用于汽车的户外自动搬运小车
2022-09-30刘建德
□ 刘建德
安吉智能物联技术有限公司 上海 202157
1 设计背景
在汽车整车厂内部,需要对汽车进行搬运。人工驾驶驳运需要人员数量多,用人成本高,并且失误率高,新车碰擦概率高,交通事故率也高。人工驳运操作的一致性较低,车辆停放位置容易出错,降低库存管理的效率、精准性。目前,用于汽车的室内自动搬运小车已经较为常见,但是用于全天候户外汽车驳运的自动搬运小车仍较为罕见,尚无成熟投入商用的用于汽车的户外自动搬运小车系统。对此,设计了一款在户外可以代替人工短途驳运汽车的自动搬运小车,司机只需要将汽车停在外部缓冲区,由自动搬运小车将汽车驳运入库,同时可以准确快速查找汽车停放的具体位置。此项技术在商场、医院、机场等民用停车场所也具备较好的推广价值。
2 结构
户外自动搬运小车整车外形为C字形,质量约为6.5 t,负载为3.6 t,由车体与夹抱机构两部分组成,如图1所示。夹抱机构通过螺栓连接在车体的升降机构上,升降机构的举升高度为2 380 mm。在汽车整车厂,户外停车位为上下两层钢架结构,需要在第二层驳运汽车时,将升降机构上升到2 380 mm高度。驳运地面层的汽车时,户外自动搬运小车从停车位的一端驶入,将停车位上的汽车完全包裹,安装在车体上的夹抱机构分别夹住汽车的四个轮胎,通过升降机构将汽车抬离地面,然后将汽车运送到指定停放位置。

▲图1 户外自动搬运小车结构
车体结构如图2所示。升降门架由Q235钢板焊接而成,在升降门架最顶端安装有一根横梁,用于安装信号指示灯及实时差分定位接收器等辅助装置。在满足强度要求的情况下,升降门架中间是镂空的,用于减轻质量。车体框架同样由Q235钢板焊接而成,焊接完成后与升降门架焊接为一体,作为底盘。
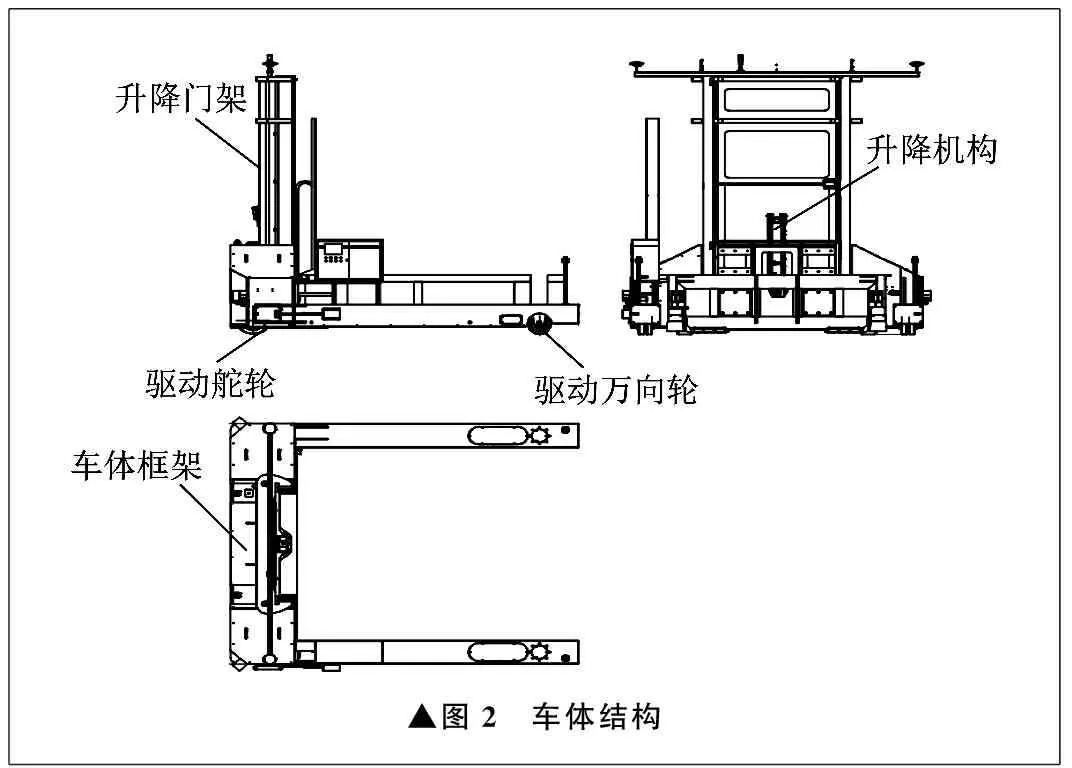
▲图2 车体结构
3 驱动系统
户外自动搬运小车的底盘上安装有两个驱动舵轮和两个驱动万向轮,车体质量为5 t,行驶时必须克服各种阻力,主要为摩擦阻力、坡道阻力、惯性阻力。
滚动摩擦阻力Ff为:
Ff=f(Q+G)cosα
(1)
式中:f为摩擦因数,取0.1;α为坡道坡度,取0;Q为
最大载重力;G为车体重力。
惯性阻力Fj为:
Fj=δ(Q+G)a/g
(2)
式中:δ为旋转质量加速因数,取1.1;g为重力加速度;a为车体加速度。
牵引力F为:
F=Ff+Fj
(3)
计算得牵引力F为10 360 N。
扭矩M为:
M=FR
(4)
式中:R为驱动舵轮半径,为225 mm。
由于户外自动搬运小车自身质量较大,车速较低,因此略去车轮等旋转部件的惯性,计算得到扭矩M为2 331 N·m。
户外自动搬运小车行驶速度为9 km/h,根据行驶速度和驱动舵轮参数反推得到转速n为106 r/min。
额定功率P为:
P=Mn/9 550
(5)
计算得额定功率P为25.87 kW。
总功率Pt为:
Pt=P/η
(6)
式中:η为传动效率,取0.85。
计算得总功率Pt为30.4 kW。
两个驱动万向轮使用电机驱动,实现同步行走及横移功能。四个电机同步驱动,因此每个电机的平均功率约为8 kW。升降机构通过滚轮卡在升降门架的导槽内,液压缸连接在升降机构上,从而带动升降机构实现上下自由运动,举升高度为2 380 mm。
4 液压系统
液压站驱动电机的功率为16 kW,用于提供举升动力。液压系统采用5 t叉车现有技术,属于整体外购件。首先明确设计要求,初步确定液压执行元件,绘制液压系统工况图,根据载荷大小确定系统工作压力。然后根据已确定的液压执行元件,选择合适的方向控制、速度换接、差动连接回路,以实现对执行元件的控制。最后草拟液压原理图,计算执行元件的主要参数,根据液压系统载荷图和系统工作压力,计算液压缸内径、活塞杆直径、柱塞缸内径和柱塞杆直径。
液压缸内径Di计算式为:
(7)
式中:i为液压缸代号,1代表合模缸,2代表注射座移动缸,3代表注射缸,4代表顶出缸;Fn为液压缸载荷;p为液压缸压强;ηy为液压缸效率,取0.95。
在液压泵选用手册中,一般同时给出额定工况下液压泵的驱动功率,也可以按照液压泵的实际使用情况计算液压泵的驱动功率Py:
(8)
式中:ψ为转换因数,恒功率变量液压泵取0.4,限压式变量液压泵取0.85;Pn为液压泵额定压力;Qn为液压泵额定流量;ηp为液压泵总效率。
5 夹抱机构
夹抱机构结构如图3 所示,由机架和四组夹抱组件共同组成。机架由矩通管和Q235钢板焊接而成。
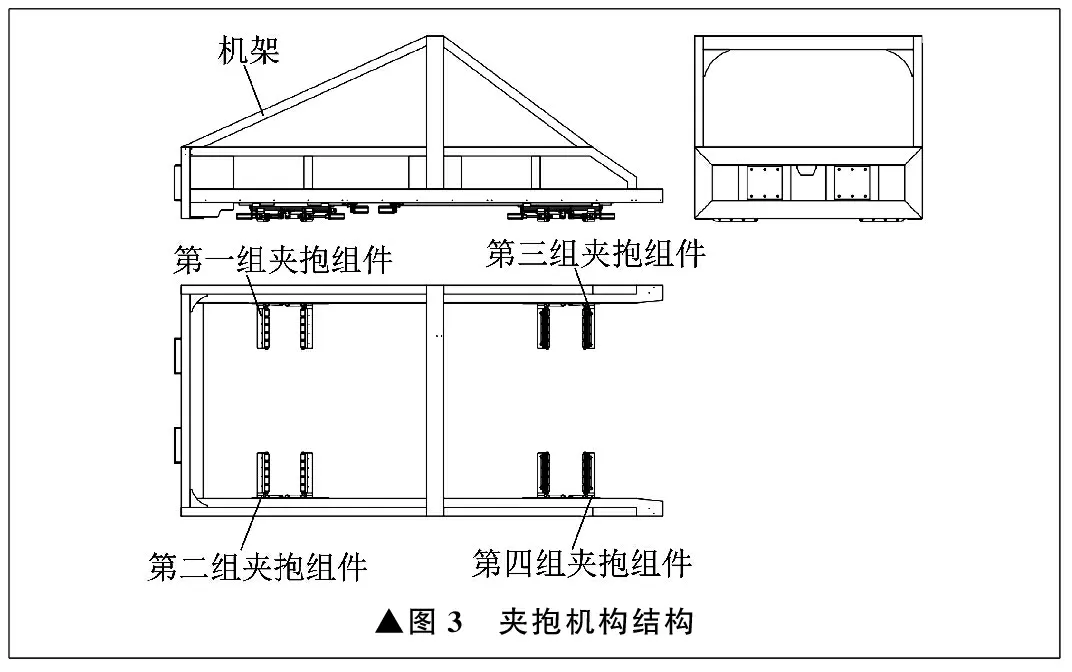
▲图3 夹抱机构结构
夹抱组件结构如图4所示。每一组夹抱组件都由两根抱夹杆组成,每根抱夹杆上安装有滚轮与感应装置。当抱夹杆在运动过程中与轮胎接触时,滚轮相对于汽车轮胎可以转动,能够有效防止轮胎磨损。当滚轮与轮胎接触后,安装在抱夹杆上的感应装置同时与轮胎接触,发出停止信号,抱夹杆运动到指定位置,随即停止运动。
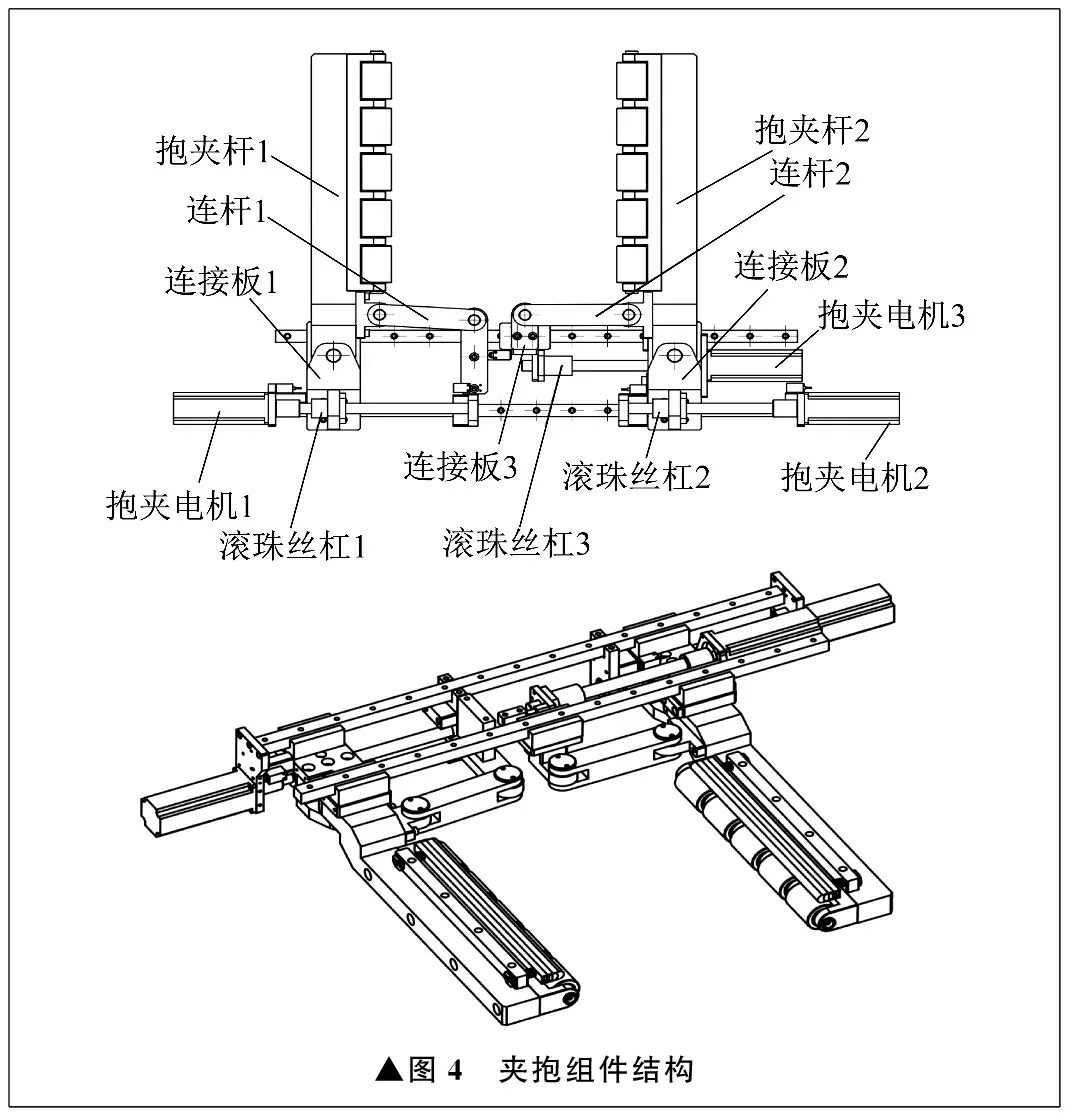
▲图4 夹抱组件结构
汽车最大质量为2.5 t,假设四组抱夹杆承受的载荷一致,那么每组抱夹杆承受的压力为6 125 N。以汽车轮胎最小直径为例,两个抱夹杆与轮胎的相切面夹角为42°,则单根抱夹杆的压力为2 914 N。根据杠杆原理,反推到滚珠丝杠螺母上的推力为5 828 N。
导程Ph满足:
Ph≥Vmax/nmax
(9)
式中:Vmax为丝杠副最大移动速度;nmax为丝杠副最大相对转速。
计算得导程Ph不小于10 mm。
滚珠丝杠底径d计算式为:
d2=a12F0L/δm
(10)
式中:a1为支撑方式因数,一端固定一端自由支撑方式时取0.078,两端固定或铰支支撑方式时取0.039;F0为导轨静摩擦力;L为滚珠丝杠两轴承支点间距离,取1.1~1.2倍行程加10~14倍导程Ph;δm为滚珠丝杠允许最大轴向变形。
夹抱组件原理如图5所示。抱夹电机B2驱动滚珠丝杠做直线往复运动。在丝杠螺母上安装有连接板,在连接板上安装有轴承支点,抱夹杆A2通过轴承支点与连接板连接。连接板与丝杠螺母做直线运动时,抱夹杆A2绕轴承支点做回转运动,从而实现对轮胎的夹抱动作。抱夹杆A2的摆动范围是0°~90°。抱夹电机B2与抱夹电机B12同步,抱夹电机B1与抱夹电机B11同步,抱夹电机B3与抱夹电机B10同步,抱夹电机B6与抱夹电机B9同步,抱夹电机B5与抱夹电机B8同步,抱夹电机B4与抱夹电机B7同步。
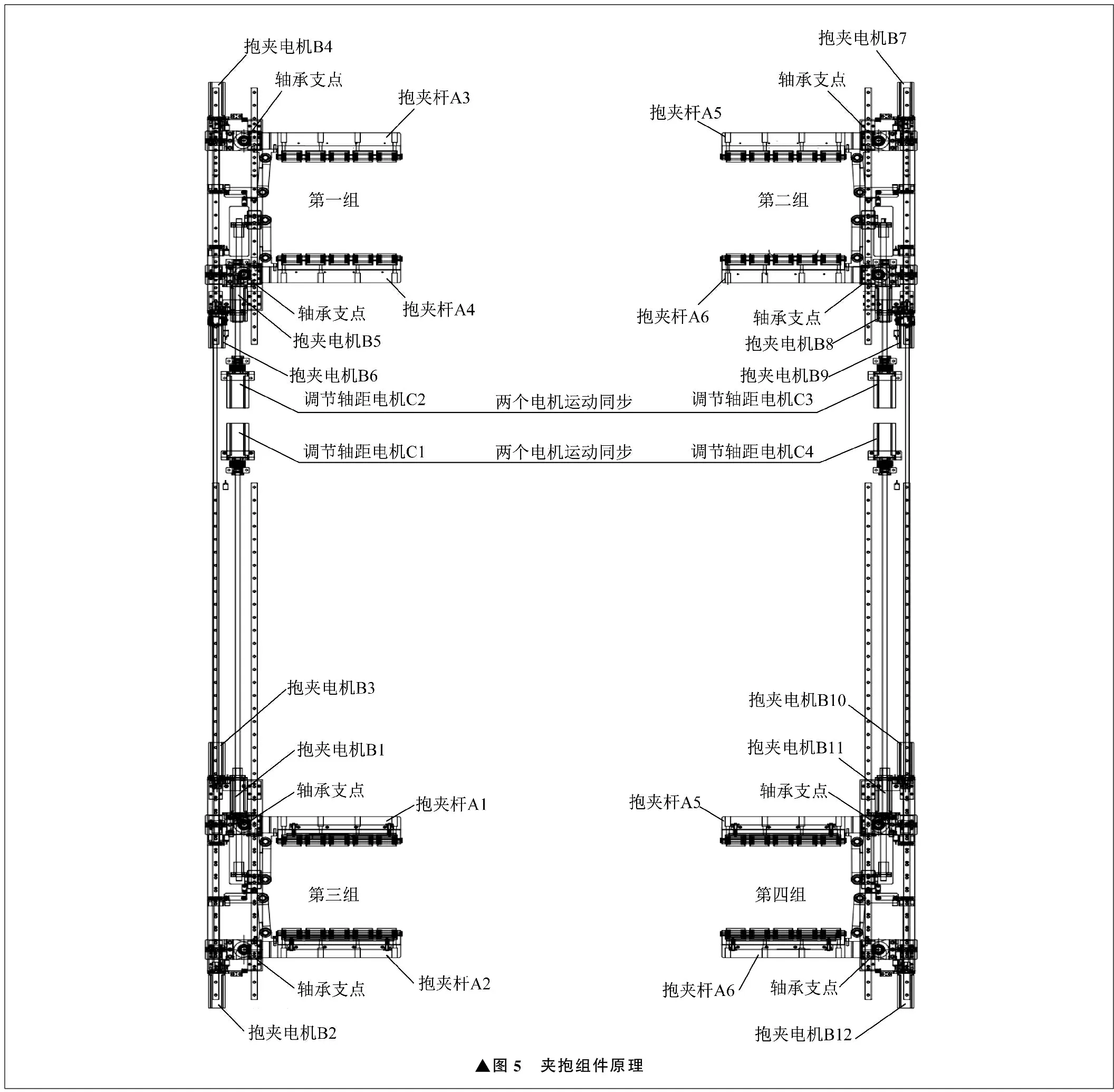
▲图5 夹抱组件原理
为了适应不同直径的轮胎,每一组夹抱组件都可以独立调节夹抱距离。四个调节轴距电机分别带动滚珠丝杠做轴向往复运动,以达到调节轴向距离的目的。其中,调节轴距电机C1与调节轴距电机C4同步,调节轴距电机C2与调节轴距电机C3同步。
6 控制系统
控制系统采用实时动态载波相位差分技术、高精度惯性导航系统、里程计、激光等多传感器融合算法,实现导航定位。
针对驾驶员将汽车停偏的情况,利用机器学习、模糊识别、点云配准等智能技术,自动调整户外自动搬运小车的姿态,使其自动、精确对准汽车。
在户外自动搬运小车驳运汽车的过程中,根据轴距自动调整抱夹杆的间距,并自动找准汽车的前后轮位置,利用四个抱夹杆自动夹抱汽车的四个轮胎,不伤害汽车,不需要新增搬运容器。
采用双舵轮全向驱动机构,由两个驱动万向轮辅助,可以实现直行、横移、蟹行、原地旋转、曲线运动等,特别适用于狭窄空间的移动,同时对地面要求不高。
在户外全天候工况下,户外自动搬运小车的运动控制精度可以高于2 cm。针对雨、雪、雾、霾及粉尘等恶劣天气和低空飞行飞虫等的干扰,采用烟雾滤波、颗粒滤波、特殊物体识别及滤波算法等,提高户外自动搬运小车的稳定性。
7 结束语
汽车产业是国家的支柱产业,也是当今世界机器人技术使用密度最高的领域之一,降成本增效率始终是汽车产业的主旋律。目前,国内各大汽车厂商露天商品车仓库自动化、数字化还处于较低水平,制约了降本增效的空间。用于汽车的户外自动搬运小车的开发,不仅节约人力,而且可以使汽车整车成本降低,提高竞争力。公共停车场引入这一户外自动搬运小车,可以大大节约存取车时间。由此可见,所设计的用于汽车的户外自动搬运小车具有较高的使用价值和广阔的推广应用空间。
