分离式乒乓球辅助训练机器人设计
2022-10-19张晨宇杜振豪张凤奎
张晨宇,杜振豪,刘 权,陈 凯,张凤奎
(塔里木大学 机械电气化工程学院,新疆 阿拉尔 843300)
随着体育强国战略不断地深化,越来越多的普通人积极参与到体育活动中来。而乒乓球作为我国的国球,流行程度十分广泛,在中国颇受欢迎,截至2017年,中国乒乓球人口就达到将近1 亿[1-4]。在日常乒乓球训练中打出出界、失误和无效球时,还需要训练结束后专门派人去捡,劳动强度大,易损伤腰椎[5-7],也极大地降低了训练效率。而随着人工智能的迅速发展,智能乒乓球训练机器人逐渐进入大众的视野,为大众在乒乓球训练时带来了一定的便利。但人工智能运用于体育领域的相关研究才刚刚起步,前人对于乒乓球训练机器人的研究成果相对较少,主要是集中于机器人的机械结构设计和对乒乓球的识别等一些方面,并没有完善的成果。尽管乒乓球受众广,市场前景大,出现了许多类型的乒乓球训练机器人,但目前市面上常见的都是固定式发球机和单一的捡球机产品,反而缺少一款集捡发球功能于一体的乒乓球辅助训练机器人。而且尽管目前国内的拾球、捡球机正在普及,但是普及的整体趋势不高,而且市面上的乒乓球训练机器人还存在以下的问题。
(1)机器人的拾球效率较低,且对墙边及角落的乒乓球难以去收集。
(2)机器人对发球的力度、角度、旋向和远近距离过于单一,不能实现多样化,导致无法达到预期的训练效果。
(3)该类机器人在机械结构的设计、机器视觉及路径规划等方面不够成熟,还有很大的发展空间。
因此,设计一款分离式乒乓球辅助训练机器人以满足人们需求,不仅可以起到填补市场空白的目的,还可以为分离式乒乓球辅助训练机器人的设计提供参考,再加上国内对于体育领域中的乒乓球训练智能化的需求,乒乓球辅助训练机器人将有很大的发展空间,具有一定的研究价值。
1 分离式乒乓球辅助训练机器人的功能设计
分离式乒乓球辅助训练机器人由捡球机构、储存机构、传输机构和发球机构4 个部分组成。为满足精准捡球、大容量储球、高效传送及多样式发球的设计需求,在参考扫地机器人结构原理上,对将捡球机构和储存机构进行设计。而为实现乒乓球机器人的识别检测与运动,设计了捡球机构,该检球机构通过CMOS(互补金属氧化物半导体)图像传感器识别乒乓球位置并拾取,在移动过程中采用红外传感器的图像识别功能进行障碍物躲避,最终将乒乓球收集到存储装置中,且拾取完毕后自动返回至初始点与传输机构对接。而传输机构是通过橡胶软拨片的垂直传输皮带输送至发球平台。发球机构通过脉宽调制型电机(PWM)2 个摩擦轮的转速差来控制乒乓球射出方向,其中发球机构还可以自由旋转并调整俯仰角度,实现多角度、多方式发射,从而达到辅助训练的效果,提高训练效率。分离式乒乓球辅助训练机器人模型图如图1 所示。

图1 分离式乒乓球辅助训练机器人
2 整机结构和工作原理
2.1 整体设计
据调查,乒乓球台的标准尺寸为长2.74 m,宽1.525 m,离地面高0.76 m,球网高0.152 5 m。因此对乒乓球机器人的设计尺寸为整体高度1.35 m,发射台高度在1.2~1.25 m 区间可调节。捡球机构直径0.4 m,高度为0.15 m,内置储球盒为边长0.3 m 的正方形,深度为0.1 m,容积为0.009 m3,可容纳至多14 个乒乓球。传输履带的长度为1 m,软拨片为长0.06 m、宽0.03 m 的长方形,且每2 软拨片的间距为0.05 m。因此该分离式乒乓球辅助训练机器人主要由检测装置、发球机、捡球机、收集器及旋转装置等组成。其中整体结构示意图如图2 所示。
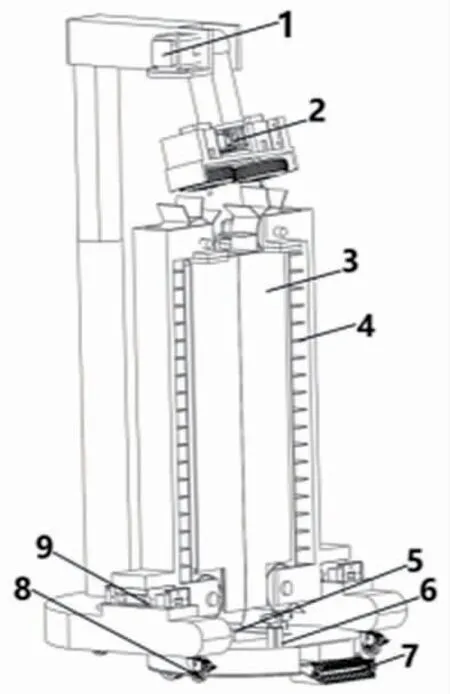
图2 分离式乒乓球辅助训练机器人结构示意图
2.2 工作原理
为实现多角度发射和智能捡球等功能,分离式乒乓球辅助训练机器人分别从检测装置、捡球机和发球机等的结构进行设计。检测装置先通过CMOS 图像传感器对乒乓球进行识别与定位,并通过SPI 芯片计算好运动路径,通过红外传感器检测路径上的障碍物避障;捡球机移动至乒乓球附近点,利用快速旋转的毛刷将乒乓球捡取入捡球机尾部的存储盒中;发球机利用传输机构将乒乓球传送至发球机构,发球机构采用摩擦轮摩擦式的发球原理进行乒乓球的发射。其中发射台可直接使用2 个摩擦轮的转速差来控制乒乓球出射方向,并且若想使乒乓球朝向不同的方向打出则只需对电机速度进行调整就可达到目标要求。若想使球朝向左侧发射则需要使右侧的摩擦轮速度大于左侧的摩擦轮速度。发射台也可以通过电机旋转来调节出射角度,发球的高度则由连接发射平台的转轴来控制发球口的仰角。而发射球的速度可由以下公式表达出来。当乒乓球以V1速度恰好过网时,可得

当乒乓球以V2的速度恰好过临界点时,可得

因此该发射球的最大速度需要控制在

上述公式中:L1为乒乓球桌长;L2为乒乓球桌宽;h为网高;g 为重力加速度;t 为时间。
以标准乒乓球桌为例,如图3 所示,L1=1.5 m,L2=2.14 m,h=0.15 m,可得到该发射球的最大速度需要控制在0.03 m/s≤V≤2.27 m/s。而发球平台和收集装置间的输送履带底部拥有固定平移方向的滑轨,方便在发球俯仰角变化后,发球台和传送带出现位移差后可进行微调保证精确度。
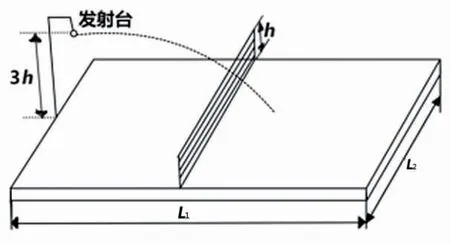
图3 乒乓球桌
3 关键部件设计
3.1 捡球装置
捡球装置的结构如图4 所示,捡球装置由行走模块、捡球模块和储存模块组成,其中行走模块为2 个伺服电机带动的前驱麦克纳姆轮和2 个后置的普通车轮,捡球机通过左右2 电机的转速差进行转向,也能在转速相同时实现前进和后退。捡球模块使用机器前方滚筒上刷子的圆周滚动进行捡球。在捡球机前方安装有1 个可以收集乒乓球的旋转圆柱刷,用以给乒乓球一推力使乒乓球能更加顺利地进入下一环节的收集盒子内部。收集模块是1个位于机身中后方的存储盒,以实现储存功能。根据资料查找了解到现在国际标准的乒乓球的直径为40 mm,质量为2.7 g,由此可以看出乒乓球的体积小,质量轻,易于拾取。被筒刷施加初速度的乒乓球会通过一个约30°的坡道被扫入乒乓球捡球装置后方的存储盒。
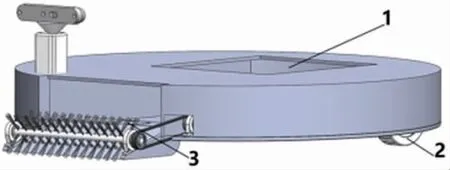
图4 捡球转置结构示意图
3.2 发球装置
发球装置的结构示意图如图5 所示,发球装置是由传输机构和发球装置组成。其中传输机构是由2 条竖直且对称的传送带组成,传送带上每隔50 mm 就有1 个橡胶软拨片。此外,2 条履带2 侧被亚克力板挡住,可防止乒乓球在上升时滚落。当捡球机将乒乓球收集完成后,则与固定至乒乓球桌旁的发球机对接,乒乓球被拥有橡胶软拨片的垂直传输皮带输送至发球平台。而发球机主要由2 个拥有相对耐磨且较软的皮套的摩擦轮组成,通过脉宽调制型电机(该电机具有调速精度高、电机运转噪声小、效率高、调速范围宽及电机运转火花小的特点,能延长电机的使用寿命)2 个摩擦轮的转速差来控制乒乓球射出方向。

图5 发球装置结构示意图
3.3 检测机构
检测机构的结构示意图如图6 所示,检测装置的图像处理模块由CMOS 图像传感器、红外传感器和双目相机等组成,其中CMOS 图像传感器和双目相机实现对乒乓球的识别与定位,并计算出捡球机的运动路径。图像处理模块上方有工作指示灯,显示检测机的工作状态,并且图像处理模块可以360°旋转扫描乒乓球场地,取样范围更广,使捡球的精度和避障的速度得以提高。
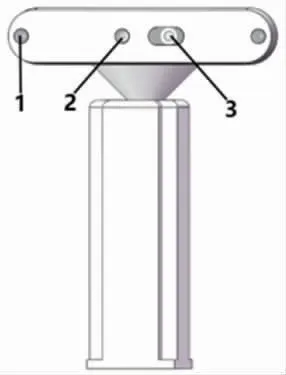
图6 检测机构结构示意图
4 结束语
通过对发球机和捡球机的创新改进,可以使乒乓球辅助训练机器人能够进行多种模式下的多角度发射训练。不仅能够更好地训练运动员们的水平,而且可以根据训练目的来适应各种水平的训练人员。
该机器人操作简便,并且机械结构层面简洁,故障率低,其智能化的操作也极大地解放了人们的双手,相较于其他种类的乒乓球辅助训练机器人,该分离式辅助训练机器人功能丰富、成本较低,适合广泛推广和使用。
