基于数据挖掘的船舶虚拟驾驶效果评价
2022-10-18马大勇李安卓
马大勇,李安卓
(沈阳航空航天大学,辽宁 沈阳 110000)
0 引 言
海运行业的持续发展对于海员的适任提出更高要求,舰船虚拟驾驶系统的设计与研究能够训练海员的舰船驾驶技能,而舰船虚拟驾驶效果的评价对于舰船虚拟驾驶训练具有重要意义。
朱冰等在研究驾驶效果评价过程中,以自然驾驶数据为基础,构建自然驾驶数据的逻辑场景,采集驾驶数据,分析参数概率分布,获取评价结果。但该方法在实际应用过程中所使用的评价指标体系内包含大量冗余指标,导致最终评价结果存在一定偏差。赵晓华等构建柯氏层次评估模型,利用该模型评价驾驶效果,但该方法在实际应用过程中所得结果与实际需求具有显著的不匹配性。
基于此,研究基于数据挖掘的舰船虚拟驾驶效果评价方法,利用数据挖掘技术中的聚类算法与神经网络实现舰船虚拟驾驶效果评价,提升舰船驾驶的安全性。
1 舰船虚拟驾驶效果评价方法
1.1 舰船虚拟驾驶效果评价方法体系架构
图1为基于数据挖掘的舰船虚拟驾驶效果评价方法基本步骤。
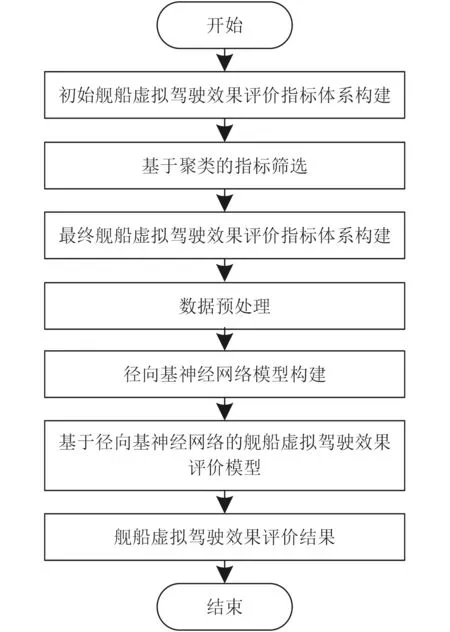
图1 基于数据挖掘的舰船虚拟驾驶效果评价方法基本步骤Fig. 1 Basic steps of ship virtual driving effect evaluation method based on data mining
依照系统性、层次性、简洁性、可量化、可对比等原则,选取初始评价指标构建初始舰船虚拟驾驶效果评价指标体系;采用数据挖掘技术中的聚类算法对初始指标体系内的指标进行筛选,清除重复指标,得到最终使用的舰船虚拟驾驶效果评价指标体系;采集评价指标相关数据,同时对所采集数据实施归一化与标准化等预处理。采用数据挖掘技术中的神经网络算法构建评价模型:构建径向基神经网络模型,采用粒子群优化算法训练神经网络,构建基于径向基神经网络的舰船虚拟驾驶效果评价模型,得到舰船虚拟驾驶效果评价结果。
1.2 基于聚类算法的评价指标体系构建
1.2.1 初始舰船虚拟驾驶效果评价指标体系构建
舰船虚拟驾驶过程中,以实现任意特定目标为目标,需要求操作者在操作舰船装置过程中动作的先后顺序准确,同时也要求操作的实际与幅度满足相关标准。上述要求并不具备严格标准,一般情况下,采用快、慢、多、少等较为模糊的度量关系表示虚拟驾驶的效果。基于上述分析将从不同组合操作中动作的准确性、驾驶行为衔接的连贯性、驾驶行为柔顺性、驾驶行为的效率等方面选取37个二级评价指标构建初始舰船虚拟驾驶效果评价指标体系。
1.2.2 基于聚类算法的评价指标筛选
采用数据挖掘技术中的R聚类算法对初始舰船虚拟驾驶效果评价指标体系内的评价指标进行筛选,清除重复指标,利用剩余的评价指标构建最终使用的舰船虚拟驾驶效果评价指标体系。基于聚类算法的评价指标筛选过程分为聚类分析与变异系数分析,前一部分对处于相同准则层内的评价指标实施分类处理,同时对不同类别内的评价指标实施非参数检验,令各类均能够描述舰船虚拟驾驶效果评价的不同方面;后一部分利用变异系数表征鉴别能力,通过确定相同类别内评价指标的变异系数,系数值越大说明其鉴别能力越强,越能代表类别信息,保留变异系数值最大的评价指标,清除剩余评价指标,由此既能够保障筛选后的评价指标体系可全方位覆盖舰船虚拟驾驶效果评价的不同方面,同时还能够确保有所差异对类内筛选出的评价指标所描述的信息为非重复信息。
聚类分析部分的主要过程如下:
1)利用R型聚类算法对不同准则层内所包含的评价指标进行分类处理,并确定不同类内指标的数量。选取离差平方和法对评价指标R型分层聚类,若任意准则层内所包含的评价指标数量为个,将全部个指标划分为个类别,由此可利用式(1)确定第类评价指标的离差平方和(=1,2,···,):

基于式 (1) 所获取的第类评价指标的离差平方和能够确定全部个类别的整体离差平方和,公式描述如下:

3)确定聚类数量。以防止聚类分析过程中给定条件下的主观任意性为目的,对聚类分析所获取的各类评价指标实施非参数K-W检验,分析的科学性。上述检验过程以各评价指标在数值特征上不具备明显差异性为基础。若不同类别的评价指标显著性等级Sig大于0.05,那么接受说明初始类别数量设定较为科学,也就是相同类评价指标之间不具备明显差异,聚类数量较为合适。相反,说明初始类别数量设定不科学,需在此实施聚类处理。变异系数分析部分的主要过程如下:
分析评价指标的变异系数就是确定评价指标分辨信息的水平,变异系数同任意评价指标在不同决策单元内的部分变异性之间呈正比例相关,即与评价指标的信息分辨能力之间呈正比例相关。变异系数较小的评价指标需清除。经由清除变异系数较小的评价指标,能够简化评价指标体系。利用下式计算第个评价指标的变异系数:

式中:b和h分别表示整体变异系数标准差和均值,其计算公式分别如下:
利用式(4)能够描述不同评价指标的标准化变异水平。通过上述处理过程后可简化初始舰船虚拟驾驶效果评价指标体系,得到最终使用的舰船虚拟驾驶效果评价指标体系,如表1所示。
1.3 舰船虚拟驾驶效果评价模型构建
采用数据挖掘技术中的径向基神经网络构建舰船虚拟驾驶效果评价模型。作为单隐层、前馈型神经网络,径向基神经网络的主要优势表现为分类性能好、可最大限度逼近任意非线性不间断函数。将评价指标体系内的评价指标输入径向基神经网络内,通过训练与学习过程获取舰船虚拟驾驶效果评价结果。径向基神经网络结构如图2所示。
利用式(6)能够获取径向基神经网络的输出:
式中:={,,}表示输入向量,即组合操作准确性、驾驶行为连贯性和驾驶行为柔顺性;w和η分别表示第个隐含层神经元同输出层神经元的连接权值和第个隐含层神经元的输出。
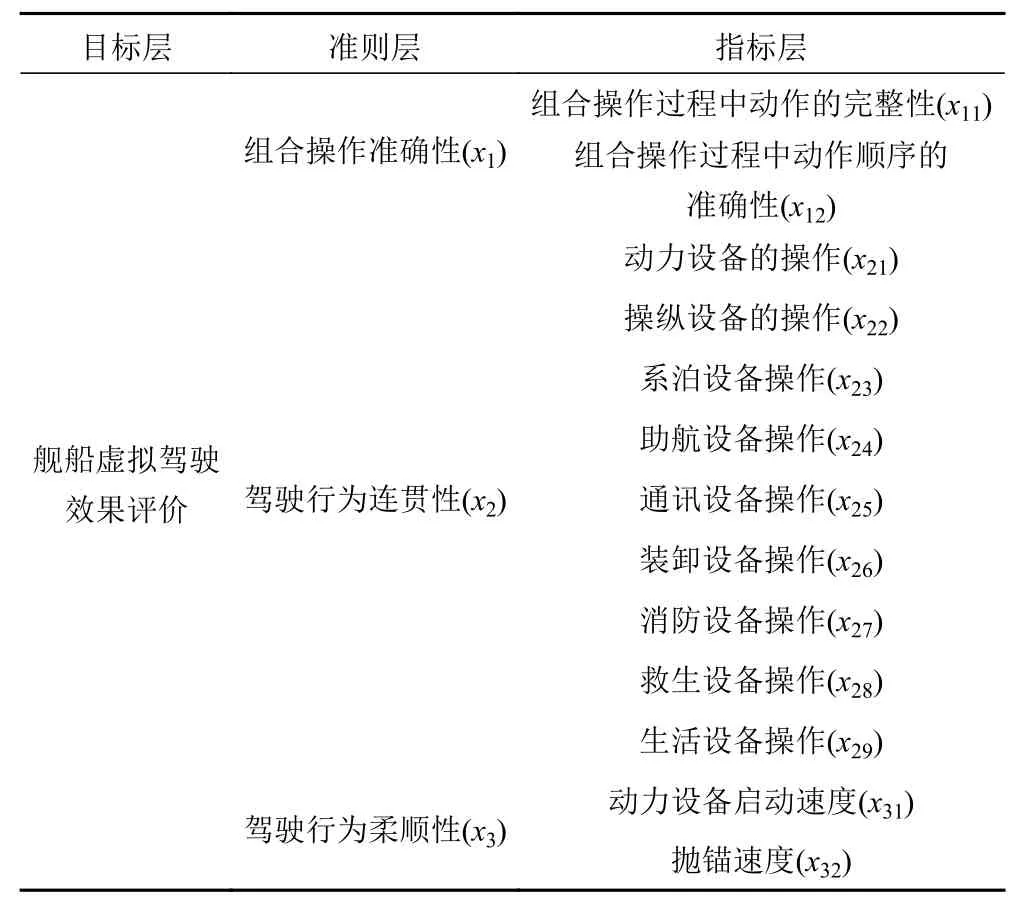
表1 舰船虚拟驾驶效果评价指标体系Tab. 1 Evaluation index system of ship virtual driving effect
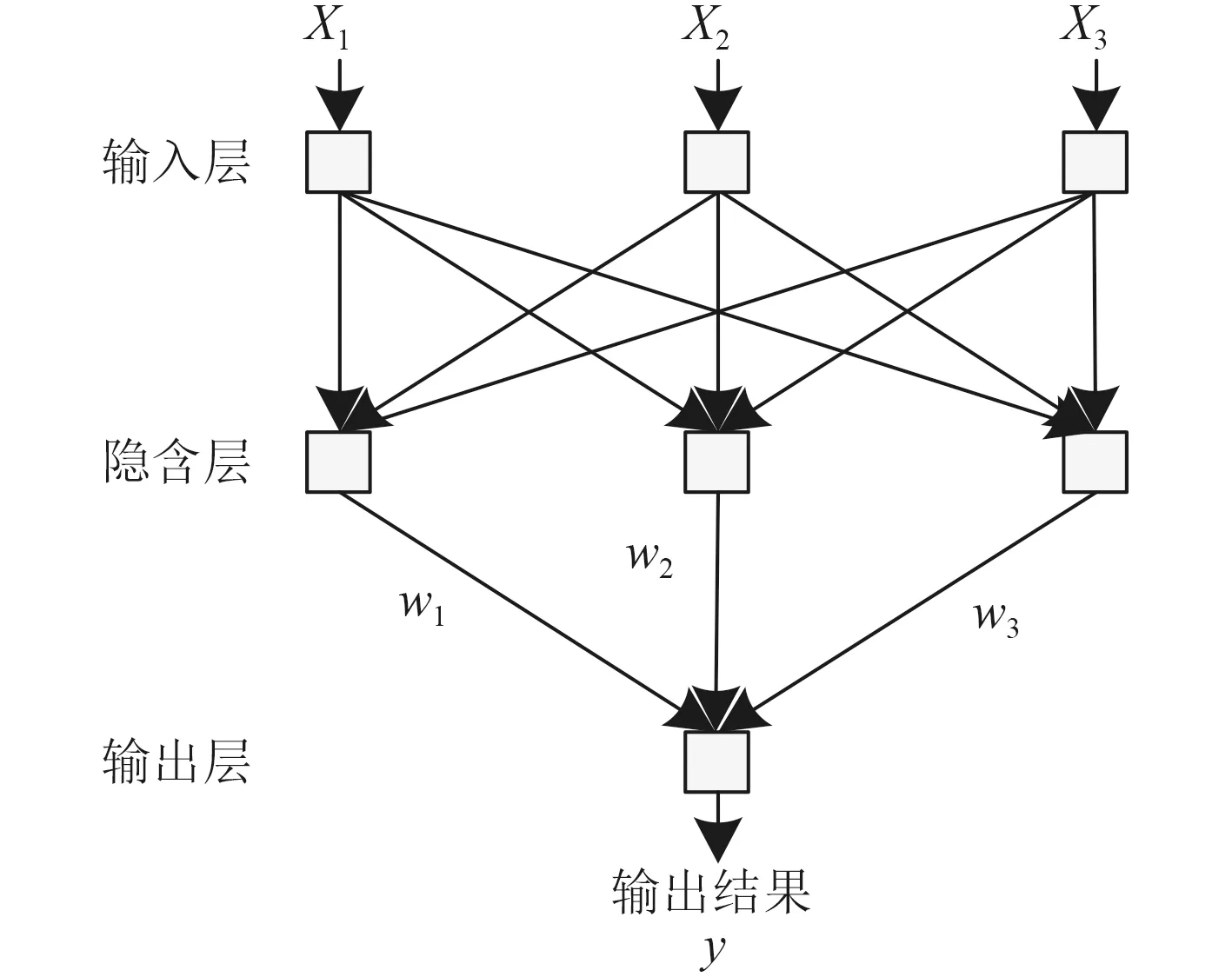
图2 径向基神经网络评价模型结构Fig. 2 Structure of RBF neural network evaluation model
式中,u和δ分别表示中心和方差。
隐含层内所包含的神经元数量通常依照问题的复杂度来计算,神经元数量同神经网络分类精度之间呈正比例相关;但神经元数量过大将造成神经网络训练效率下降,同时有较大概率产生拟合过度的问题。
2 实验结果与分析
2.1 评价指标体系构建的科学性分析
以数据方差描述评价指标信息含量的原理为基础,设定评价指标体系构建科学性的分析标准。
以和分别表示筛选后评价指标对海选评价指标的信息贡献率和评价指标数据的协方差矩阵,则

式中:表示迹;和分别表示筛选后评价指标数量和海选评价指标数量。
通过式(8)能够描述筛选后评价指标的整体方差与海选评价指标整体方差间的比值,由此能够获取筛选后评价指标所描述的海选指标信息。一般情况下,在筛选后指标能够体现90%以上的海选指标信息,即可说明筛选后的评价指标所构建的评价指标体系科学。
将本文方法筛选后评价指标的整体方差与海选37个评价指标的整体方差代入式(8),得到本文方法所构建的评价指标体系科学性分析结果,如图3所示。分析可知,对初始评价指标体系内的评价指标进行筛选后,当评价指标数量达到13个条件下,信息贡献率达到92%以上,由此说明本文方法所构建的评价指标体系具有较高科学性。虽然在评价指标数量持续提升的条件下,信息贡献率也有所提升,但评价指标体系的复杂度与冗余性也随之提升。
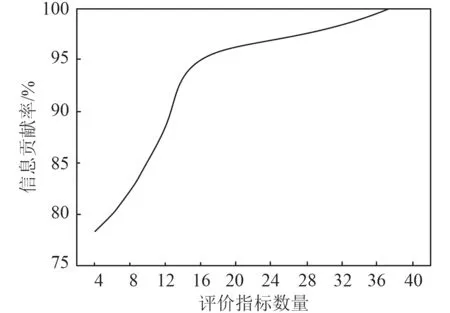
图3 评价指标体系科学性分析结果Fig. 3 Scientific analysis results of evaluation index system
2.2 径向基神经网络测试
图4为本文方法中所使用的径向基神经网络测试结果。分析可知,采用本文方法训练所得的径向基神经网络模型具有较高的评价精度,由此说明本文方法能够较好地评价舰船虚拟驾驶效果,满足实际评价所需的精度要求。
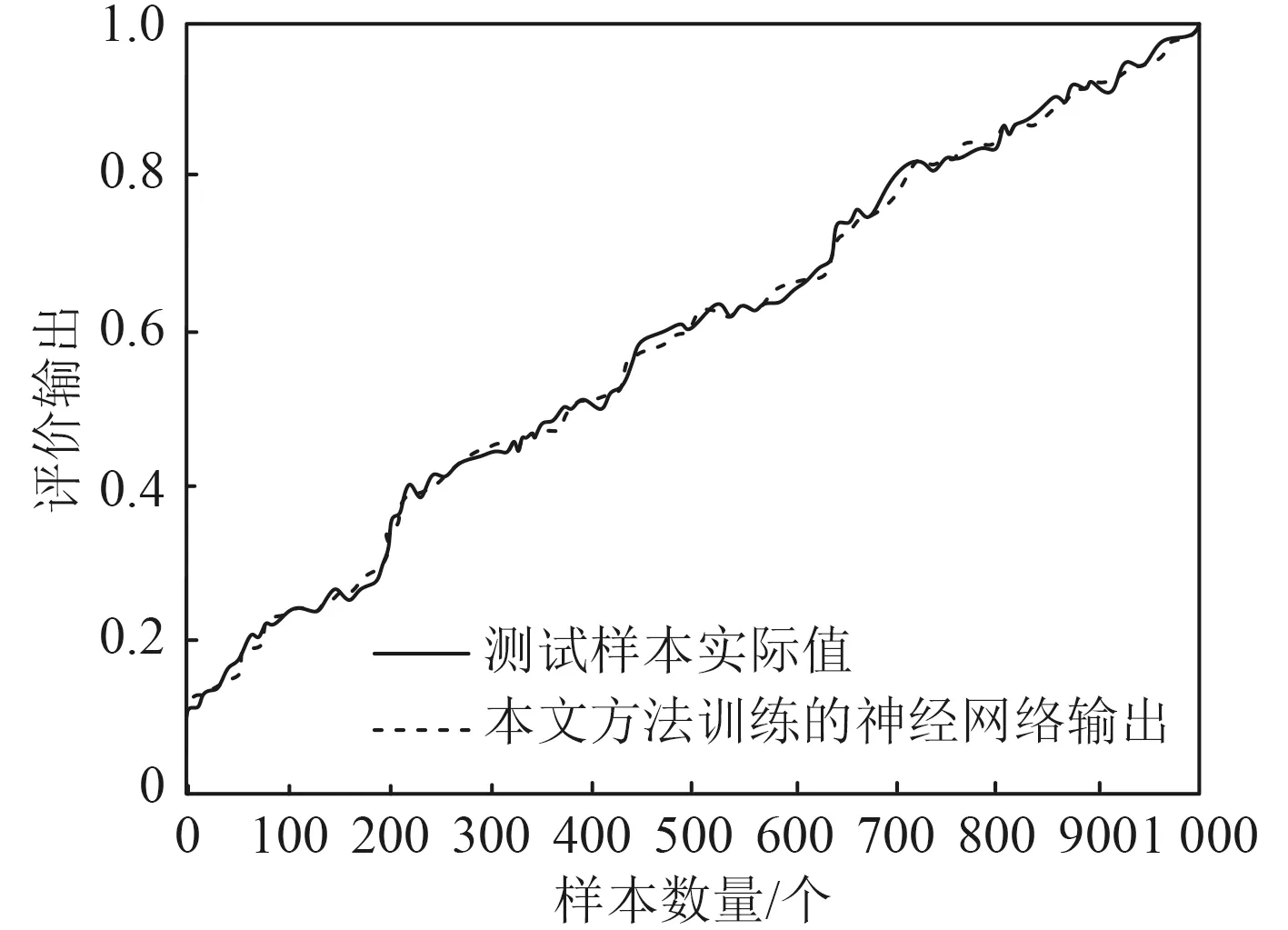
图4 径向基神经网络测试结果Fig. 4 Test results of radial basis function neural network
2.3 评价结果
将实验对象舰船虚拟驾驶效果划分为5个等级,分别是:好、较好、中等、较差、差。表2为本文方法对各实验对象的舰船虚拟驾驶效果评价结果。可知,采用本文方法能够有效对实验对象内的舰船虚拟驾驶效果进行评价,且本文方法结果与实验对象实际舰船虚拟驾驶效果一致,说明本文方法具有较好的评价精度。

表2 实验对象审计风险评估结果Tab. 2 Audit risk assessment results of experimental subjects
3 结 语
本文研究基于数据挖掘的舰船虚拟驾驶效果评价方法,采用数据挖掘技术中的聚类算法与神经网络分别筛选指标和构建评价模型,由此获取舰船虚拟驾驶效果评价结果。实验结果显示本文方法所构建的评价指标体系具有较高科学性,并且能够准确评价虚拟驾驶效果。
