基于漫水填充与环形校正结合的极耳缺陷检测
2022-09-29李林升王庆秋桂久琪
毛 晓,李林升,王庆秋,桂久琪
(上海电机学院电气学院,上海 201306)
锂离子电池具有自放电低、能量密度高、无记忆效应、绿色环保和循环使用寿命长等优点[1]。但锂电池极耳在生产加工过程中很容易受到极耳切割机的影响,出现极耳缺失、极耳褶皱、极耳接带等多种缺陷。目前,许多锂电池生产厂存在检测效率低、人工劳动强度大、对一些细小的缺陷容易出现漏检等情况[2]。
机器视觉检测是一种无触式、无损伤检测的自动检测技术[3]。国内外一些专家学者提出了许多基于机器视觉的锂电池极片缺陷检测方法。胡玥红[1]提出使用Sobel 边缘检测算法结合图像二值化检测极片缺陷,并运用Tucker 机进行极网气泡缺陷分类。李俊男[2]提出基于形态学重建与OTSU 算法分割极耳焊缝缺陷,并采用决策树进行极耳焊缝缺陷分类。陈功等[4]提出采用最大熵阈值算法分割锂电池极片缺陷,并利用GMM 算法实现缺陷目标的识别分类。MA L Y 等[5]提出了一种基于卷积神经网络的检测方法,检测锂电池极片上的水泡缺陷。但目前对极耳切割机切割后的锂电池极耳缺陷检测研究较少,没有发现关于检测极耳缺陷关键参数以及对极耳缺陷进行定位的相关文献。
本文提出环形校正方法并引入机器视觉检测,结合漫水填充算法与图像梯度计算进行锂电池极耳缺陷检测和关键参数计算。
1 锂电池极耳缺陷种类
锂电池极耳正常图像包括涂布和极耳两个部分,如图1(a)所示;锂电池极耳缺陷检测种类主要有极耳缺失、极耳褶皱和极耳接带,分别如图1(b)、(c)、(d)所示。

图1 锂电池极耳检测的种类
2 锂电池极耳缺陷检测流程
锂电池极耳图像采集系统如图2 所示,包括计算机、DALSA 线阵相机、OSE 线阵光源和检测辊,DALSA 线阵相机获取极耳图像,并传输至计算机的检测算法中,最后输出检测结果。锂电池极耳缺陷检测算法的开发平台为Microsoft Visual Studio Community 2019,版本16.8.1,开发语言为C++,PC 主机为AMD Ryzen 5 3500U with Radeon Vega Mobile Gfx 2.10 GHz,内存8 GB,操作系统为Window 10。
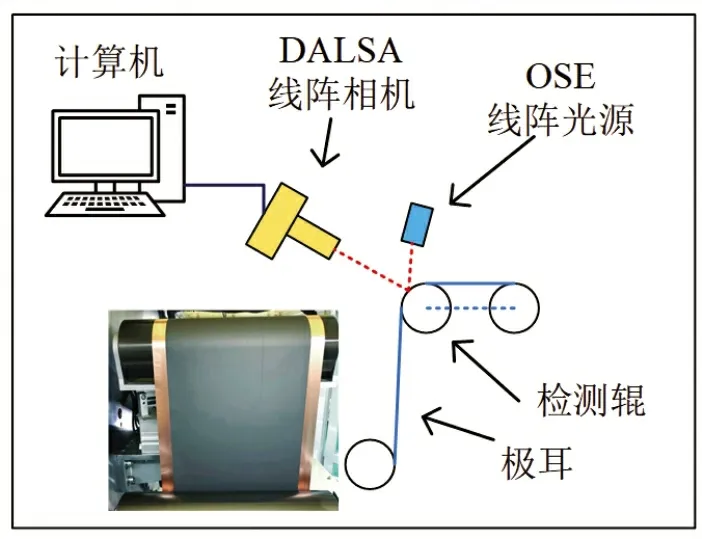
图2 锂电池极耳图像采集系统示意图
锂电池极耳缺陷检测算法流程如图3 所示,包括图像预处理、极耳分割、图像形态学处理、极耳边缘检测、极耳关键参数计算、环形校正法修正极耳参数。

图3 锂电池极耳检测算法流程
2.1 图像预处理
锂电池极耳图像背景区域对后续极耳缺陷分割产生干扰,因此需要对背景区域进行抑制。极耳褶皱时可能会有像素值很低的暗影存在,因此需要对缺陷区域进行增强。本文利用分段线性变换并结合三维立体图像确定像素节点的方法,实现图像的涂布区域不变、缺陷区域增强、背景区域抑制[6],以提升检测算法的鲁棒性和准确率。分段线性变换的公式[7]如下:
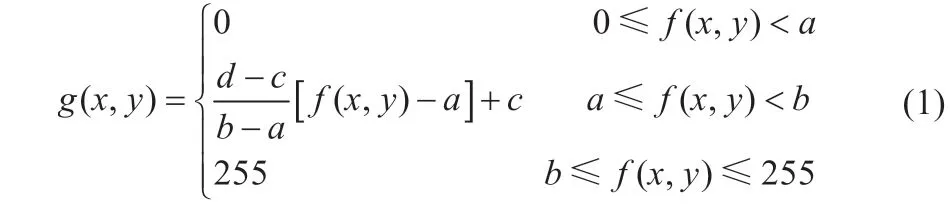
式中:f(x,y)为原始图像的像素值;g(x,y)为分段线性变换后的图像像素值;a、b为原始图像的像素节点;c、d为分段线性变换后图像的像素节点。
原始图像的像素节点a、b,通过锂电池极耳的三维立体与正面确定,如图4(a)、(b)所示,图(a)中的竖轴坐标以及图(b)中的纵轴坐标表示图像的像素值。背景区域像素值一般都很低,因此像素节点a设置为50 可以实现背景区域抑制。缺陷区域可能会有暗影存在,因此像素节点b设置为150 可以达到缺陷区域增强的目的。分段线性变换后图像的像素节点c设置为50,像素节点d设置为150,以实现涂布区域保持不变。
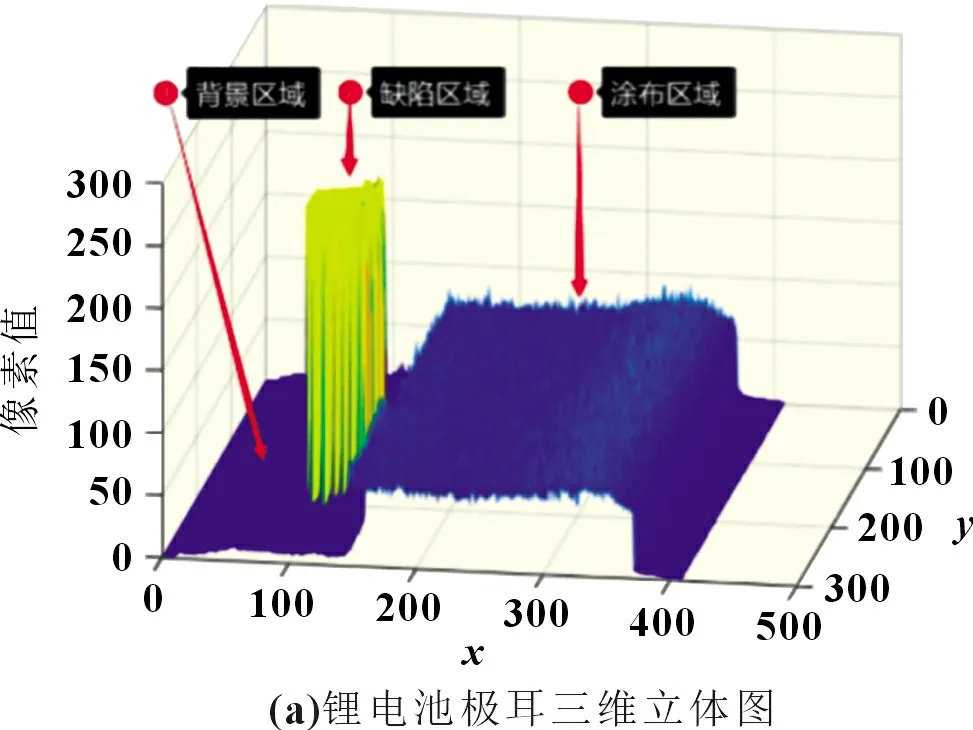
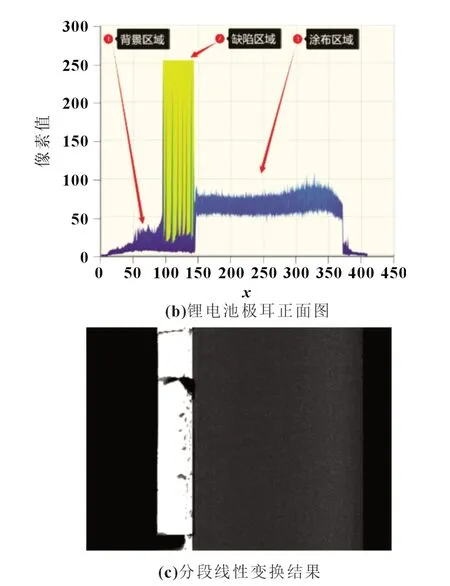
图4 锂电池极耳分段线性变换
相对于采用阈值二值化[8]并结合直方图确定阈值的传统方法凸显缺陷特征,本文设置像素节点值的方法简单和高效。锂电池极耳接带输入图像经式(1)分段线性变换后,结果如图4(c)所示,对比锂电池极耳接带[图1(d)],可知缺陷区域明显增强。
2.2 极耳分割
漫水填充算法[9-10]主要适用于图像内填充区域像素灰度值相近而其与非填充区像素灰度值相差较大的区域。因为极耳缺陷区域与涂布区域存在很明显的分界线,所以采用漫水填充算法进行分割。漫水填充法涉及到三个参数:初始种子点、目标颜色判定规则和替换颜色[11]。考虑到锂电池极耳缺陷检测图像的外形和规格通常是制式化的,因此本算法的种子点选在图像的中心位置,目标颜色判定规则的公式如式(2)所示,替换颜色为背景颜色。
式中:(r,g,b)为种子点的颜色;(R,G,B)为当前点的颜色;Threshold 为设定的阈值,算法中设置为10。
漫水填充处理后的效果如图5 所示,漫水填充可以快速将极耳与涂布进行分割,涂布则变成背景,使极耳可以凸显出来。为说明漫水填充算法的图像分割效果,本文采用OTSU 算法[12-13]和区域生长算法[14]进行对比,结果如图6、图7所示。图6(b)中极耳缺失时,涂布区域被分割,不符合检测目的。图7(d)中极耳接带时,缺陷区域右侧边缘受区域生长停止条件影响,其边缘细节特征保留不完整。
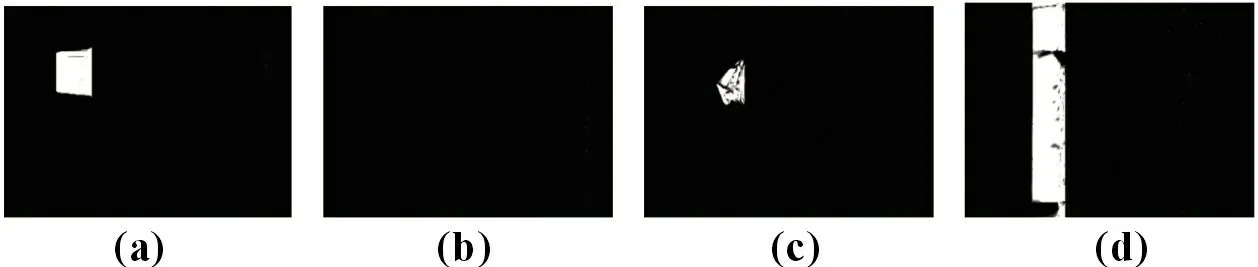
图5 漫水填充算法

图6 OTSU算法

图7 区域生长算法
2.3 形态学处理
经漫水填充算法处理后的图像,由于涂布区域一些像素值高的点没有被填充掉,会出现许多雪花噪声干扰。本文选择形态学处理中的开算子[15]去除雪花干扰。形态学处理的极耳接带对比如图8 所示。为便于观察对雪花干扰的处理效果,对漫水填充算法处理后的雪花噪声进行增强,如图8(a)所示。形态学开算子处理后的效果如图8(b)所示,可以看出雪花噪声干扰被去除。
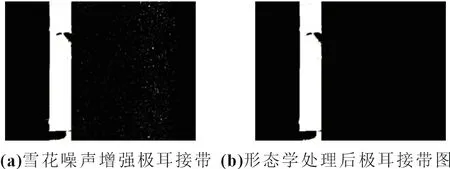
图8 形态学处理的极耳接带对比
2.4 极耳边缘检测
Canny 算子具有很强的抗噪能力,并且定位精确[16]。本文采用3×3 邻域计算梯度幅值,Canny 边缘检测的梯度幅值M(i,j)与梯度方向θ(i,j)计算公式[17]为:

式中:fx(i,j)为水平方向的差分;fy(i,j)为垂直方向的差分。
Canny 边缘检测如图9 所示,对比形态学处理后的极耳图片,Canny 算子可以准确检测其边缘。
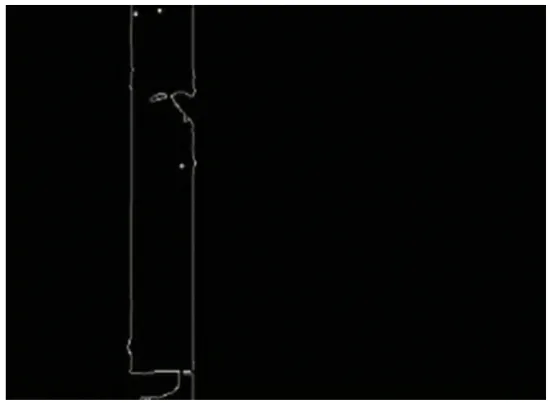
图9 Canny边缘检测
2.5 极耳关键参数计算
锂电池极耳轮廓的关键参数包括极耳缺陷区域面积S和周长C、极耳缺陷区域最大的宽度W和最大的高度H、极耳缺陷区域最小横轴值与最小纵轴值组合TL、极耳缺陷区域最大横轴值与最大纵轴值组合BR,参数TL与BR实现极耳缺陷区域定位。
锂电池极耳缺陷多为形状不规则的多边形,计算出绝对面积和周长很难,因此计算出相对面积和相对周长即可[18]。基于图像梯度计算极耳缺陷轮廓面积与周长,其实质是对像素的累加,数学表达式[15]如式(4)、式(5)所示,计算单位是像素。
式中:S为缺陷的面积;A为缺陷区域;C为缺陷的周长;P为缺陷边缘。
为了便于观察极耳缺陷检测的效果,采用多边拟合的方式在原图上绘制缺陷轮廓,同时绘制缺陷轮廓的外接矩形实现缺陷轮廓的定位。极耳缺陷检测效果如图10 所示,以极耳缺陷图像的左上角为坐标原点,沿图像上边缘和左边缘分别绘制X轴与Y轴。由图10 可知,极耳缺陷区域被整体检测出来,由于算法中有形态学处理和Canny 边缘检测影响S和C大小,外接矩形的线宽影响极耳缺陷区域的TL、BR、W、H等相关参数,检测精度未能达到实际应用要求,需要进一步修正相关参数。
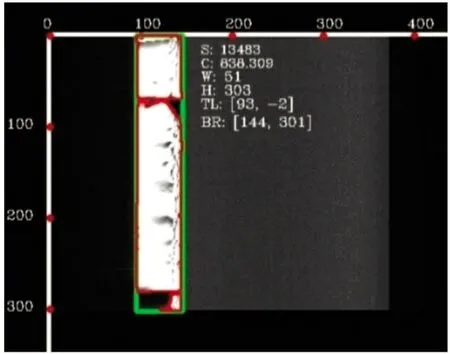
图10 极耳接带检测效果图
2.6 环形校正法修正极耳参数
针对算法处理过程中形态学处理、Canny 边缘检测和外接矩形等影响极耳关键参数的大小,本文提出了一种环形校正的方法提高极耳缺陷的检测精度。
极耳缺陷区域参数S和C修正原理如图11(a)所示,极耳缺陷区域检测边缘与实际的边缘是平行关系,其间隔的环形宽度α是固定值,因此极耳缺陷区域的实际周长C'可以通过检测周长C与固定值δ 的差值得到修正。极耳缺陷区域实际面积S'则可以通过极耳缺陷区域检测面积S减去环形宽度α 与极耳缺陷区域检测周长C的乘积并加上随机参数β得到修正。
极耳缺陷区域参数TL、BR、W和H修正原理如图11(b)所示,极耳缺陷区域实际边缘与外接矩形边缘是平行关系,因此宽度参数ε 为外接矩形线宽和环形宽度之和,极耳缺陷区域参数TL、BR、W和H均可通过参数ε得到修正。
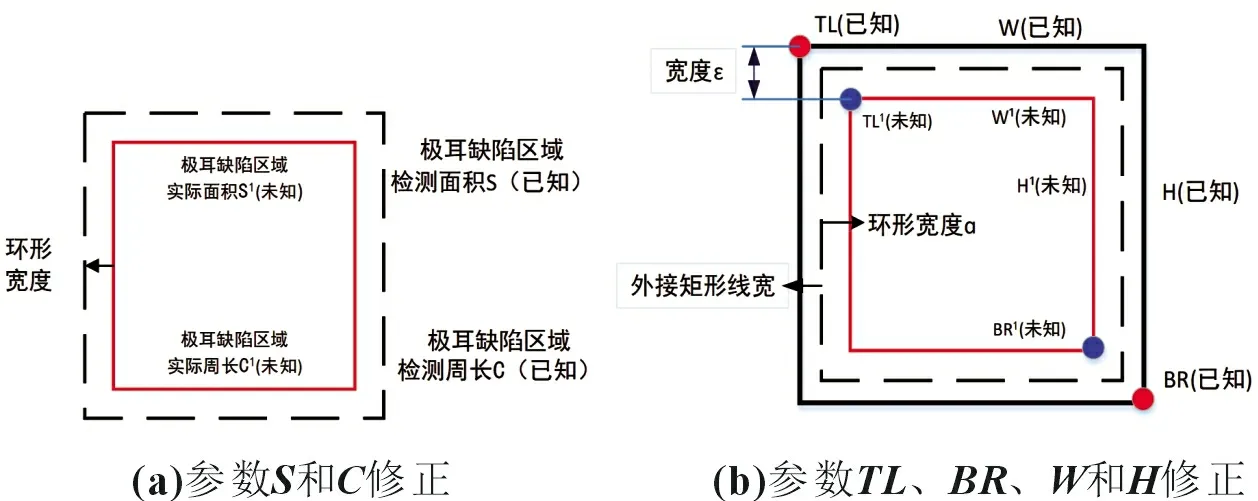
图11 环形校正方法基本原理
综上所述,可得出锂电池极耳缺陷区域参数修正公式:
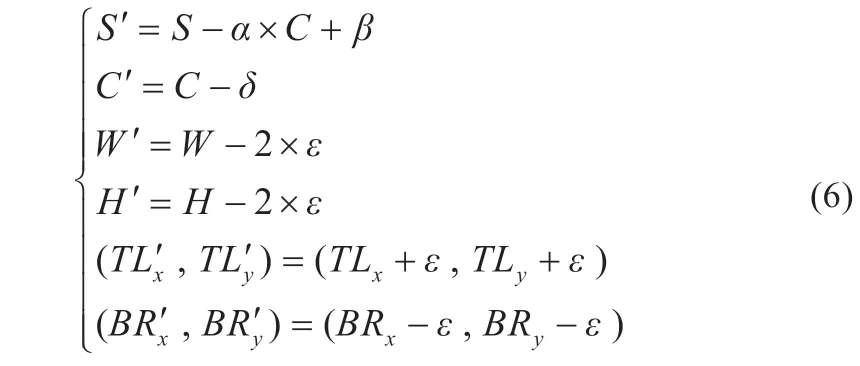
式中:S'、C'、W'、H'、(TLx',TLy')、(BRx',BRy')为修正后极耳缺陷区域的相关参数;α 为环形宽度;β 为随机参数;δ 为固定值;ε为外接矩形线宽与环形宽度之和。
由于极耳缺陷的面积与周长无法确定,所以调用矩形函数绘制标准图像模拟极耳缺陷,其相关参数如表1 所示。无环形校正的算法检测标准图像,输出标准图像检测结果如表2 所示。对比表1 与表2 可以设置环形校正公式(6)中的参数,本文算法设置α=1、β=4.57、δ=5.071 和ε=1.5。参数TL和BR必须为整数,因此TL的横纵坐标实际加2 实现修正,BR的横纵坐标实际减1 实现修正。有环形校正的算法检测标准图像,输出标准图像检测结果如表3 所示。对比表3 和表1 可知经环形校正后检测标准图像的结果与实际标准图像差异非常小,但在实际应用过程中极耳缺陷的边缘是不规则的,会影响随机参数β 值大小,因此本文的环形校正方法只能相对提高极耳缺陷检测精度。

表1 绘制标准图像相关参数
表2 无环形校正的算法检测标准图像相关参数

表3 有环形校正的算法检测标准图像相关参数
锂电池极耳接带经过含有环形校正算法的检测结果如图12 所示,对比图10 可知其锂电池极耳缺陷区域的关键参数均得到修正,相对提高了锂电池极耳缺陷区域的检测精度。
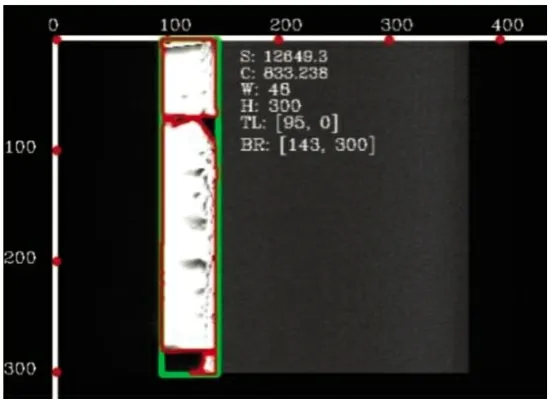
图12 有环形校正的极耳接带检测
3 实验结果与分析
以2 000 个实验样本测试本文算法的准确性。因为本文极耳分割部分用区域生长算法与漫水填充算法均可以实现极耳分割,所以在本文算法基础上保持其他步骤不变,对比两种算法检测极耳缺陷的准确率。
两种算法的极耳检测实验结果对比如表4 所示,可以看出:(1)区域生长算法的极耳检测准确率平均值为75.60%,远低于本文漫水填充算法的极耳检测准确率平均值99.45%;(2)本文算法适用于多种极耳缺陷检测。

表4 两种算法的极耳检测实验结果对比
本文算法检测多种极耳缺陷的效果如图13 所示,(a)、(b)为极耳缺失检测结果,检测极耳缺陷数目为0,表示极耳缺失;(c)、(d)为极耳褶皱检测结果,可以看出暗影不影响极耳缺陷的多边拟合;(e)、(f)为极耳接带检测结果,定位参数TL没有出现负值,说明引入环形校正方法后,检测缺陷的精度得到了提高。
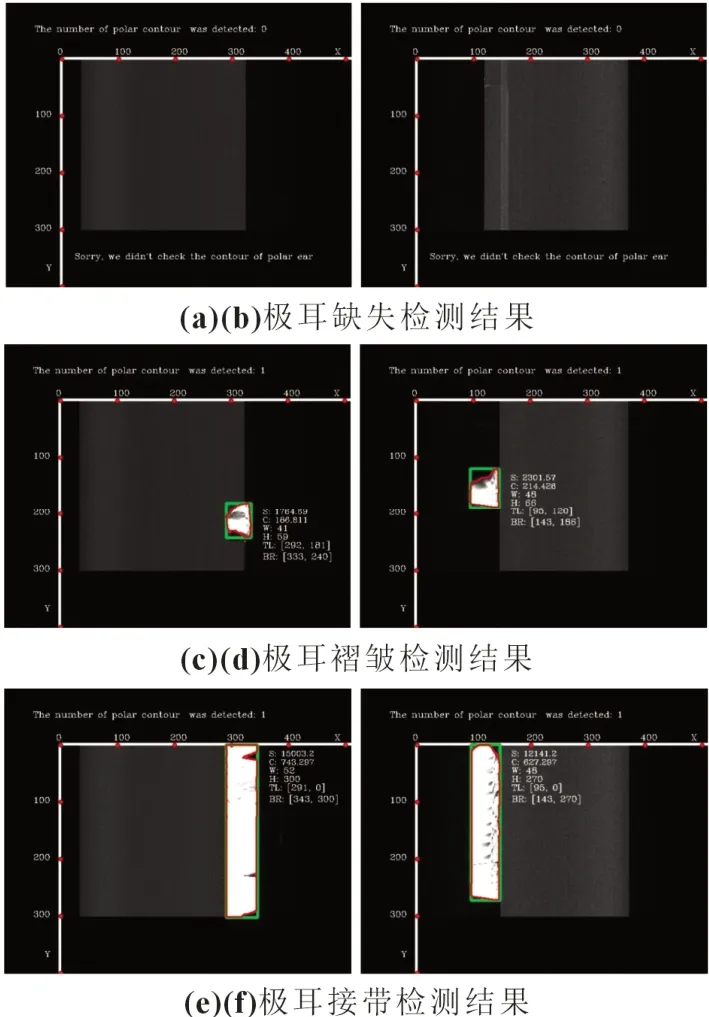
图13 本文算法检测多种极耳缺陷效果展示
4 总结
为了实现锂电池极耳缺陷的自动化检测,本文设计了一种基于漫水填充与环形校正结合的锂电池极耳缺陷检测算法。通过对标准图像的检测实验证明,环形校正方法相对提高了锂电池极耳缺陷关键参数的检测精度。通过对2 000 个样本的检测实验证明,本文算法适用于多种极耳缺陷检测,且能获得较高的准确率。
