无信号路口人车交通演化博弈分析
2022-10-24代亚运林晓娟
王 璐,代亚运,陈 旸,林晓娟
(安徽工业大学管理科学与工程学院,安徽 马鞍山 243032)
1 引 言
城市道路上机动车、行人、非机动车间的干扰与冲突是引发众多交通问题的重要原因。无信号路口是城市道路路口最普遍的类型之一,我国最新交通数据统计表明在目前的各类交通事故中,由机动车造成的交通事故比例达到90以上,其中28%的交通事故发生在无信号路口。
在行人过街行为的研究方面,李春成根据行人的心理行为特征把过街行人分成稳定型、半稳定性型、不稳定型、反常规型和自我认可型共5种类型,并对不同类型的行人过人行横道的心理进行了对比分析;景超分析了行人过街的静止空间、运动空间和心理空间,解释了影响行人过街时的从众行为、溢出行为和截短行为的原因。在行人过街交通流特性方面,李建新研究了混合交通条件下非机动车对交通流的影响,并针对信号交叉口处的通行能力建立计算模型;黄文忠根据无信号控制人行横道处行人和机动车到达规律研究,得到计算无控制人行横道处行人和机动车延误的数学模型,并给出了过街行人到达规律及其参数的计算方法;杨晓光通过对机动车流量、行人流量、车道数、非机动车流量数据的分析整理,运用回归方法建立了相应的数学模型。
2 人车冲突演化博弈模型
2.1 博弈矩阵
博弈参与的主体为过街行人和机动车驾驶员;博弈主体的策略为通行和让行;行人与机动车的博弈矩阵见表1。

表1 博弈矩阵
2.2 复制动态方程
设行人选择通行的概率为,机动车选择通行的概率为。行人选择通行的期望收益和选择让行的期望收益分别为
=-1 000+(1-)
(1)
=(1-)+(1-)(1-)
(2)
行人以的概率选择通行,以1-的概率选择让行的混合策略的期望收益为
=1+(1-)
(3)
机动车选择通行的期望收益1和选择让行的期望收益2分别为
1=-100+(1-)
(4)
2=(1-)+(1-)(1-)
(5)
机动车以的概率选择通过,以1-的概率选择让行的混合策略的期望收益为
=+(1-)
(6)
系统复制动态方程为
(,)=(-)=(1-)(-)
(7)
(,)=(-)=(1-)(-)
(8)
由式(1),(2),(4),(5)得
(,)=(1-)[(-1 000--1+)++1-1]
(9)
(,)=(1-)[(-100--1+)++1-1]
(10)
3 演化均衡分析
3.1 均衡点的计算
式(9)-(10)为非线性微分方程组,求(,)=(,)=0所得解就是复制动态方程(9)-(10)的均衡点,经求解计算,得到5组解:
(0,0),(0,1),(1,0),(1,1),

3.2 稳定性分析
首先在式(9)-(10)均衡点处作Taylor展开得近似线性方程;然后获取该线性方程的系数矩阵(Jacobi矩阵);最后计算Jacobi矩阵的行列式det()和迹tr(),判断平衡点的稳定性。经计算推导,得到


(11)
因此,

(12)

(13)
为了进行均衡点的稳定性分析,要将可能的均衡点全部代入(12)和(13)式中:分别计算人车博弈系统的不同均衡点对应的雅克比矩阵的det()和tr(),见表2。

表2 均衡点对应的Jacobi矩阵的det(J)和tr(J)

表3 均衡点类型判别

3.3 演化路径分析
赋予(,)不同的初值,可以据此做出系统的演化路径图,见图1。
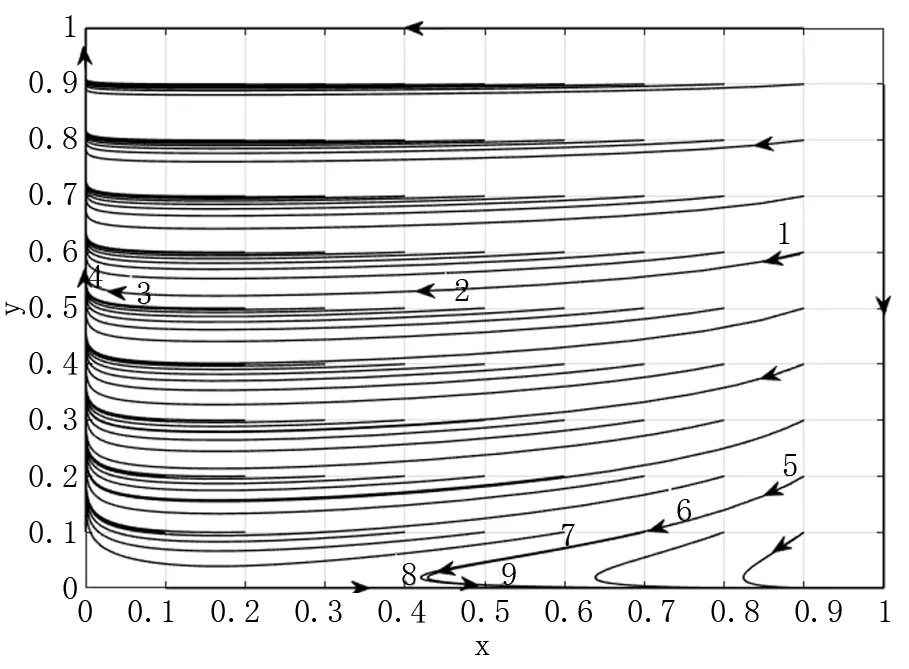
图1 演化路径图
系统演化路径如图1所示,绝大部分情形稳定在点(0,1),即人让车;少数点稳定在点(1,0),即车让人。
在人让车的情形下,以初始点(0.9,0.6)为例进行演化路径分析,该线已标为1-2-3-4。1号位置处(,)的取值约为(0.88,0.59)。在1号位置处,行人选择通行的概率和机动车驾驶员选择通行的概率都比较大。此时,双方都大概率得到非常大的负收益(行人大概率得到-1000收益值,机动车驾驶员大概率得到-100收益值)。由于行人得到的负收益值远小于机动车驾驶员的负收益值,行人需要迅速减小通行的概率,机动车驾驶员也逐渐减小通行的概率,出现演化路径1-2-3。3号位置处(,)的取值约为(0.07,0.53),行人的期望收益为-46.28,机动车驾驶员的期望收益为-11.93,机动车驾驶员与行人的期望收益差为900+(+1-1)(-)。机动车驾驶员将增大通行的概率来扩大收益差,而行人将继续减小通行的概率来缩小差距,因此演化路径为3-4,最终稳定在点(0,1),即稳定在“人让车”的情形。
在车让人的情形下,以初始点(0.9,0.2)为例进行演化路径分析,该线已标为5-6-7-8-9。在5号位置处,行人选择通行的概率较大,机动车驾驶员选择通行的概率较小。此时,行人大概率得到收益值为1/e,机动车驾驶员大概率得到收益值为1-e。双方为避免都选择通行而得到更小的收益值,将都会减小通行的概率,即出现5-6-7-8的演化路径。8号位置处(,)的取值约为(0.42,0.03),当约为0.42时,机动车驾驶员期望收益为-30.00-11.79,机动车驾驶员将继续减小通行的概率增加自身收益值,而行人将增大通行的概率来缩小期望收益差,因此演化路径为8-9,最终稳定在点(1,0),即稳定在“车让人”的情形。
据上所述,对于所有(,)的初始值,在经过一段时间的演化后,最终都会收敛到(1,0)或(0,1)。其所表达的含义为,无论行人和机动车驾驶员刚开始选择通过的概率为多少,其最终的发展趋势都是“人让车”或者“车让人”。
4 小 结
本文首先建立了人车演化博弈的复制动态方程,然后计算了该演化系统的均衡点,分析了均衡点的稳定性。最后给出人车博弈系统的演化路径图。在行人通过无信号控制路口时,当行人与机动车驾驶员没有任何的信息交流,两人的决策无法达到一致时,即行人与机动车驾驶员是根据自己所得到的信息来进行是否通行的决策时,无论行人和机动车驾驶员刚开始选择通过的概率为多少,其最终的发展趋势都是“人让车”或者“车让人”。