船舶VTS雷达信号测试与分析技术
2022-10-18高积学
高积学
(郑州工业应用技术学院 信息工程学院,河南 郑州 451100)
0 引 言
我国海事部门在VTS雷达技术的开发和使用方面取得了一定成绩,借助雷达信号实现对所管辖区域内船舶的全面监管,改善了监控水域的交通秩序,能够保证水上交通环境安全。在VTS雷达信号中,脉冲波雷达是雷达信号的主要形式,为保证雷达信号实时传输,需要依靠FPGA(简称:大规模现场可编程门阵列)实现雷达信号算法,优化维护雷达信号控制,消除海上杂波对雷达信号的影响。
1 船舶VTS雷达信号
1.1 雷达工作原理
VTS(船舶交通服务系统)是对港口、航道进行交通管理和提供交通服务的综合性系统,其目的在于保证船舶交通安全,提高交通效率。在船舶VTS中,雷达是主要的监视设备,由收发机、发射机、接收机、处理器、显示器、天线等部分构成,如图1所示。VTS雷达运行由定时脉冲触发,产生大功率射频脉冲,脉冲通过发射机放大信号,借助天线向水平空间扫描波束。当遇到探测目标后,扫描信号形成反射回波,发送回天线,天线检测到信号传输到接收机,由接收机处理回波信号,处理后将信号传输到终端显示器,以数据信息形式显示并存储。
1.2 雷达信号模拟软件

图1 船舶VTS专用雷达结构图Fig. 1 Structure diagram of special radar for vessel VTS
雷达信号模拟软件开发是船舶VTS雷达信号测试与分析的基础,本文提出基于MFC框架VC编程开发软件,并运用光栅扫描方法扫描雷达目标,探测雷达信号。采用仿真软件开发雷达信号模拟软件,要求界面简洁、窗口清晰,能够完全模拟VTS雷达信号覆盖范围,根据探测需求移动雷达站位置,重新确定雷达信号覆盖范围。仿真模拟软件结构如图2所示。主要包括以下3个模块:一是人机交互模块,用于满足用户的远程操作访问,要求该模块具备操作便捷性,能够输入各种参数和三维GIS数据,直观显示雷达信号仿真结果;二是回波计算模块,用于模拟VTS雷达信号覆盖情况,计算模拟效果,该模块由计算参数设置与回波计算部分构成;三是信号仿真显示模块,通过观测雷达模拟信号结果,查看是否存在盲区,为消除盲区提供技术支持。
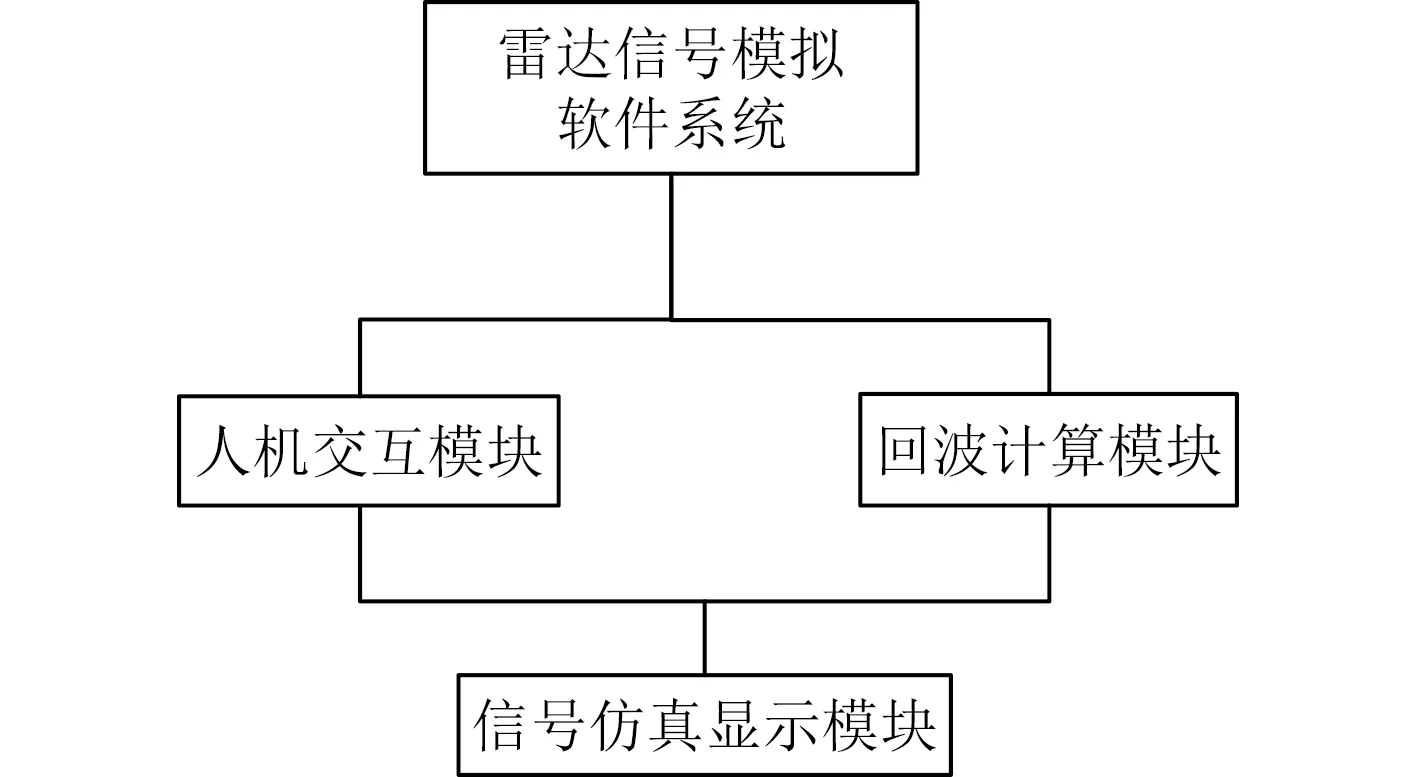
图2 船舶VTS雷达信号模拟软件系统结构图Fig. 2 Structure diagram of ship VTS radar signal simulation software system
1.3 雷达信号测试设计
船舶雷达信号测试可以对雷达系统接收和输出信号载波频率进行精确测试分析,主要包括三个部位:一是比较信号源模块,借助MCU对比较信号源的相位、载波频率、幅度等参数进行控制,完成晶体振荡器锁相环操作。二是本振源模块,利用乘法器MIX测定雷达信号,在滤波器过滤掉高频部分,将过滤掉的信号与比较信号用于测试。三是变频混频模块,利用锁相环输出信号,在输出过程中会生成谐波,利用带通滤波器过滤掉谐波,用于比较信号功率数据控制。船舶雷达测试系统结构如图3所示。在设计过程中要确定雷达信号频率范围、组带、带通衰减波纹等参数,当雷达信号频率范围在9.02~9.87 GHz时,阻带衰减系数为0.048,带通边缘衰减系数为0.045;当雷达信号频率处于上波纹波动时,组带衰减系数处于下波纹浮动;当雷达信号频率范围在0.012 GHz时,阻带衰减系数为0.009。
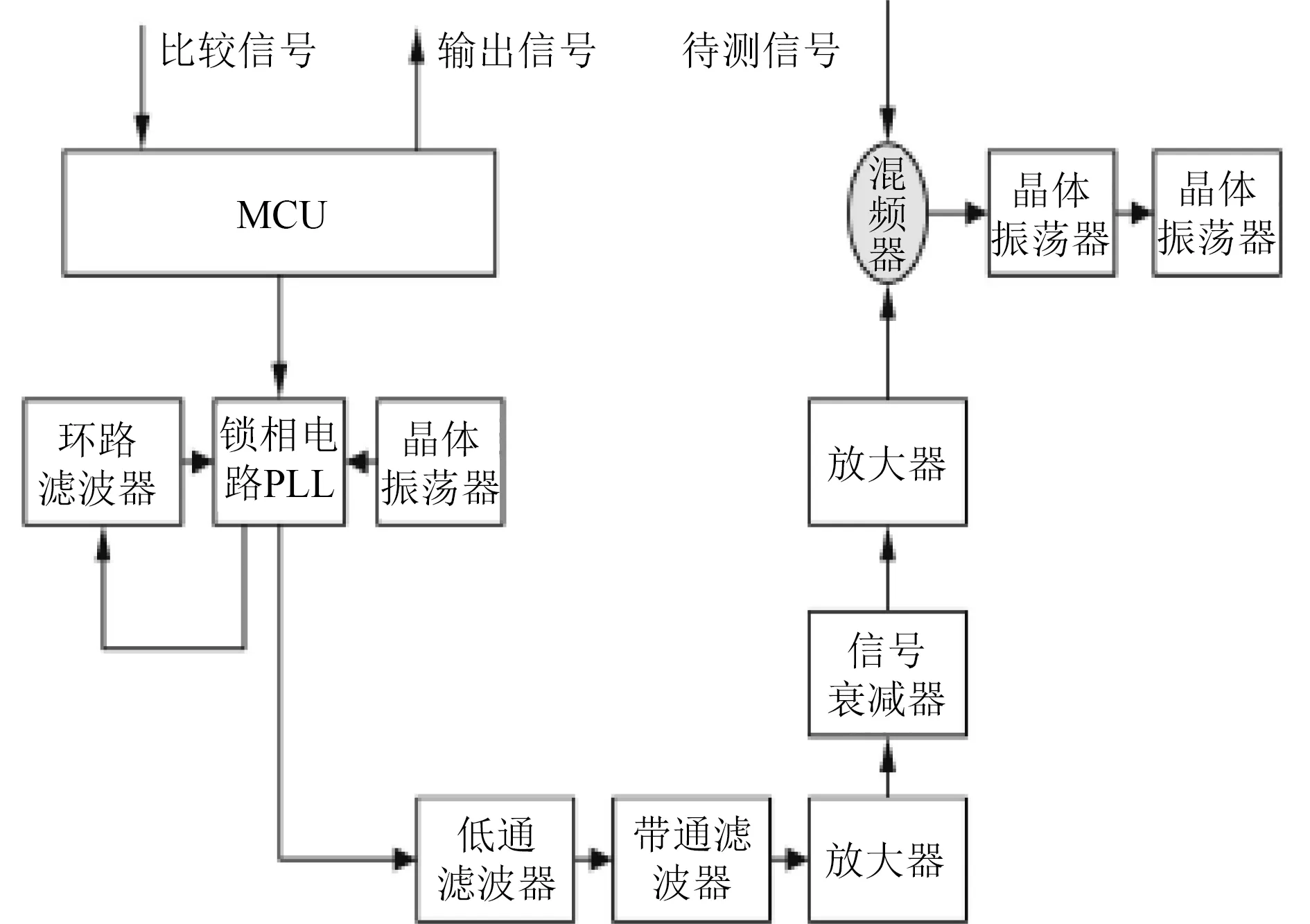
图3 船舶VTS雷达信号测试系统结构设计Fig. 3 Structural design of ship VTS radar signal test system
低通滤波器采用RC电路,滤波器结构如图4所示,频率传输计算公式为:

对经过低通滤波器域函数进行转换,得出比较信号加权值,公式为:
将载波频率转化为线形函数,用于抵消各类载波对载波频率和相位变化带来的影响,计算公式为:

在设计带通滤波时也可以采用上述公式,用RC电路替代LC电路即可。

图4 船舶VTS雷达信号测试系统中低通滤波器运行结构图Fig. 4 Operation structure diagram of low-pass filter of marine VTS radar signal test system
2 船舶VTS雷达信号测试与分析技术
2.1 雷达信号测试模块构建
在舰船VTS雷达信号测试中,需设计系统控制模块,用于控制指令、数据速率、方位选择以及量程等参数。雷达信号系统控制模块包括:
指令解析模块。用户向雷达信号系统中发送调节控制指令,包括雨雪控制、海浪控制、偏心显示等,其实现步骤为:在系统中设置32位变量,从网口接收9个字节数据长度,对数据是否定义为指令帧头进行分析;当判定为指令帧头后继续判定下一个帧头,将判断依据存储到cmd_data变量中,再继续判断帧头;当数据中不再出现指令帧头后,清零处理变量,等待网口传输新的数据,完成数据接收。
数据速率控制模块。该模块要保证存储的雷达信号形成不同量程的分频指数,按照不同的分频系数读取ROM数据。以2 Nm量程为例,分频系数为3,利用计数器计算每间隔2个时钟周期的高电平有效使能,雷达信号测试中数据速率控制实时采集图如图5所示。当量程信号为0X06时,计数器按照0,1,2周期变化,读取cnt0,数据速率信号也呈现出周期性变化。
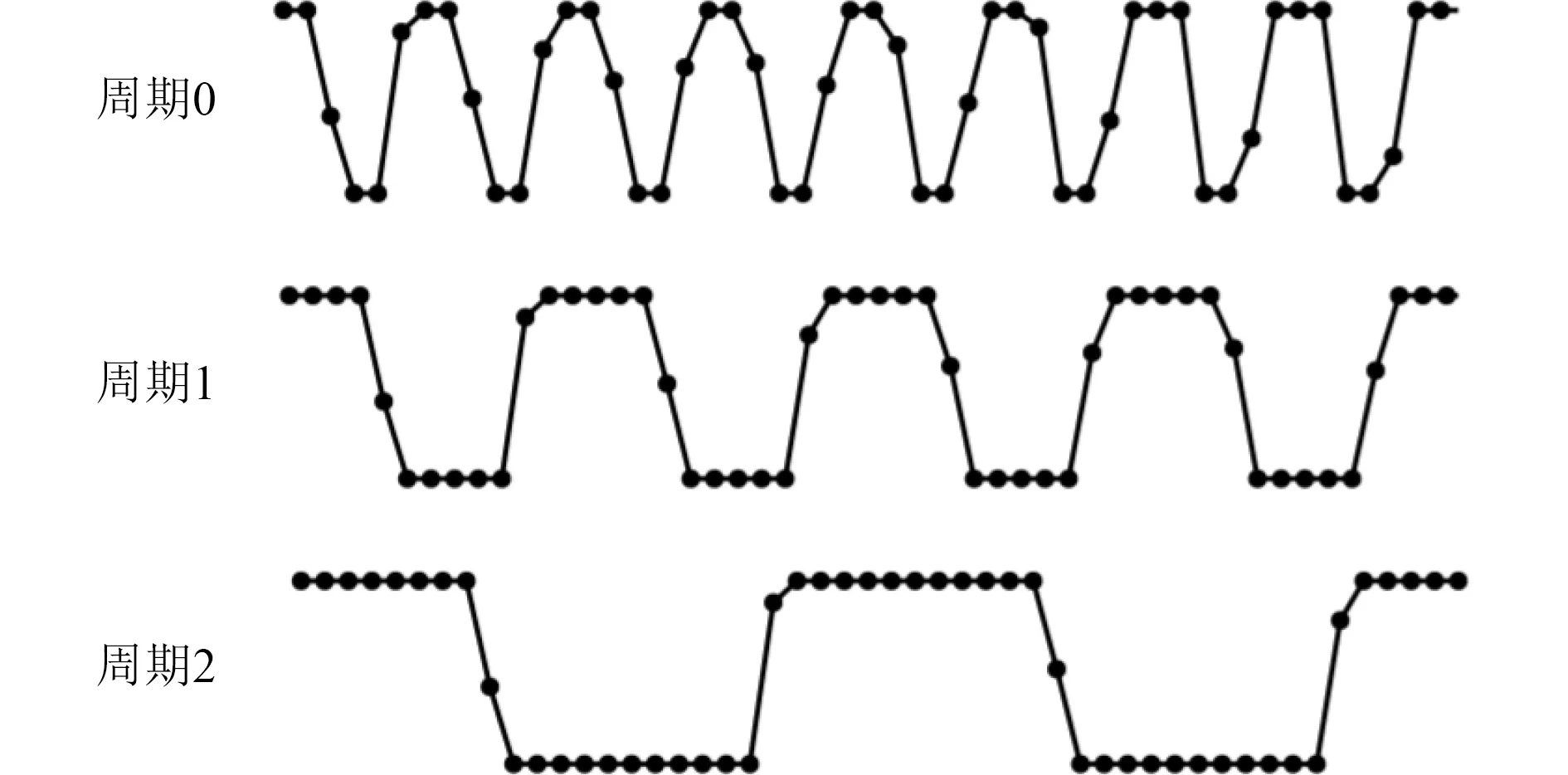
图5 雷达信号测试中数据速率控制实时采集图Fig. 5 Real time acquisition diagram of data rate control in radar signal test
量程选择。在信号处理系统中,通过改变扫描线数据可以改变量程,清除掉所有数据速率控制中产生的杂波,重新向系统传输新数据。该模块运行步骤如下:用户发出量程控制指令,对所有量程编码,根据量程指令信息输入编码状态,输出量程控制信息,达到自动调谐的目的。
调谐控制。在雷达天线系统中,利用调谐控制模块对天线本振频率进行调节,提高雷达信号回收质量。该模块主要通过调谐电压的方式对不同类型雷达天线进行控制,本文提出的雷达信号测试采用的电压为5~12 V,处理雷达信号时使用DA转换芯片,该芯片可以控制调谐电压,改变信息指令,满足多种状态下调谐控制需要。自动调谐控制的执行步骤如下:内嵌雷达信号质量自动检测模块,根据信号质量输出相应变量值,用于指示信号调谐;调用ROM存储器,编码值为DM62352,对应5~12 V电压,ROM存储器用于存储各类控制信息;读取任意取值范围内的地址变量信息,当信号达到最大值时,自动记录地址和量程信息;在显示控制中心保存和记录信息,完成自动调谐。
获取方位。借助雷达天线反馈的BP信号和HD信号确定测试目标的方位,天线角度根据测试项目而定。方波信号为200 Hz,天线旋转一周的指示信号为HD信号,旋转速度为25 r/min,每间隔2.4 s发出一次脉冲信号。采用脉冲计数法计算出天线旋转角度,当脉冲发射频率达到600 Hz最小值时,则难以分辨出方位角度,此时要利用均匀插值法量化角度信息,提高雷达系统信号测试的准确性。方位信息获取流程为:系统获取BP信号和HD信号后,判断信号是否出现明显抖动,对于小于50 M的脉冲信号而言,会直接影响变量记录结果;选取与BP信号相邻的2个信号作为脉冲使能,设置方位计数器变量,累加脉冲使能;清零处理HD信号接收过程中的方位计数器变量,处理完毕脉冲信号后,传输变量值信号到控制系统终端。
丢失检测。雷达信号测试的最后阶段为信号丢失检测,利用3个计数器获取方位信息、船艏信息和雷达回波信息,任意一个信号缺失都会直接反馈到控制系统中,计数器停止对此信息采集,并在终端显示界面给予警示。
2.2 雷达信号测试平台
船舶VTS雷达信号测试需建立测试平台,硬件平台包括信号处理板、雷达天线、显控终端软件。雷达信号系统中选用FURUNO天线系统,雷达上单元的频率为9 500 MHz,水平与垂直波束宽度分别为2.4°,27°,转速为25 rad/min,调谐电压为5~12 V。雷达天线与PC主机、直流电源连接,信号处理卡选用数模转换芯片,信号处理器为FPGA;软件平台采用FPGA软件开发,编写程序代码,借助网络调试助手测试网口接口,将雷达回波波形显示到控制终端。
2.3 测试结果分析
在控制显示屏幕上查看雷达信号处理结果,分析杂波抑制效果,具体测试结果包括:
在天线接口处,VIDEO用于发送视频信号,电压为0~5 V;HD表示船首信号,BP表示方位角度信号,TRIGGER表示脉冲触发信号,PLA和PLB表示脉宽控制信号。基于Quartus软件采集测试天线信号,用于验证天线接口数据获取是否正常。该软件自带逻辑分析模块,可以用于分析HD和BP信号。
天线接口测试。BP信号周期较短,HD信号绕雷达旋转一周,经历2.4 s,频率为200 MHz。在FPGA接收到视频回波信号之后,得出VIDEO信号测试结果,如图6所示。从图中可见,原始天线信号随着回波强度的增加而减弱,视频信号能够正常接收控制脉宽信号,实现FPGA与天线的交互操作。
图6 船舶VTS雷达信号中VIDEO信号的测试结果Fig. 6 Test results of video signal in ship VTS radar signal
网口测试。显示控制终端通过网口与FPGA连接,用于传输控制指令和信号。网口为独立模块,借助网络调试助手联通FPGA,可以测试网口信息传输是否正确。测试过程如下:向网口发送测试请求,IP地址为172.24.52.125,源端口和本地端口分别为7 776、7 777。在逻辑分析仪的支持下,实时采集FPGA发送的数据,在接收数据后可将信号传输到PC机终端。根据测试结果表明,网络数据传输正确,证明网口设计满足雷达信号探测要求。
在测试雷达信号控制系统时,要对比分析回波图像在同等条件下是否显示正常。借助FURUNO雷达平台调试显示状态,在1.5 Nm雷达平台上显示探测图像,根据测试结果表明,雷达信号算法能够有效协调控制系统平台运行。在调谐控制天线过程中,将抑制强度设置为0,以达到规避海浪等外界条件干扰测试结果的目的。测试量程为2 Nm,调谐设置为260,雷达图像可以通过手动调节增大,发现探测目标日趋饱满。当调谐增至450时,可以继续放大图像,再利用船舶VTS雷达信号平台对天线进行调节。
海杂波抑制测试。回波显示质量与海杂波抑制效果有关,通过雷达信号测试对海杂波的强度进行调节,分析抑制后的波形,可以提高回波图像的准确性。在一定环境下,杂波抑制强度达到0时,船舶VTS雷达信号无法识别目标。当抑制强度增至60时,能够对雷达扫描近距离区域内的杂波产生抑制作用,保留远距离的检测目标,由此表明STC曲线能够有效抑制海浪。在相同条件下,对比分析不同显示系统中的图像,利用雷达系统对比分析图像,证实海杂波具有良好的抑制效果。
目标识别测试。利用显示控制软件测试目标,用于验证目标功能是否处于正常运行状态,采用自主开发的显控系统,显示雷达扫描整体目标识别情况。雷达天线不存在测试目标时,在测试条件的影响下只用于对静态目标识别效果进行显示,目标识别效果优于其他目标。从某一局部放大后的图像可以看出,目标识别模块与图像显示的位置相同,能够满足测试要求。
3 结 语
船舶VTS雷达信号测试利用FPGA实现雷达信号算法,能够提高雷达信号处理实时性。雷达发射信号测试与分析要以掌握脉冲波雷达工作原理和信号发射特点为前提,引入距离测量和角度测量,综合考虑雷达信号特点,交互处理信号数据,利用网口传输VTS雷达信号,保证雷达信号处理的可靠性。
