社交媒体机器人的研究现状、挑战与展望
2022-10-15周钰颖江婷君金小刚
周钰颖,闵 勇,2,江婷君,吴 晔,金小刚,蔡 和
1(浙江工业大学 计算机科学与技术学院,杭州 310023)
2(浙江工业大学 网络空间安全研究院,杭州 310023)
3(北京师范大学 新闻传播学院,北京100875)
4(浙江大学 计算机科学与技术学院,杭州310027)
5(浙江省经济信息中心,杭州 310006)
E-mail:myong@zjut.edu.cn
1 引 言
随着在线社交媒体和人工智能技术的融合发展,信息传播已经进入万物皆媒、人机共生、算法当道的3.0智能时代.与封闭单向灌输的1.0模式和以用户创造内容(User Generating Content,UGC)的2.0模式相比,智能时代的信息传播和意见交互过程相当程度上已由媒体平台的软件机器人与算法所控制.这些软件与算法通过与亿万用户的交互不断演化,从而使之与用户和媒体环境构成一个前所未有的人机耦合媒体(Coupled Human and Machine System,CHAMS).在CHAMS中,社交媒体机器人扮演越来越重要的角色.研究表明,Twitter上充斥着9%~15%的社交媒体机器人[1],而Facebook在2017年表示每个月大约有10万个机器人在平台上活动[2].大量证据表明,社交媒体机器人已经成为影响和干预网络信息传播的重要因素,并对社会稳定和国家安全产生深远影响.
本文从5个方面对社交媒体机器人的最新研究进行全面的总结并讨论未来发展趋势,包括:1)区分社交机器人和社交媒体机器人,明确定义社交媒体机器人;2)通过信息传播、意见形成、影响力重塑和隐私泄露4个方面探究其影响;3)归纳总结识别社交媒体机器人的方法,将现有识别技术分成3类,包括基于图论、基于机器学习和基于众包的方法,并展开讨论;4)探讨社交媒体机器人所处的科技伦理困境;5)从社交媒体机器人田野实验、集群技术以及与推荐算法的互动与干扰讨论未来研究趋势.
2 社交机器人和社交媒体机器人
随着计算机技术的发展,社交机器人技术开始萌芽和发展.广义上,社交机器人是指具备一定社交功能,被用于实现人机交互的软硬件系统.1966年,ELIZA作为第一个社交机器人出现在麻省理工学院的计算机科学实验室中,实现计算机程序通过人类语言进行对话的功能[3].而MrMind机器人在1998年实现在网络上的人机交流,标志着社交机器人走进互联网[4].随着人工智能和大数据技术的广泛应用,社交机器人的形态和种类也日渐多样化,从简单的网络信息爬虫,到灾难事件警告、播报天气预报的机器人,乃至更为智能和具有硬件实体的语音聊天机器人(如Siri、天猫精灵等)和银行餐饮部门使用的接待机器人等.
社交媒体机器人属于社交机器人的范畴,其活动空间是社交网络,并主要针对社交关系和信息传播进行活动.Woolley等人将社交媒体机器人定义为一种特殊类型的自动化软件代理,用于收集信息、做出决策,以及与在线真实用户进行交互和模仿[5].Ferrara等人认为社交媒体机器人是一种计算机算法,能够自动生成内容并在社交媒体上与人类交互,试图模仿并可能改变人类的行为[6].Wagner等人则认为社交媒体机器人是自动或半自动计算机程序[7].Howard等人指出,社交媒体机器人能够快速发布消息,并以人类用户的身份传递信息[8].Murthy等人则强调社交媒体机器人是控制社交媒体账户的计算机程序或算法[9].Grimme等人从5个方面来界定社交媒体机器人,包括:完全自动化以及部分人工控制的行为、自主行动、目标明确、通信方式多样和跨媒体[10].
综上所述,基于本文的讨论场景,综合Ferrara和Grimme等人的定义,将社交媒体机器人定义为一种活动在互联网社交媒体中,具有明确目标和意图,能自主对社交关系和信息传播产生影响的智能化软件系统[6,10].
3 社交媒体机器人的影响
近年来,社交媒体机器人的应用日益普遍,其影响呈现两面性.一方面,社交媒体机器人可以辅助生成规律性信息(如天气和路况预报等),提升信息时效性,减少人力成本.另一方面,机器人也被用于传播虚假信息或者操纵话题讨论,从而实现某种特定的商业和社会目的[11,12].
3.1 对信息传播的影响
社交媒体机器人可以自动发布新闻、博客、突发事件等,也可以收集内容以供人类消费和使用,促进信息传播.但同时能在短时间内发布大量几乎相同的内容,达到广告营销的目的,也可以将恶意链接嵌入到信息中,通过URL重定向,传播恶意网站信息,促进虚假信息、负面信息的传播[13].2017年法国总统大选前,机器人恶意扩散和传播马克龙竞选文件,同时夹杂虚假报道,严重影响法国大选[14].机器人活动也曾让Cynk科技公司被持续讨论,导致该公司的市值短时间内剧烈波动[6].
Shao等人在Nature正刊中发表的研究指出社交媒体机器人在传播来自低可信度来源的文章中起着不成比例的作用[15].通过构建1400万条Twitter信息的转发网络和“Knockout”策略,证明社交媒体机器人在传播的早期放大此类内容,还会通过回复和提及使用户吸引到更多关注者.人类用户很容易受到这种操纵的影响,共享机器人发布的内容.
Stella等人在美国科学院院刊中发表的文章探究加泰罗尼亚独立公投期间社交媒体机器人的活动,发现机器人产生超过20%的公投帖子,人类与机器人互动占19%,包括75%的转发和25%的提及,表明其加速公投期间负面和煽动性内容的传播[16].研究将核心社交互动定义为至少有一次转发以及存在回复或提及并构建社交网络.采用Fiedler向量确定两个极化社团,发现两个社团中的机器人主要与人类互动,并且会战略性地与影响力大的人类进行互动.
Cresci等人发现社交媒体机器人利用高价值股票推广低价值股票,干扰股票市场的正常运作.通过收集900万条与美国五大金融市场股票相关的推文,利用异常检测技术来检测发文峰值,发现处于峰值的文章中有60%是转发,而其中71%来自机器人账户,并且转发内容中高价值的股票和低价值的股票经常同时出现[17].
Wang等人结合传播动力学知识,模拟社交媒体机器人在Twitter上生成、获取和传播虚假信息的场景[18].首先使社交媒体机器人搜索关于特定主题的信息,然后使其通过转发假新闻制造初步欺骗性信息,最后使其传播信息规模最大化[18].在传播过程中,社交媒体机器人可以评估每个用户的好友数量,从而更有针对性的对有影响力的人类用户进行信息传播,最终可以达到大规模传播虚假信息的效果.Balestrucci等人则通过研究一个公开可用的假新闻数据集,发现社交媒体机器人的推文发布率明显高于人类用户[19].
可见,社交媒体机器人加速虚假、噪音信息的传播,能够在短时间内使得目标信息大面积扩散,达到事件“炒作”、干扰市场甚至干预政治活动的目的.
3.2 对意见形成的影响
社交媒体机器人在一定程度下可以操纵舆论,改变用户行为,影响意见形成过程.它们可以轻易地加入并且操纵一个群体,改变群体对于事物的认知.在特定话题中,社交媒体机器人只需要占据足够大的比重,就能改变公众意见,从而使其传播的观点最终成为主流观点[20].

ABM模型也被用于探究社交媒体机器人对人类意见形成的影响[20,23].ABM模型基于“沉默的螺旋”理论[24],即人因害怕被孤立而犹豫是否发表意见.该模型假设人类表达意见的3个重要因素:代表主观意愿(积极/消极)的固定二分值vi、发表意见的渴望程度ci和用户邻居的影响δ(t).δ(t)被表示为(n)s(t)-no(t))/(n)s(t)+no(t)),其中ns(t)和no(t)分别表示时刻t邻居中与自身观点一致和不一致的用户数量.结合以上3个因素,用户i在t时刻表达意见的态度模型如下,其中l为常量:
(1)
模型假设每个人都有表达阈值φi,因此用户i公开表达意见(1表示表达,0表示不表达)可以表示为:
(2)
Ross等人在初始化过程中,使xi(t)和φi均服从均匀分布.通过逐个添加节点的方式构建无向图,假设机器人独立加入社交网络,并且节点数量少于人类节点数量.结果表明,在高度两极化下,机器人参与度仅为2-4%就足以改变2/3的用户邻居影响力δ(t).而Cheng等人在小世界和无标度网络中进行模拟,将人类意愿随机设置为积极或消极,机器人意愿均设置为消极,人类用户的ci随机设置为[0,1],机器人设置为ci=1,δ(t)=0,即机器人始终保持自己的观点.结果表明,社交媒体机器人参与讨论度为5%-10%,即可改变公众意见,使它们传播的观点最终成为主流观点.
3.3 影响力重塑
一些社交媒体机器人通过扩大社交圈来获取更大的影响力,让意见被更多人看到[25].它们通过关注受欢迎和有影响力的人,或渗透特定或流行的话题讨论之中,从而提高曝光度.例如,新浪微博充斥的大量水军通过有目的、有计划地在平台上讨论某个事件,使事件持续发酵,达到“炒作”效果.
Boshmaf等人通过机器人蜜罐实验构建社交媒体机器人网络,让机器人在Facebook上运行并与大量Facebook用户进行互动,用于了解社交媒体机器人通过大规模渗透威胁人类用户的方式,结果发现机器人以80%的成功率与人类用户建立联系[26].Aiello等人在社交网络aNobii中进行实验,发现机器人仅仅访问用户界面也能获得人类用户关注[27].Rizoiu等人收集2016年第一次美国总统答辩期间的大量推文数据集,从用户影响力、政治行为等角度分析150万用户[28].利用发文时间和用户特征对信息扩散结构进行建模,发现社交媒体机器人在活动开始时转推更多信息,并且影响力是人类的2.5倍.
这些研究显示人类用户在机器人面前的脆弱性,社交媒体机器人在社交网络上很容易重塑影响力.
3.4 隐私泄露
现如今,成千上万的用户活跃于社交网络之中,在线社交网络的作用远不止联系朋友、家人和熟人,更是人类用户接触外界活跃用户的媒介,社交活动的有效性依赖于用户之间的信任.用户对于社交媒体机器人的弱意识以及机器人与人类行为的高度相似性,使得社交媒体机器人可以与人类用户建立任意数量的连接,获取大量用户的个人信息(如出生日期、手机号码、邮箱地址等),造成用户隐私泄露.
Michalopoulos等人探究了Facebook上的用户接受未知用户好友请求的过程,结果表明,大部分用户都愿意接受未知好友请求,并且愿意与其分享重要的个人信息[29].Ge等人通过在社交网络上向不熟悉的人发送好友请求,发现用户对于陌生账号的警惕性不高,社交媒体机器人能够很容易访问到用户资料,尤其对于青少年的隐私获取特别容易[30].Li等人发现社交媒体机器人获取隐私的有效性与网络拓扑结构和联系目标选择存在很大的联系[31].当社交媒体机器人与单个用户进行联系时比较困难,而与一个紧密联系的社区进行互动比较容易.
社交媒体机器人可以利用社交活动,自动提取用户的隐私内容.当用户意识到自己在与社交媒体机器人进行互动时,会产生对社交平台的不信任感.并且开始谨慎与外界用户交流,导致人类用户之间以及用户对社交网络的信任缺失,对社交网络生态健康发展造成严重的威胁.
3.5 本章小节
本章旨在探究社交媒体机器人的影响,社交媒体机器人作为有效工具,可以提高信息传播速度,但同时会对虚假信息传播、意见形成等方面造成负面影响,同时能够重塑影响力,并且造成人类隐私泄露、信任缺失等问题.
4 社交媒体机器人识别方法
社交媒体机器人已经对社会稳定和国家安全产生明显的影响.因此,搜索和识别社交媒体中的机器人账号成为一个重大挑战.
4.1 基于图论的方法
基于图论的方法旨在利用社交网络结构和动力学特征识别机器人账号,最新研究主要利用循环置信传播和随机游走算法进行机器人识别[32].本文对算法进行优缺点概括,如表1所示.
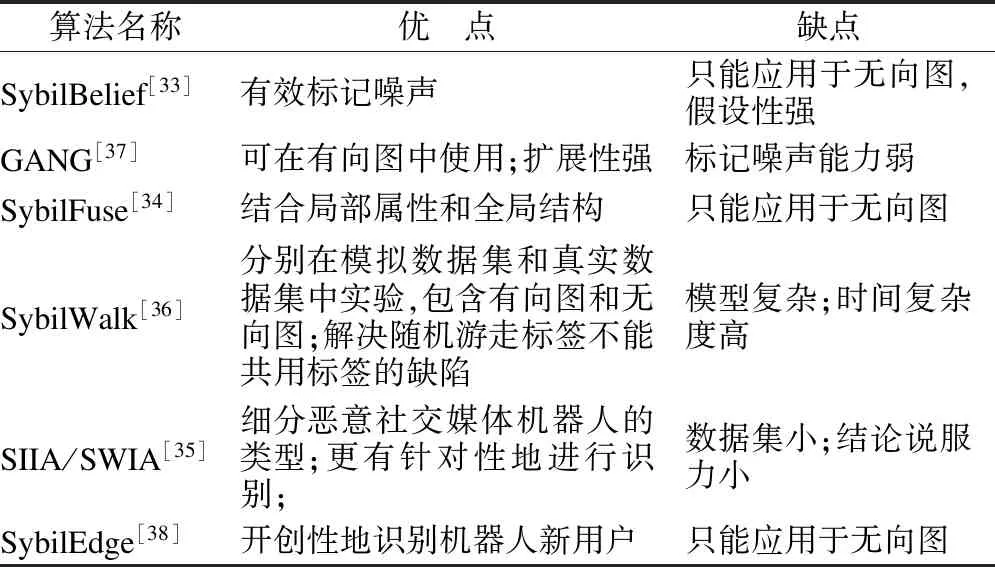
表1 基于图论的方法比较Table 1 Comparison of graph based methods
SybilBelief算法将社交网络建模成马尔可夫随机场(MRF),通过一组已知状态的机器人和人类节点,使用循环置信传播算法,迭代收敛获得未知节点是机器人的可能性[33].在建模马尔可夫随机场时,为节点和边分配势能量.其中xv∈{-1,1},xv=1代表人类节点,xv=-1代表机器人节点.节点v和边(u,v)的势能量表示为:
(3)
(4)
其中θv表示节点v的先验信息,根据节点内容和行为生成,wuv表示两个节点的耦合性.
在马尔可夫随机场中进行循环置信传播(LBP).Γ(u)表示节点u的邻居节点集合,在迭代次数为i时,消息从节点u传到v被定义为:
(5)
当迭代结束以后,通过节点概率进行排名,得到最有可能的机器人节点.未知节点的后验概率求解方式如下:
(6)
SybilBelief算法基于机器人节点很难与人类节点建立连接的假设,认为机器人节点和人类节点之间的联系具有局限性.但是SybilFuse算法认为在虚拟网络上,机器人可以大范围与人类节点产生联系,在SybilBelief算法的基础上进行改进[34].
SybilFuse算法首先利用节点的属性(度数、聚类系数等),在SVM、逻辑回归等分类器下获得节点的信任分数,即节点是人类节点的可能性,节点v的初始信任分数表示为Sv,同理获得边的初始信任分数,即边不是机器人与人类相连的可能性,边(u,v)的信任分数表示为Su,v,然后分别使用循环置信传播算法和随机游走算法识别机器人节点.
在循环置信传播算法中,同SybilBelief类似,但使用分类器得到的局部信任分数初始化节点和边势函数:
(7)
(8)
在随机游走过程中,初始化节点信任得分为S(0)(v)=Sv.随机游走完成后,将最终信任分数用于排名.其中S(i)(v)表示节点v第i次游走的信任分数:
(9)
Liu等人将机器人节点细分为发起者(发送消息)和工作者(仅转发),认为工作者更有可能互相关注和形成社团[35].方法包括识别工作者和发起者.由于工作者节点倾向于直接转发发起者的信息,因此在识别工作者节点时,根据转发行为定义节点间相似度,从已知状态的节点开始随机游走,获取工作者分数.进而根据工作者直接转发的微博数量量化发起者可能性,识别机器人发起者.
(10)
边的权重表示节点u对于v的重要性,定义为:
(11)
(12)

除上述算法外,许多研究也在图论方面展开.SybilWalk算法解决了随机游走不能同时包含人类用户标签和机器人用户标签的问题[36].他们定义两个节点:人类虚拟节点lb和机器人虚拟节点ls,并将其添加到社交网络中.将lb与已知人类节点相连,将ls与已知机器人节点相连.对于未知节点u,从u开始随机游走,将节点u是机器人的概率定义为随机游走先到达ls,而不是lb的可能性,迭代得到概率,判断机器人账号.GANG算法将SybilBelief算法,应用于有向图中[37].SybilEdge算法对识别新出现的机器人作出贡献[38].
基于图论的方法旨在将网络构建成图,该方法以直观的方式呈现网络结构,量化节点和边的性质,包括节点度、中心性、相似性、聚类系数等指标.在构图过程中去除无用的边和节点,减少噪声数据.但是在大数据环境下网络涉及大量节点和边,过程耗时严重,并且存在失败的风险.
4.2 基于机器学习的方法
机器学习方法的核心是机器人用户的有效特征.综合现有研究,机器人特征可被分为6类[39],包括:
1)用户特征:与用户相关的基本数据,包括简介、头像、用户名、创建时间、地理位置、国家等信息;
2)社交特征:与用户互动有关的信息,包括用户的粉丝数、关注数量、好友数量、转发数量、点赞数量、提及数量、被转发数量、被点赞数量、被提及数量等,其中粉丝数、关注数量针对新浪微博或Twitter等有向交互平台,好友数量适用于Facebook等无向交互平台;
3)内容特征:文章的详细文本内容,可通过自然语言处理分析,包括URL数量、文本相似性、图片/视频数量、文本长度、文本关键字、原创文章数量等;
4)网络特征:社交网络图的各项指标,包括度数分布、节点相似性、社团结构、聚类系数、节点中心性等;
5)时间特征:关注频率、发送好友请求频率、发文频率、评论频率、发文时长、点赞频率等,其中关注频率适用于有向交互平台,好友请求频率适用于无向交互平台;
6)情感特征:用户互动时的情感倾向,包括表情符号占比、情感词频率等.
不同类别的特征的使用存在差异性,如图1所示.内容特征被最为广泛的使用,许多社交媒体机器人发送的内容具有高度重复性,同时内容涉及更多的URL数量、标签、图片和视频等[40].社交特征中最为明显的是在有向交互平台中,社交媒体机器人的关注人数明显高于粉丝人数.同时在互动中表现更为活跃,尤其是发文频率和点赞频率更高.在网络特征中社交媒体机器人的节点中心性较低,同时更倾向于与人类节点建立联系.而情感特征被较少使用,但是很多研究认为机器人的情感倾向与人类用户存在明显差异,因此今后的研究可以借助情感分析模型、文本聚类等提取这一方面的特征[41,42].

图1 特征类别数量统计图Fig.1 Statistical chart of number of feature categories
基于上述全部或部分特征以及机器学习算法,产生了一系列检测算法和平台,如表2所示.其中最具代表性的是BotOrNot机器人检测平台.BotOrNot是第一个公开用于识别Twitter机器人的平台,采用随机森林分类器,利用1000多种特征进行训练[39].Ferquist等人同样使用随机森林分类器,利用Twitter关于2018年瑞典大选的推文训练分类模型,认为识别机器人的重要特征是用户的点赞次数/用户所拥有的好友数量以及关注者和粉丝比例[43].Fazil等人使用随机森林、决策树和贝叶斯网络,分别按照机器人和人类用户1∶1、1∶2、1∶5和1∶10的比例构建数据集训练分类器[44].
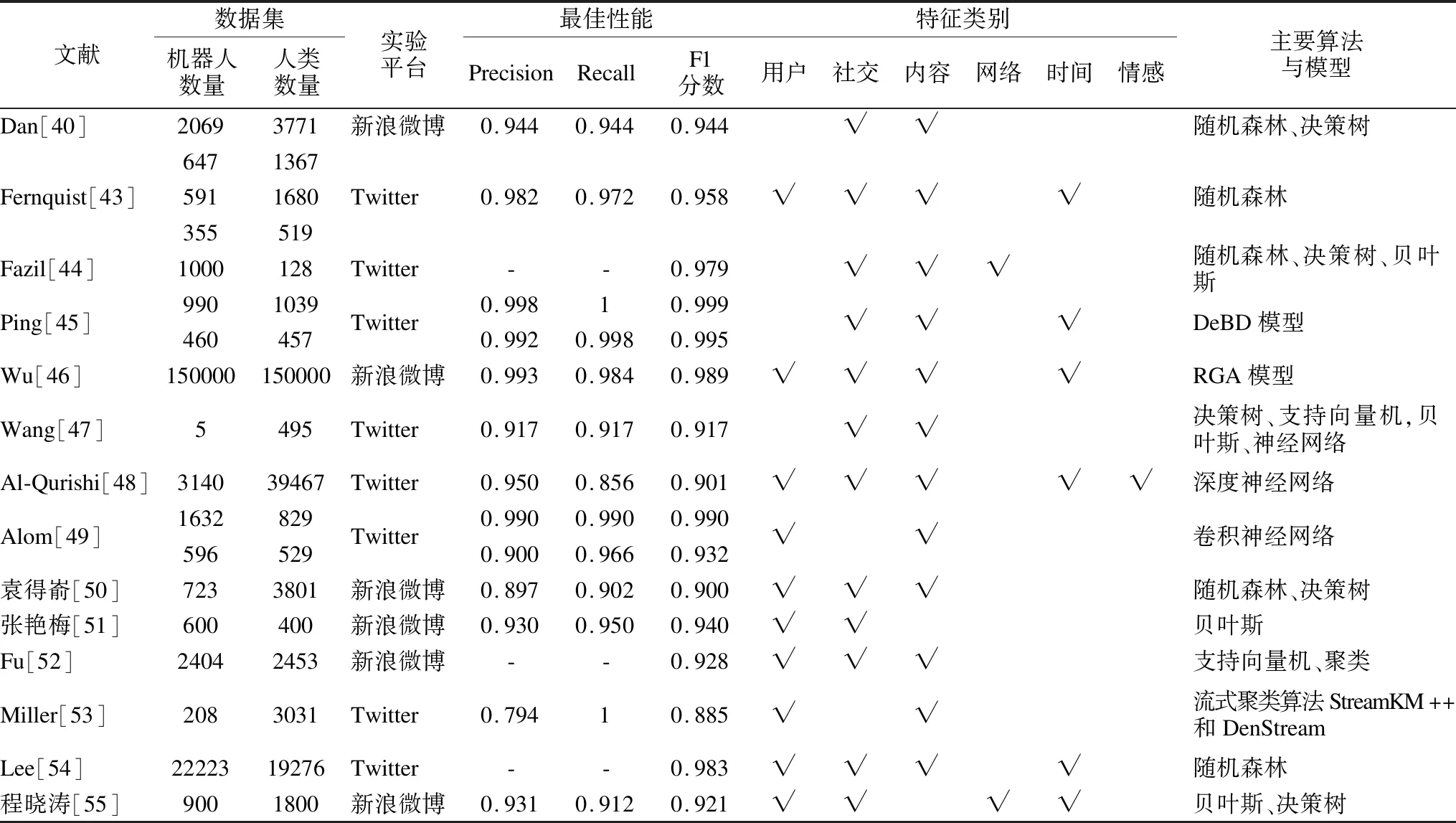
表2 基于机器学习的方法对比Table 2 Comparison of machine learning based methods
Ping等人提出基于深度学习算法的检测模型DeBD,如图2所示,主要包含3层[45].第1层为联合内容特征提取层,提取文章内容以及文章之间的关系特征.他们首先使用Word2Vec将推文单词转化成词向量,随后将账号的所有推文表示为矩阵并进行连接,通过卷积神经网络提取其特征.第2层为时间特征提取层,将用户元数据输入到LSTM中,提取用户时态特征.第3层为特征融合层,结合了上述内容特征和时序特征.
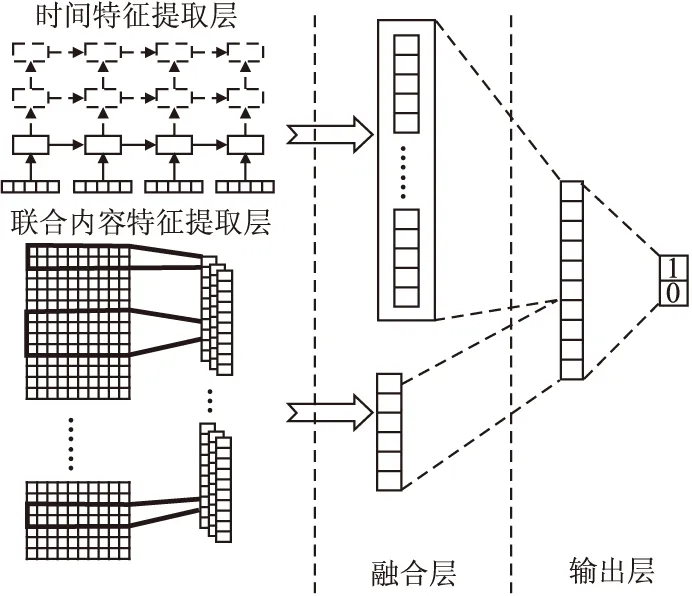
图2 DeBD模型[45]Fig.2 DeBD model[45]
Wu等人提出RGA模型,该模型由输入层、残差网络(ResNet)层、双向门控循环单元(BiGRU)层、注意层和推理层组成[46].在输入层中,使用L2范数对用户特征向量进行标准化.残差网络层由3个残差块组成,每个残差块均为多层神经网络,包含卷积(Conv1D)层、批归一化(BN)层和矫正线性单元(ReLU)激活层,用于初步提取用户特征向量的时间模式.双向门控循环单元同时考虑过去状态和未来状态,用于进一步提取特征向量的时间模式.注意层用于提取数据中的关键信息和重要模式.在推理层中,采用全连通层和sigmoid激活函数进行二值分类,得到最终分类结果.
机器学习适用于大型网络分析,根据实际场景选择和提取特征.但是该方法性能受限于特征的选择和分类算法,并且不同数据集也会带来实验结果的差异.
4.3 基于众包的方法
众包是指以自由和自愿的方式将任务分配给特定的人,主要依赖于人类的智能和敏感性.基于众包的检测研究最为代表性的是Wang等人提出的众包恶意机器人检测系统[56].该系统包含过滤层和众包层,过滤层使用一组过滤器查找疑似恶意机器人,过滤器可以使用现有的恶意机器人检测方法实现.然后将疑似恶意机器人输入到众包层,进行人工手动标记,同时在社交网络上应用此方法,发现众包人员的标记效果会随时间推移而下降.Alarifi等人采用此方式标记Twitter账户中的人类和社交媒体机器人账号,并用于对比多种检测系统的有效性[57].西班牙最大的社交网络Tuenti使用14名众包人员来检测社交媒体机器人[58].Cresci等人则开展了一项探究机器人众包有效性的实验,发现众包工作者识别社交媒体机器人的准确性欠佳[59].此外,Kouvela等人结合众包机制和机器学习,通过在Twiiter上部署公开可用的社交机器人检测服务来提高识别机器人的性能[60].
众包方法可以保证数据的相对可靠准确,但是在大型网络下的识别工作成本高,同时会涉及到隐私问题,并且众包人员的不确定性会导致标记结果不准确.同时,众包方法主要依赖人工标注,较少涉及计算机核心技术和算法创新,因此不在本文中详细描述.
4.4 本章小节
本章总结概括目前社交媒体机器人识别的相关工作,分别从基于图论的方法、基于机器学习的方法和基于众包的方法3方面进行展开,并对方法进行对比与评估,为今后识别社交媒体机器人工作提供帮助.
5 社交媒体机器人的科技伦理困境
社交媒体机器人正在凭借自身的智能化、功能化和社会互动性潜移默化地影响和改变社会.在虚拟网络空间中,人物角色可能部分由社交媒体机器人控制,部分由人控制,使得行为主体(执行任务)和道德主体(承担责任)之间的一对一关系丢失,越来越难以界定行为和道德主体,这导致机器人伦理困境,即:社交媒体机器人应该仅被当作行为主体还是可以被当作道德主体.
一方面,可以仅仅将社交媒体机器人当作工具,即只充当行为主体.工具主义理论表示技术是人类用于完成目的的工具,而工具是中立的,只用于提高效率[61].根据工具主义理论,社交媒体机器人不需要对执行的任务负责,任何操作最终都由某些人员(系统的设计人员,设备的制造商,产品的最终用户等)负责,人类是唯一的道德追究人.如果机器人出现问题或有人受到机器人的伤害,应该将责任归咎于执行此类操作的人.
另一方面,当今社会的道德主体已经延伸到个体人以外的社会互动实体.社会不仅涉及人与人的互动,而且涉及人与机器、机器与机器之间的关系.这需要人类重新思考关于个体、技术和道德的关系,重新定义道德承担主体.决定这一问题的标准方法集中在Coeckelbergh提出的“内在属性”上,其确定了一个或多个道德相关的属性[62].如果社交媒体机器人拥有道德属性,则将其视为道德主体,需要承担一定的责任.
与医学和生物学研究相比,我国对于社会学和科技研究的伦理研究依然空缺,从未探讨机器的道德性问题.对于社交媒体机器人行为尚未给出明确的伦理规范,未能界定其承担伦理责任的界限,伦理研究领域充满机遇和挑战.
6 社交媒体机器人的未来研究趋势
6.1 社交媒体机器人田野实验方法
利用社交媒体机器人技术在真实网络和媒体环境下开展田野实验,挖掘人-机交互规律,探索舆论干预和引导是近几年出现的全新研究方法,为社交网络分析、信息传播研究等领域提供了新的工具.德克萨斯大学奥斯汀分校的Dhiraj Murthy副教授针在Twitter中人为投放机器人账号,追踪测量机器人对2015年英国大选期间相关舆情的影响力,探究机器人在推动话题网络形成、扩散特定标签信息等方面的作用,证明机器人的作用并不显著[9].而南加利福尼亚大学的Emilio Ferrara副教授在Twitter部署机器人验证不同信息传播模型的有效性[63].宾夕法尼亚州立大学的Kevin Munger副教授利用具有不同用户属性和粉丝数量的社交媒体机器人攻击具有种族歧视言论的账号,发现被具有“大量粉丝”、“白人”、“男性”机器人攻击的账号,会明显减少其种族歧视言论[64].这些早期研究获得高度重视,3项研究在Google Scholar的引用数量均在百次左右.2019年,浙江工业大学团队在微博上开展了我国首次社交媒体机器人控制实验研究,证明用户偏好对于信息茧房形成和内部结构异化的关键作用[65].现阶段关于社交媒体机器人的实验模式如表3所示.
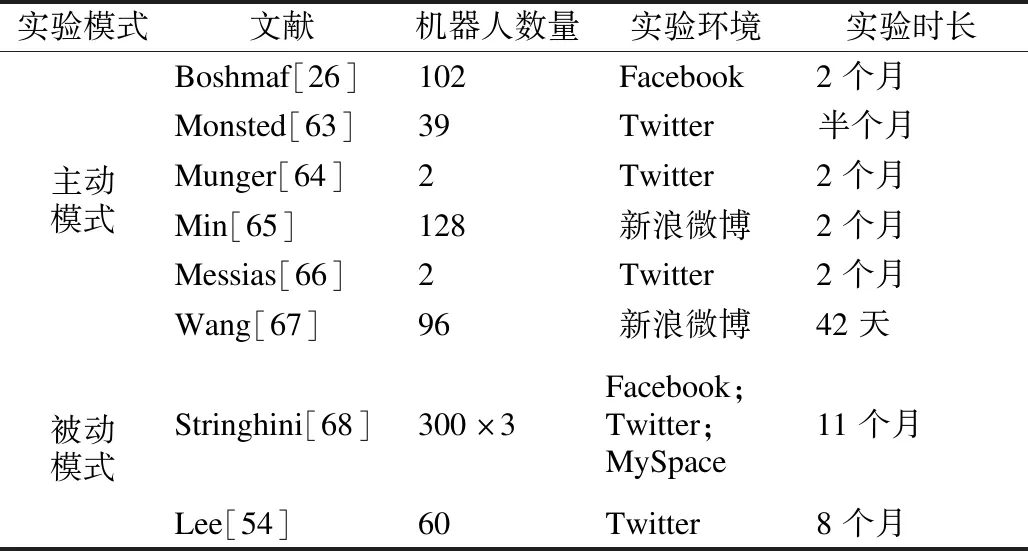
表3 社交媒体机器人实验模式对比表Table 3 Comparison table of social media bots experiments
实验中,社交媒体机器人的活动模式可归纳为主动模式和被动模式.主动模式表示社交媒体机器人主动与人类用户进行互动,主要分为4个步骤(见图3):1)建立社交媒体机器人,可以使其形成机器人内部互连网络;2)机器人关注人类用户;3)机器人从关注用户的粉丝列表以及关注列表中随机选择用户继续关注;4)运行一段时间之后,继续关注“回关”的用户,取消关注没有“回关”的用户.
被动模式与主动模式相反,机器人被动接受人类用户的消息或关注,如图3所示:1)在社交网络上部署机器人,并与其他机器人用户互动;2)人类用户主动关注社交媒体机器人,追踪这些人类用户的行为.
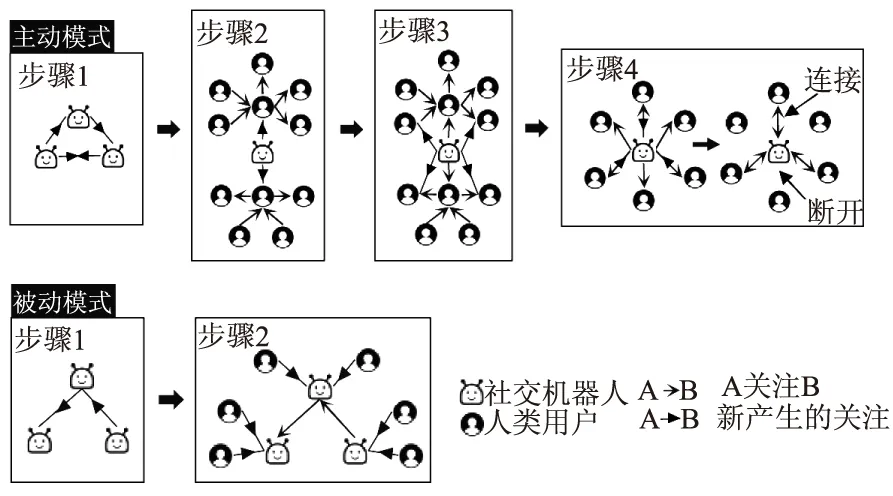
图3 实验部署模式Fig.3 Experimental deployment mode
主动模式和被动模式核心区别在于是否主动与人类用户发生互动.由于主动模式尝试通过各种方式和用户产生互动,因此活跃度更高,产生的粉丝、关注数量多于被动模式,对网络干预更大.如今采用主动模式部署机器人的研究从多方面开展,包括研究信息传播规律、社交网络平台的可渗透性、社交媒体机器人的影响力等,而被动模式的研究比较单一,基本用于识别恶意社交媒体机器人.
虽然目前科学实验开始使用社交媒体机器人进行实验,但是仍然处于探索阶段,一些问题亟待明确和解决.
1)实验门槛高
使用社交媒体机器人开展田野实验对于技术有很高的要求.完成一次社交媒体机器人实验,需要具备交叉学科思维,由社会学、计算机科学、信息科学等多个学科的研究和开发人员共同参与.同时,真实社交网络环境复杂且难以控制,导致组织和执行实验难度大.
2)人工智能技术限制
虽然人工智能算法发展迅速,但在生产环境下依然存在不足,特别是与真实用户互动时,用户行为复杂多样,信息检索、情感识别等无法完全准确,算法产生的偏差很可能影响实验结果的可靠性.
3)道德和法律问题
使用社交媒体机器人进行科学实验时,如果行为不当会导致法律和道德问题,如舆论引导、侵犯隐私等.要明确实验只能用于科学研究,避免不适当的控制和干预.
6.2 社交媒体机器人集群技术
社交媒体机器人的核心作用是通过转发、评论和点赞等操作,增强特定账号的影响力,扩大特定信息传播能力.然而,对于如何设计和优化机器人的行为依然处于起步阶段.目前,相关研究更多关注单个机器人的行为设计和分析,包括:活跃时间、信息内容的选择以及行为模式设计等.对于2017年西班牙加泰罗尼亚公投期间的Twitter互动研究表明,在约18%的机器人账号和82%的人类账号组成的单个极化群体中,机器人账号相互互动是极其稀少的,仅不到3%,在不同极化群体之间,机器人账号几乎不存在任何互动[16].
随着智能技术的发展,以无人机和车联网为代表的各类软硬件智能体的应用和研究都发展到了集群尺度.例如:部署无人机集群可以让无人机分别实现指挥、探测、攻击等功能,协作完成任务,单个无人机的故障不会影响其他无人机的工作,这展现了无人机集群具备极大的优势[69,70].然而,在社交媒体机器人应用和研究中,集群的概念、理论、应用和影响依然处于空白阶段.因此,集群理论可能成为提升社交媒体机器人能力和效率的重要渠道,并对维护国家安全和社会稳定的起到积极作用.
综合各类智能集群的理论以及社交媒体机器人的特点,可以明确社交媒体机器人集群当前研究的3个必要特征:
1)规模设计[71],在体量庞大的真实社交网络媒体中要发挥一定的作用和影响,介入的机器人数量必须达到一定的阈值,而这个阈值的大小以及与社交网络中不同特定子群规模的关系是整个集群理论的基础.
2)集群的结构设计[72].从各类智能体集群的研究中可知,集群结构主要可以分为中心化结构和去中心化结构,两者如何影响集群的功能和效率是结构设计的核心.在此基础上,一些典型的网络结构特征对集群的影响也不可忽视,包括:无标度度数分布、小世界性、社团结构以及层次结构等.此外,结构的动态演化特征也是需要重视的问题.
3)机器人之间的互动行为设计[16].在社交网络中,媒体机器人的主要信息消费行为包括:阅读、发表、转发、点赞和评论等,主要的社交行为包括:关注(和取消关注),私信聊天等.在特定集群结构的基础上,不同机器人之间如何协调活动是整个集群设计的关键.其中,机器人之间的评论(包括回复)互动对于公共舆论环境中的意见形成和影响力构建有着关键性作用.
总之,探索具有特定规模,结构和互动行为的社交媒体机器人集群对于未来的在线社交媒体治理具有较高的前瞻性作用.
6.3 社交媒体机器人与推荐系统的互动与对抗
如上所述,社交媒体机器人的应用和研究都集中在机器人与人类的互动.然而,在当今的社交媒体中,除社交媒体机器人外,推荐算法也是一个重要的人工智能角色.在影响信息传播和意见方面,社交媒体机器人更多的处于非中心化的角色,并且个人、组织和机构都可能使用机器人,而推荐算法却几乎掌握在媒体运营者手中,是运营者实现其商业或其他目的的重要手段.在2020年美国大选的网络媒体中,可以清晰看到Twitter、Facebook等西方网络运营商如何通过推荐系统操控信息传播[73].同时,海外媒体的推荐系统也成为影响我国对外宣传的重要因素.因此,从外界影响和干预推荐系统将成为一个可能影响我国国际话语权的关键问题.2020年1月,Nature正刊发表一篇前瞻性文章,明确提出利用社交媒体机器人研究和对抗现有推荐算法是当前互联网信息传播领域的前沿问题[74].
2020年一次针对谷歌地图的社会学实验揭示了机器人可能成为干预推荐系统的一种潜在工具.一位德国艺术家将99部手机以缓慢的速度拖过一条柏林街道,让谷歌地图后台算法认为此条道路上的车速缓慢,从而标记为拥堵(1)https://www.bleepingcomputer.com/news/software/hack-creates-fake-google-maps-traffic-jams-with-99-cell-phones/.这说明通过一定规模的机器人群体模拟一些人类行为有可能影响智能算法的结果.此外,利用大量水军进行广泛点赞和转发,已经成为在新浪微博等平台中制造热点的重要手段.
因此,社交媒体机器人的作用不仅仅限于其内部以及与人类用户的互动,更可以扩展为与社交媒体生态中其他智能算法的互动,从而成为塑造整个社交媒体生态环境的关键技术.
