 s。对屋面手动提取筛选特征点(图11),并在建模软件中利用以上点坐标建立建筑物模型(图12);再利用ArcMap 导出数据,对模型的长宽进行校核(表4)。

图10 嘉定校区2~6 #宿舍楼

图11 宿舍楼区域选点
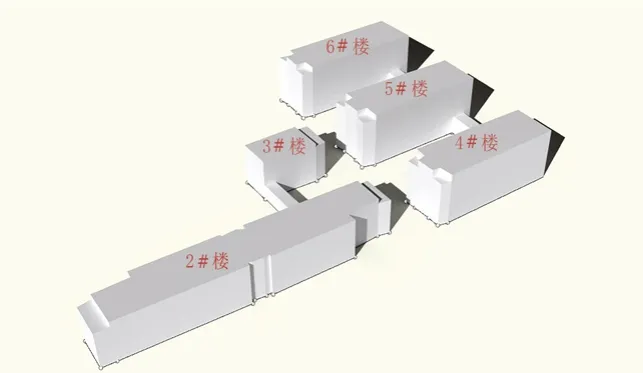
图12 宿舍楼区域建筑模型
在表4 可以看出,长度较短的立面,还原后的误差明显变大,这是由输入图片信息较少及手动选点带来的误差导致的;当实际长度达到10 m左右时,建模精度较好。对于建筑立面上凹凸变化关系的还原,会显著加大工作量,导致模型建立和模拟计算的时间更长;且由于建筑立面上的凹凸往往是出挑结构,一般不超过半个柱间距,尺度较小,重建的精确性也不高。

表4 各立面长度比例度对照
对于一般的居住类建筑,往往是由多个相同单元重复组合而成,只要研究一个单元上的阳台凹凸遮挡带来的太阳能潜力折减,就可以用一个平面来代替其实际立面。因此,可以相对忽略建筑物模型中立面上的细节。
以全部数据求比例度平均值,称为平均值1;以舍去2 个明显误差较大的数据求得平均值,称为平均值2。将求得的平均值和各边比例值绘制在折线图中(图13)。
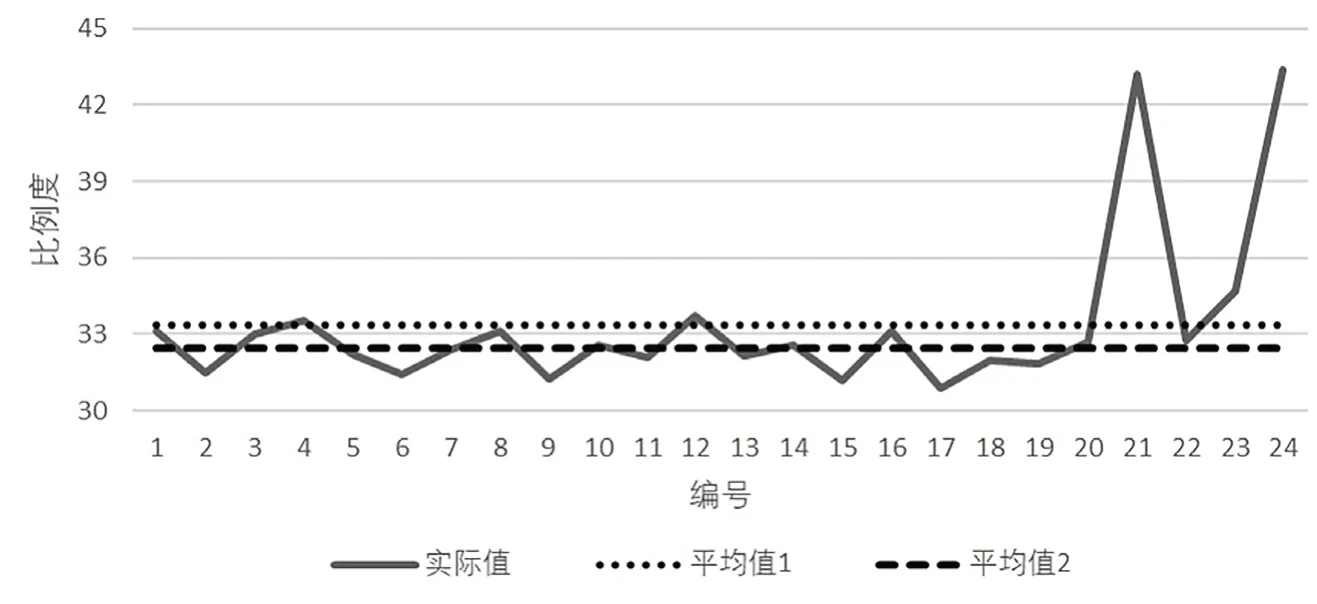
图13 区域建模各边长比例度
可以看出,舍去两组偏高点后得出的平均值更能反应其余边长的真实比例度,差值控制在±5%以内。因此,以平均值2 作为比例度基准,放大后得到该区域真实尺度下的三维模型,2~6 #楼高度分别为14.919、15.425、20.596、20.899、19.207 m,按层高3 m 进行估计,基本也符合5 层(2、3 #楼)、6 层(4~6 #楼)的高度。
3.3 中观尺度区域建模构建流程与思路
由此可见,以点云方法实现的大体量公共建筑物和区域群体建筑物的三维模型重建,在平面上和高程上都可以保证一定的建模精度。
以该方法实现中观尺度上,即1 km×1 km 水平上的区域重建,有两种思路:第一种是增广飞行路径,通过一次飞行拍摄待重建区域内所有待重建对象的影像信息并全部提取;第二种则是先对区域进行划分,再实现各区域的拼接。第一种方法虽然只需要进行一次拍摄,但是参照前文中的建模速度,建模范围增大到100 倍后,对计算机性能是重大考验,可能出现运行时间过长的问题;此外,我国目前允许的消费级无人机重量上限是249 g,势必限制其续航能力,难以一次性对待重建区域完成建模,对航拍设备的要求进一步提升。第二种方法对电脑性能要求不高,可采取更换电池的方式完成多次小范围的航拍飞行;在后续的拼接中,可以采用ArcMap 作为定位底图,也可以在划分区域的时候将一栋建筑同时归入到几个相邻的区域中,作为定位参照物,这是一种不需要改变现有技术设备改变的切实可行的重建方案。
4 区域太阳能潜力可视化预测分析
4.1 单体建筑太阳能潜力计算模型搭建
本次区域太阳能潜力预测分析采用Rhino 6 建模软件,分析平台及数据可视化输出则使用基于Rhino 平台插件Grasshopper 开发的环境分析插件Ladybug。Ladybug 本质上是Radiance 和Daysim 模拟引擎。将格式为.epw 的上海市CSWD 气象数据导入程序进行计算,可得到上海市全年累计天空模型,用于后续辐射模拟计算。
搭建日照时长分析电池组(图14)。根据ArcMap 中的数据,图书馆的南侧立面朝向是南偏西35°。将点云提取模型的4 个立面和顶面设定为分析对象,最终可以得到可视化日照时长分析结果(图15),其中:屋面的日照时长达4 384 h,而立面各处日照时长从188~3 034 h 不等。随后,对总日照辐射量进行分析,应用如图16 所示的电池组,得到日照辐射量分析结果(图17)。
图14 日照时长分析电池组
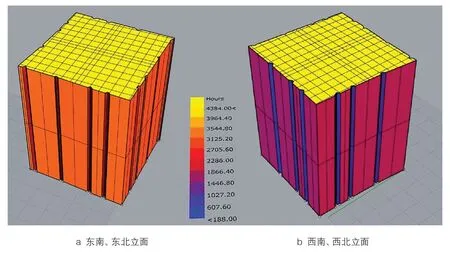
图15 日照时长分析结果
图16 日照辐射量分析电池组

图17 日照辐射量分析结果
对模拟结果进行分析,可以得到太阳辐射量数据(表5)。可以看出,太阳能物理潜力主要集中在屋顶区域,占到整个建筑物的太阳能潜力的30%以上,除南向立面外,其余各立面辐射量均较少。
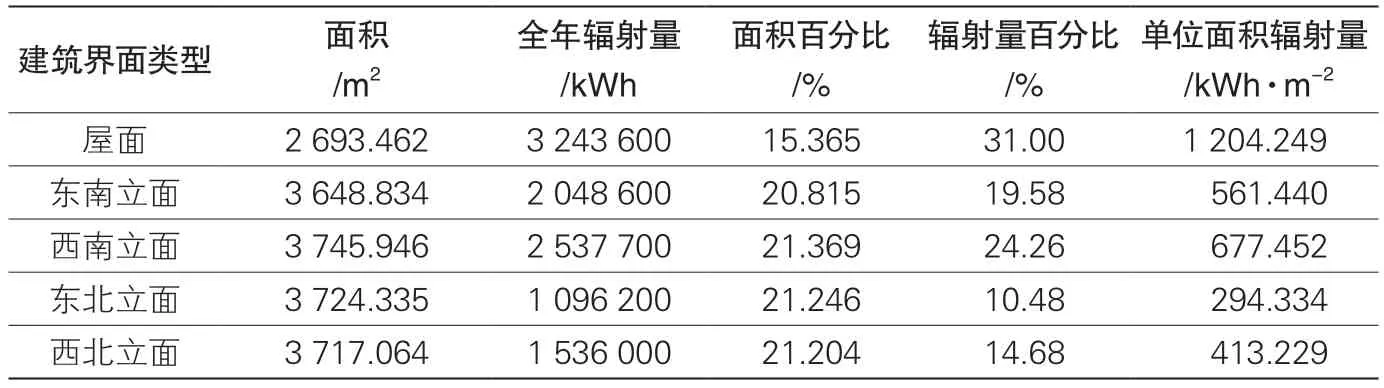
表5 建筑各界面太阳能潜力占比(太阳能辐射值)
丹麦学者Compagnon[21]提出以单位面积全年接收太阳能辐射总量为标准,界定适合采用的太阳能利用技术,具体数值见表6。可见对于单个遮挡较少的公共建筑,其屋面非常适合应用光伏系统;而立面应用光伏系统的经济性和合理性,则需要进一步结合实际才能确定。

表6 太阳能技术利用潜力阈值[22]
4.2 区域建筑太阳能潜力分析
该区域建筑整体朝向为南偏西61°,利用辐射量分析电池组进行太阳能地理潜力分析,可以明显看出:部分立面由于相互遮挡关系,导致太阳辐射量显著减少(图18),且高度较低的屋面辐射量低于高度较高的屋面辐射量。

图18 群体建筑太阳能分析结果
由表7 可以看出,区域建筑各界面太阳能潜力分布规律基本同大型单体建筑类似。但实际上,2~6#楼由于遮挡,与单体建筑存在一定区别。表8~12 分别列出了各楼(不包括连廊)的各界面太阳能潜力分布情况。
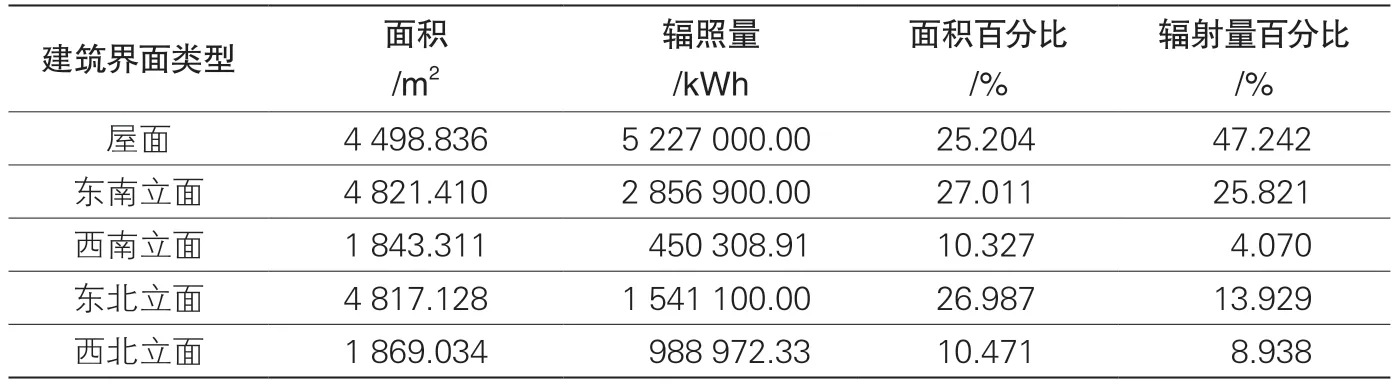
表7 区域各界面太阳能潜力占比(太阳能辐射值,包含连廊)
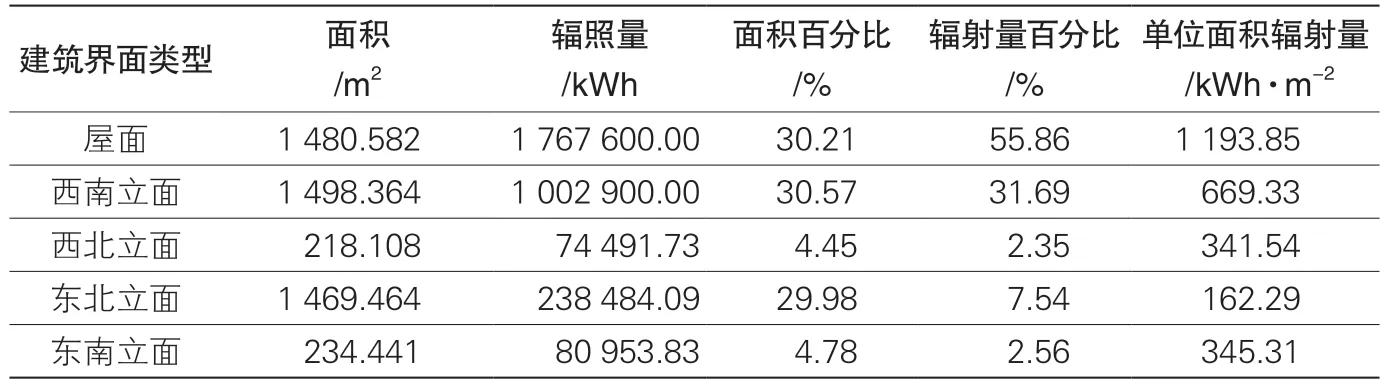
表8 2#楼各界面太阳能潜力占比(太阳能辐射值)
由此可以看出,由于相互遮挡的关系,对于区域内的单个建筑,其单位面积太阳能辐射潜力显著下降,而屋面的潜力则仍然保持在1 000 kWh/m2以上。可见对于区域建筑来说,其屋面是更具有利用前景的界面。
4.3 模拟结果分析
以上两次太阳能辐射量的模拟分析,均使用Intel(R) Core(TM) i5-10200H CPU。
对于单体建筑,当分析网格为1 m 时,运行时间约为13.3 s;当分析网格细化到0.5 m 时,运行时间约为140.6 s。对于区域建筑,当分析网格为1 m 时,运行时间约为12.5 s;当分析网格细化到0.5 m时,运行时间约为48.3 s。两次模拟时间均在可接受范围内。
5 总结与展望
当前,为了达成双碳目标,亟需实现可再生资源的规模化应用。太阳能作为一种长久以来被人类广泛应用与生产生活的可再生清洁能源,如何实现合理、智慧、科学的应用,是目前需要解决的问题,也是城市区域实现碳减排的重要途径。因此,需要在区域规划和改建阶段做好研究调查与预测评估工作。为了能够更高效地进行太阳能潜力分析和规划,就需要一种快速、廉价又具备一定精准度的模型建立方法。
本次研究利用消费级的小型旋翼无人机作为摄影设备,通过航拍影像对单体建筑和区域内多栋建筑进行重建,得到了精度在5%的建筑物模型,并使用该模型对太阳能潜力进行分析。如果事先对中观尺度面积在1 km2左右的区域进行分割,逐个获取数字化模型,再利用ArcMap 作为底图实现多个模型的拼接,就可以建立中观尺度用于太阳能潜力分析的街区数字模型。该方法相较于人工从图纸复原模型,既节省了时间,也可以避免由于改扩建导致图纸不能正确反映建筑的情况发生;相较于采用激光技术的建立方法,其处理速度快、投资成本低,降低了专业性门槛,更适合对区域进行快速数字化建模。

表9 3#楼各界面太阳能潜力占比(太阳能辐射值)

表10 4#楼各界面太阳能潜力占比(太阳能辐射值)
当然,该模型建立方法中仍需要一定程度的人工参与,具备一定的工作量;且选取的坐标点仍具有一定的不准确性,特别是当实际建筑上的两点间距离小于5 m 时,就会出现较大的误差。此外,如何实现三维坐标点的自动写入,以进一步提升建模的整体效率,也是后续继续研究中需要改进的方面。

表11 5#楼各界面太阳能潜力占比(太阳能辐射值)
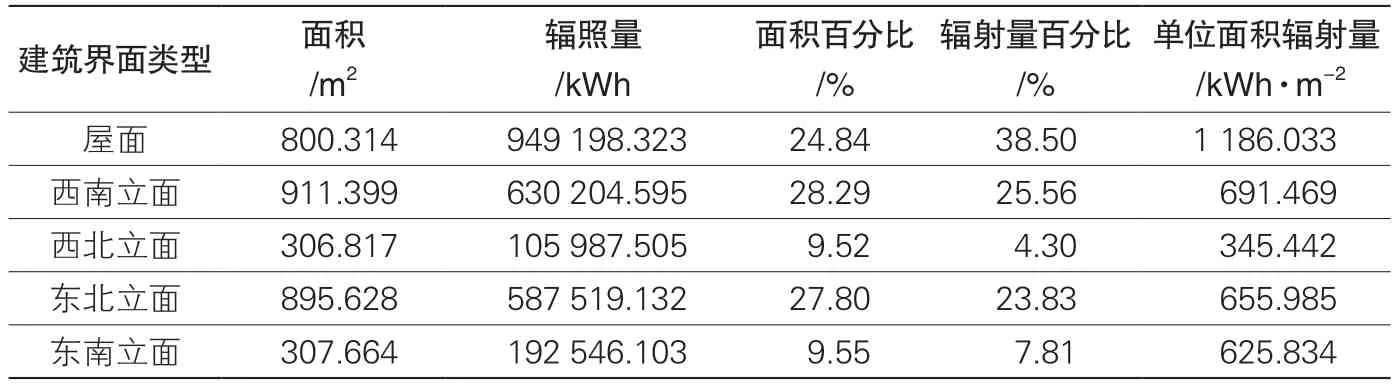
表12 6#楼各界面太阳能潜力占比(太阳能辐射值)
(参与本研究的人员还有:何逸帆、史薇愉、黄乾晋。)