机载雷达测绘遥感图像下的典型空间信息数据挖掘方法*
2022-10-04张桂莲张东华郑福海
张桂莲,张东华,郑福海
(1.内蒙古自治区测绘地理信息中心,内蒙古自治区 呼和浩特 010010;2.中国地质大学(北京)土地科学技术学院,北京 100083;3.内蒙古农业大学 水利与土木建筑工程学院,内蒙古 呼和浩特 010010;4.自然资源部第二地理信息制图院,黑龙江 哈尔滨 150081)
0 引言
空间信息数据挖掘即在空间数据集合里提取出隐藏知识或空间关系,根据空间属性数据与非空间属性数据,完成空间拓扑关系、方位以及距离等构建,实现空间信息存储与查找.空间信息数据挖掘作为地球信息科学发展的关键环节[1],在自然与社会现象时空变化、动态监测以及时空预测等重要领域中占据着举足轻重的地位.
相关学者也在相关领域取得了一些成果.周国玉[2]等为探究铜陵矿集区姚家岭锌金多金属矿床深部地质,利用全数据模式获取姚家岭矿床的钻孔数据,划分深部数据挖掘范围.定量化分析构建的块体模型三维欧式距离场与空间的相关程度,实现多金属矿床深部空间信息数据挖掘.由于机载激光雷达技术在地理测绘中具有较高的测量勘测精度,可以满足不同测绘环境需求,叶光豪[3]等利用机载激光雷达技术获取点云数据,采用基于地理对象和基于像素的变化检测方法相结合的方法,提供了沙丘的水平变形数据,对监测沙丘变形及其规律具有重要意义,但是其各个监测参数间的匹配度较低.Shi Y[4]等提出了一种新的合成孔径雷达层析成像处理框架,将非局部滤波与合成孔径雷达层析成像反演相结合,以处理这些极小的叠加.该算法的适用性通过使用具有五个双基地干涉图的串联X多基线叠加来证明.该方法采集的建筑物高程数据精度较高,为实现高质量的大规模三维城市地图提供了参考.Hang R[5]等使用两个耦合卷积神经网络(CNN)融合高光谱和光探测与测距(LiDAR)数据.一个CNN用于从高光谱数据中学习光谱空间特征,另一个用于从激光雷达数据中捕获高程信息.该模型在城市数据集和农村数据集上进行了验证,结果表明该方法具有较高的测绘精度.但是由于被测区域地理环境较为复杂,上述两种方法在其他类型空间信息数据挖掘时的精度有待进一步优化.
地理环境较为复杂,诸如人类、动植物、大气、建筑物、地形、地质等影响因素较多,为外界空间信息数据获取与挖掘带来较大难度,空间信息数据方法需整合以往研究经验,扩大自身优势,因此,本文在机载雷达地理测绘遥感图像中,构建一种空间信息数据挖掘方法.其关键之处在于归一化处理初始数据,避免较大数据对较小数据产生过大的抑制作用;应用模糊神经网络展开空间信息数据挖掘,增加挖掘精度.创新之处在于引用模糊神经网络算法,在地理信息系统数据库中进行模糊神经网络参数与结构的自适应调整,使存入的空间信息数据参数间的匹配度和自适应性较高,为以机载雷达遥感图像为基础的典型空间测绘工作提供参考.
1 机载雷达测绘遥感图像中的空间信息采集
采集机载雷达测绘遥感图像中的空间信息时,主要利用动态差分GPS(Global Positioning System,全球定位系统)接收机、姿态测量装置、激光测距仪、CCD相机等装置.采集过程中,将飞机作为雷达的观测平台,采用激光扫描测距技术,通过传感器同步获取包含地球表面的三维空间信息与少量的红外光谱信息的遥感图像.
1.1 遥感图像中的对地定位信息采集
已知定位模是S、方向是(φ,ω,κ)的向量存在于空间中,假设目标向量起点Os与另一端点P的坐标为(Xs,Ys,Zs)和(X,Y,Z),当测量得到起点坐标Os后,端点P的坐标也可明确.根据采集的机载雷达测绘遥感图像,设定遥感器光学系统投影中心是起点Os,利用动态差分GPS接收机测得起点Os坐标数据;机载雷达测距仪测量投影中心与地面雷达脚点的间距是向量模S,通过雷达测距系统测得间距值,同时,采用姿态测量装置测得姿态参数(φ,ω,κ).对于雷达扫描设备倾斜角、仰俯角、航偏角以及针对GPS天线相位中心的雷达测距光学投影中心偏差等诸多系统相关参数,可分别通过对应的参数检校策略进行确定.对地定位示意图如图1和图2所示.
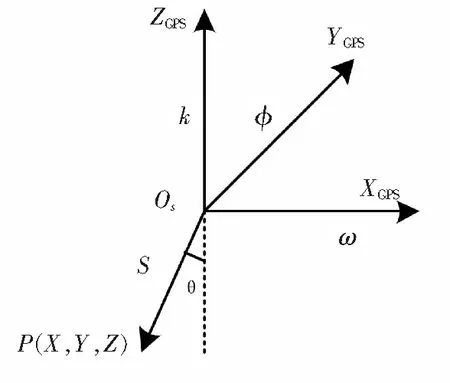
图1 对地定位示意图Fig.1 Schematic diagram of ground positioning

图2 机载雷达系统扫描示意图Fig.2 Scanning diagram of airborne radar system
为使数据不失一般性,采取线扫描形式获取地理信息.设定端点P为地面任意一点,扫描设备是Os,针对扫描中心线而言点P的角度为θ,则采用下列计算公式求解地面点P坐标:
(1)
式中,a1=cosφcosκ-sinφsinωsinκ、a2=-cosφsinκ-sinφsinωcosκ、a3=-sinφcosω、b1=cosωsinκ、b2=cosωcosκ、b3=-sinω、c1=sinφcosλ+cosφsinωsinκ、c2=-sinφsinκ+cosφsinωcosκ、c3=cosφcosω.以此获得对地定位结果,如图3所示.
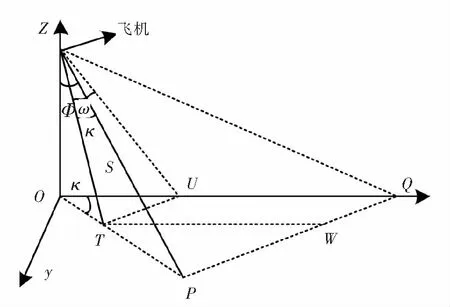
图3 线扫描模式下对地定位示意图Fig.3 Schematic diagram of ground positioning in line scanning mode
1.2 遥感图像中的空间测距信息采集
机载激光雷达将无线电波发射至空中,系统接收器接收被物体与空气反射过的无线电波,形成用于描述物体与雷达间距的雷达信号.
在采集的遥感图像中,根据空气中光的传播速度,量测、给定距离中光的往返传播时间,完成遥感图像中的距离值计算.
假设在一定距离内光波用t时长完成往返传播,雷达发射点与反射点的几何间距是ρ,真空里光波传播速度是c,通常取值300 000 km/s,则待测距离的计算公式如下所示:
(2)
若测距系统测量分辨率为Δt,则采用下列表达式界定雷达测距距离分辨率:
(3)
利用图4所示的脉冲法实现雷达脉冲往返传播时间测量[6].

图4 基于脉冲法的雷达脉冲往返传播时间量测示意图Fig.4 Schematic diagram of radar pulse round trip propagation time measurement based on pulse method
1.3 遥感图像中空间雷达脚点距离信息采集
由于单激光脉冲的一次回波只能获取当前飞机航线下一条扫描线的回波信息,因此采用机械装置按照线扫描、圆锥扫描以及纤维光学阵列扫描等不同方式展开作业,如图5所示,以得到包含一定带宽的雷达脚点距离信息.在遥感图像中,该特征的具体提取方法描述如下:
(1)线扫描:通过摆动、旋转扫描镜,以“Z”字形扫描地面,若对扫描线进行调整,则能够转变为平行线等其他形式;
(2)圆锥扫描:将扫描反射镜倾斜,得到一个旋转轴与发射设备的激光束呈45°夹角的镜面倾角,当飞机观测平台移动时,地面上将出现多个重叠的椭圆形光斑;
(3)纤维光学阵列扫描:将光纤按直线排列,在地上形成平行光斑或“Z”字形光斑.若光斑为平行光斑,则扫描线点距越短,间隔越大;若光斑为“Z”字形模式,则扫描仪在摆动扫描时可缩小扫描线之间的距离.
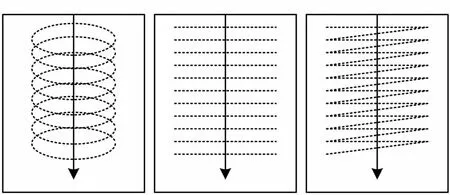
图5 各扫描形式下遥感图像脚点阵列形式示意图Fig.5 Schematic diagram of foot array form of remote sensing image under various scanning forms
2 遥感图像中的空间信息数据挖掘算法设计
基于第2节利用动态差分GPS接收机、激光测距仪等装置采集的空间信息数据,为了保证数据挖掘效果,本文设计一种模糊神经网络对其展开数据挖掘,探索空间信息数据的隐藏知识.根据模糊神经网络特征,将空间信息数据挖掘步骤划分成以下5个阶段[7]:
(1)空间信息数据选取:把上文机载雷达遥感图像测得的空间信息数据存储至GIS(Geographic Information System,地理信息系统)数据库中[8].在可视化阶段中利用矩形或圆形等选择工具,利用GIS数据库的查询功能,完成数据库的空间样本数据提取;
(2)空间信息数据预处理:进一步加工提取出的空间样本数据,判定数据的完整性与一致性,并去除数据中的噪声数据.当数据存在较大变化时,通过下列表达式归一化处理初始数据,避免较大数据对较小数据产生过大的抑制作用:
(4)
式中,相关参数ξ的极值分别是ξmax、ξmin.
(3)训练数据集架构:在数据库中存入经过预处理的空间信息数据,设定选取的空间实体特征集合为A=(A1,A2,…,An),第i个空间实体的属性值值域是dom(Ai),若实体的分类类别数量是m,则其类别集合为C=(C1,C2,…,Cm),综合以上,采用下列表达式描述构建的(n+1)元组训练数据集:
AC=(a1,a2,…,an,ck),
(5)
式中,ai∈dom(Ai),ck∈C,其中,1≤i≤n,1≤k≤m.
划分给定数据为训练数据组T与检验数据组T′,训练数据组所含数据个数是N,则(a1,a2,…,an)是相对于训练数据组中各(n+1)元组数据的n个输入变量元,此数据的最佳输出用ck表示,其同时与是包含特征(a1,a2,…,an)的实体所属种类;
(4)模糊神经网络构建与训练:其中,式(6)为多输入单输出的模糊神经网络结构,式(7)为模糊神经网络的输入输出关系表达式,该关联中含有的模糊规则数量为m:
ψ(k)=f(ξ(k)),
(6)
(7)
采用基于密度峰值和近邻优化的聚类算法[9],自适应调整模糊神经网络参数与结构,通过学习预处理后的(n+1)元组训练数据来训练模糊神经网络,达成非线性数学映射.模糊化输入变量后[10],机载雷达地理测绘遥感图像内,典型空间被测目标的坐标系可迭代反演,即依据智能雷达坐标系与机载典型被测空间坐标系关系,将训练后的参数放入典型空间中,获取数据隐藏知识,提高数据参数间的匹配度和自适应性,具体步骤如下:
将机载雷达测绘遥感图像中的数据转换成被测目标的绝对信息,找出被测目标的方位及位置坐标.检测被测目标的系统中含有智能雷达坐标系Ob,Xb,Yb,Zb、机载典型被测空间坐标系Ol,Xl,Yl,Zl两种坐标系,如图6所示.
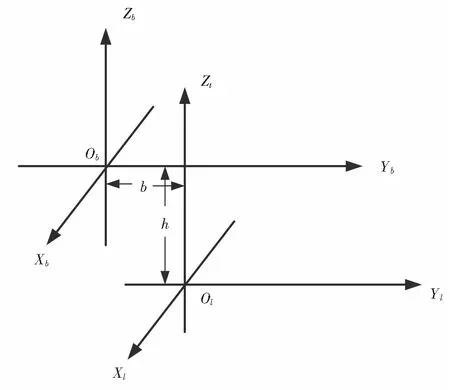
图6 智能雷达坐标系与机载典型被测空间坐标系关系Fig.6 Relationship between intelligent radar coordinate system and typical airborne measured space coordinate system
图6中,h为Ob和Ol沿Z轴的差值b,为Ob和Ol沿Y轴的差值.典型被测空间坐标系(Ol,Xl,Yl,Zl)为以机载雷达测绘遥感图像Ol为原点的坐标轴,Xl、Yl和Zl分别为沿被测方向向右、正前方和垂直于地面的三维坐标轴.智能雷达坐标系(Ob,Xb,Yb,Zb)是以北斗卫星定位仪Ob为圆心的坐标轴,Xb、Yb和Zb为向右、正前方和垂直于地面的三维坐标轴.
将极坐标(ρ,θ)转换成典型被测空间坐标系下的三维激光扫描平面坐标(xL,yL),被测目标的坐标为(ol,xl,yl),如图7所示.

图7 机载雷达地理测距原理图Fig.7 Schematic diagram of airborne radar geographic ranging
图7中,ol为机载雷达测绘遥感图像中心,机载雷达测绘遥感图像的测绘方向从-135°扫描到135°,得出坐标系的公式为:
(8)
其中:θ为xL轴与激光光束间的夹角;ρ为初始点距被测目标的距离.
(5)数据验证与评估:验证数据有效性,当符合误差最小化标准时,模糊神经网络训练完成;否则,对训练数据组进行调整并展开迭代训练,直到满足最小误差标准.
综上所述,空间信息数据挖掘的输入项是待测实体特征(a1,a2,…,an),所求结果即为模糊神经网络输出ck.
3 空间信息数据挖掘实例分析
根据第3部分模糊神经网络的输出,完成了机载雷达测绘遥感图像下的典型空间信息数据挖掘.为进一步验证所提方法的实用性,在三维激光雷达参数设置、确定研究区域和航线敷设设计三个方面的准备基础上,从机载雷达遥感图像的测绘精度、空间信息数据挖掘效果两个方面进行分析,具体结果如下.
3.1 准备阶段
通过OPTECH ALTM Gemini的机载三维激光扫描雷达实现机载雷达遥感图像采集过程,其设备参数如表1所示.
通过航摄准备、航空摄影、数据处理、精度检测等步骤制定某项目测绘流程.采用飞行高度约6 500 m的双发单翼飞机作为Y-12航摄平台,在航线中以260 km/h的平均地速进行平稳量测.根据研究区域当前民航机场状况,将主要飞行基地布设为某桥机场.采集的遥感图像如图8所示.
按照表2所示的参数展开航线敷设.
3.2 机载雷达遥感图像的测绘精度分析
利用全站仪等测量设备,按照勘测规范与外业数字测图技术规程,对比DOM(Digital Orthophoto Map,数字正射影像图)、DEM(Digital Elevation Model,数字高程模型)各控制点的数据精度,并根据内业矢量与外业调绘巡检结果,比较部分地物点和高程误差.测绘结果如下列表3至表6所示.
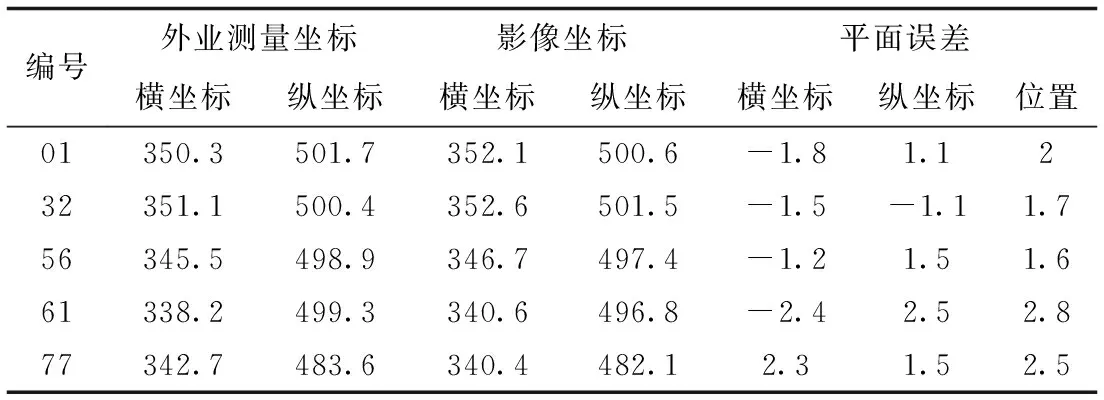
表3 DOM控制点平面点位测绘准度(单位:m)
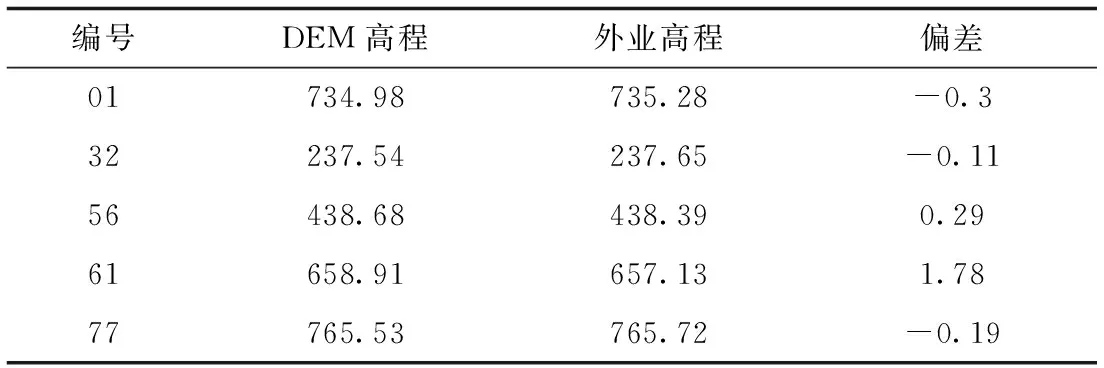
表4 DEM控制点高程测绘准度(单位:m)

表5 外业调绘地物点点位平面测绘准度(单位:m)
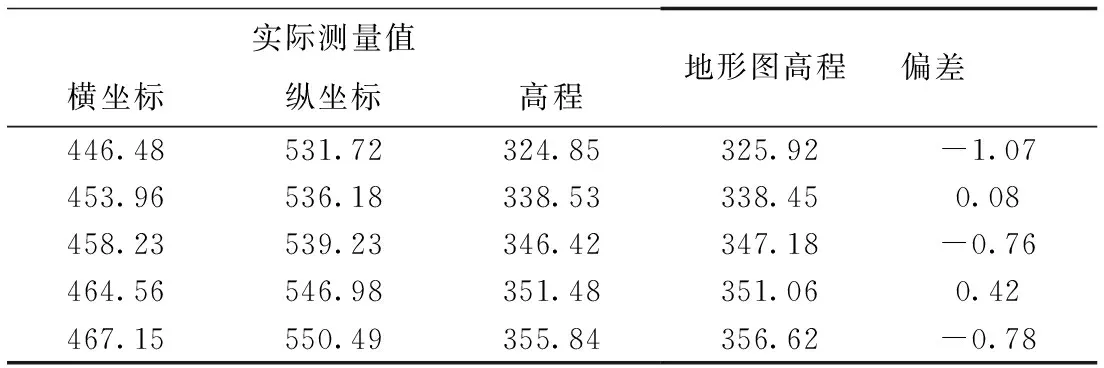
表6 外业调绘地物点高程测绘准度(单位:m)
结合上列各表中数据可以看出,在遥感图像中,基于DOM、DEM控制点平面点位与高程的实测值与量测值偏差较小,其中,DOM控制点平面点位测绘位置平面误差低于2.8 m,DEM控制点高程测绘偏差低于1.78 m.外业调绘地物点平面点位与高程的实测值与量测值也保持较高的测绘准度,偏差分别低于1.4 m和1.07 m,且四类误差都极大程度低于勘测规范与外业数字测图技术规范中的对应测量要求.这是因为本文方法采用机载激光雷达地理测绘遥感图像,大幅提升控制点与地物点测量精度,数据挖掘后的自适应性特性得到凸显.
3.3 空间信息数据挖掘效果
通过采集地形图、航片以及专题制图器(Thematic Mapper,TM)遥感影像,得到研究区域不同时相的空间信息数据,利用手工屏幕数字化与NDBI(归一化建筑指数)策略,提取区域边界,架构空间数据库,经预处理与网络训练后,实现空间信息数据挖掘,探索隐藏知识,预测该区域所处地域的边界扩展情况.如图9所示:

图9 时空信息数据挖掘结果Fig.9 Spatiotemporal information data mining results
表7所示为该区域在不同年份的区域预测面积结果.

表7 研究区域预测面积数据统计表
根据研究区域预测面积数据统计结果可知,城市的形成、发展与地理因素间存在着密不可分的相关性,对空间扩展潜力、方向与速度均有较大影响力,因该区域所处的城市形态极大程度受限于黄河、低山丘陵等地形条件,故廊道式扩展趋势显著,扩展率在0.56%~1.82%之间波动.以上说明该区域所处地域边界扩展预测结果具备合理性,这是因为经过学习预处理后的训练数据可以将智能雷达坐标系与机载典型被测空间坐标系关系具体化,提高参数间的匹配度,空间信息数据挖掘效果较为理想,能够有效预测空间发展趋势.
4 结 论
机载雷达遥感测绘技术是一种集激光全球定位系统、惯性导航系统于一身的数据采集技术,拥有诸多优势,比如高度自动化、较强的天气干扰抑制能力、较短生产周期以及较高精准度等.因此,本文将机载雷达遥感测绘技术与空间数据挖掘相结合,提出一种新型的挖掘方法,其坐标系间的转换、参数间的匹配度、训练数据的自适应性皆得到保证,进而提升机载雷达地理测绘数据的可用性.
当数据为全波形时,极易被外界因素影响,无法理想分解波形,且目前还没有成熟的数学证明能够描述除植被外的地物结构特征,这将是下一阶段的研究重点;应采用新型滤波方法提升数据预处理质量与数据挖掘精度;着重研究空间数据挖掘方法与人机交互技术的有机集成;需基于机载雷达地理测绘技术,设计出与不同形式空间数据库、不同种类知识相对应的空间数据挖掘策略,扩展适用性.
