空气-磁流变液半主动型动力吸振器的研究
2022-10-13李浩田王海芳李凌轩陈晓哲
李浩田,王海芳,李凌轩,陈晓哲
(东北大学秦皇岛分校控制工程学院,河北秦皇岛066004)
0 前言
在工程中,如食品包装、船舶制造、车辆工程,需要可以实现较大振幅削减的带宽制振方法。动力吸振器是常见的制振方法。
动力吸振器分为三类:被动型动力吸振器、半主动型动力吸振器、主动型动力吸振器。被动型动力吸振器,如张震坤等研究的鼠笼式调谐质量阻尼器,具备简单的结构,但不具备带宽制振能力;半主动型动力吸振器,如郎君等人研究的半主动控制接地式动力吸振器,具备简单的结构和带宽制振能力;主动型动力吸振器,如贾富淳和孟宪皆研究的基于功率流理论的主动式动力吸振器,具备带宽制振能力但要加装控制回路,所以结构比较复杂。而工业环境中大多要求动力吸振器兼备带宽制振能力和简单的结构,故提出一种半主动型动力吸振器。
有学者提出了可变刚度机构,如NEUBAUER和WALLASCHEK研究的分流压电陶瓷机构;LIU等研究的电磁刚度机构;靳晓雄等研究的空气弹簧机构等。这些为半主动型动力吸振器的刚度装置提供了参考。
现代诞生了许多可变阻尼机构,如贾永枢等研究的基于流动模式的汽车双筒式磁流变减振器和彭志召等研究的具有并联常通孔的磁流变阻尼器。这些为半主动型动力吸振器的阻尼装置提供了参考。
此外,赵凯华和陈熙谋研究了磁导材料的磁化曲线和电磁铁内的磁场强度。李忠献和徐龙河研究了磁流变液阻尼器的性质。史铁钧和吴德峰研究了宾汉流体的性质。背户一登研究了动力吸振器参数的优化方法。
基于上述研究,为实现宽频制振,提出空气-磁流变液半主动型动力吸振器的结构并分析其刚度和阻尼。由于此动力吸振器可以实现刚度和阻尼的双重调节,对主质量振幅的削减程度较大。
1 结构及原理
空气-磁流变液半主动型动力吸振器的结构如图1所示。平衡状态下,气室1对质量块的压力、气室2对质量块的压力和质量块受到的重力平衡,当质量块产生向下的位移时,气室1体积增大压力减小,气室2体积减小压力增大,质量块受到向上的合力。这样,在质量块和外壳之间就产生了一个刚度,且可以通过调节两气室的初始高度和初始气压调节刚度的大小。质量块的下端和外壳通过磁流变液阻尼器连接,阻尼器内的磁流变液在常态下是牛顿流体。但是,磁流变液在流动状态下,若接触到垂直其流动方向的磁场,它与磁场接触的部分就会变为宾汉流体,且其屈服剪应力随外加磁场磁感应强度增大而增大。阻尼器内含电磁机构,可以通过控制电流大小来控制磁场的磁感应强度,进而控制阻尼力。这样,在质量块和外壳之间就实现了一个可调阻尼。

图1 空气-磁流变液半主动型动力吸振器 图2 系统的结构简图
动力吸振器与主质量连接后系统的结构简图如图2所示。其中:、、、分别是主质量的质量、刚度、阻尼、位移;、、、分别是动力吸振器质量块的质量、刚度、阻尼、位移;是外界激励。、的单位为kg,、的单位为N/m,、的单位为N·s/m,、的单位为m。
2 空气弹簧的可变刚度
空气弹簧的简图如图3所示。图中、分别是气室1的初始高度和初始压力;、分别是气室2的初始高度和初始压力;是质量块的端面面积;取向下为正方向。、的单位为m,、的单位为Pa,的单位为m。

图3 空气弹簧简图
气室1和气室2内的气体状态方程分别为
()133=(+)133
(1)
()133=(-)133
(2)
设两气室对质量块的压力和质量块受到的重力的合力为(单位:N),向下为正方向,则:
=+-
(3)
对于初始状态下的质量块,有:
+-=0
(4)
联立式(1)—式(4),可得:


(5)
通常情况下,远小于和,将式(5)在=0处按泰勒公式展开并忽略二阶及以上小量,有:

(6)
则:

(7)
由式(7)知:可以通过调节、、、调节。
3 磁流变液阻尼器的可变阻尼力
磁流变液阻尼器的结构如图4所示。、和分别为两磁导盘的厚度、间距和外径,为两磁导盘之间的伸缩杆轴段半径,和分别为磁导外壳的内径和外径。磁导盘1、磁导外壳、磁导盘2、伸缩杆由磁导材料DR530制成。密封端盖1、隔液盘、密封端盖2、压紧端盖、压紧环、导向环由绝磁材料奥氏体不锈钢304制成。磁流变液选用MRF-J。、、、、、的单位为m。

图4 磁流变液阻尼器的结构
这样,通电线圈、两磁导盘之间的伸缩杆轴段、磁导盘1、磁导盘1和磁导外壳之间的气隙、磁导外壳、磁导盘2和磁导外壳之间的气隙、磁导盘2就形成了一个圆柱形闭合磁路。由于磁路整体围绕圆柱的轴旋转对称,所以只需取任一过轴的面进行磁路分析。磁路简图如图5所示,~分别为磁路中各段的磁场强度。此外,磁路中各段的路径为~,对应的磁感应强度为~,对应的横截面积为~,对应的磁通量为~。~的单位为A/m,~的单位为m,~的单位为T,~的单位为Wb。
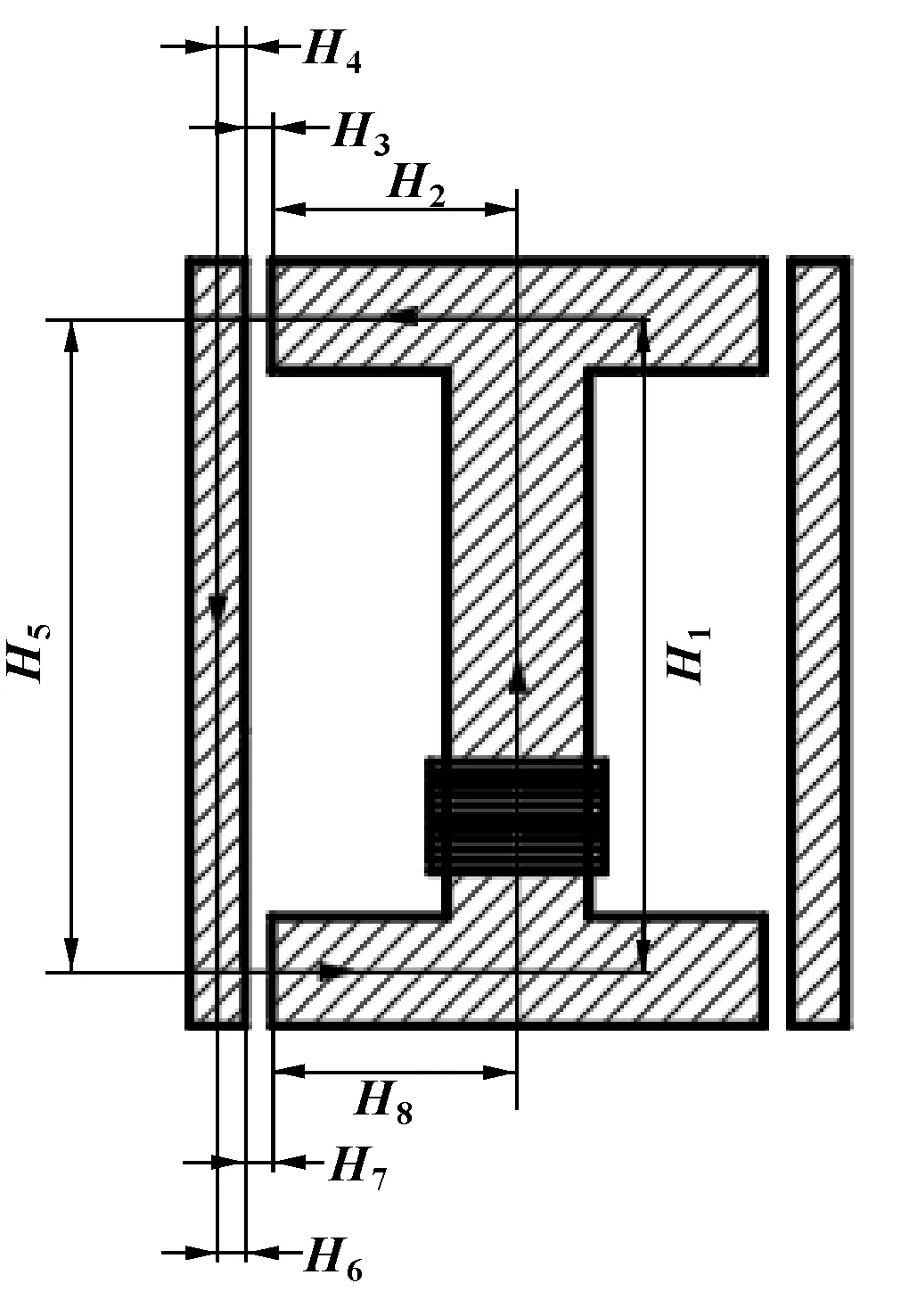
图5 磁路简图
由于磁路为柱形,所以与有关(=2,3,4,6,7,8)。此外,根据图4,有:

(8)
根据文献[12],磁导材料DR530的磁化曲线如图6所示,为DR530的磁感应强度。为其磁场强度。根据图6进行函数表达式的拟合,有:

图6 DR530的磁化曲线
=045lg(+1)
(9)
则对于磁路中的磁导体,有:
=045lg(+1)=1,2,4,5,6,8
(10)
空气的磁导率为(单位:H),气隙的磁感应强度为
==3,7
(11)
根据磁通量定理,有:
==1,2,…,8
(12)
由磁通量互等定理,有:
=======
(13)
联立式(8)、(10)—(13),可得:

(14)

(15)

(16)
通电线圈的匝数为,电流为(单位:A),则由安培环路定理,有:



(17)
将式(14)—式(16)代入式(17),得:



(18)
令:
=+1
(19)
将式(19)代入式(18)并化简,得:


(20)
将式(20)的积分写作面积和的形式,之后可以求得,再联立式(11)(15)可求得气隙中径处的磁场强度:

(21)
磁流变液的剪切屈服强度为(单位:Pa),根据文献[14],气隙中的磁流变液MRF-J屈服剪应力和气隙中径处磁场强度的关系为

10-5708 3×10+0154 2-7
(22)
磁导盘1上下两侧磁流变液的压降Δ由四部分组成:通道面积变小造成的压降Δ、磁流变液屈服极限造成的压降Δ、磁流变液在气隙内流动的沿程压降Δ、通道面积变大造成的压降Δ,压降的单位为Pa。磁流变液MRF-J的动力黏度和密度分别为(单位:Pa·s)和(单位:kg/m)。此外,设:

(23)
根据宾汉流体力学模型,有:

(24)

(25)

(26)

(27)
Δ=Δ+Δ+Δ+Δ
(28)
磁流变液阻尼器的阻尼力为(单位:N),则:
=Δ
(29)
4 数值仿真
为探究空气-磁流变液半主动型动力吸振器的制振效果,对动力吸振器对主系统的制振效果进行了数值仿真,参数如表1所示。

表1 仿真参数
空气-磁流变液半主动型动力吸振器的制振效果如图7所示。可知:当不加装动力吸振器时,系统在外力的作用下,当角频率为276、352 rad/s时,发生共振且主质量的振幅达到最大,分别为0.009、0.009 2 m;当加装动力吸振器时,系统在外力的作用下,当角频率为276、352 rad/s时,同样发生共振且主质量的振幅达到最大,最大幅值分别为0.005、0.005 1 m。这表明,动力吸振器对主质量振幅削减的百分比在不同角频率的激励下是不同的,当系统共振时,其削减的比例最大,达到45%。

图7 空气-磁流变液半主动型动力吸振器的制振效果
5 结论
针对较大振幅削减的带宽制振需求提出了一种具有可变刚度和可变阻尼的空气-磁流变液半主动型动力吸振器。它通过空气弹簧实现可变刚度,通过磁流变液阻尼器实现可变阻尼力。通过气体状态方程求出了刚度、气室初始高度、气室初始气压的函数关系。通过DR530的磁化曲线、安培环路定理、磁通量互等定理、宾汉流体在平板间隙中流动时的压降求得阻尼力和线圈电流的关系。所设计的空气-磁流变液半主动型动力吸振器至多可以削减主质量振幅的45%,可以有效抑制主系统的共振。
