基于双环滑模控制的全方位移动机器人轨迹跟踪研究①
2022-09-28车洪磊
车洪磊
(中国安全生产科学研究院地铁火灾与客流疏运安全北京市重点实验室 北京100012)
0 引言
全方位移动机器人具有较好的机动性、任意方向零半径转弯能力以及受限制空间中的移动能力,在家庭生活及工业环境中得到了广泛的应用,如全方位移动轮椅、叉车、机械手等[1-3]。其中,在各种类型的全方位移动机器人中,麦克纳姆轮的移动机器人应用尤为广泛[4-6]。然而,由于麦克纳姆轮的移动机器人使用4 个独立的电机,在面临不确定性及外界扰动的情况下,其运动控制极具挑战。
针对麦克纳姆轮全方位移动机器人的运动控制,国内外开展了许多相关研究工作。文献[7]提出了模糊比例积分微分(proportion integral differential,PID)控制算法,实现了对移动机器人4 个麦克纳姆轮转速的精确控制,但该算法并未对移动机器人的具体方位进行跟踪控制。文献[8]基于麦克纳姆轮的移动平台特性设计了路径跟踪解耦控制方案,采用增量式PID 控制算法分别对移动机器人的位置和角度进行跟踪控制。文献[9]提出了自适应滑模控制器,设计了PID 形式的滑模面,用于麦克纳姆轮驱动的移动机器人轨迹跟踪以获得跟踪性能及鲁棒性能。文献[10]设计了基于反馈线性化方法的运动控制器,通过李雅普诺夫方法证明了其渐近稳定性,然而该算法的控制精度不够。文献[11,12]分别提出了四麦克纳姆轮全方位移动机器人的自适应滑模控制和自适应二阶滑模控制,在一定程度上实现了较高的轨迹跟踪精度,但是控制结构较为复杂。
本文针对目前麦克纳姆轮移动机器人轨迹跟踪控制存在的问题,首先推导出麦克纳姆轮移动机器人的动力学模型,然后利用双环滑模控制方法设计了基于移动机器人动力学模型的轨迹跟踪控制器,最后通过Lyapunov 函数证明该机器人系统的稳定性。
1 全方位移动机器人运动模型
1.1 运动学模型

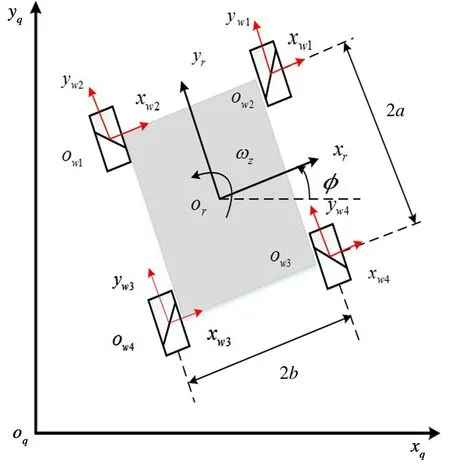
图1 全方位移动机器人简图

移动机器人的逆运动学公式如式(2)所示。

1.2 动力学模型
假设全方位移动机器人在平坦的平面内移动,采用拉格朗日方程建立机器人系统的动力学模型,系统的动能为

其中,vx、vy和ωz分别表示机器人在平面内沿坐标轴的线速度和角速度;m为系统的总质量;Jz为车辆绕z轴的转动惯量,Jω为车轮绕其转轴的转动惯量;υ为粘性摩擦系数。
由于机器人系统的势能等于0,因此其拉格朗日函数可以表示为

移动机器人的拉格朗日方程为

联立式(3)~式(5)得到机器人系统动力学方程为

由于机器人系统面临扰动和不确定性,结合式(6)移动平台的动力学模型表示为

其中,τd∈R4为干扰项。
2 双环滑模控制律设计
采用双环滑模变结构控制设计移动机器人的控制律,使用积分滑模来实现切换函数的设计。双环滑模控制系统结构如图2 所示,该系统由速度环和位置环构成,内环为速度环,外环为位置环。外环滑模控制律实现位置的跟踪,外环控制器产生速度指令,并传递给内环系统,内环则通过内环滑模控制律实现对速度指令的跟踪。
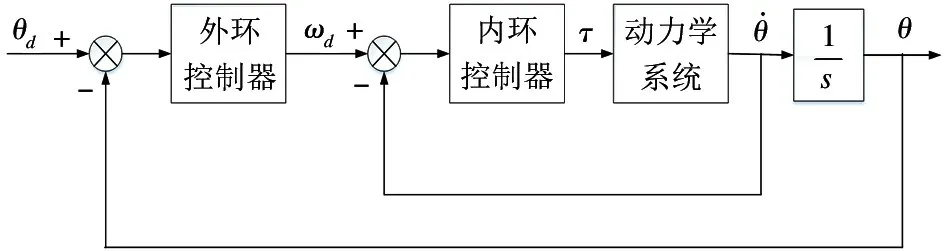
图2 移动机器人轨迹跟踪控制原理图
2.1 外环滑模控制
外环为位置环,设外环控制指令为θd,则外环误差为θe=θd-θ。定义外环滑模函数为

2.2 内环滑模控制
内环为速度环,将外环控制律的输出作为内环的速度指令,则内环指令设为ωd,内环控制误差为

由Lyapunov 稳定性理论可知,系统在扰动和不确定部分存在的情况下是渐进稳定的。
3 仿真实验
为了验证全方位移动机器人双环滑模控制轨迹跟踪算法的有效性,分别以直线与圆弧作为参考轨迹进行跟踪控制。设计外环控制参数为ρ1=5,K1=diag(0.3 0.3 0.3 0.3),在外环控制律中,采用饱和函数代替切换函数,饱和函数的参数取Δi=0.1,i=1,2,3,4。设计内环控制律参数为ρ2=1.5,μ=10,K2=diag(1 1 1 1)。设干扰及不确定部分为τd=[sintcostsin2tcos2t]T。仿真机器人系统的物理参数如表1 所示。
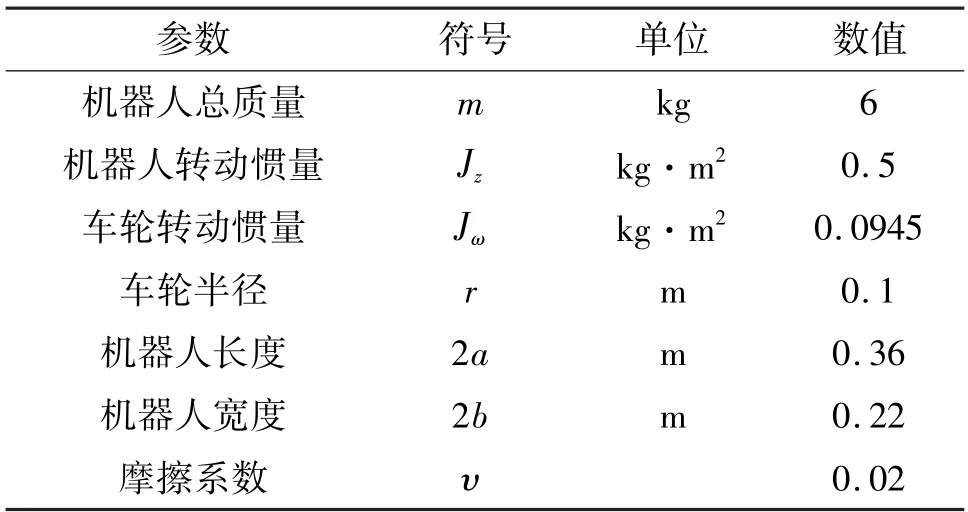
表1 移动机器人参数
3.1 直线轨迹跟踪
仿真部分控制输入为4 个独立驱动的麦克纳姆旋转角度,设置其4 个角度跟踪指令为θd=[10cos0.1t20cos0.1t10cos0.1t20cos0.1t]T,初始角θ0=[15 30 15 30]T,初始角速度ω为0。由运动学模型可知,移动平台在x -y平面内的参考轨迹方程为,t(t≥0) 为仿真时间。图3 为麦克纳姆轮全方位移动机器人的直线轨迹跟踪仿真结果。
图3(a)显示了移动机器人每个车轮旋转角度能够很快地跟踪到目标轨迹。图3(b)显示了移动机器人跟踪目标轨迹时每台电机的控制输入力矩。发生在电机控制力矩的突变主要是由外部扰动产生的,从图3(b)可以看出扰动产生的影响在很短的时间内就能够稳定下来。从图3(c)~(e)可以看出,移动平台从任意初始位置开始运动都能够较快地跟踪到参考轨迹,且位置误差ex、ey均能较快地收敛至0。


图3 移动平台的圆弧轨迹跟踪仿真结果
3.2 圆弧轨迹跟踪
设置角度跟踪指令为θd=[1 0 sin 0. 1t20cos0.1t10sin0.1t20cos0.1t]T,选取初始输入θ0=[12 32 12 32]T,初始角速度ω=0。由运动学模型可知,移动平台在x -y平面内的参考轨迹方程为,t(t≥0) 为仿真时间。图4 为四麦克纳姆轮全方位移动平台的圆弧轨迹跟踪仿真结果。
由图4 可以看出,基于本文中所述的双环滑模控制方法,四轮全向移动机器人对圆轨迹的跟踪效果较好,可以在存在较大初始误差的情况下,确保机器人在较短的时间内实现对期望轨迹的完全跟踪。


图4 移动平台的圆弧轨迹跟踪仿真结果
4 实验验证
为了进一步验证上述算法的实际应用效果,在自主研发的麦克纳姆轮全方位移动机器人平台上进行了轨迹跟踪实验,移动平台实物图如图5 所示。该实验平台以固高嵌入式运动控制器为核心控制器,采用编码器、惯性测量单元(inertial measurement unit,IMU)和StarGazer 定位传感器实现机器人的定位和导航。
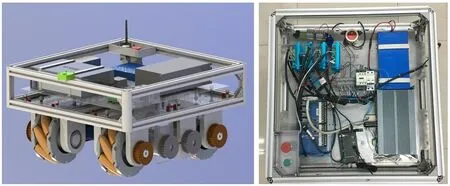
图5 麦克纳姆轮移动平台实物图
设定移动机器人的线速度为v=0.2 m/s,采样周期为0.01s,移动机器人直线和圆弧轨迹跟踪实验的初始位置分别为(330 cm,600 cm)和(310 cm,40 cm),其中圆形轨迹的半径r=100 cm。为了验证本文所提算法的抗干扰能力,实验过程中,分别在直线轨迹(290 cm,210 cm)处和圆形轨迹的(135 cm,-15 cm)处施以外力干扰,改变机器人的运动状态。实验结果如图6 所示。
图6 的实验结果表明,移动平台从任意位置出发都能够较快地跟踪到期望轨迹,并且当机器人在外力作用下偏离期望轨迹时,系统能够较快地做出调整,说明其具有较强的抗干扰能力。

图6 移动平台的实际跟踪结果
5 结论
针对受扰动及参数不确定的麦克纳姆轮全方位移动机器人的轨迹跟踪问题,将双环滑模控制器引入受控系统中,应用双环滑模变结构跟踪期望输出,在Matlab/Simulink 仿真环境验证了该控制算法的可行性。仿真和实验结果表明,利用双环滑模切换函数设计的移动机器人运动控制器在扰动和不确定性存在的情况下能够很好地跟踪到期望轨迹。
