飞机舵面振荡故障载荷分析方法研究
2022-10-19庞培森
庞培森
(上海飞机设计研究院,上海 201210)
现代飞机普遍采用电传操纵系统来控制飞机的飞行。与早期的飞机设计不同,现代的飞机系统与结构已高度融合,结构设计与系统设计不再是独立并行的关系,系统与结构的相互作用以及系统对结构安全的影响受到越来越多的关注,这也是适航管理机构提出并不断完善“系统与结构的相互作用”相关条款的原因。
1 电传操纵系统对结构载荷提出新的要求
飞机在空中飞行时的每一个动作,如俯仰、滚转和偏航等,都是通过飞行操纵系统控制舵面的运动来实现的,飞行操纵系统的正常工作对飞机的安全飞行至关重要。随着科技的发展,电传操纵系统凭借其通用性高、易于维护升级、可以适应复杂的外部条件变化、易于监控和实现自动驾驶等优点,逐渐淘汰了早期的机械传动系统。
相对于机械控制系统,电传操纵系统无论是硬件还是软件都要复杂得多,这导致其故障的范围大大增加,从传感器、控制电路到作动系统,都存在着出现故障的可能。飞控系统的故障将导致飞机的异常运动,甚至带来灾难性的后果。通过无限制地提高硬件性能来避免故障是不切实际的[1],因此对系统故障的监测和处理是系统设计不可或缺的重要部分。
控制系统影响下的飞机载荷,是飞机设计领域一个较前沿的课题。联合航空管理局(JAA)在2004年提出NPA 25C-199修正案[2],为相关规章的制定奠定了基础。2005年欧洲航空安全局(EASA)在其CS 25部中增加了25.302和附录K,明确了“系统与结构的相互作用”的具体适航要求[3]。中国民用航空局(CAAC)尚未把这些要求明确写入中国民航规章(CCAR)25部[4],而是采用“专用条件”的文件对型号设计提出针对该型号的具体要求。
文献[5]、[6]总结了欧洲在这方面的研究成果,探讨了需要考虑控制系统故障引起飞机载荷的两类情况:载荷减缓系统失效和控制故障。其中控制故障包括舵面丧失或卡阻、限位失效、急偏、振荡等。
飞控系统故障很多时候是灾难性的,因此通过试飞来验证飞机能否承受这些故障通常是危险而不可行的,这种情况下载荷分析就显得尤为重要。
本文就一种典型的故障情况——舵面振荡故障,进行研究和分析,对故障载荷的分析以及监控设计方法等进行探索,抛砖引玉,使这一类问题得到更深入的研究。
2 舵面振荡故障的载荷要求
理论上飞机控制系统中有信号生成和输出的环节均有可能激发起舵面振荡,图1标示了飞机控制系统中可能的振荡源[4]。由图可见,飞机上存在着广泛的振荡故障源。具体到某一型号的飞机,需要结合故障树分析,得到飞机振荡故障的具体原因和概率。

图1 飞机控制系统中可能的振荡源
振荡的危害包括2个方面,即操纵稳定性和结构载荷。对操纵稳定性的危害是,舵面振荡超过允许的范围,可能引起飞机运动失控,或者驾驶员无法操纵。对结构载荷的危害主要是共振危害,当振荡频率接近飞机的某些固有频率时,会引起结构共振,在振荡的气动载荷激励下,飞机结构承受的载荷将急剧增大。另外,由于舵面振荡,产生交变载荷和大量的应力循环,可能导致结构疲劳。舵面振荡故障的这些危害,可能带来灾难性的后果。因此,对舵面振荡故障进行监控和限制是非常有必要的。
一个完整的舵面振荡监控系统对载荷的要求有多个层次[7],如图2所示。首先,如果振荡幅度可能使载荷超出飞机的设计载荷,则必须在很短时间内检测并切断该振荡,这定义为ToO(time of occurrence,发生时刻)问题。其次,如果飞机需要带着故障完成飞行,则振荡载荷和正常飞行载荷(包括机动、突风等)的叠加不能超过极限载荷,这定义为CoF(continuation of flight,持续飞行)问题。最后,即使CoF的要求能够满足,没有被切断的振荡仍可能会引起结构的疲劳破坏,这是振荡引起的疲劳问题。EASA在其适航法规CS 25部附录K中对ToO、CoF和疲劳等提出了详尽的要求[3],包括需要考虑的载荷、适用的安全系数和故障处置要求等。
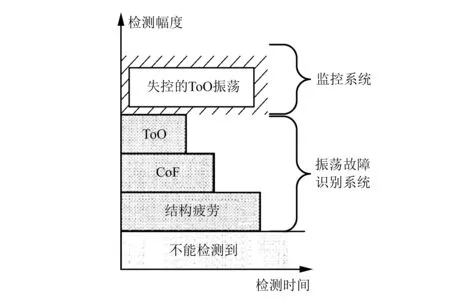
图2 振荡故障载荷监控的多层次要求
3 舵面振荡故障载荷计算模型
舵面振荡看似只有舵面局部运动,但其载荷是全机载荷,尤其是在共振频率附近振荡时,可以在全机引起很大的载荷,因此舵面振荡载荷计算需采用全机模型,可以在突风动载荷分析模型的基础上,适当修改后建立振荡载荷分析模型。
舵面建模是整个模型的关键。确定舵面转轴及铰链点,将舵面与翼面在铰链点处通过合适的多点约束(MPC)单元连接起来。为确保气动力插值的准确性,需要在舵面、翼面上增加足够多的刚体梁,使结构点全面覆盖气动面。建立翼面和舵面的气动-结构耦合样条线,将气动单元与相应的结构点耦合起来。某飞机的振荡载荷分析尾翼模型如图3所示。

图3 振荡载荷分析尾翼模型
舵面的偏转以强迫运动的形式施加于舵面,由于需要考虑气动力,因此在MSC.NASTRAN软件中采用拉格朗日乘子法来实现。舵面振荡问题,覆盖较大频率范围,宜采用频响分析。图4为某民机方向舵1°振荡时各频率上机身的侧向弯矩包线,图中载荷在4.4 Hz最严重,因为其接近机身侧向弯曲模态。民机舵面振荡的关键模态通常是机身的垂向和侧向弯曲模态。

图4 某飞机方向舵1°振荡机身各频率侧向弯矩包线
正常模式的控制律主要关注的是1 Hz以内的飞行稳定性,而振荡故障关注的机体模态频率通常是高于2 Hz的,因此控制律对振荡载荷的影响较小,且多为减载作用,从工程应用的角度,可以不考虑控制律的影响,以降低分析的难度。
以上是常规振荡载荷的分析方法,实际工作中还需要针对一些特殊的情况进行特殊的处理。例如,振荡信号通常假设为正弦信号,但也可以是三角波、锯齿波信号[1]。振荡故障信号可分为“硬振荡”和“软振荡”,前者是指信号为纯粹的振荡信号,后者是指振荡信号附加在正常信号上[1,5],这两种振荡信号在考虑控制律的载荷计算、监控系统设计和测试中都必须考虑。此外还有多个舵面组合振荡的情况,例如一对升降舵的对称振荡,或者方向舵和升降舵同时振荡等。对于只能向上偏转的多功能扰流板,其气动力、振荡信号形状等都有特殊性,其载荷分析模型和方法也有很大的不同。
4 舵面振荡故障载荷监控设计
舵面振荡载荷的处理方法与常规载荷的处理方法是不同的。常规的载荷采用确定工况条件—计算载荷—校核结构这样的处理方法。但在某些共振频率附近,舵面振荡载荷远高于结构的设计载荷,这决定了振荡载荷难以通过加强结构来解决。在舵面振荡故障研究的早期阶段,国外某些型号尝试了按常规载荷的过程来处理舵面振荡载荷。随着研究和认识的深入,现在国内外在型号(如波音777、波音787,空客A320等)上已普遍采用反向的载荷方法来处理振荡载荷。反向的载荷方法就是由结构的承载能力反推出结构能够承受的振荡范围。在飞控系统中,监测舵面振荡的发生和幅度,一旦振荡超出可承受的范围,立即作出相应的纠正动作,避免危险的发生。也就是说,舵面振荡问题是通过设计监控系统来解决的。
振荡载荷分析及监控设计的流程如图5所示。在舵面上施加单位角度(1°)的振荡,在一定频率范围内做振荡载荷频响分析,得到飞机各站位、各频率上的振荡载荷,依照各自的适航要求,分别推算ToO、CoF允许的振荡角度。

图5 振荡载荷分析及监控设计流程
按照式(1)推算ToO、CoF允许的振荡角度AToO和ACoF:
(1)
式中:UL、LL分别为飞机各部件的极限载荷包线和限制载荷包线;SFT、SFC分别为ToO、CoF需要使用的安全系数;L1g为飞机的1g平飞载荷;Lunit为舵面单位角度振荡的增量载荷。式(1)为单值载荷计算,结果偏保守,采用复合载荷计算[7]可降低结果的保守性。
图6为某飞机按照以上流程得到的振荡载荷允许角度曲线。图中给出各部件在各频率上可承受的舵面振荡角度,间接反映了部件载荷随振荡频率的变化趋势。这种按照载荷推算的角度是比较保守的,在共振频率上角度较小,可能超出供应商的能力。在此情况下,研究了从载荷层面提高到应力层面的途径,通过特殊设计的正交载荷匹配方法得到应力,校核共振频率上的应力来放宽监控要求,在图6中即采用该方法放宽了监控要求。

图6 某飞机的振荡载荷允许角度曲线
振荡故障的检测以及监控要求在系统中的硬件实现是控制专业的一大课题,涉及滤波器和自适应算法等。文献[1]、[6]~[11]研究并测试了不同的振荡检测、监控方法,以提升监控的精度和可靠性。
5 振荡载荷试飞验证与修正
振荡载荷本质上可以反映出飞机的频响特性。可以通过舵面振荡激励试飞以及验证振荡载荷的计算方法,检验和修正载荷分析模型。舵面激励可以是安全限度内的舵面扫频,或者单一频率的振荡激励。对比数据可以是飞机的速度、加速度和载荷等。图7为某飞机升降舵激励时试飞和分析的俯仰角速度对比。依据地面共振试验(GVT)和试飞的结果进行结构模型的修正,依据风洞的结果进行气动模型的修正。

图7 某飞机升降舵激励时试飞和分析俯仰角速度对比
6 结束语
电传操纵系统作为控制飞机运动的大脑,其与飞机结构的耦合对结构载荷和安全的影响都需要充分研究。舵面振荡故障可能引起灾难性的共振,对其进行全面的分析和监控,对于飞机安全是必不可少的重要环节。
舵面振荡故障载荷问题是载荷的反问题,这是其区别于常规载荷问题的核心。适航局方因为比较熟悉常规载荷,而对振荡问题缺乏必要的认识,导致在适航过程中常常按照常规载荷的思路去审查。这是当前振荡载荷分析工作需要面对的一个现状,也说明这方面的研究工作任重而道远。
