ROV脐带缆水动力分析
2022-10-18施兴华钱佶麒
施兴华,曹 奔,钱佶麒,周 游
(江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003)
0 引 言
脐带缆是ROV的重要组成部分,利用脐带缆将控制台和ROV连接在一起用于传输控制信号、数据、视频、液压和电力信号,因控制台安装在母船上,领航员负责远程操控水下机器人,按照相关要求进行水下作业。在工作过程中,ROV运动、海流、海浪等因素会拉伸或挤压脐带缆,母船甲板也会在一定程度上磨损脐带缆,脐带缆还可能与船身产生缠绕导致磨损。因ROV运行会产生牵制力并作用于脐带缆,需考虑上述牵制力等因素并全面分析脐带缆的水动力性能。
冯现洪等研究的深水脐带缆布局方式为悬链线布局,通过研究发现了一系列分布特性,比如有效张力、弯曲曲率、初始线形等,在此基础上总结其整体结构响应。张大朋等以某拖拽系统为例,使用OrcaFlex仿真软件完成建模过程,并通过调整关键参数分析其是否会影响水下拖体,关键参数包括回转半径、拖缆参数、水动力系数、拖速等,研究成果可用于指导解决具体工程问题。李泯等建立水下脐带缆动力学模型,求解边值问题微分方程,通过定量数值计算得到ROV携带自由端脐带工况的结果和ROV携带分段绑扎脐带工况的结果,可用于处理相似的工程问题。Wadi等针对自主水下机器人展开研究,借助有限元分析软件Ansys-XFX识别附加惯性系数和阻尼力,通过对比实验结果发现,二者基本吻合。Eng等分别从ROV舷摇、纵荡、垂荡、横荡4个自由度通过CFD方法得到附加质量的计算结果,并成功将ROV横荡自由度附加质量的误差范围控制在2%以内。
本文研究的ROV体积较小,设计下潜深度为35 m,基于ROV自身特点以及作业要求,本文将模拟近海海况下ROV的运行,探究ROV在不同运动模式下脐带缆受到的水动力特性。运用水动力软件AQWA获得母船被动运动状态下的RAO,基于AQWA软件得到的RAO数据,利用OrcaFlex建模并进行水动力仿真,获得脐带缆所受到的有效张力、Strouhal频率和缆绳位移等一系列水动力响应数据,并结合计算出的水动力性能结果提出建议。
1 ROV模型的建立
本文研究的ROV主体长度450 mm,主体宽度320 mm,主体高度260 mm,质量9.534 kg。主体如图1所示,由1个圆柱浮体、4个导管推进器及起落架构成,可以控制升降和进退运动。采用对称面螺旋桨的差速转弯方式,能够在水下实现2个自由度的转向。根据导管螺旋桨的布置,在静水中可以实现沿2个方向的移动和绕2个方向的转动。由于ROV在作业时,几乎不会进行自主的横摇运动,所以在该自由度上的运动不做讨论。

图1 简化的ROV三维模型Fig. 1 Simplified ROV 3D model
本文主要分析ROV在水平、垂直以及绕垂直轴旋转3个自由度上的水动力特性。为了提高计算结果准确性,最大限度还原ROV的各部分结构,保留螺旋桨叶片、起落架、金属把手等存在突起、尖端和小的附着物。在对螺旋桨叶片进行建模时,由于并不考虑螺旋桨旋转对ROV产生的推力,将其简化为无螺旋等厚叶片。ROV主尺度如表1所示。
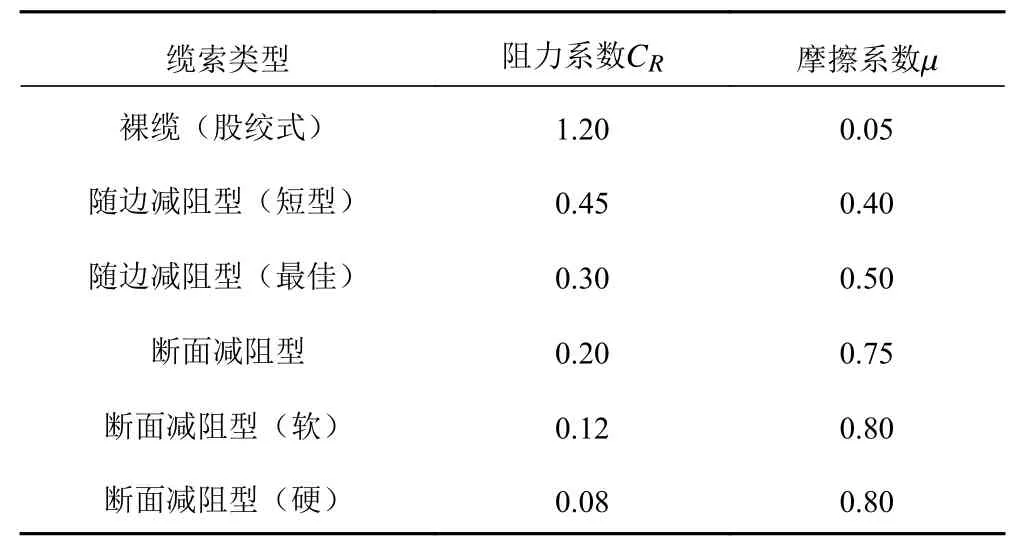
表1 典型缆索参数Tab. 1 Typical cable parameters
2 模拟工况及环境参数
借助水动力软件OrcaFlex对ROV脐带缆进行水动力分析,ROV自主运动带动着脐带缆在水下的运动。故ROV运动的深度、速度及方式对脐带缆的影响较大。同时,脐带缆本身的属性也影响着自身的水动力性能。所以,选择合适类型的脐带缆以及海况作为模拟计算脐带缆水动力的外部条件显得尤为重要。
模拟工况选择在近海海域进行,设置的波高为3 m,波浪周期为5 s。ROV在海底30 m的深处进行定速前进、后退和旋转运动。前进和后退的速度为2 kn,定速旋转下的工况设置3个旋转半径,分别为1 m,2 m,4 m,对应的旋转一周周期分别为4 s,8 s,16 s。
3 母船与脐带缆、ROV连接系统模型的建立
3.1 脐带缆主要参数
首先对脐带缆做以下规定:假设选用匀质脐带缆,上端为入水口,下端为ROV连接点。考虑到ROV的影响,保持移动速度一定,若ROV的运动模式是水平运动,则ROV始终在垂直方向和水平方向组成的平面内运动。
同时,为了简便计算,做出以下假设:1)脐带缆是完全挠度的,即只收到脐带缆张力;2)作用在脐带缆某一单元的水动力仅取决于该单元的脐带缆相对于水流的角度;3)脐带缆在拖拽时忽略自由面的影响。
影响脐带缆水动力性能的因素主要为脐带缆与水接触时的摩擦力。脐带缆接触到水后,摩擦力随脐带缆的不同存在一定的差异。同时,摩擦系数 是摩擦力值的关键参数。表1给出典型缆索的C(阻力系数)和µ(摩擦系数)的值。
结合ROV自身特点以及设定工作深度等因素,采用长度为50 m的脐带缆,外径为0.008 m,内径忽略不计,法向阻力系数C为1.1,脐带缆的摩擦系数µ为0.05。等效计算后,单位长度质量为0.12 kg/m。
3.2 系统模型的建立
所建立的系统主要由母船、脐带缆和ROV组成,这三者连接点的选取以及连接方式尤为重要。首先,所选用的母船为一小水线面双体船(SWATH),其参数为:总长89.6 m,型宽30 m,型深15.5 m,设计水线长86 m,吃水7.5 m,支柱中心距22.6 m,支柱最大宽度3.2 m,湿甲板高度11.6 m,排水量5580 t。图2为母船局部截图。
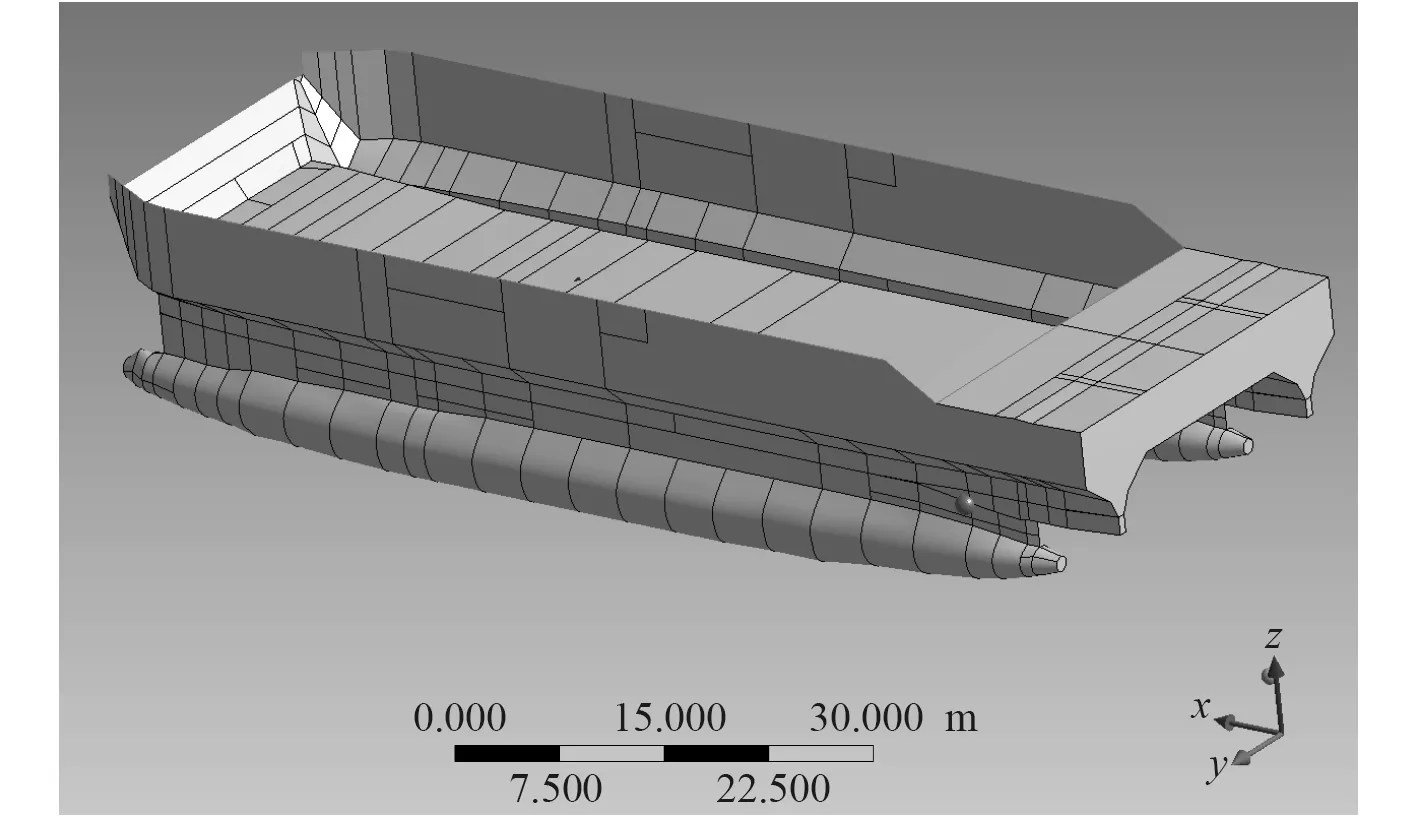
图2 母船局部截图Fig. 2 Partial screenshots of the main ship
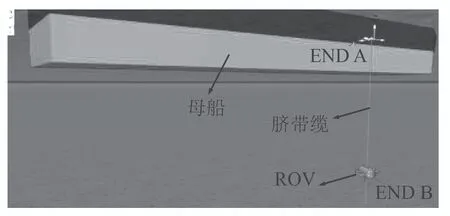
为了避免母船尾部螺旋桨产生的推力对脐带缆的受力影响,将脐带缆与母船的连接点设置在母船一侧中央距船底部8.5 m处,即距离满载吃水线1 m处。在母船与脐带缆连接处,连接点的连接方式设置为自由旋转,不考虑ROV在旋转运动时可能对脐带缆内部张力性能等产生的影响。脐带缆与ROV的连接点设置在ROV长度方向130 mm,宽度方向0 mm,高度方向250 mm处,并设置ROV在距水面30 m的深度运动。所建立的系统模型如图3所示。
RAO是影响母船运动状态的决定性因素,母船状态是影响系统模型上部边界条件的决定性因素。浮体或船舶在海洋中作业的行为一般利用RAO进行求解。通常由CFD计算程序或水池试验提供船体RAO的相关数据,需要计算船舶在不同波浪条件下的运动情况。在OrcaFlex中,母船RAO的数据一旦确定,则其运动情况也就确定了。利用水动力软件AQWA计算不同频域下六自由度母船被动运动时的水动力系数,并结合OrcaFlex软件,最终确定母船的RAO数据。
4 计算结果
研究对象的母船为一艘SWATH双体船,满载排水量5 580 t,设定的ROV的运动深度为30 m,浪向的改变并不会对母船及ROV的水动力造成较大的影响,而流向的变化会使脐带缆承受的动力载荷发生较大的变化。因此,必须进行不同流向下的脐带缆水动力分析,得到脐带缆水动力系数,以确保整个操作过程的安全与稳定。为了简化模型和节省计算时间,忽略浪载荷以及风载荷的作用。流向选取 0°~180°,每30°取一个流向。脐带缆与母船的连接点设置为End A,即脐带缆长度的0 m点;水下与ROV的连接点设置为End B,对应沿脐带缆长度方向的50 m 点。
为了对比分析脐带缆在ROV不同运动状态下受到的牵制力,模拟ROV的3种不同的运动状态,即前进、后退和回转运动,并设置ROV前进和后退的速度为2 kn,回转半径为1 m,回转周期为4 s。
4.1 不同流向下脐带缆受到有效张力
通过分析不同流向下脐带缆的固定端(End A)和自由端(End B)受到有效张力随时间的变化、沿缆长方向的Strouhal频率等水动力参数,讨论ROV在定速前进和后退时不同流向对脐带缆水动力的影响。
图4、图5分别为ROV在前进和后退时End A与End B有效张力的时历分布图。可以发现,ROV在前进时,脐带缆End A与End B端的受力图像形态在一定程度上具有相似性,呈周期性波动,且A端的受力在相同时间上略大于B端的受力。以180°流向角为例,A端在11.6 s时达到最大值0.2737 kN,而B端在11.7 s时达到最大值0.2675 kN,最小值均在8.3 s时达到,A端为0.1492 kN,B端为0.1425 kN。这主要由于在A端连接着母船,受到浪的影响明显大于B端,所以母船的运动状态使得A端的受力增大。力具有传递性,牵制力从A端传递至B端过程中也会有一定的消耗。脐带缆所受的牵制力呈周期性波动,且周期大致为5 s,与之前所设置的波浪周期一致,这和理论分析结果相一致。同时可知ROV后退时A和B两端的受力随时间的变化与前进时的趋势一致。
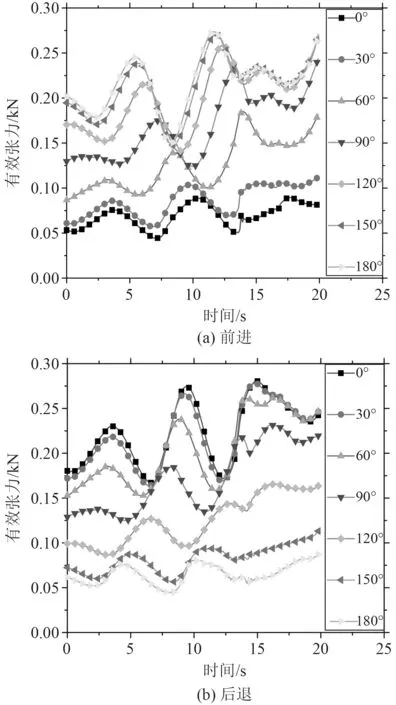
图4 ROV前进、后退时各流向下脐带缆End A有效张力时历分布图Fig. 4 The time history distribution of effective tension at the End A of the umbilical cable in each flow direction when the ROV advances and retracts
ROV在前进时,0°的流向角属于顺流,180°则是逆流。通过图4和图5可以看出,所取的0°~180°这7个流向角,张力依次增加,且相邻流向角下的张力时历分布具有相同的形态特征,符合理论研究结果。而ROV在后退时,0°的流向则是逆流,反之,180°为顺流,所以在张力分布上,随着角度的增加,张力呈逐步减小的趋势。对比脐带缆A端受力的2张图可以发现,逆流时脐带缆受力的峰值约为顺流时峰值的4倍,而在B端,逆流时脐带缆受力峰值约为顺流时峰值的5倍。
ROV处于前进或后退运动状态,脐带缆在缆长方向的最大有效张力、最小有效张力和平均有效张力的变化情况如图6和图7所示。可以看出,在流向不同的情况下,脐带缆在缆长方向的最大有效张力、最小有效张力和平均有效张力均呈现两端受力大,中部受力小的形态,虽各自有小幅度起伏,但是变化不大。这说明了脐带缆在ROV运动过程中受力比较均匀。受力呈现两头大中部小的原因在于靠近母船一端由于受到母船运动状态以及浪、流等环境因素的影响,脐带缆会受到较大的牵制力,而靠近ROV的一端,由于ROV的运动,以及流等的影响,这部分的缆绳受力也将大于中间部分。对比图6和图7,不难发现由于ROV运动方向相反,所以相同的流向下前进和后退时所受到流向的作用也是相反,ROV前进和后退流向角之和为180°的2条曲线呈现相似的形态。在ROV同一运动状态下,相邻流向角的有效张力也具有相似姿态。
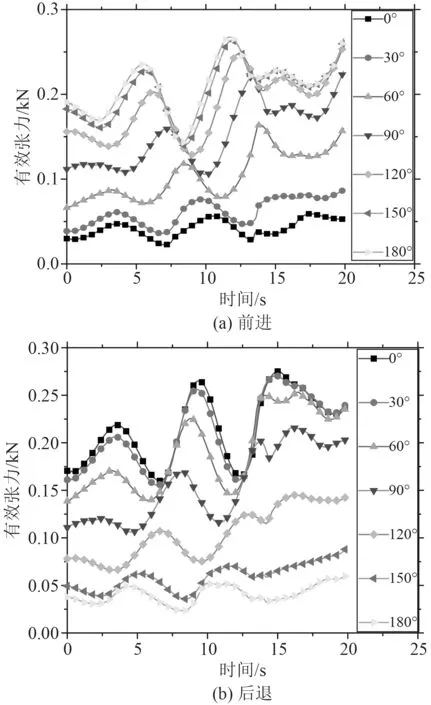
图5 ROV前进、后退时各流向下End B有效张力时历分布图Fig. 5 The time history distribution of effective tension at the End B of the umbilical cable in each flow direction when the ROV advances and retracts
4.2 不同流向下脐带缆Strouhal频率的水动力分析
由脐带缆的Strouhal频率可知,在脐带缆粗细一定的情况下,Strouhal频率的数值越高,则水流相对于脐带缆的速度越大。Strouhal频率的数值大小在一定程度上也可以表示脐带缆受母船以及ROV影响的大小。
ROV处于前进运动状态或后退运动状态下,脐带缆在缆长方向的最大Strouhal频率、最小Strouhal频率和平均Strouhal频率的变化情况如图8和图9所示。在脐带缆直径一定的情况下,Strouhal频率越大,脐带缆附近流体保持越快的速度运动,而物体做定常运动时这一参数的值为0,不予考虑。对比平均值2张图可以看出,Strouhal频率从顺流至逆流呈增长趋势。对比8(b)与9(b),8(c)与9(c)可以发现,在靠近母船处脐带缆的Strouhal频率有明显增大的趋势,特别是在1~7 m处也就是水面至母船船底的脐带缆部分,Strouhal频率出现激增,并且达到峰值时的缆长从逆流至顺流依次增加。原因在于靠近母船处,母船的运动会带动脐带缆的运动,使得靠近船体部分特别是母船底部的流体流速明显大于其他部位。

图6 ROV前进时沿缆长方向脐带缆有效张力变化Fig. 6 Effective tension of the umbilical cord varies along the length of the cable as the ROV adv
脐带缆10 ~30 m区间Strouhal频率又有一段明显的上升,极大值出现的位置点随着顺流至逆流依次提前。这可能是由于在此区间范围内的流体受到了母船和ROV运动的影响,流体相对于脐带缆速度明显增大。在逆流时此区间受到母船运动的影响较大,极大值出现的区间靠近母船,顺流时则相反。在脐带缆50 m左右的区间,Strouhal频率较小,但也有小幅的回升,ROV在顺流时回升幅度比较慢,逆流时回升幅度则相对较快。原因在于,随着水深以及脐带缆长度的增加,脐带缆所受的阻力以及自重的影响也越来越大,使得流体相对流速的增加变得困难。由于ROV属于自主运动,且运动状态为定常运动,使得固定ROV一端的Strouhal频率显著降低。相邻的2个流向角下的Strouhal频率曲线呈现相似的姿态。
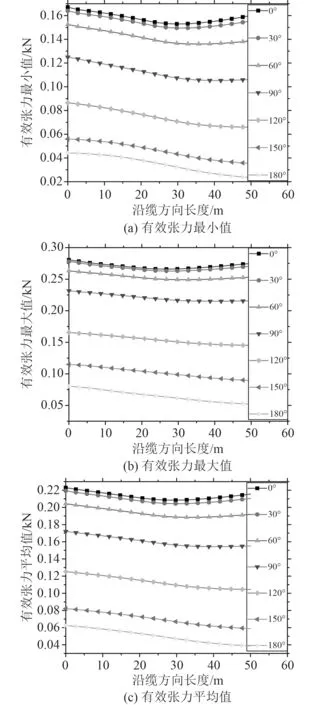
图7 ROV后退时沿缆长方向脐带缆有效张力变化Fig. 7 Effective tension of the umbilical cable changes along the cable length when the ROV retracts
4.3 ROV回转运动时脐带缆水动力分析
对目标物体的观察是ROV执行水下任务的重要组成,为了更好地执行观察任务,需要对目标物体进行360°的观察。在ROV进行回转运动时脐带缆和其本身容易产生纠缠。脐带状态无法监测是导致纠缠问题发生的关键,同时,脐带缆过长会增加自身承受的阻力,对此,必须掌握缆索的水下特性。因此,探究ROV在水下的回转运动,分析脐带缆的受力,得到脐带缆的一系列水动力系数,为具体工程提供指导意见。
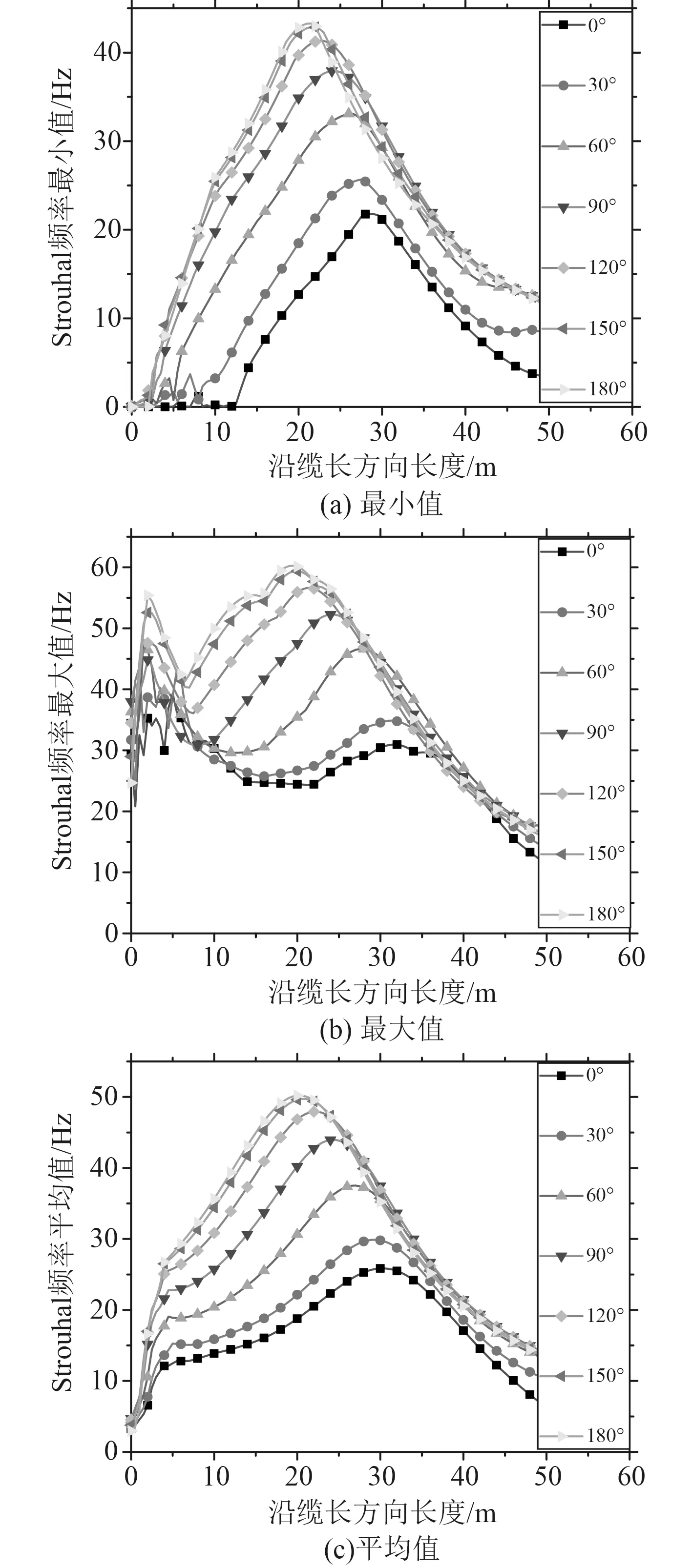
图8 ROV前进时沿缆长方向Strouhal频率变化Fig. 8 Strouhal frequency changes along the cable length as the ROV advances
通过建模改变ROV的旋转半径,实现ROV定速度的旋转运动。设定作业工况为坐标轴正对向上,ROV做顺时针旋转两周接逆时针旋转2周。旋转半径分别为1 m,2 m,4 m,速度为1.57 m/s,旋转周期分别为4 s,8 s,16 s。由于速度方向无法瞬间转向,这样违反了物理法则,所以在顺时针与逆时针期间设置了一个速度缓冲区,使速度大小降为0再反向运动,速度缓冲区时间为8 s。设置的浪与流的方向均为180°。
图10为ROV在不同半径下旋转时脐带缆A端、B端有效应力变化曲线。可知,应力呈现周期性变化,周期为ROV旋转1周的时间。A端的有效应力曲线与B端应力曲线呈现相似的形态,且A端应力略大于B端应力0.02 kN左右,这一点与前进和后退时相似。

图9 ROV后退时沿缆长方向Strouhal频率变化Fig. 9 Strouhal frequency changes along the cable length when the ROV retracts
在开始的0.1~0.4 s内,3种半径下的A端、B端应力曲线都发生了大幅震荡,B端脐带缆的受力大于A端约0.1 kN。出现此现象的原因可能是,一方面,由于ROV旋转的方向为先顺时针后逆时针,顺时针启动瞬间,ROV处于逆流,流体相对于ROV运动速度较大,以至于脐带缆B端受力出现短时间的震荡;另一方面,由于不同于前进和后退,在旋转时,ROV的运动方向一直都在改变,运动速度大小也没有达到稳定,脐带缆会发生较为剧烈的震动。所以在ROV启动瞬间,B端脐带缆的受力会出现大幅震荡,待运动状态稳定后,该现象消失。A端受力受到B端受力的影响,也会出现震荡,由于力在传递过程中的消耗,震荡幅值小于B端。

图10 不同旋转半径下脐带缆End A与End B应力变化曲线Fig. 10 Stress change curves of umbilical cord cable End A and End B under different radii
ROV在旋转过程中,脐带缆中点的运动轨迹在一定程度上可以反映出整条脐带缆的运动状态。图11为ROV在不同旋转半径下,脐带缆中点和方向的运动轨迹图。对比方向轨迹时历图可以发现,曲线呈周期变化,周期大致为ROV在其旋转半径下旋转一周的时间,幅值为ROV旋转的直径。随着旋转半径的增加,速度缓冲区对方向位移的影响逐步减小。值得注意的是,若把ROV旋转构成的圆分为四等分,则脐带缆中点能达到最大偏差与恢复到起始位置所花的时间也被分成了4部分,但是每部分所花时间在逐渐减小。以r=4 m,第2圈顺时针运动为例,4个时间分别为5.7 s,4.7 s,4 s,2.1 s。对比方向曲线还可以看出,在ROV旋转时,经过1个周期,脐带缆中点方向可以比较及时回到初始位置,并进行下一周期的运动。从图11可看出,方向的轨迹也呈现周期性,并且随着旋转半径的增加,周期性更加突出。方向曲线整体呈现下降趋势,即脐带缆中点在方向上逐渐偏离初始位置,不同于方向快速回到初始位置,在旋转半径为1 m,2 m,4 m时,方向同周期内回升的幅度分别仅有下降幅度的约10%,33%和40%。在各半径的速度缓冲区内,曲线均有大幅度回升。

图11 不同旋转半径下脐带缆中点x方向、y方向轨迹图Fig. 11 Trajectories in x direction and y direction of midpoint of umbilical cord under different radii
图12为ROV在不同运动半径下脐带缆中点运动轨迹图。可以发现,曲线呈现螺旋式下降的趋势。可能的原因在于ROV开始做的是顺时针运动,而流向与瞬时运动方向的切线方向同向,这使得运动的瞬间方向获得了更大的力。由于脐带缆在水中受到浮力、阻力等的影响,自身质量的影响相对于ROV牵引力很小,随着ROV运动的稳定,使得方向在顺流时回到初始位置的时间大幅减小,逆流时时间也有所减少。而对于方向,由于一开始受到的力很小,使得3个旋转半径下方向前5 s几乎没有改变;另一方面,脐带缆在方向的运动相较于方向受到流体阻力明显增加。
5 结 语
本文模拟ROV前进、后退和回转3种运动状态,研究了ROV在不同运动状态下脐带缆的一系列水动力系数,得到如下结论:
1)不同流向下,ROV前进、后退时,脐带缆End A与End B两端受力随时间呈现周期性变化,周期大致为波浪的周期,End A端张力略大于End B端,且顺流至逆流有效张力依次增大,相邻流向角下张力曲线呈现相似的形态。沿缆长方向,不同流向下,张力曲线较为平缓,由于母船和ROV运动的影响,呈现两头大中间小的形态。有效张力远小于脐带缆的许用应力,满足工程要求。

图12 不同旋转半径下脐带缆中点轨迹图Fig. 12 Track diagram of midpoint of umbilical cord under different rotation radii
2)由于母船和ROV运动的影响,在靠近母船和ROV运动部分的流体相对于缆绳运动速度较大,进而Strouhal频率较大。而接近缆绳底部,由于ROV运动属于定常运动,Strouhal频率大大降低,不过也有一定程度的回升。
3)在ROV旋转过程中,脐带缆两端张力也呈现周期性变化,周期约为旋转周期,在ROV启动旋转瞬间,由于运动方向及运动速度的不稳定,流体相对于脐带缆作用力的方向及大小也会出现波动,导致开始的一小段时间张力大小出现了震荡,不过最大张力依然远小于最大许用应力,满足实验要求。
4) ROV在旋转时,由于流向的设定,脐带缆中点方向能较快回到初始位置。而方向,由于相较于方向受到的阻力明显增大,导致在方向有不断偏移的趋势。这从侧面反映出该工况下整条脐带缆随着ROV的旋转有被拉伸的趋势。
