三体风电运维船船桨耦合作用尾流场数值仿真研究
2022-10-18谢云平赵子健吴海红陈海健
谢云平,王 勇,赵子健,吴海红,陈海健
(江苏科技大学 船舶与海洋工程学院,江苏 镇江 212100)
0 引 言
我国幅员辽阔,拥有漫长的海岸线,风能资源可开发量十分可观,蕴含着巨大的潜力,5~55 m水深、70 m高度海上风电开发潜力约5×10kW,其中5~25 m水深风电开发潜力约1.9 ×10kW。近年来我国大力发展海上风电并取得了不俗的成绩,发展水平虽然距世界前二英德两国有一定距离,但是差距在逐年缩小。随着海上风电的不断发展,为了更好地满足风机运行维护的需要,对于风电运维船也提出了更高的要求,尤其是在安全性、快速性、舒适性等方面。针对这种情况,本文对几种侧体几何形状三体风电运维船方案,采用船桨耦合作用自航方法,进行尾部流场(伴流分数)数值仿真相关研究,以获得快速性能更好的侧体横剖线方案。
1 船、桨要素与模型
1.1 三体船主要要素与模型
三体风电运维船由1个主体和2个侧体构成,其主要参数见表1。基本模型如图1所示,三体船船模和实船比例为1∶10。
为了研究侧体横剖线形状对三体船尾部流场的影响,在基本模型的基础上,保持侧体要素、排水体积及浮心纵向位置不变的,参照文献[1],建立3个侧体形状不同的模型,分别为上U下V型、V型、缓和V型,将基本模型确定为方案1,其余模型分别命名为方案2、方案3、方案4。
1.2 螺旋桨要素与模型
三体风电运维船为双机双桨船。根据三体船的阻力性能(基本船模)和主机相关参数,利用MAU型桨图谱以及桨轴浸深资料,得到螺旋桨参数(见表2),为螺旋桨伸张面积,/为最佳盘面比,为螺旋桨螺距,为螺旋桨直径,/为螺距直径比。
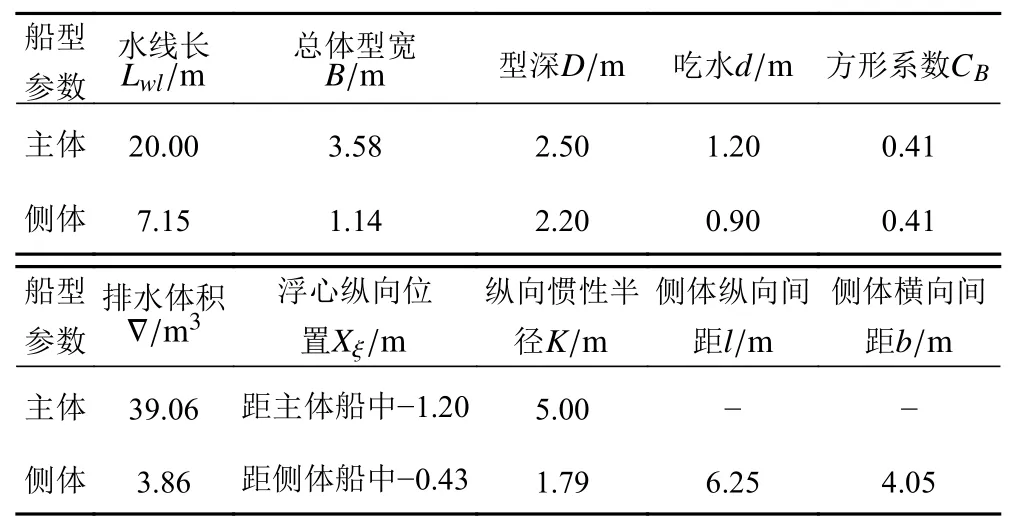
表1 三体风电运维船船型参数Tab. 1 Wind power maintenance trimaran data
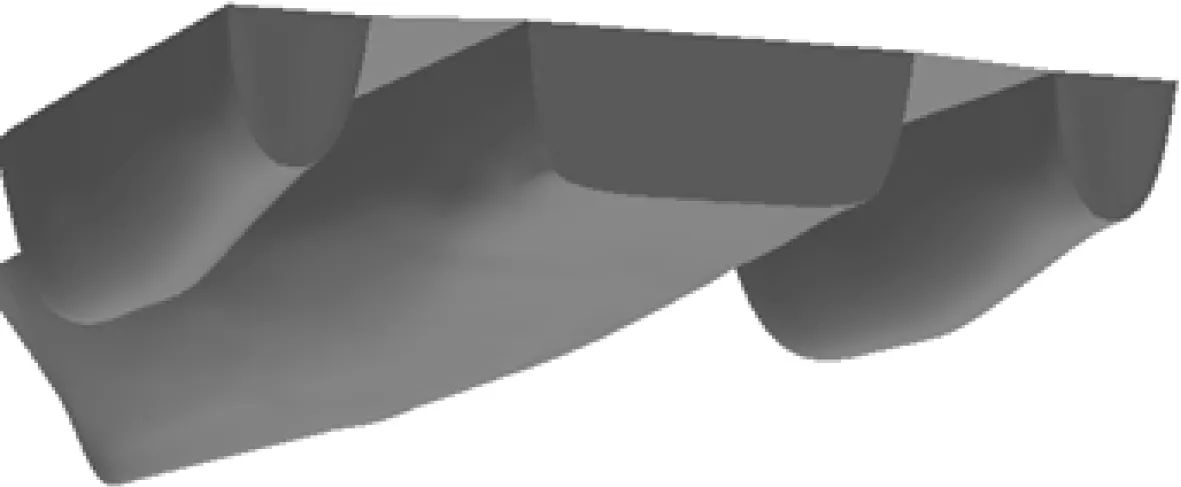
图1 基本模型一般视图Fig. 1 General view of the trimaran model
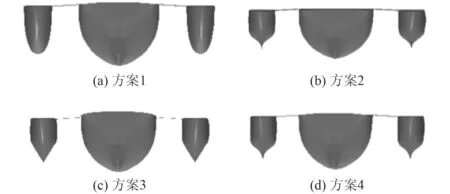
图2 各方案视图Fig. 2 Views of each scheme

表2 螺旋桨要素Tab. 2 Propeller elements
由确定的螺旋桨参数,根据螺旋桨叶切面型值,通过SolidWorks建立桨叶模型(见图3),并结合桨毂几何尺寸,形成螺旋桨模型(见图4)。
2 螺旋桨敞水性能数值仿真与分析
2.1 设定流体域
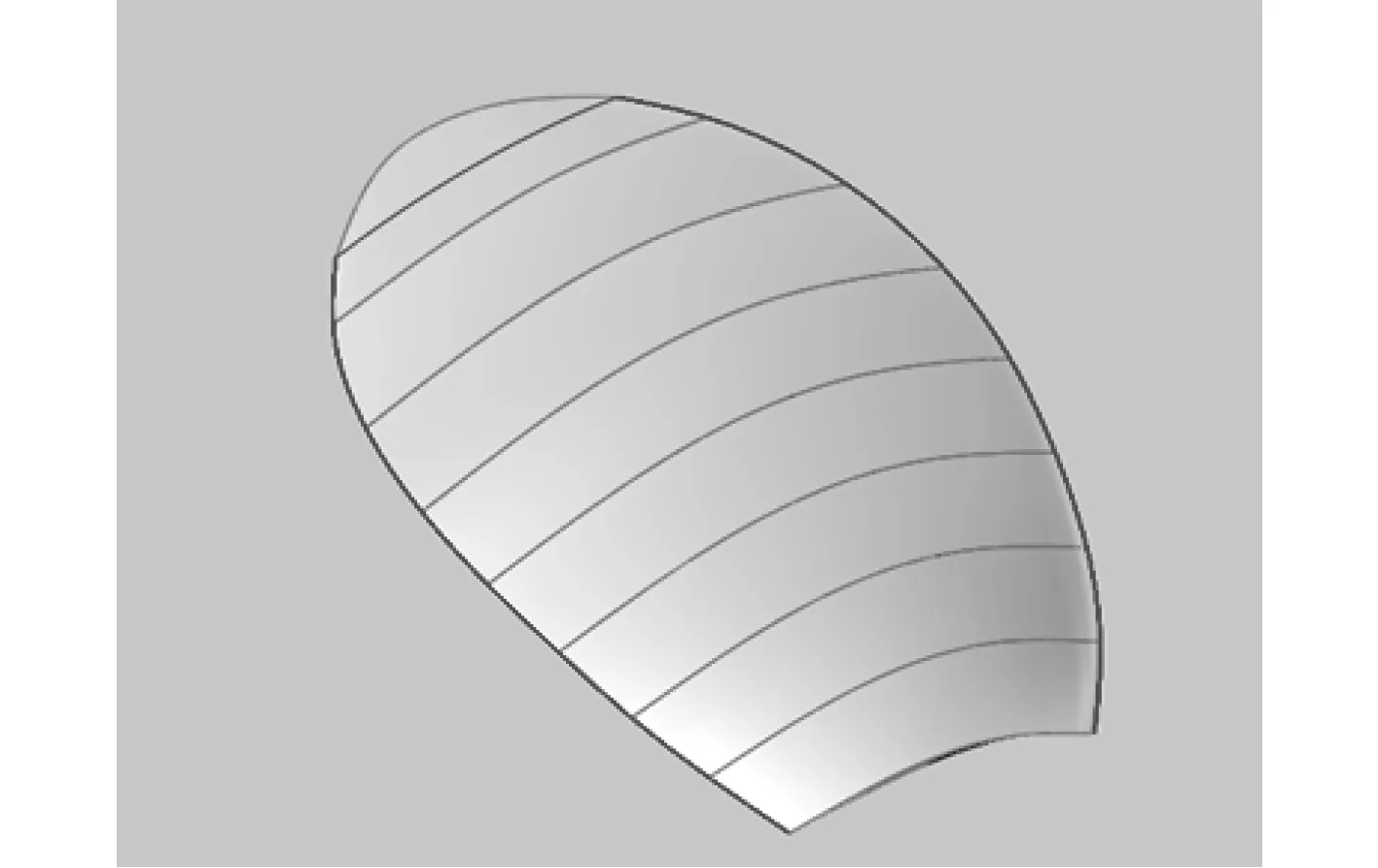
图3 桨叶模型Fig. 3 Model of propeller blades
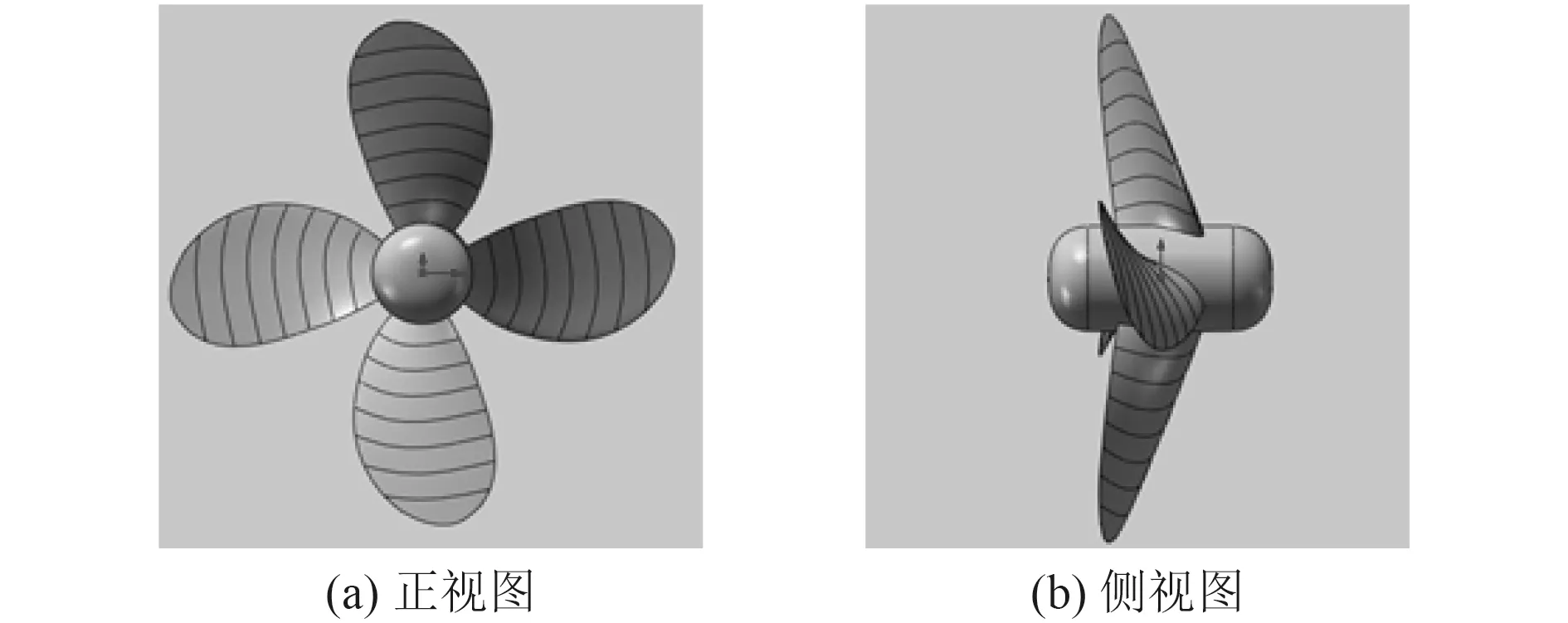
图4 螺旋桨模型Fig. 4 Model of propeller
螺旋桨敞水性能的计算有多种方法,本文选用CFD方法,利用STAR-CCM+软件对其进行计算。在进入STAR-CCM+软件后,将建立好的螺旋桨模型导入其中,导入完成后利用软件对模型进行检查,确保在检查过程中螺旋桨表面无杂乱线条,同时还要观察桨叶与桨毂连接处,保证该处没有黑色细线,螺旋桨模型满足较为光滑条件(见图5)。

图5 STAR-CCM+中的螺旋桨几何模型Fig. 5 Propeller geometric model in STAR-CCM +
螺旋桨性能受多种因素的影响,为了最大程度降低流场边界对其影响,将流域设置为一圆柱体区域,该圆柱体区域直径为9(螺旋桨直径),长度为14,在设置流域时应确保螺旋桨在圆柱体截面圆心,距离圆柱体上下底面均为7,将该圆柱体流域命名为圆柱1。完成圆柱1流域设置后新建圆柱2流体域,圆柱2流体域需将螺旋桨包括在内,要注意圆柱2横截面圆心应与圆柱1横截面圆心相同。设置好的流体域如图6所示。
2.2 划分网格

图6 流体域Fig. 6 Fluid domain
在对螺旋桨进行网格划分时,需要特别注意静流域和旋转域。在进行计算时,旋转域十分重要,所以对该区域要进行网格加密,而静流域的网格密度可以相对稀疏,因为其重要性较低,这样设置的目的是保证计算精度,同时降低计算所需要的时间。在对静流域网格进行设置时,将基本尺寸设置为0.1 m,棱柱层数设为3层。完成上述操作后,还要对静流域圆柱进行额外操作,对其添加自定义控制,取目标表面尺寸和最小表面尺寸的基数百分比为500。在旋转域网格进行设置时,可以参照静流域网格的基本尺寸,取为0.1 m,棱柱层也设置为3层,平均值为40。需添加2个对旋转域圆柱的自定义控制,控制旋转域圆柱需要注意目标表面尺寸和最小表面尺寸之间的基数百分比,将其设置为200,除此之外对于计算区域也要适当对其进行加密;同样对于控制螺旋桨模型,螺旋桨桨叶也要进行网格加密,需要注意的是桨叶的旋转曲面,因为其结构特性导致在对其进行网格划分时更为复杂,该区域是重点区域,在对螺旋桨进行网格划分时需要格外关注。在对桨叶节点进行设置时也需要注意,将边界增长率设置为快,表面曲率设置为72,表面尺寸2个节点取基数百分比为5。最后还要对叶片边缘进行加密,取表面尺寸基数百分比为2。在完成网格划分后,对网格进行初始化即可生成网格,如图7所示。
2.3 边界条件
在完成网格划分生成体网格后,在接下来的一系列设置中分别对应选择三维、隐式不定长、液体、分离流、恒密度、湍流、-Epsilon湍流,设置好后关闭连续体。还要分别设置速度出口与速度入口,速度出口选取正对桨叶方向的圆面,相应的将正对叶背方向设为速度入口,对称平面则选择圆柱面。完成上述操作后新建运动-旋转,确定坐标系的原点,轴方向的确定则需要依靠右手定则,此外还要设置旋转速率。在完成相关设置之后,想要使得螺旋桨转动,还要完成一项关键步骤,即在旋转区域中将物理值-运动规范选择为旋转。

图7 螺旋桨与流体域网格Fig. 7 Propeller and fluid domain grids
2.4 敞水性能数值仿真结果与分析
首先完成预先设置场函数,而后新建各报告表达式,最后选中上述报告,完成上述操作后创建监视器和绘图。选择合适的迭代频率十分重要,迭代频率设置为500,初始化求解后运行该模拟,即可得到图8和图9的数值模拟结果。
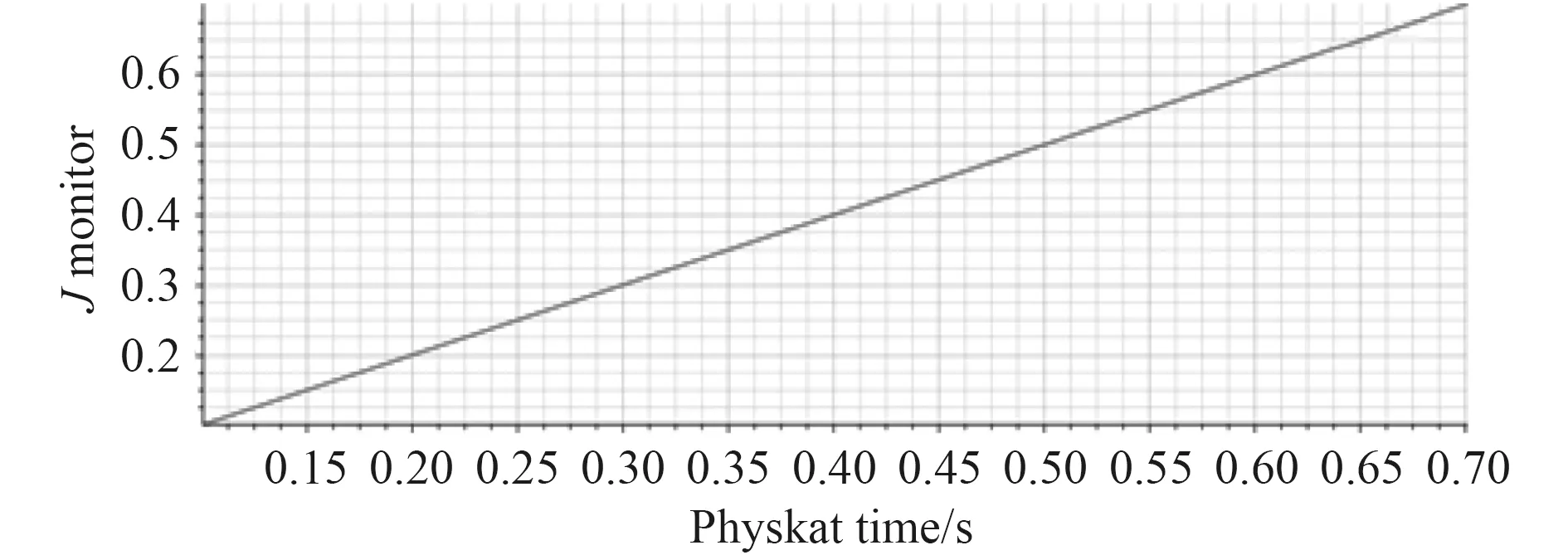
图8 进速系数绘图Fig. 8 Drawing of advance coefficient
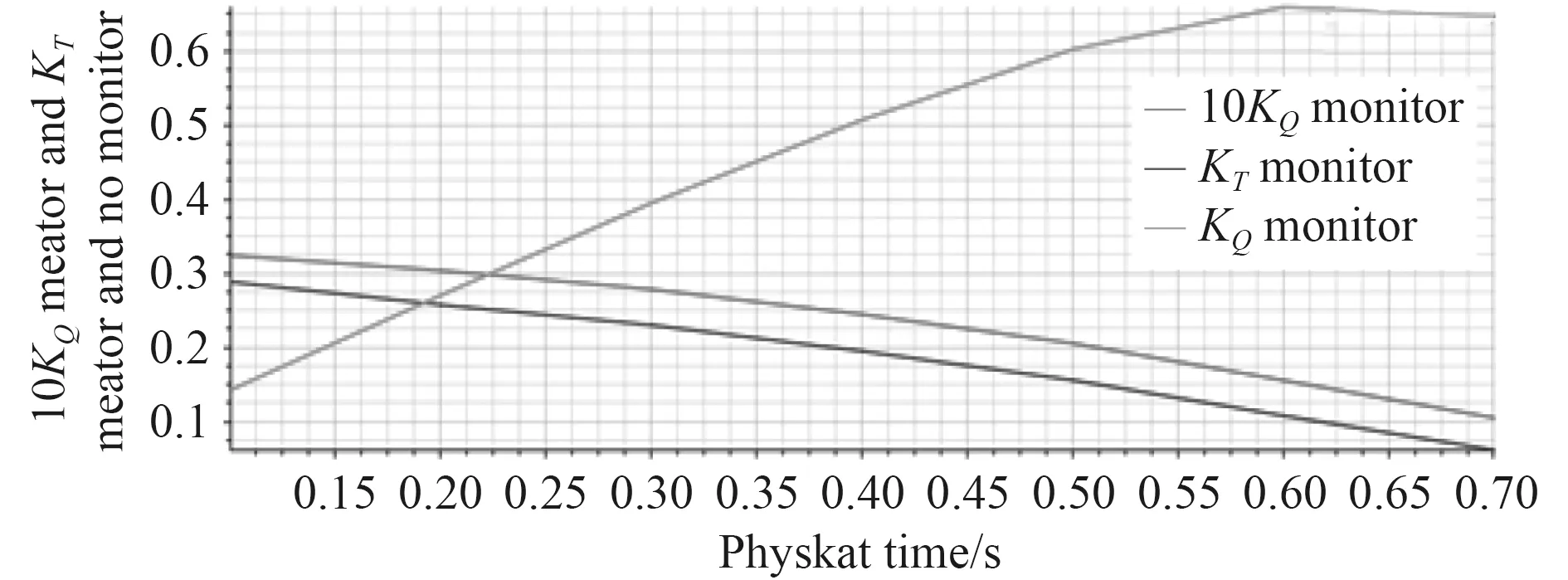
图9 敞水系数总图Fig. 9 General chart of open water coefficient

可知,对于螺旋桨敞水性能数值仿真采用的CFD方法可行、有效。该方法较好地模拟螺旋桨敞水试验,得到了螺旋桨的敞水性能,为尾流场的数值仿真做了良好的铺垫。
3 尾流场数值仿真及分析
3.1 伴流及其获得方法
在船舶行进的过程中,螺旋桨与船体相互影响。螺旋桨工作时因转动产生的速度场与船舶航行产生的速度场会相互干扰,从而造成螺旋桨进速不等于船速。二者之间关系可表示为:
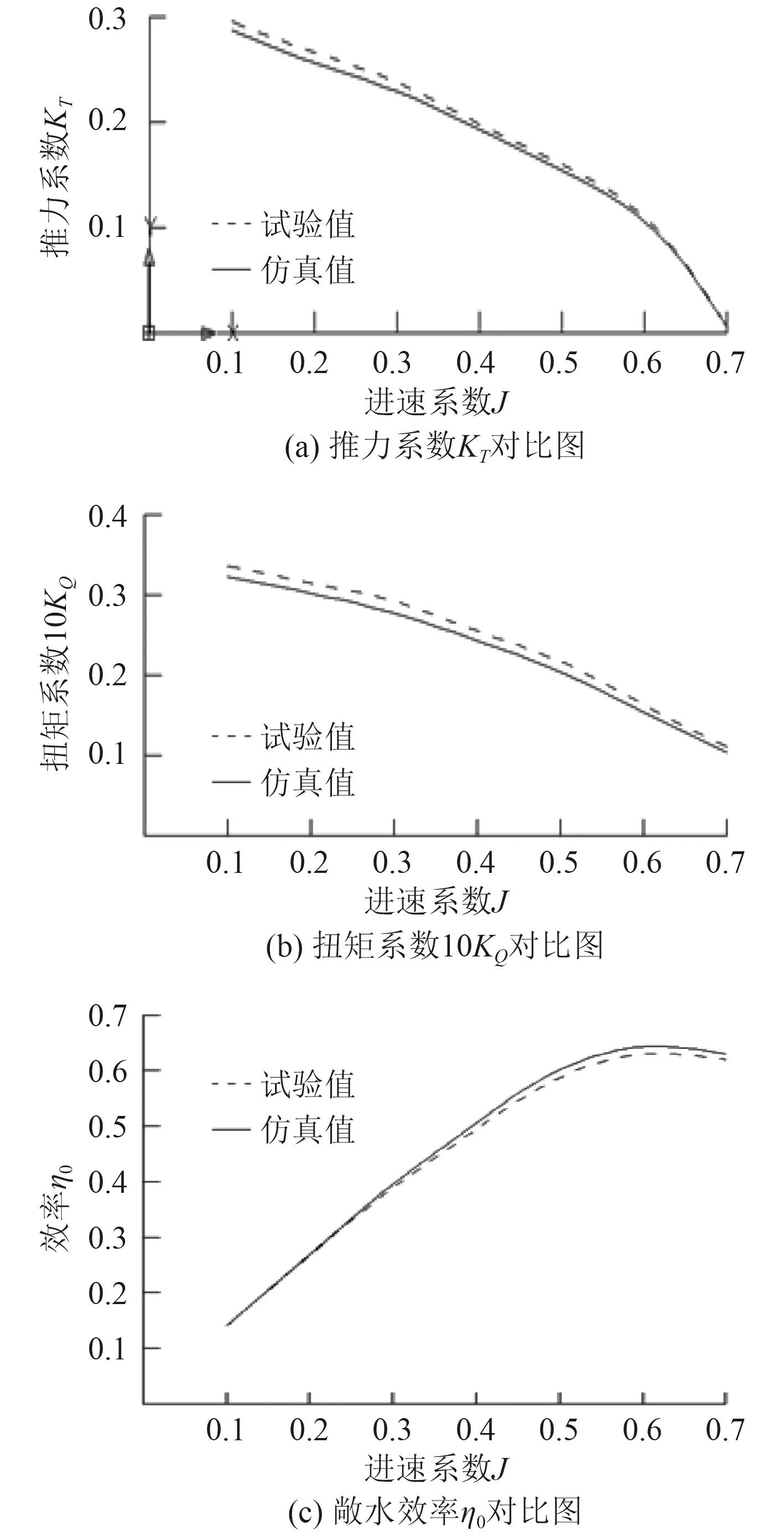
图10 敞水仿真数值对比图Fig. 10 Open water simulation data comparison chart

式中:V为螺旋桨进速,ω为伴流分数,为船速。
船后伴流的速度场十分复杂,主要表现为其在螺旋桨盘面处各点的速度大小和速度方向都不相同,一般将伴流速度场分为相对于螺旋桨的轴向速度、周向速度和径向速。由于轴向伴流速度数值上要比周向伴流速度和径向伴流速度大得多,所以一般提到的伴流实际上是指轴向伴流。
伴流的数值多采取试验法获得,根据不同的测量方法可以将其分为标称伴流和实效伴流。由船模自航试验测得的伴流分数最为可靠,但考虑到时间及成本因素,在进行螺旋桨设计时往往利用经验公式来估算,而估算的误差势必对船、机、桨的匹配带来一些影响。为此,利用船模、桨模来进行船后尾流场(伴流)的数值模拟显得较为高效、经济。
3.2 三体风电运维船尾流场数值仿真及分析
3.2.1 建立船体-螺旋桨模型
利用SolidWorks软件将螺旋桨安装至方案一模型船艉,安装完成后进行接缝检查,确保模型光顺后导出该模型iges文件,将iges文件导入到软件STAR-CCM+中,如图11和图12所示。
图11 方案1船体-螺旋桨模型Fig. 11 Scheme 1 ship - propeller model

图12 方案1船体-螺旋桨模型后视图Fig. 12 Scheme 1 hull - propeller model back view
3.2.2 控制域和网格划分
在将船体-螺旋桨模型导入软件后,接下来要进行控制域的确定以完成后续计算。在空间位置上,螺旋桨进行敞水系数计算划分的圆柱形控制域被三体船模型阻力仿真的矩形控制域包裹,故对尾流场进行数值仿真的控制域与矩形控制域相同,对自由液面和船体的加密区域也参照进行阻力仿真时的设置,由于船体-螺旋桨模型新增了螺旋桨部分,需要对新增加的螺旋桨部分进行加密。最终网格划分如图13和图14所示,总网格数为130万左右。
3.2.3 相关设置及计算结果
计算时将整个流域分为船体和螺旋桨2个部分,利用CFD软件结合随体网格技术还有自航宏文件可以实现船舶自航的数值模拟。首先要确定目标速度V,目标速度确定后可以计算得到该速度下的船体摩擦阻力修正值,对船体-螺旋桨模型施加强制力,在目标速度下进行自航模拟。在模拟过程中,船体-螺旋桨模型受到螺旋桨产生的推力、施加的强制力以及船体阻力,根据受力情况调整螺旋桨转速,达到螺旋桨推力=R-的平衡状态,仿真得到方案一的自由液面兴波图(见图15),其波形符合凯尔文波系形状。

图13 方案1自航网格划分Fig. 13 Scheme 1 self-propelled grid division
图14 方案1船体-螺旋桨模型侧视图网格Fig. 14 Scheme 1 side view grid of hull - propeller model
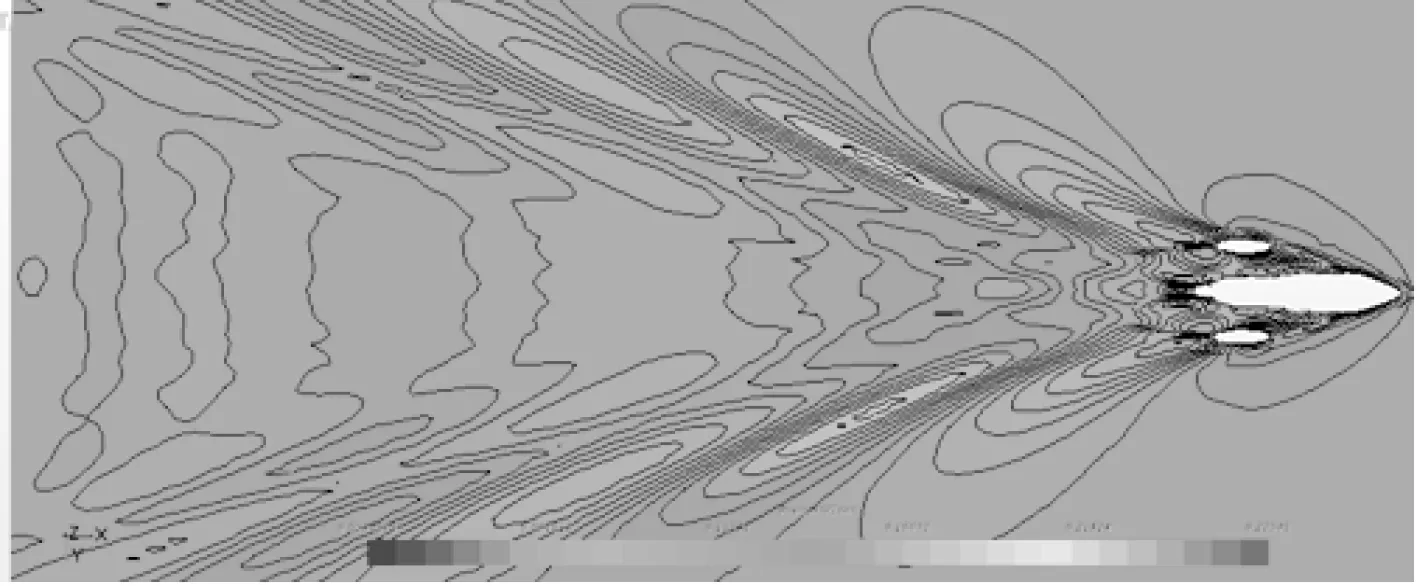
图15 自由液面兴波图Fig. 15 Free surface wave chart
在上述各方案中,同一方案中的2个螺旋桨完全相同,本文仅取左桨伴流场,图16为其在/=0.5,/=0.6和/=0.7处的轴向速度场。
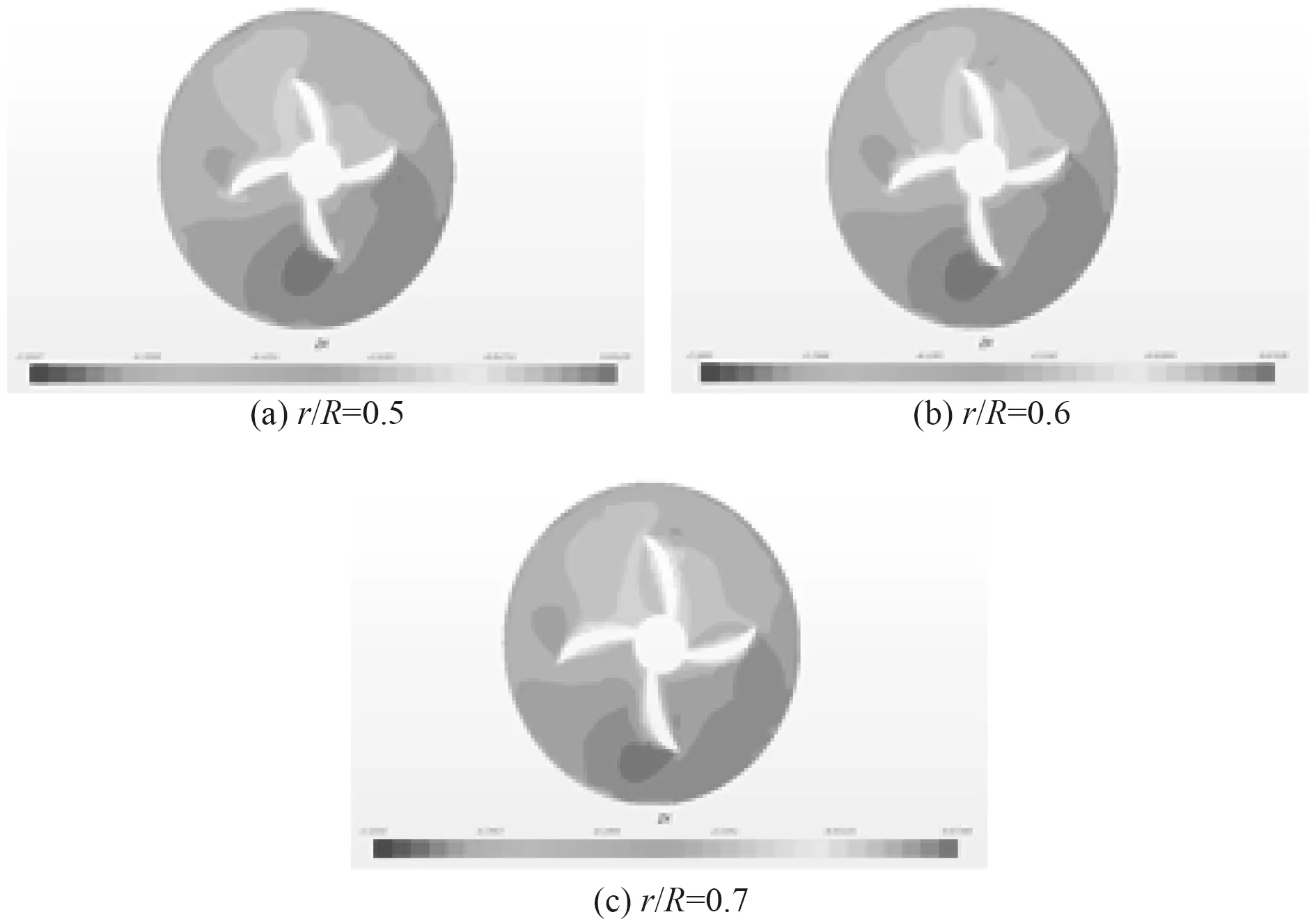
图16 方案1轴向速度场Fig. 16 Scheme 1 axial velocity field
根据仿真结果可得方案1在船体-螺旋桨模型速度为3.09 m/s时螺旋桨转速为42.7 r/s。根据数值模拟结果所得的船模阻力,螺旋桨转速,螺旋桨推力等,通过与螺旋桨敞水试验仿真结果比较分析,可以得到方案1伴流分数0.064,利用伴流分数的近似公式计算值为0.06,仿真分析值与计算值误差为6.67%,结果较为可靠,其余各方案伴流分数采取和方案1相同方法求得,具体数值见表3。
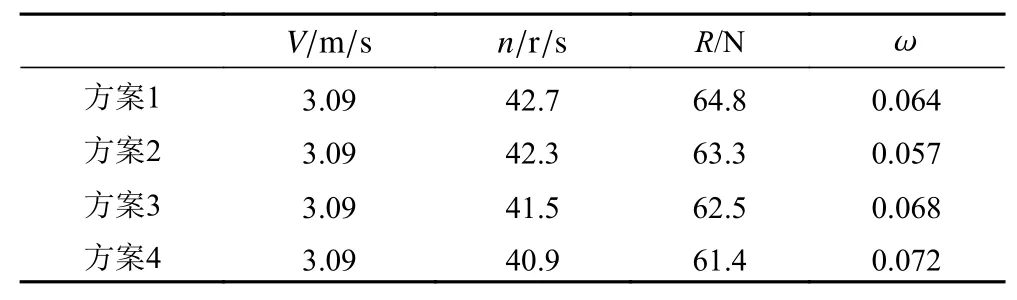
表3 各方案伴流分数值Tab. 3 The wake fraction values of each scheme
4 结 语
通过对4个侧体几何形状不同的三体风电运维船与螺旋桨组合模型方案进行自航试验模拟,并与螺旋桨敞水试验结果比较分析,可以得到以下结论:
1)螺旋桨敞水性能仿真结果较为可靠,仿真方法可行、有效。
2)通过自航模拟与螺旋桨敞水试验模拟结果分析确定伴流分数可行。
3)方案4螺旋桨转速最小,船体-螺旋桨模型阻力最小,同时各方案伴流分数相差不大,经综合考虑方案4为最佳方案。
