炮位侦察校射雷达TAS与TWS并行运行算法
2022-10-12周永伟宋思盛
姜 洋 周永伟 宋思盛
(西安电子工程研究所 西安 710100)
0 引言
炮位侦察校射雷达在工作时,在其指定工作区域建立搜索屏,当有穿过搜索屏的弹丸目标时,将其捕获并跟踪。一般以TAS方式运行,通常包括搜索、确认、跟踪三种功能的波束,搜索到目标时,发射(2~4)个确认波束获取更多的目标信息,再转入跟踪,文献[1-3]中论述了TAS的最优自适应波束调度算法。实弹射击期间,当搜索屏内有飞行器、飞鸟、车辆、高铁等运动目标时,导致某些个搜索波位不停地搜索到目标并进行确认,跟踪一段时间后判断为非弹丸类目标时,再停止跟踪;之后,又搜索,又确认,如此周而复始,严重浪费系统的时间资源。对服役我国部队的几型炮位侦察校射雷达在演习过程中的调研结果也表明,复杂的战场环境使搜索数据率严重降低,几乎不能再搜索到真正的弹丸目标,无法完成作战任务。
目前,炮位侦察校射雷达在以TAS方式运行时,为了保证搜索数据率,主要采取两种技术手段:一是通过增加雷达能量资源,展宽方位波束宽度使搜索空域内安排更少的波位,从而减小帧扫时间,但是会付出增加雷达设计难度和成本的代价;二是根据目标的某维特征(滤波器号、幅度等)不满足要求时进行硬性抠除,但是以牺牲检测概率为代价的。两种手段能够使数据率得到相应的得益,也要付出一定代价,往往是在得益和代价中寻求一种平衡,不能实际发挥雷达的所有潜力,而且更为复杂环境下,也不能保证完成作战任务。
1 TAS与TWS模式分析
纵观国内外所有雷达,无外乎TAS和TWS两种波束调度方式。
TAS方式利用相控阵雷达灵活的波束调度优势,一边发射搜索波束,一边发射跟踪波束对目标实施跟踪。国内外各型炮位侦察校射雷达绝大多数是以TAS方式设计,该方式对于高速高机动特点的火炮、火箭炮发射的弹丸目标,具有在保证搜索数据率的情况下,使用一层搜索屏就可以将其捕获并跟踪的优点,但是TAS受战场环境影响特别大,若搜索屏内有虚警或非关注运动目标时,搜索数据率会大幅下降,无法完成作战任务。可见,维持搜索数据率是TAS波束调度方式侦校雷达多年以来一直面临的重大问题。
(1)

(2)
由式(1)可知,确认波束是影响数据率的主要成分,若能减少虚警或非关注目标发起的确认波束,将大大提升搜索数据率。
TWS方式与TAS相比,只发射搜索波束,没有确认和跟踪波束,根据目标运动特征进行关联滤波、预测,提取出运动目标而过滤掉杂波数据,完成对目标进行跟踪,多目标能力大大强于TAS,而且它是能保证固定搜索数据率的。弹丸运动过程中,相对雷达俯仰角速度很大,若采用TWS方式,一方面,要保证俯仰上要覆盖相当大的空域保证跟踪点数;另一方面,炮位侦察校射雷达在远区要求的2.5 Hz以上的搜索数据率,近区甚至要求10 Hz以上的数据率,才能保证发现概率。综合来讲,采用TWS方式设计侦校雷达,随着运动目标速度越高,所需付出的能量资源越大,对迫击炮还能应付,对于榴弹炮和火箭炮等高速目标跟踪,是要付出很大设计成本的。
在某些地面侦察雷达中,对TWS建航的航迹,可利用TAS实施精密跟踪,它是利用低速目标特性,在保证TWS的数据率的前提下,对有限的几个航迹进行TAS跟踪,显然该方式也不适用于对付高速目标的炮位侦察校射雷达。
通过以上分析,使用TAS方式设计炮位侦察校射雷达是一种综合优选方案。因此,国内外炮位侦察校射雷达基本都是以TAS方式运行的,当TAS遇到设计瓶颈时,雷达设计师总是希望采用TWS方式的固定数据率优点进行突破,由于受到资源、算法、成本等种种因素的制约,国内并没有这类产品,美军的TPQ-50型侦校雷达以TWS方式设计的炮位侦察校射雷达,但是效果也并不理想。
2 TAS与TWS并行运行算法
本文就针对以上分析的问题,在以TAS方式运行的炮位侦察校射雷达,将TWS嵌入其中,使TAS与TWS有机结合,并行运行于一部炮位侦察校射雷达中。将TWS嵌入后,对原有的TAS波束调度策略、过程不会产生任何影响,而是加大了利用搜索波束检测信息的力度,充分发挥了各自优势。
参照图1,对TAS与TWS并行运行算法如何实现进行叙述。
1)TAS建航航迹存储在TAS跟踪队列(以下简称“A队列”)中,对于A队列中的目标,每跟踪一次即通过运动特征进行目标识别,若判别为非弹丸类目标时,将其从A队列中删除,插入TWS跟踪队列(以下简称“W队列”)中,因航迹已经不在A队列中,所以波束调度器便不再发射跟踪波束。考虑82 mm迫击炮弹、120 mm迫榴炮弹、122 mm榴弹、155 mm榴弹、122 mm火箭弹五种弹丸目标的运动特征,满足以下几种条件时,可认为TAS跟踪的目标为非弹丸目标:①目标经过搜索、确认,解多普勒速度模糊后,多普勒速度<8 m/s;②通过TAS跟踪点(跟踪滤波器收敛,一般可选择5~8)后,垂直方向速度<20 m/s;③计算垂直方向速度的移动平均值,EMA(,)<5 m/s,考虑到弹丸弧顶运行特征,≥12。
2)之后,在时刻发射搜索波束,经过数据处理,得到待确认目标,使用的测量值在W队列中进行检索,确定与W队列中某航迹具有相关的可能时,利用在发射波束时刻的预测值与的测量值计算马式距离,若≤e(e根据雷达自身精度进行确定),则表明是航迹上的一个值,采用更新迭代滤波器,完成一次航迹的TWS跟踪,并将从待确认目标中删除。若波束中仍有其他待确认目标,则重复以上过程,直到所有待确认目标遍历完成。
3)若W队列中的航迹没有在时刻完成一次TWS跟踪,利用与航迹最后一次跟踪时刻进行对比,若超出设定的时间,表明该航迹跟踪结束,将该航迹从W队列中删除。
通过以上步骤,大大降低了对本次搜索进行确认的可能性,不发送确认波束也就大大节省了时间资源,提高了搜索数据率。
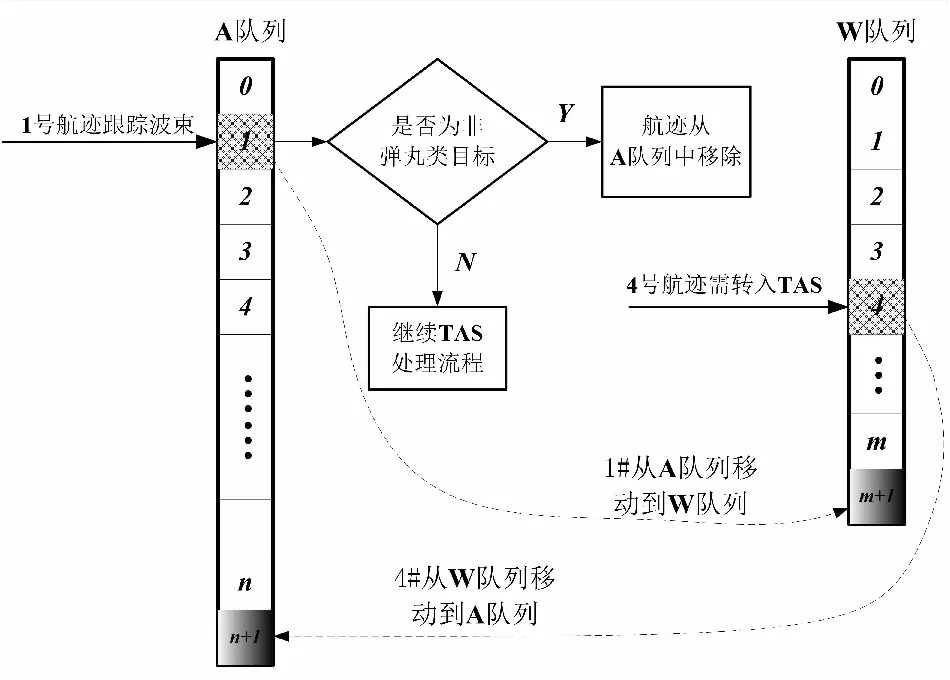
图1 TAS与TWS并行运行示意图
因为TAS模式一般只有一层搜索波束,其覆盖空域较小,TWS航迹在此区域内运动一段时间后,便超出搜索波束的检测范围。因此,每进行一次TWS跟踪后,对其跟踪质量进行评估并及时反馈到终端,当某航迹即将超出检测范围,但操作手认为本航迹对战场态势分析有很大作用,可将其从W队列移动到A队列中,波束调度器再按其运动特性适时发送跟踪波束,确保本航迹持续跟踪下去。同样,操作手也可将A队列中的非弹丸目标移动到W队列中。
3 验证与优点分析
通过以上分析,以TAS方式运行的炮位侦察校射雷达,将TWS嵌入其中,减少了确认波束,根据式(1),能够提高雷达搜索数据率是显而易见的。本算法是在不改变原有TAS的调度策略的前提下,实现TAS与TWS并行运行在炮位侦察校射雷达中,原理正确,实现简便。该算法已应用于某型炮位侦察校射雷达,在实际作战环境下,雷达搜索点迹型显示见图2,图3为TWS跟踪航迹型显示。可见,采用该算法后,图3中正在进行TWS跟踪的航迹,当搜索波束再次发现后,不再进行确认。在图2所显示的强杂波环境下,不使用本文算法时的数据率见图4所示,而在使用本算法后,雷达搜索数据率一直比较稳定的维持在较高数据率的水平上,见图5所示。
通过雷达实际作战环境下的验证,证明该算法原理正确,确实能解决TAS方式运行的炮位侦察校射雷达遇到的问题。而且,该算法还至少具有以下优点:
1)充分发挥了TAS与TWS各自优势,使炮位侦察校射雷达设计不必在TAS与TWS两种方式中纠结;
2)可人为地将航迹跟踪方式在TWS和TAS之间无缝转换;
3)TWS跟踪的航迹在终端中绘制或上报到上级、友邻等战斗部,有利于分析战场态势和满足联合作战的需求,使炮位侦察校射雷达的功能得以扩展;
4)嵌入TWS对TAS波束调度策略、过程不会产生任何影响。因此,可在不增加硬件成本的情况下,仅通过软件升级,就能对现有雷达进行改进,大幅提升雷达适应复杂战场环境的能力;
5)对于一些TWS模式的防空雷达,可以对空域的波束进行稀疏排布,也能减少帧扫时间,提高数据率;
6)大大降低雷达的设计难度和成本。

图2 搜索点迹B型显示
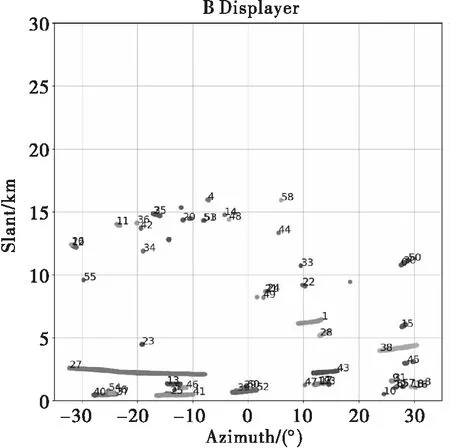
图3 TWS跟踪航迹B型显示

图4 不采用本文算法时的雷达搜索数据率

图5 采用本文算法后的雷达搜索数据率
4 结束语
在炮位侦察校射雷达中,将TWS嵌入TAS中,使TAS与TWS有机结合,并行运行于一部炮位侦察校射雷达中,通过雷达在实际作战环境中验证,大大降低了对非弹丸类目标的确认,提高了搜索数据率,使炮位侦察校射雷达不再受战场中非弹丸类目标的干扰。另外,通过对算法的优点分析,使用该算法也可满足不同的战场需求。