基于双极化通道数据融合的低空风切变风速估计方法
2022-10-12张志宁谢雨桐
李 海 张志宁 周 晔 谢雨桐
(1.中国民航大学天津市智能信号与图像处理重点实验室 天津 300300;2.中国航空工业集团公司雷华电子技术研究所 江苏无锡 214063)
0 引言
机载气象雷达能够实时探测和预警航路上的危险天气。它已成为民用飞机飞行安全的重要电子设备。民航业受到越来越多的关注,民航飞机在长距离、长时间飞行、较高密度起降、快捷运行等方面的使用需求,增加了飞机遭遇危险天气的概率,以及航班延误、航空公司经济损失,由于恶劣天气所造成的人员伤亡和事故越来越严重,民用航空工业对飞机运行时的气象保障要求也越来越高。极化技术可以从机载极化气象雷达回波中获取丰富的极化信息。极化信息的开发和利用能够提高雷达的检测性能,极化信息最初是应用于雨杂波、地/海杂波干扰问题,利用极化信息可以提高雷达系统在各种杂波背景中的目标探测能力。将极化技术应用于机载气象雷达,可获取更丰富的雷达回波信息,通过对雷达回波的极化参量信息的分析,可提高雷达测雨精度,同时获取气象目标的大小、形状、相态等特征,从而来实现精细化的气象目标分类,并能够有效区分极化气象雷达的气象回波和地杂波,以此来解决机载极化气象雷达地杂波抑制难问题。因此,机载双极化气象雷达的研究对于气象目标的检测具有重要意义。
低空风切变具有突发性、短暂性、持续规模小、瞬时强度大、危害性强、难以探测等特点。当民用航空飞机在起降阶段接近低空风切变所存在的区域时,飞行员无法快速改变飞机姿态,从而就会导致民航飞行事故的发生,因此,低空风切变检测技术已成为民用航空领域的一个极其重要的研究内容。低空风切变风速的估计结果直接影响到低空风切变探测的性能,因此准确估计低空风切变风速非常重要。
当机载极化气象雷达在探测风切变时,雷达检测有用信号会受到地杂波的严重影响,在风切变检测之前需要完成地杂波的抑制,风速估计结果由地杂波抑制效果决定。一般的低空风切变风速估计方法包括直接数据域-广义相邻多波束、参数化模型谱估计、模式分析扩展Prony、结合压缩感知以及基于STAP的低空风切变风速估计方法等。综上所述方法在实现时均未利用极化信息。
本文提出了双极化多通道数据融合的低空风切变风速估计方法,该法可以结合不同极化通道的空时信息和极化信息改善杂波抑制性能,达到较好的低空风切变风速结果。该方法首先计算同极化通道和交叉极化通道的地杂波数据的平均功率,从而根据平均功率得到融合矩阵中不同极化通道杂波协方差矩阵的加权系数,其次将加权系数和不同极化通道协方差矩阵相结合得到双极化通道数据融合后的杂波协方差矩阵;然后构建STAP处理器实现对杂波的抑制和归一化多普勒频率估计,最终实现风场速度的准确估计。
1 机载极化气象雷达信号模型
假设机载极化阵列雷达是匀速直线飞行,机载气象雷达阵列天线所在的-轴平面与载机速度方向即轴方向是垂直的。假设阵列天线由元线阵组成,阵元由正交偶极子对组成,沿轴方向均匀放置,间距为=05,其中为波长。假设载机平台速度为,载机所在高度为。而机载极化气象雷达在一个相干处理间隔内脉冲数为。图1中表示的是载机所探测风切变信号的水平方位角;为载机探测风切变信号的俯仰角;是载机探测的低空风切变风场信号的空间锥角,且有cos=coscos成立。在一个脉冲重复周期(CPI)内传感器的同极化通道(HH通道和VV通道)与交叉极化通道(HV和VH通道)接收串相干脉冲数据,采样输出数据构成×的矩阵。

图1 机载极化气象雷达探测低空风切变信号模型
对于不同极化通道(HH、VV、HV和VH通道)而言,一次相干处理时间有个距离单元,假设表示不同极化通道的第个待检测距离单元的×1维空时二维数据,其表达式为
=++(=,,,)
(1)
其中,,,,为HH、VV、HV和VH通道第个待检测距离单元内低空风切变风场产生的雷达回波信号;,,,表示所设模型中HH、VV、HV和VH通道的第个待测距离单元内的地杂波,在此假设地杂波没有起伏也不存在模糊现象;,,,为HH、VV、HV和VH通道加性高斯白噪声。由式(1)得到HH、VV、HV和VH通道第个待检测距离单元的×1维空时数据块为,,,。
不同极化通道第个待检测距离单元内的低空风切变风场回波信号数据为
=·(,)×1
=·()×1⊗()×1(=,,,)
(2)
其中,⊗为Kronecker积;,,,是同极化通道(HH和VV通道)与交叉极化通道(HV和VH通道)第个待测单元的风切变信号的复幅度值;为所假设的机载极化气象雷达信号模型中风切变回波信号的空间锥角值,假设回波信号的空间锥角是已知条件;为同极化通道(HH和VV通道)与交叉极化通道(HV和VH通道)中任一通道的第个待测单元内风切变信号的归一化多普勒频率,该频率取值属于[-1,1];(,)×1为第个待检测单元内的风场回波信号的空时导向矢量;()×1为所设模型中的组成该待检测单元内的风切变信号的时间导向矢量;()×1为所设模型中风切变信号的空间导向矢量,表达式为

(3)

(4)
式(3)中,⊙为哈达玛(Hadamard)积。
()=[1,exp(-2π),…,
exp(-2π(-1))]
(5)
式(5)为该待检测距离单元内低空风切变风场信号的频率扩展函数。
(6)
式(6)为该待检测距离单元内低空风切变风场信号的角度扩展函数。

(7)
式(7)中,表示在低空风切变风场信号的水平方位角方向上的扩展;表示在其俯仰角方向上的扩展。
2 基于双极化通道数据融合的低空风切变风速估计方法
基于双极化通道数据融合的低空风切变风速估计方法利用同极化通道和交叉极化通道数据进行杂波协方差矩阵估计,该方法首先计算同极化通道和交叉极化通道的地杂波数据的平均功率,从而根据平均功率得到融合矩阵的加权系数;其次将加权系数和不同极化通道协方差矩阵相结合得到双极化通道数据融合后的杂波协方差矩阵;接着构建STAP处理器消除杂波,最后完成地杂波抑制并且实现低空风切变风速估计。其中双极化通道数据融合计算杂波协方差矩阵、结合STAP法的低空风切变风速估计是基于双极化通道数据融合的低空风切变风速估计方法的核心内容,下面分别进行论述。
2.1 双极化通道数据融合
双极化通道数据融合需要计算不同极化通道的杂波协方差矩阵,并且通过计算不同极化通道的杂波平均功率确定协方差矩阵的加权系数。最终将协方差矩阵与加权系数融合得到双极化通道数据融合的杂波协方差矩阵。接下来详细介绍不同极化通道协方差矩阵和双极化通道数据融合系数的计算过程。
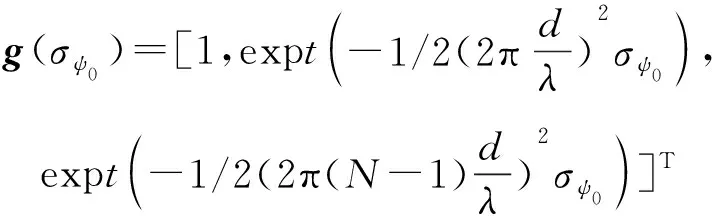
由以上机载极化气象雷达信号模型得到不同极化通道的每个距离单元的接收数据矩阵为
(8)
由式(8)得到HH、VV、HV和VH通道的每个距离单元的接收数据矩阵为,,,。
假设同极化通道(HH和VV)与交叉极化通道(HV和VH)的雷达接收数据都有个距离单元,那么对应的同极化通道(HH和VV)与交叉极化通道(HV和VH)的全部距离单元的雷达接收数据可表示为式(9)。
=[…]
=[…]
=[…]
=[…]
(9)
由式(9)得到HH、VV、HV和VH通道全部距离单元回波数据为,,,。
若选取HH、VV、HV和VH极化通道中任意的一个极化通道的第个距离单元为待检测单元,根据机载极化气象雷达信号模型中得知的先验信息补偿载机运动对回波相位影响,然后估计得到HH、VV、HV和VH极化通道的待测距离单元的杂波协方差矩阵为

(10)
由式(10)可得到HH、VV、HV和VH通道的杂波协方差矩阵,,,。
采用双极化通道数据融合的方法可得到不同极化通道融合后的杂波协方差矩阵。运用不同极化通道的地杂波数据估计杂波协方差矩阵可以增加估计杂波协方差矩阵的样本数,从而得到更加精确的杂波协方差矩阵。而双极化通道数据融合中的杂波协方差矩阵由不同极化通道协方差矩阵与加权系数相乘之后再累加得到,加权系数与不同极化通道功率相关。对每个距离单元的个通道的杂波功率取平均求得当前距离单元的杂波平均功率值。分别对不同极化通道的各个距离单元进行平均求解得到杂波平均功率值。各个极化通道的杂波平均功率计算原理如下:
不同极化通道某个距离单元的回波信号()可表示为如式(11)所示。
()=()e2π(=,,,)
(11)
其中()为不同极化通道接收电压;为载频。
()=e-2π(-)e2π(=,,,)
(12)
则不同极化通道回波信号的电压()可表示为式(13)。
()=e2π(-) (=,,,)
(13)
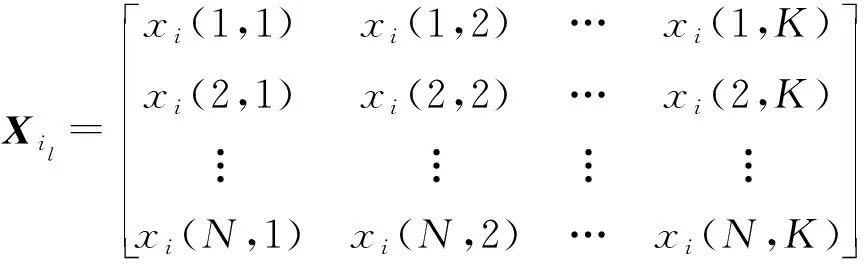
由式(13)可得到HH、VV、HV和VH通道回波信号电压,,,。则HH、VV、HV和VH通道的回波信号的平均功率为
(14)


(15)
在空时二维导向矢量中,每个元素的相位差是由同极化通道(HH和VV通道)和交叉极化通道(HH和VV通道)以及不同脉冲间的地杂波历程差异造成的。故而同极化通道(HH和VV通道)和交叉极化通道(HH和VV通道)具有类似的杂波空时二维分布。综上所述是本文能够进行双极化通道数据融合的理论基础。
考虑互异性的情况下,交叉极化两通道对融合数据的影响是等效的。则由不同极化通道的,,,与式(15)的,,可得到双极化通道数据融合矩阵为

(16)
其中,++=1。

2.2 基于STAP法的风速估计
空时自适应处理器技术可以实现杂波抑制与信号匹配,该技术依据的是地杂波与气象回波的空时耦合特性来实现抑制和匹配。而根据空时最优处理得到的最优处理器实质上可以等效为数学优化问题。由双极化通道数据融合得到极化杂波协方差矩阵之后,设计STAP处理器从而消除地杂波回波信号并进行风速估计。最优权矢量可以通过式(17)求解。
(17)

=⊗
(18)
其中同极化通道(HH和VV)和交叉极化通道(HV和VH)地杂波的空时向量可分别写为

(19)

(20)

由式(17)得到最优权矢量为
(21)


(22)
则第个待检测单元的风场目标速度估计结果为

(23)
3 方法流程
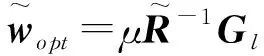
基于双极化通道数据融合的低空风切变风速估计方法流程如图2所示。
图2 基于双极化通道数据融合的低空风切变风速估计方法
本文所提方法能够实现在双极化通道数据融合后的低空风切变风速估计,其步骤如下:
1)步骤1:对同极化通道(HH通道和VV通道)地杂波数据和交叉极化通道(HV通道和VH通道)数据进行双极化通道数据融合;
2)步骤2:计算双极化通道数据融合后的极化地杂波协方差矩阵;
3)步骤3:设计STAP处理器,计算最优权矢量,对双极化通达融合地杂波进行抑制;
4)步骤4:估计待检测距离单元内低空风切变的归一化多普勒频率,从而得出待检测距离单元的风场中心风速估计值。
4 实验结果分析
4.1 仿真条件设置

表1 系统仿真参数
4.2 仿真结果分析
图3展示了同极化通道和交叉极化通道地杂波的距离多普勒图。图3(a)、图3(b)、图3(c)和图3(d)分别为HH通道、VV通道、HV通道和VH 通道的地杂波距离多普勒图,从中可以看出不同极化通道之间的杂波多普勒信息集中在零频附近。
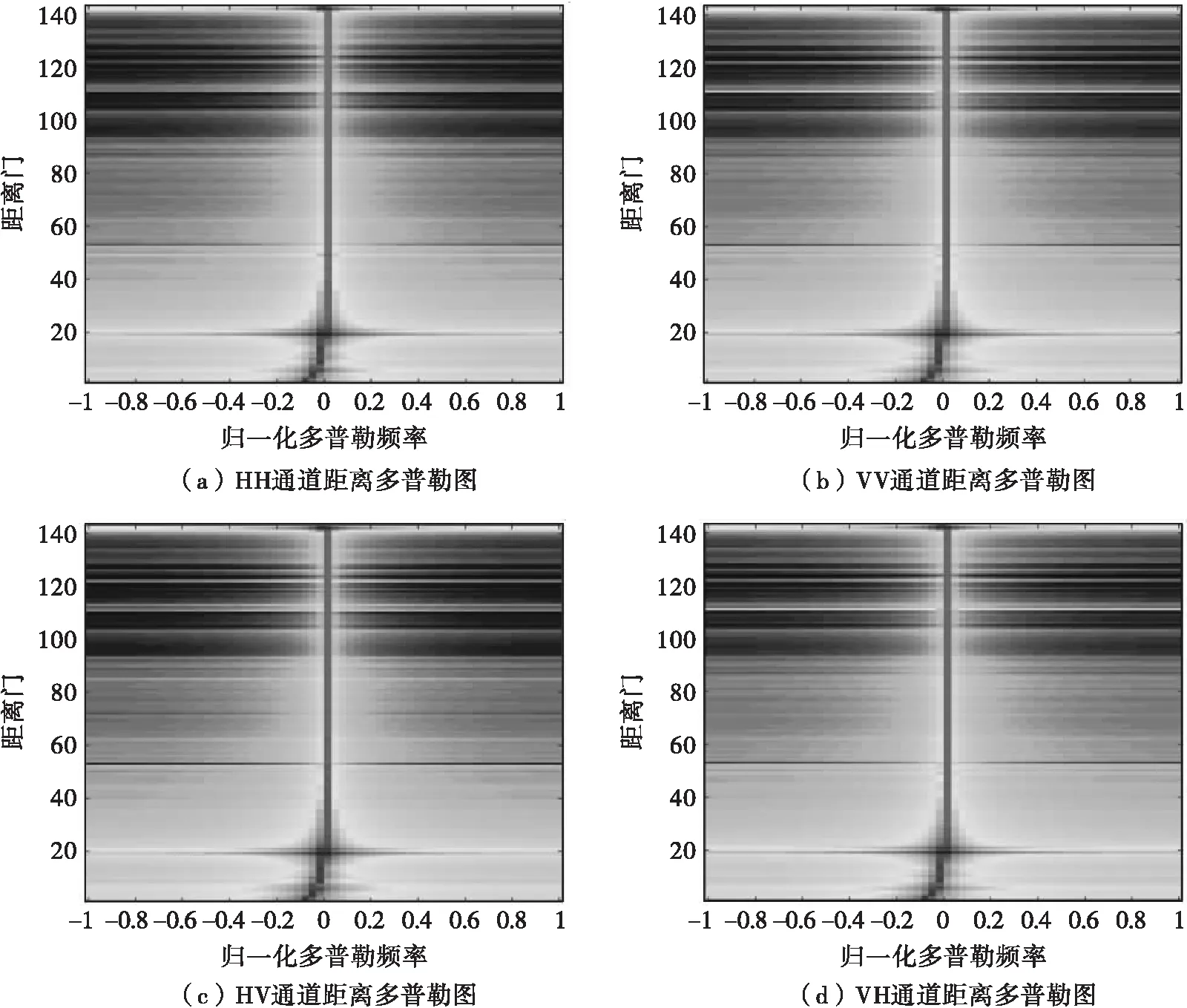
图3 同极化通道和交叉极化通道地杂波距离多普勒图
图4展示了同极化通道(HH通道与VV通道)和交叉极化通道(HV通道与VH通道)的功率对比图,图4(a)和图4(b)对比的是同极化两通道功率及交叉极化两通道功率;图4(c)和图4(d)对比的是交叉极化通道的HV通道与同极化通道的HH通道功率、交叉极化通道的VH通道与同极化通道的VV通道功率。通过对比发现, VV极化通道杂波功率比HH极化通道杂波功率大,而交叉极化通道杂波功率要比同极化通道杂波功率小。
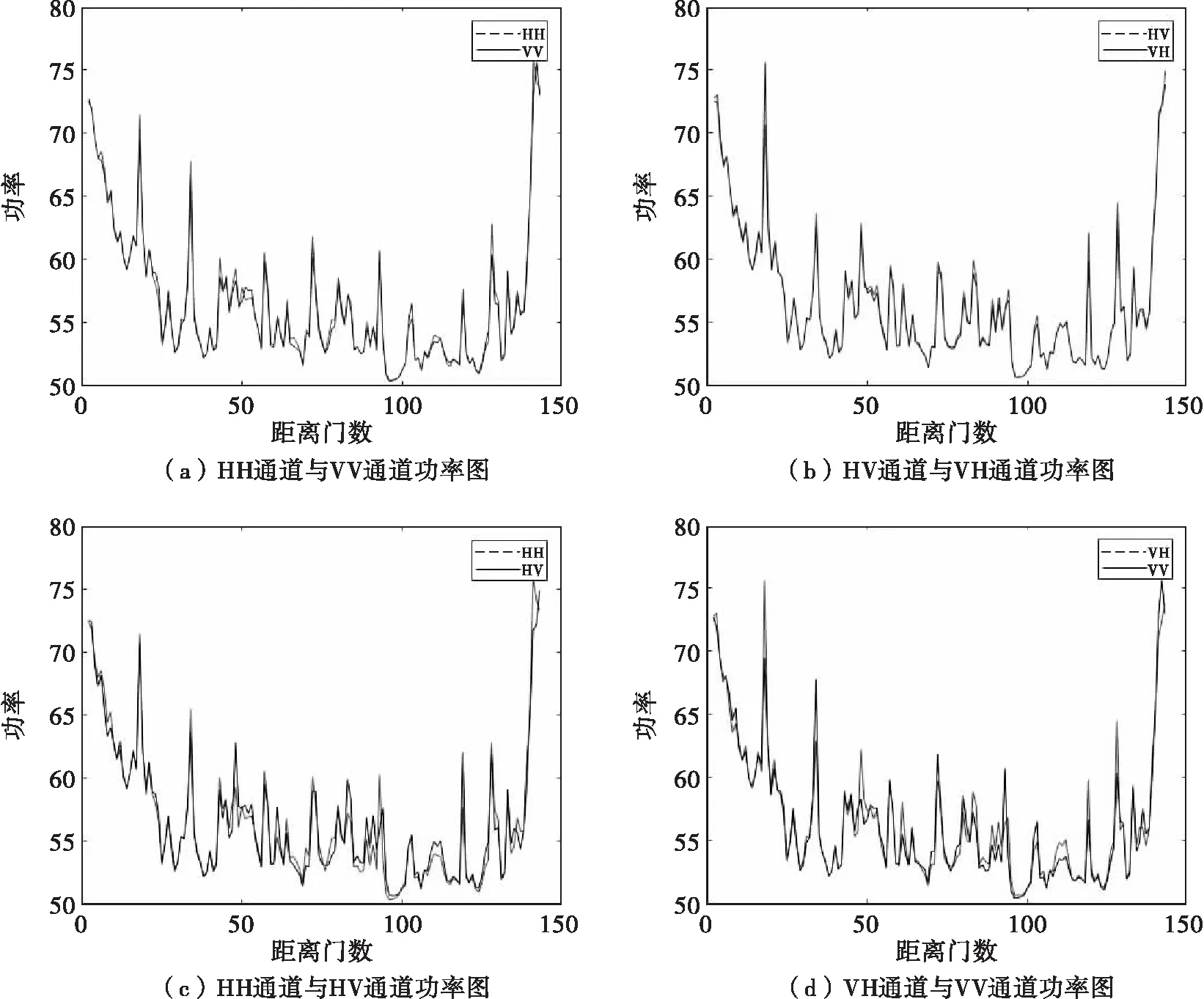
图4 不同极化通道功率对比图
图5所示为VV通道和双极化通道数据融合后的STAP方法的改善因子曲线图。以第64号距离单元为例,从图5中可以看出,双极化通道数据融合后的STAP方法相比于VV通道STAP方法,改善因子曲线在主杂波区凹口更深和更窄,可以更为有效抑制地杂波回波信号。
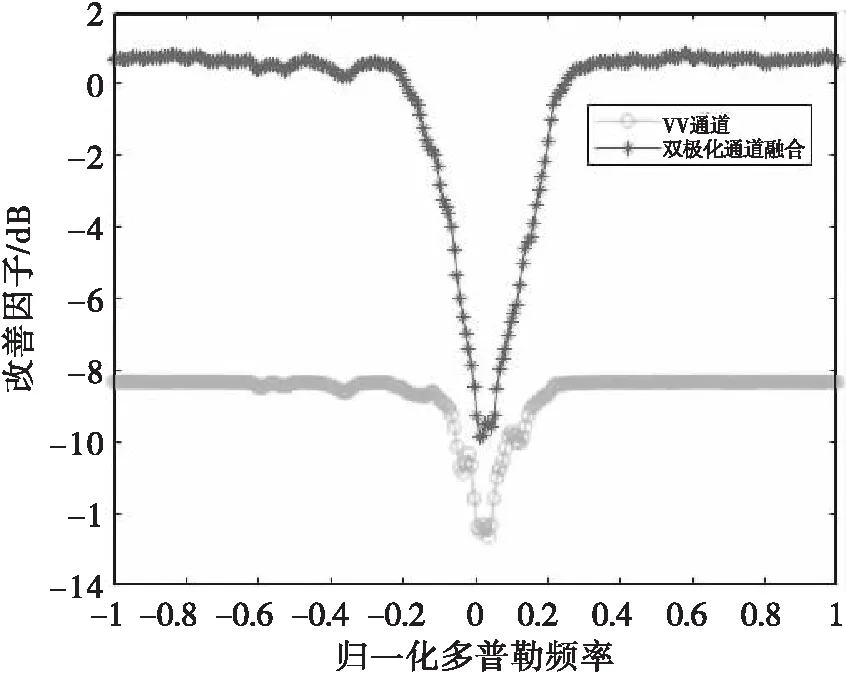
图5 第64号距离单元改善因子曲线图
图6为VV通道和双极化通道数据融合后的STAP方法的低空风切变风速估计对比。从图6中可以看出,对于VV通道使用STAP方法由于样本数不足导致计算的协方差矩阵不够精确,低空风切变风速估计准确度不高。而本文方法可以获得更好的风速估计结果且精度更高,同时在8.5 km~16.5 km低空风切变风场范围内,低空风切变风场风速随距离呈现反“S”型的变化特征。

图6 VV通道与双极化融合通道低空风切变风速估计对比图
5 结束语
仿真实现同极化通道和交叉极化通道地杂波数据的基础上,得知HH通道、VV通道、HV通道和VH 通道之间的空时二维结构在理论上是一致的,而不同极化通道之间杂波功率是存在一定差异的。在此基础上提出了采用平均融合结合不同极化通道功率关系的方法确定双极化通道融合的最佳融合参数,进而获得更加精确的极化杂波协方差矩阵。在融合后的极化杂波协方差矩阵的基础上通过求解STAP处理器的最优权矢量自适应滤波,完成地杂波抑制。最终实现了低空风切变风速估计。最后通过仿真验证了所提方法的有效性。