多源激励下坦克行进间火炮身管动态弯曲问题研究
2022-10-17杨国来刘金锋周宏根
陈 宇, 杨国来, 刘金锋, 周宏根
(1.江苏科技大学 机械工程学院,江苏 镇江 212100; 2.南京理工大学 机械工程学院,南京 210094)
作为弹丸膛内运动的导轨,火炮身管决定着弹丸出炮口时的运动状态,其精度是影响火炮射击精度的主要因素之一[1-2]。但身管是由前后衬瓦支撑的类悬臂梁结构,由于自重及加工误差等原因,其不可避免地存在静弯曲,弯曲后的身管,炮膛实际轴线与预期轴线并不重合,必然会改变弹丸的预期出射方向。因此研究身管的弯曲规律,减小其对射击精度的影响一直是相关科研人员的研究热点[3-5]。基于此,杨璐等[6]、孔刚鹏等[7]分别基于光电检测技术和激光测量技术提出了静态条件下火炮身管弯曲量的测量方法,通过实测数据为修正身管静弯曲对射击精度的影响提供参考。
但火炮发射时身管的动态弯曲是由自重、热作用、弹炮耦合、发射载荷等多源因素引起的复杂非线性运动。汤劲松等[8]、何忠波等[9]分别基于有限元法,建立了身管热力耦合有限元模型,分析热作用对身管弯曲状态的影响;丁树奎等[10]、孙玉杰等[11]则分别研究了弹炮耦合、发射载荷等对身管弯曲状态的影响。以上研究大都针对静止条件下射击的火炮,但坦克炮、自行火炮等车载武器系统需要具备行进间射击的能力。并且,现代车载武器系统的机动能力和使用条件均发生了较大变化,随着机动速度的提高及行驶路面条件趋于恶劣,系统所受地面激励急剧增大,严重影响车载武器行进间射击精度。已有研究表明,路面随机激励引起的车体基础振动是制约坦克炮和自行火炮射击精度的关键[12-13]。在此条件下,身管的动态弯曲情况必定也与静止条件下大不相同。如还采用原先的静态修正法,势必影响射击精度及首发命中率。因此,研究路面随机激励和弹炮接触力等多源激励下火炮身管动态弯曲问题必要而紧迫。
基于此,本文以某型号坦克炮为研究对象,综合考虑路面随机激励和弹炮耦合因素对坦克炮身管动态弯曲的影响,基于动态联合仿真方法及改进的L-N接触碰撞算法,建立了坦克行进间机电液耦合动力学模型,计算并分析了不同行驶工况条件下坦克行进间射击过程中的身管动态弯曲问题,以期为提高坦克行进间射击精度提供参考。
1 坦克行进间动力学建模
1.1 路面不平度建模
坦克行驶过程中,路面对左右履带的激励,最终会传递给火炮主体,造成身管的振动,因此坦克行进间动力学建模的要点之一是准确重构路面不平度。路面不平度是指道路表面相对已知理想基准平面的偏离程度,可通过路面功率谱密度描述其统计特性,并被按路面功率谱密度分为A、B、C等8个等级。本文选择采用谐波叠加法基于MATLAB软件编写路面不平度计算程序,分别重构了长200 m、宽5 m的B级、D级和F级三维路面不平度模型。基于谐波叠加法的随机路面模型已经得到验证[14],其可表示为
(1)
(2)
式中:q为路面高程;x为顺着路面方向上的位移;y为垂直于路面方向上的位移;N为路面空间频率被划分的区间数;Ai为中心频率ni对应的谐波的振动幅值;αy为考虑左右履带相干性的修正系数;αi、αn为[0,1]上均匀分布的随机数。
1.2 弹炮刚柔耦合接触模型[15]
坦克炮身管为长径比很大的梁状薄壁空心圆柱体,其精度受弹性变形因素影响较大。本文在Hypermesh中采用8节点六面体等参单元对身管进行有限元离散。基于FFlex方法在RecurDyn中生成身管的有限元柔性体模型,并通过后端面界面节点与炮尾固定连接,以确定其边界条件。选定身管内壁单元为接触区域,通过在身管和弹丸间定义接触(contact)并将基于L-N模型改进的法向接触力计算模型及接触摩擦模型嵌入到RecurDyn中,实现弹丸与柔性身管间含微小间隙接触碰撞关系的定义。其中,弹炮间法向接触力计算模型主要包括代表碰撞过程的弹性变形力项和阻尼力项,可表示为
(3)
(4)

(5)

弹炮间接触摩擦模型可表示为
(6)
式中:Fmax为定义的最大摩擦力;μ(vt)为摩擦因数,其与相对速度相关,可根据半正矢阶跃函数HAVSIN确定相对速度对应的摩擦因数,取决于静态门槛速度vs、动态门槛速度vd、静摩擦因数μs和动摩擦因数μd。
本文基于C语言编译弹炮间接触碰撞力计算子程序,并生成动态链接库(dll)文件,供RecurDyn求解器在数值求解过程中实时调用。计算时,RecurDyn求解器通过接触搜索算法判别接触点位置及接触点的弹性变形量,实时调用编写的弹炮间接触碰撞力计算子程序,实现对弹炮间法向接触力及切向摩擦力的计算。
1.3 机电液耦合建模
在RecurDyn中将坦克系统简化为多体系统,如图1所示。除身管外,所有构件均简化为刚体,并根据图1中所示约束连接。此外,分别在Amesim软件中建立稳定器电液位置伺服系统模型,在Simulink软件中建立PID控制系统模型,根据坦克系统仿真原理耦合建立坦克行进间机电液耦合动力学模型,如图2所示。

图1 坦克系统拓扑结构图Fig.1 Schematic diagram of the tank structure

图2 坦克系统仿真原理图Fig.2 Simulation schematic diagram of tank system
2 数值计算与分析
坦克行进间摇架高低角位移曲线(D级路面、20 km/h、0°瞄准角),如图3所示。由图3可知,在不考虑稳定器控制作用时,摇架处高低向振动幅值的最大值为18.57 mrad,而考虑稳定器控制作用后,摇架高低角位移得到了有效控制,其最大振动幅值显著减小至4.71 mrad,最终能够保证垂向稳定精度约为1.08 mrad。因此,坦克稳定器对坦克行进间振动状态的影响巨大,在分析身管动态弯曲时,理应考虑稳定器的影响。
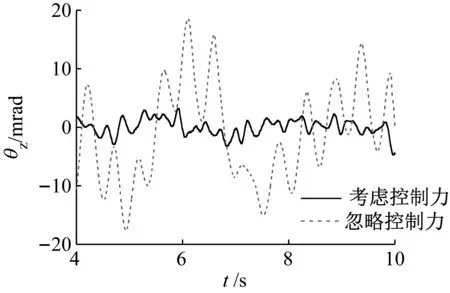
图3 坦克行进间摇架高低角位移Fig.3 The cradle elevation angular displacement of the moving tank
坦克行进间射击过程中,身管动态弯曲运动是由身管自重、路面激励、弹炮耦合作用、后坐复进运动、火药燃气的波尔登效应及弹丸质量偏心等多种因素耦合作用造成的复杂的弹性变形运动,本文主要对身管自重、路面激励和弹炮耦合作用三种影响因素进行研究。坦克在D级路面以20 km时速行驶条件下弹丸膛内运动时期炮口垂向位移图,如图4所示。由图4可知,考虑弹炮耦合作用前后,炮口垂向位移差异较小,这是因为弹丸质量相较于火炮质量而言很小,根据动量守恒定理,弹丸与身管间的接触碰撞并不会造成火炮运动状态的大幅改变。显然,弹炮耦合作用造成的身管弯曲在身管总体弯曲中所占成分较小,其并不是造成坦克行进间射击过程中身管动态弯曲的主要因素。
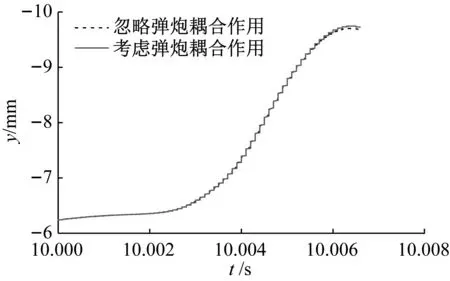
图4 弹丸膛内运动时期炮口垂向位移图Fig.4 The vertical muzzle displacement during the projectile in-bore motion
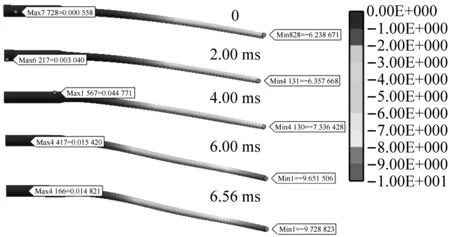
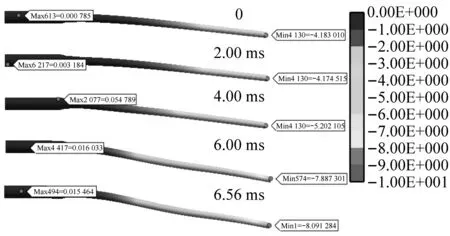
因此,本文主要分析身管自重和路面激励因素对坦克行进间身管弯曲状态的影响,其中,身管自重会使身管向下弯曲,而路面激励会使身管在平衡位置附近振动。不同行驶工况条件下,坦克行进间射击弹丸膛内运动时期身管垂向弯曲状态图,如图5所示。为了在图中直观表现身管的动态弯曲状态,以身管末端界面节点为参考点,以身管上其它单元节点相较于参考点垂向位移的100倍来表征身管的弯曲状态。由图5可知,在弹丸膛内运动时期,身管弯曲运动会沿着身管向炮口传递,虽然各种行驶工况条件下,身管的弯曲运动状态并不相同,但弯曲运动都不甚激烈,且身管在整体趋势上都表现为自重影响下的向下弯曲,这与常识相匹配。经数值计算可知,身管静挠度约为-8.21 mm,其可近似看作身管的静平衡位置。当路面状态较好且行驶速度较低时,坦克行进间地面激励相对较小,此时,身管自重是造成身管弯曲的主要因素,身管会在静平衡位置附近轻微抖动。弹丸膛内运动时期,炮口垂向位移在-6.24 mm~-9.73 mm之间变化(见图5(a))。随着行驶速度的提高或路面不平度的增大,坦克行进间受到的地面激励逐渐增大,经摇架衬瓦传递至身管上,造成身管的振动幅度逐渐增大,逐渐偏离平衡位置。炮口垂向位移虽还在静平衡位置附近振动,但明显更加偏离静平衡位置(见图5(b)~图5(e))。然而身管表现为如波浪状的弯曲状态,其振动非常激烈(见图5(f))。此时,地面激励成为影响身管弯曲状态的主要因素,激起了身管的高频振动,而由身管自重造成的向下弯曲逐渐被淹没在其它振动中。
(a) 20 km/h、D级路面

(b) 20 km/h、F级路面
(c) 30 km/h、D级路面
(d) 30 km/h、F级路面

(e) 40 km/h、D级路面
(f) 40 km/h、F级路面图5 弹丸膛内运动时期身管垂向弯曲状态图(变形量放大100倍)(mm)Fig.5 The barrel bending states in the vertical direction during the projectile in-bore motion (deformation magnified by 100 times) (mm)
路面不平度激励是坦克行进间火炮受迫振动的主要激励源。当坦克以不同速度行驶时,坦克受到的激励频率不同。考虑行驶速度后,换算得到的时间域内的D级路面不平度,如图6所示。由图6可知,行驶速度提高对于坦克所受地面激励的幅值没有影响,但激励频率显著增大。本文在路面不平度建模时,考虑的路面空间频率n的范围为0.011~2.830 m-1。在考虑坦克行驶速度后,可以计算得出当坦克行驶速度为20 km/h、30 km/h及40 km/h时,坦克受到的来自地面激励的频率主要集中在0.06~15.73 Hz、0.09~23.58 Hz及0.12~31.44 Hz。显然,随着坦克行驶速度的提高,其受到的来自路面激励频率逐渐增大。此外,路面等级的变化主要影响坦克所受地面激励的幅值,而对路面激励的频率影响较小。结合图5可知,坦克行进间射击时,身管动态弯曲状态是自重与路面激励耦合影响下的综合表现。当火炮受迫振动的激励源频率较低时,身管主要表现为自重弯曲,当火炮受迫振动的激励源频率较高时,身管主要表现为路面激励下的高频振动。

(a) 20 km/h
(b) 30 km/h
(c) 40 km/h图6 时间域内的D级路面不平度Fig.6 D level road roughness in time domain
各行驶工况条件下,坦克行进间射击弹丸膛内运动时期弹丸前定心部与身管接触碰撞力曲线图,如图7所示。由图7可知,由于弹炮间隙的存在,弹丸在膛内向前加速运动的过程中,相对身管轴线方向做俯仰与侧摆运动,导致其与身管内壁发生了多次接触碰撞。但综合图5可知,在弹丸膛内运动的起始阶段,身管变形量较小,对弹丸运动状态影响较小。在此阶段各行驶工况条件下弹丸与身管间接触力都较小。而在弹丸膛内运动的后半程,身管变形量显著增大,弹丸运动状态受身管弯曲影响增大,各行驶工况条件下弹丸与身管内壁间的碰撞都主要集中在膛内运动的后半程。虽各行驶工况条件下弹炮接触力不尽相同,但都处于同一量级范围内(104N)。
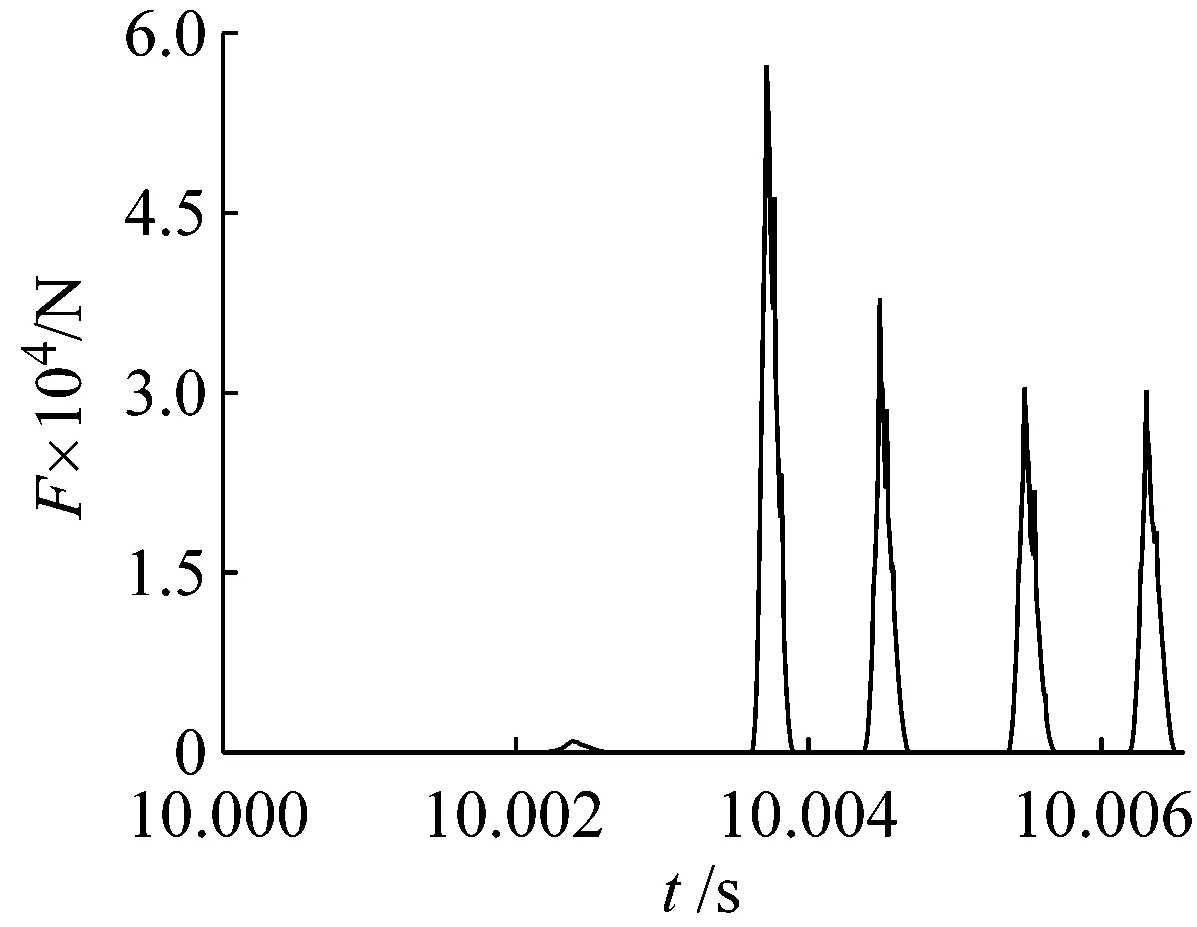
(a) 20 km/h、D级路面
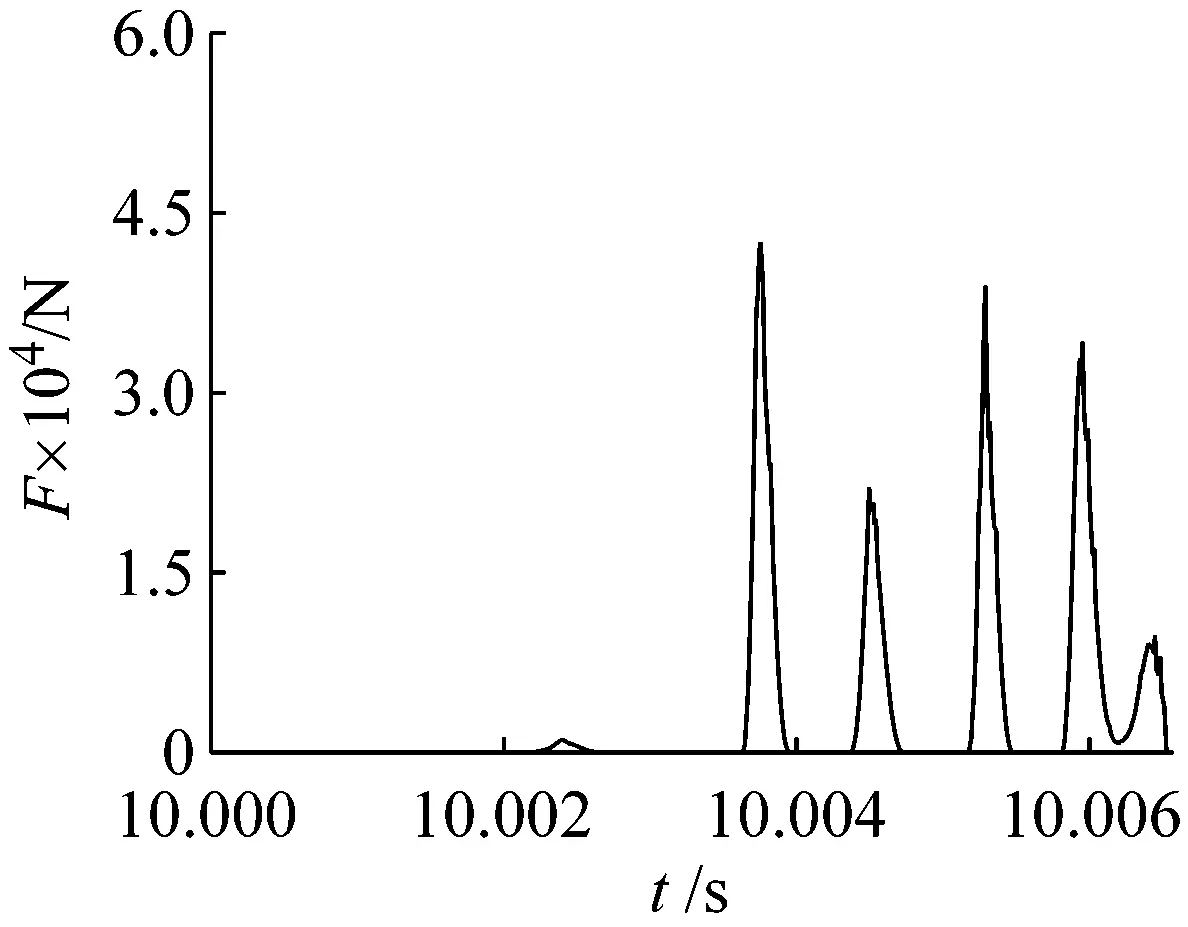
(b) 30 km/h、D级路面

(c) 40 km/h、D级路面

(d) 20 km/h、F级路面

(e) 30 km/h、F级路面

(f) 40 km/h、F级路面图7 弹丸膛内运动时期弹丸前定心部与身管接触力Fig.7 The contact force between the front centring of the projectile and the inner wall of the barrel
总结可知,虽然根据分析,弹炮耦合作用对身管弯曲状态的影响较小,但身管是弹丸膛内运动时期的导轨,其对弹丸的运动状态影响较大。当身管弯曲变形量较大时,会驱使弹丸改变既定的射击角度,严重影响射击精度。因此在对坦克行进间射击精度误差进行修正时,应该综合考虑身管动态弯曲造成的影响。由上文针对弹丸膛内运动时期身管动态弯曲状态的分析可知,当坦克车体较稳定(行驶速度低,路面条件好)时,身管弯曲主要是由身管自重造成的下垂弯曲,其对弹丸运动状态的影响仅与身管自身属性有关,数值变动范围较小,其可通过修正射角有效减小对射击精度的影响。但随着坦克受到地面激励逐渐增大(行驶速度提高、行驶路面条件趋于恶劣),地面激励逐渐成为影响身管弯曲状态的主要因素,其引起身管激烈的动态弯曲,使得自重引起的弯曲被淹没在其它振动中。此时,身管处于高频振动状态条件下,其弯曲状态并不能简单确定,因此,难以通过简单的静态射角修正解决其对射击精度的影响,可在坦克垂向稳定器控制器中将炮口中心角位移作为稳定器误差补偿信号,以减小身管动态弯曲对射击精度的不利影响。
3 结 论
基于建立的坦克行进间机电液耦合动力学模型,计算并分析了不同行驶工况下坦克行进间射击过程中的身管动态弯曲问题,以期为掌握行进间炮口振动规律及提高坦克行进间射击精度提供参考。主要研究成果为:
(1) 坦克行进间射击时,身管动态弯曲受弹炮耦合作用影响较小,其主要是自重与路面激励耦合影响下的综合表现。当坦克车体较稳定时,身管主要表现为自重弯曲,当坦克车体振动激烈时,身管主要表现为路面激励下的高频振动。
(2) 身管弯曲变形会驱使弹丸改变既定的射击角度,当坦克车体较稳定时,可通过静态射角修正减小其对射击精度的影响。当坦克车体振动激烈时,须进一步考虑身管的动态弯曲状态,可在坦克垂向稳定器控制器中将炮口中心角位移作为稳定器误差补偿信号,以减小身管动态弯曲对射击精度的不利影响。
