面向恒压腹腔镜手术的云控制过程模型
2022-09-28陈庆奎
乐 涛,陈庆奎,黄 陈
(1上海理工大学 光电信息与计算机工程学院,上海 200093;2上海市第一人民医院,上海 201620)
0 引 言
随着国民经济的飞速发展,医疗环境逐步改善,腹腔镜也成为了一种比较常见的外科手术。自1991年以来,国内腹腔镜手术的应用越来越广泛,尤其是胆囊切除手术在腹腔镜手术中占比很高,所以对腹腔镜手术环境的改进显得尤为重要。传统的腹腔镜手术是在腹部的不同部位切开2~4个小切口,通过这些小切口插入摄像头和各种特殊的手术器械,使医生通过摄像头拍摄的影像,配合各种手术器械在体外完成手术。为了使医生在手术过程中能清楚地观察到患病的部位,需要在腹部的一个切口处充入CO,使腹腔能够膨胀。腹腔镜手术经过30多年的发展,仍是主流的微创手术,既为医生提供了手术操作的便利,也为病人提高了手术的安全性。
通常,在手术过程中,为了能够清晰地看见手术部位,需要医生手控增压,将腹内压控制在12~15 mmHg之间。所谓的增压就是往腹腔中充入CO。在增压的过程中,由于病人体质不同,增压的时间有所不同。如果充入的CO浓度过大,会使病人体内产生碳酸,导致病人手术后产生酸痛。但由于医生的医术水平不同,不能够达到统一的增压标准。所以需要使用大数据技术来改善手术过程。为了完成这项工作,可以在手术器械上安装压力传感器装置,实时监控腹腔的压力值,同时在充气管道上增加一个自动控制阀门,能够自动调节气体的充入量,保证腹腔的压力处于一个使病人舒适的状态。这样即能够使医生在手术过程中有一个清晰的画面,又能保证气压的稳定,从而减少病人的痛苦。但是,单独增加这些装置是不能形成手术过程中的自动控制,故需要使用云控制模型,真正实现自动控制。云控制模型的建立需要收集腹腔镜手术的过程数据,并对其数据进行聚类,形成标准化的手术过程;再按照手术过程事件,对标准化的手术过程切割成标准化过程片段,形成事件与过程片段的对应关系。手术过程事件是手术过程中医生进行的手术操作,例如:快速增压、保持平稳和快速减压等事件。具体手术过程事件定义以及描述见表1。所谓过程片段就是为保证腹腔的压强稳定,手术过程中对不同类型的病人进行腹腔增压的时长或减压的时长数据,这些片段可以通过函数进行拟合得来。目前的腹腔镜手术是通过医生手动控制充气开关,进行CO的充入用来保持腹腔的膨胀。为了将医生手动调节过程转换为自动化调节的过程,实现腹腔压强的恒定,本文提出面向恒压腹腔镜手术的云控制过程模型。该模型针对已有的腹腔镜手术过程数据使用K-means算法,根据病人属性进行聚类,再利用DTW和Apriori算法筛选出强相关的手术腹压变换过程,形成个相似的手术腹压变换过程;对个手术腹压变换过程中,维持腹腔压强恒定的控制阀门开度函数调用记录进行规范化处理,将手术腹压变换过程按照手术过程事件,分解为若干个标准化的过程控制段;对手术过程中使腹腔压强发生变化的操作定义为过程事件集合,使用过程事件集合与标准化的过程控制段集合的笛卡儿积,形成事件-过程控制段键值对集合;在新的手术过程中捕获过程事件,利用过程事件查询键值对集合,利用查询得到的过程控制段控制手术过程。该模型利用机器学习的方法,优化事件-过程控制段键值对集合。

表1 手术过程事件的定义及描述Tab.1 Definition and description of surgical procedures
1 相关工作
与传统的开腹手术相比,腹腔镜手术是外科手术最伟大的进展之一,具有恢复时间短、术后疼痛更轻、并发症更少的优点。腹腔镜手术从手辅式腹腔镜 手 术(hand-assisted laparoscopic surgrey,HALS),到单孔腹腔镜手术,再到机器人辅助腹腔镜手术,逐步走向智能化。从手术的发展可以观察到医疗器械与互联网技术相辅相成。文献[10]描述了运用针镜器械进行微创手术,虽然减少了手术切口面积,但增加了手术时长。苏萌萌等人将机器人与腹腔镜行胃癌根治术后,患者恢复情况进行对照研究,得出机器人系统行胃癌根治术的患者创伤更小、恢复较快的结论。
大数据、云计算和人工智能等技术改变着传统的医疗方式。医疗领域的研究人员利用深度学习和机器学习进行病情的辅助诊断。如:文献[12]利用人工智能搭建的辅助系统,用来进行新冠肺炎(2019-nCov)疑似病例的筛选,增加了诊断的准确性,提升了医生的治疗效率。文献[13]将人工智能用于对糖尿病患者不宁腿综合(RLS)征预测,进行早防御早治疗。文献[14]提出计算机视觉技术以及应用对手术辅助机器人LoA进行了改进。文献[15]提出利用基于DTW距离度量的层次聚类算法,对大规模的时间序列数据进行聚类,即能够取得较好的聚类效果,又能降低聚类的计算量。文献[16]设计实现改进的基于布尔映射矩阵的Apriori算法,并将其应用于医院诊疗数据的挖掘分析。
因此,通过计算机技术实现智能辅助腹腔手术有着非常重要的研究意义。未来人工智能才是单孔腹腔镜技术的发展方向。因此在腹腔镜手术过程中提出了一个新的方案:在腹腔镜手术过程中实现腹腔压强保持恒定。本文利用其它团队在手术过程中收集到的数据以及对前端控制进行深入探讨研究的基础,利用手术过程中的数据分类技术,将机器学习、云计算以及优化理论与手术过程结合,提出一种手术过程中面向恒压腹腔镜手术的云控制过程模型,使得在对不同的病人进行腹腔镜手术时,病人腹腔压强通过阀门的自动调节保持恒定。
2 云控制模型
恒压腹腔镜手术包含前端和云平台控制两个部分。前端的主要功能是进行数据的收集,其中包括:医生手动控制阀门的产生事件E、阀门开度数据对应的关系,以及传感器探测腹腔压强的变化等,将以上数据通过树莓派与后端进行通信,并且将数据存储到云平台。后端的云控制平台利用前端收集的数据构造云控制模型。云控制平台与树莓派进行交互,以达到自动控制阀门开度的目的,实现对前端的控制。一个云控制平台可以和多个前端进行连接,从而能够同时操作多台手术。恒压腹腔镜手术系统如图1所示。
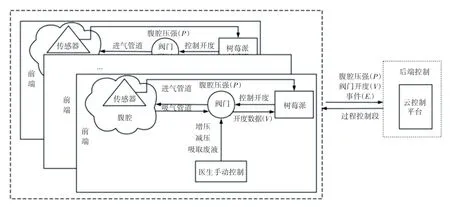
图1 恒压腹腔镜手术系统图Fig.1 System of constant pressure laparoscopic surgery
腹腔镜手术云控制过程如下:首先利用病人基础信息数据集,根据病人的病情和病人生理信息对其使用K-means算法进行分类,再从历史腹腔镜手术阀门开度控制过程(以下简称为手术过程)数据集中选出对应于病人分类的手术过程。使用动态时间扭曲(Dynamic Time Warping,DTW)算法,对手术过程数据进行相似度计算,筛选出相似度较高的手术过程;再通过Apriori算法,对手术过程事件曲线段进行相关性计算,进一步筛选出高度相关的手术过程集合。将筛选出的手术过程集合按照手术事件进行切割,将切割后的过程段进行函数拟合,形成标准的过程手术片段,并且将该类数据集中事件和标准过程手术片段的对应关系,形成事件-过程控制段键值对集合。该集合的作用是:
(1)用来表示该类病人手术过程的过程事件组合。对于一台新手术,根据病人信息,先确定病人所属类别,从集合中筛选出过程事件组合,将过程事件组合反馈给控制系统,从而实现阀门的自动控制,即为新的手术控制过程初始化模块。
(2)对传感器获取腹腔压强的实时数据和目标压强数据进行比较,根据比较值进行事件的确定,再根据事件从集合中选择对应标准的过程控制段,从而进行阀门的自动控制。医生也可以手动选择事件来控制阀门,这就是动态调整过程模块。
通过系统反馈和医生手动过程生成的过程数据,形成实时手术过程数据集。手术完成后,将手术数据更新至对应类别的手术过程数据集中,进而用于之后的手术过程模型的训练与更新。整体模型框架如图2所示,其中包含历史过程聚类、过程标准化、动态调整过程、新的手术控制过程初始化以及过程更新五个主要部分。
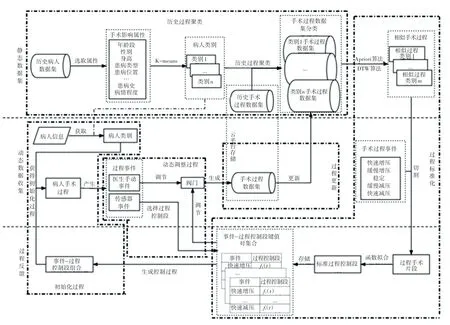
图2 云控制过程模型图Fig.2 Process model of cloud control
2.1 相关定义
腹腔压强()是指人体腹腔压力。在腹腔手术过程中需要给人体腹腔充入CO气体用来稳定气压,从而使医生能够稳定地进行手术。
简称事件。在手术过程中引起腹腔压强变化所产生的事件,腹腔压强变换由阀门开度的变化引起。
事件描述参见表1,每一个事件E包含的属性见表2。
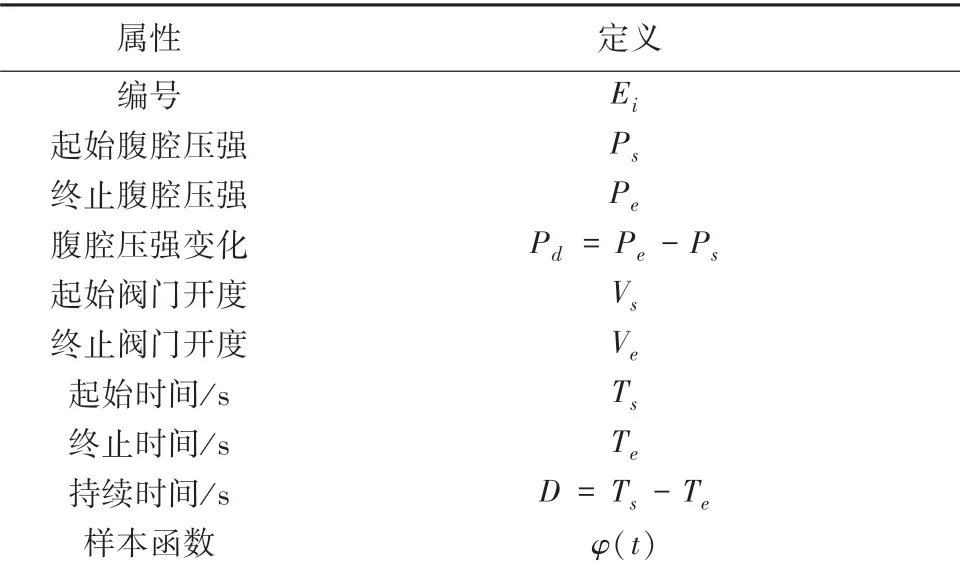
表2 手术过程事件的属性Tab.2 Properties of surgical procedure events
医生在腹腔镜手术过程中,会进行一系列的手术操作,造成腹腔压强的波动。
简称手术过程。为了维持腹腔压强的恒定,就需要调节阀门。阀门在手术过程中开度的变化过程,即为手术控制过程。
由手术过程事件引起阀门开度的变化,一台手术过程由一系列的事件组合而来,将手术按照事件进行切割,形成过程控制段。
在恒压手术过程中,将阀门开度变化按照事件进行切割,将切割后的片段再经过函数拟合形成过程控制段,得到事件过程控制段的集合。
DTW算法和Apriori算法筛选过后的相似手术腹压变化过程,经过事件进行切割后,产生多组过程控制段,将多组过程控制段进行函数拟合,形成标准的控制过程段。标准的过程控制段用阀门控制函数()表示。其中,表示事件,表示阀门开度。
给定一标准控制过程段集合{,,…,f},为维持人体腹腔压强的稳定,需要通过控制充入人体CO气体的量。
定义9 阀门开度() 阀门开度的大小影响充气的速度,从而影响手术过程中腹腔的稳定。
2.2 历史过程聚类
K-means聚类算法是机器学习中的无监督学习的一种聚类算法。根据病人基础信息数据集中的数据,对手术有影响的属性进行one-hot编码、归一化处理、以及数据加权操作。选取的属性及描述见表3。
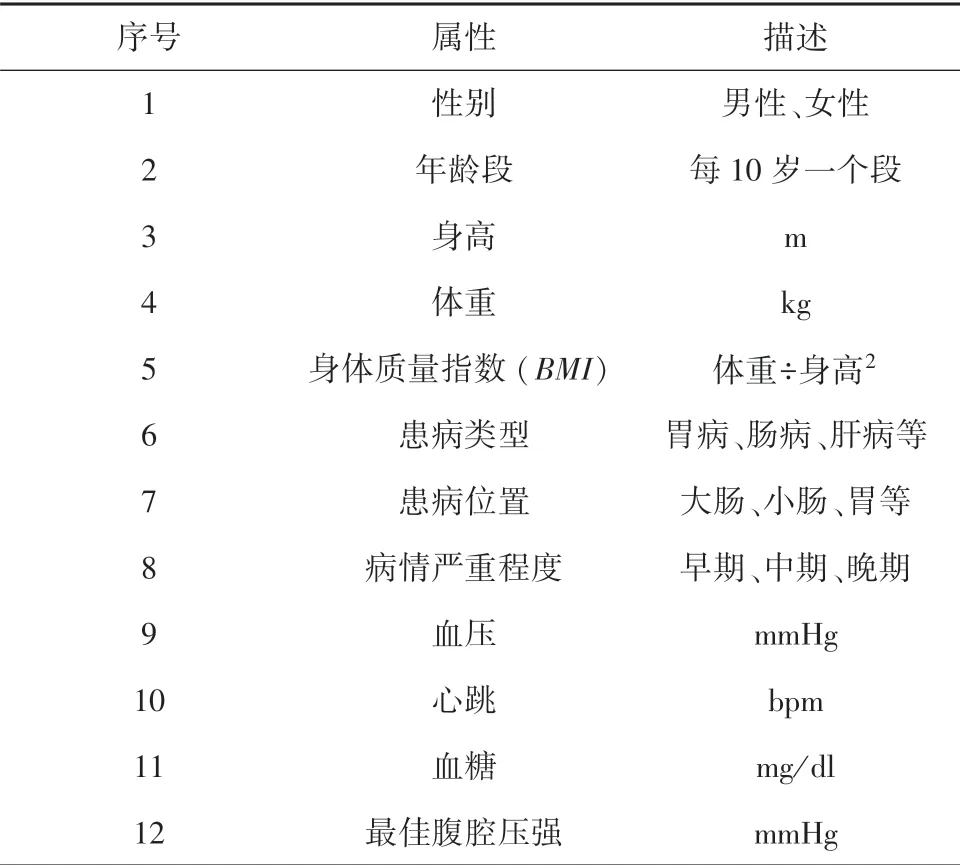
表3 手术影响的属性Tab.3 Properties of surgical effects
基于病人的生理信息,利用K-means算法进行聚类,形成类病人。对各类病人根据其ID编号,从云平台中历史过程数据集的Hbase数据库中,筛选对应恒压腹腔手术的腹腔压强变化()、手术过程事件()、阀门开度()信息。根据病人的分类和筛选,实现历史过程的聚类。每台腹腔镜手术过程数据表示及对应关系如图3所示。
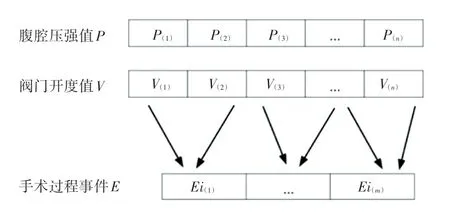
图3 腹腔镜手术过程数据表示及对应关系Fig.3 Representation and correspondence of laparoscopic surgical procedures data
2.3 过程标准化
过程标准化的目的,是将经过K-means分类的类病人腹腔手术变化过程进行标准化。为了实现手术过程标准化,需要进行如下步骤:
将分类后的手术数据,利用DTW算法和Apriori算法进行相似性判断,筛选出具有强相关性的、能代表这一类病人规律的手术过程。
利用对应的手术过程事件切割,得到过程手术片段。

每类病人的腹腔手术变化过程数据包含了腹压变化值()、阀门开度值()以及对应的事件()。为了描述这一类病人的腹腔镜手术过程数据,以每一次的手术过程为一个单元。记录的是该类手术的,对此可表示为:
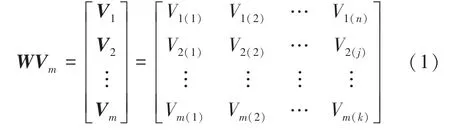
记录的是该类手术的,得到的数学公式为:

其中,表示手术的台数(≥1)。对其可以抽象理解为一个二维数组。因为手术事件长短不同,所以对应的每台手术的记录数据长度也不同。
动态时间扭曲(Dynamic Time Warping,DTW)算法,是目前关于曲线相似计算法中,判断相似效果比较好的算法。DTW是通过动态调整,将时间序列数据进行延伸或缩短后,再计算2个时间序列的相似性。若从WV={,,…,V}选取一个时间序列数据V为标准,其中1≤≤;再从WV选取一个时间序列数据V,其中≠and 1≤≤;V与V的相 似 性 记 为。利用DTW算 法,遍 历WV,计算每条序列与其它所有序列之间的相似度,得到相似度矩阵,如式(3)所示:
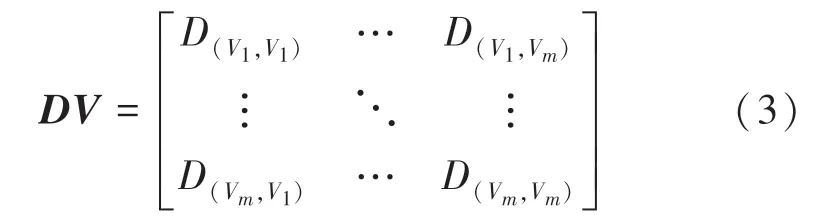
其中,第条时间序列相似度集合定义为DV={,,…,}。
定义筛选相似度的阈值,数学定义公式如下:

遍历DV,得到相似度小于h的时间序列集合,用下标表示DVH={:1,2…,},其中≤。
根据以上规则计算,则可以得到一个(,)的集合。其中,是当前标准时间序列的下标,是相似度小于h的集合DVH。
经过DTW算法处理,得到相似的集合,再通过Apriori算法进一步挖掘多组时间序列之间的相关性。把的进行合并得到一个符合相似度要求的二维数组,表示形式为:

在中需要找出一个或多个支持度最大()的集合,并将这些进行合并,得到一个新的集合。的产生,需要通过改进的Apriori得到。为了保证数据的相关性、充足性,需要通过设置最小支持度(50),以及的最小长度和最大长度进行数据的过滤。其中,05*,。的子集满足以下条件:
(1)子集长度的范围≤≤。
(2)≤SU=BSU。这里,SU表示在长度的情况下,第个支持度最大的子集。
通过Apriori算法,进一步从中筛选出代表这一类病人的阀门开度的过程,将筛选后的记为,WVB={V,V,…,V}。其中,是筛选之后的序列大小,1≤≤。并且从事件数据集中筛选出对应的事件WEB={E,E,…,E}。利用筛选出的WEB,将WVB根据事件进行切割分段,形成过程手术片段。在WEB和WVB中取一台手术过程中阀门变换的数据V和对应的事件E进行事件切割。综上过程具体如图4所示。
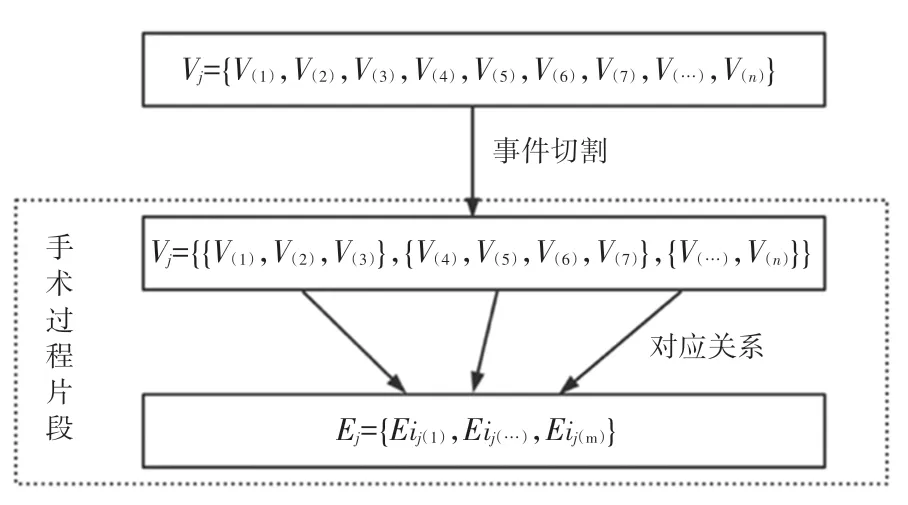
图4 单台手术切割形成手术过程片段Fig.4 A fragment of the surgical process formed by a single surgical cut
2.4 动态调整过程
在手术过程中,医生可以手动控制阀门,形成医生手动过程事件,这些手动过程事件会通过云平台进行记录。因为传感器感知腹腔压强变换的灵敏度要比医生感知迅速,所以还需对阀门控制进行智能动态调整。通过对历史手术过程数据进行过程标准化后,当腹腔压强发生变化时,传感器在系统前端会产生传感器事件、也就是手术过程事件E,此时前端将要执行的事件,通过Tcp网络协议发送到后端,后端在事件-过程控制段键值对集合中选择对应的过程控制段返回给前端,前端根据收到的过程,控制段控制阀门。整个手术过程中,通过控制阀门的开度来保持腹腔压强的恒定,阀门的调节是通过医生手动产生的事件和传感器产生事件通过后端自动控制的2种方式来完成。
2.5 新的手术控制过程初始化
经过聚类、过程标准化后,每一类病人都有着对应的事件序列集WE。按下标统计WE中每个下标出现次数最多的事件,形成初始化事件序列:

根据事件序列,从事件-过程控制段键值对集合中选出对应的过程控制段,这些标准过程控制段对应着阀门开度随事件变化的函数f(),将这些过程控制段中的函数进行组合,得到初始化的标准控制过程段集合{,,…,f}。
当需要进行一台新手术时,通过病人的病理信息获得病人类别,进而从事件过程控制段键值对集合中获得这一类病人的事件序列,得到初始化的标准控制过程段集合。将集合传给前端,前端根据后端返回的集合控制阀门,从而对手术控制过程进行了初始化。
2.6 过程更新
新的恒压腹腔镜手术会产生新的手术过程数据以及对应事件,当完成一台手术后,该台手术的数据就会保存在云平台中,云平台中的数据会更新至手术过程数据集中,手术过程数据集会利用过程标准化模块来更新事件-过程控制段键值对集合。过程更新中,会不断地用到每次新增的手术过程更新事件-过程控制段键值对集合,形成标准的手术过程片段,这是一个学习的过程。过程更新会提高模型的可适用性及灵活性。
3 实验与分析
3.1 实验数据集
实验数据由2部分组成。一是由上海人民医院提供的病人基础信息(见表3),二是对仿真实验手术过程中(如:腹腔压强变化、阀门开度变化以及事件E等)收集到的有效数据。
3.2 实验评价指标
本实验的主要目的是利用云平台中存储的数据,通过聚类、事件切割以及函数拟合,形成标准化的手术过程片段,使手术过程中传感器感受到腹腔压强变换,阀门能够迅速做出响应,从而使病人腹腔处于一个舒适的状态。为了评价云控制过程模型的稳定性,需要用到的评价内容拟展开分述如下。
由于病人聚类的效果会影响后期整体数据的准确性,故需要对K-means算法分类使用Calinski-Harabaz Index评分进行评估,用到的公式可写为:

其中,、分别表示样本数量和类别数量;B、W分别表示类别之间的协方差矩阵和类别内的协方差矩阵;是矩阵的迹。
由公式(6)可以推断,类别之间的协方差越大,类别内的协方差越小,的值就越高,对应分类的效果就越好。
形成标准化的函数,需要对手术片段进行函数拟合,采用均方根误差()对函数拟合的效果进行评价,用到的公式可写为:


建立云控制模型的主要目的是维持腹腔压强的恒定,对云控制模型的评价需要围绕整个手术过程进行。因此,本文提出如下2个评价指标:
(1)时间节省率()。是达到腹腔恒定所用的时间。分别定义医生手动调控阀门达到腹腔恒定所用的时间,以及通过过程控制段达到腹腔恒定所用的时间。研究推得的数学公式具体如下:

(2)稳定率()。是手术过程中,腹腔恒定所占时间的比例。分别定义整个腹腔镜手术时间为、腹腔恒定时间为。研究推得的数学公式具体如下:

3.3 实验结果及分析
云控制模型由5个模块组成,每个模块对应一个实验。实验一是通过K-means算法对历史病人聚类;实验二是将聚类后的数据通过DTW算法和Apriori算法找出相似度较高的恒压手术过程集,按照事件切割过程集,形成事件-过程控制段键值对集合;实验三是根据实验二结果对阀门进行自动化控制;实验四是对新的腹腔镜手术过程进行初始化;实验五是利用新的恒压手术过程数据对实验二的结果进行更新。对此可做重点论述如下。
选取1 000个腹腔镜手术病人的基础信息进行K-means聚类。图5给出了聚类的评分图,当22时,最大、即聚类效果最好。
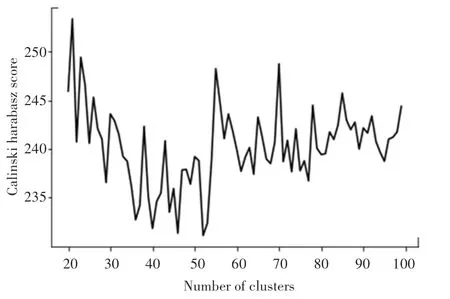
图5 聚类得分图Fig.5 Cluster score
选取实验一中一个病人类别,从仿真的历史过程数据集中筛选出对应的数据进行实验。实验结果如图6所示。阀门开度的范围在0~100之间,仿真腹腔压强在0~1 030 MPa。分析可知,图6(a)中包含了15台腹腔镜手术阀门开度的变化;图6(b)经过曲线相似性判断,筛选了11台强相关的手术过程;图6(c)利用事件切割后形成了37组过程手术片段。表4展示了9组手术过程片段与事件的对应关系,以及拟合函数及其效果。表4中,表示当前事件触发前的阀门开度。
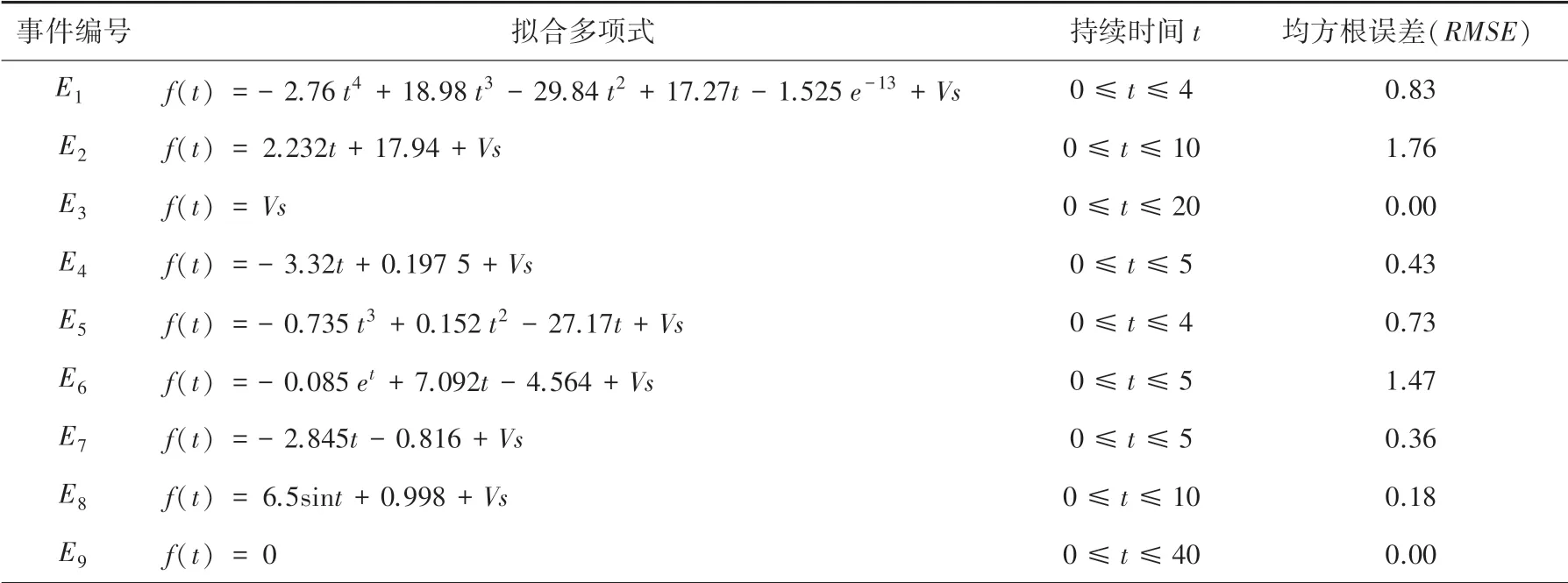
表4 事件-过程控制段对应关系及拟合效果Tab.4 The event-process control segment correspondence and the fitting results

图6 过程标准化模块Fig.6 The module of process standardization
通过事件-过程控制段键值对集合自动控制和手动控制阀门开度的效果如图7所示。从图7中可以看到,自动控制在18 s时达到最佳腹腔压强恒定值,而手动需要22 s才能达到,并且中间经过3次波动才趋于恒定。结果表明,自动控制不但能够提前维持腹腔压强的恒定,而且不需经过波动。
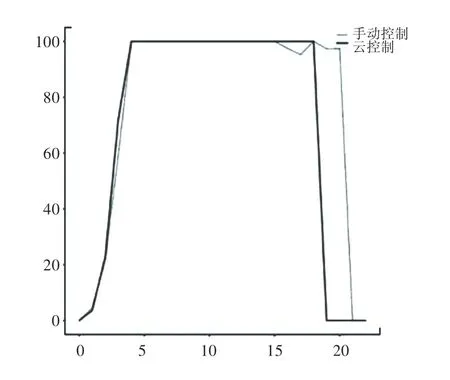
图7 云平台控制与手动控制效果图Fig.7 The effects comparison of cloud platform control and manual control
图8展示了实验二中病人类别对应初始化阀门开度的变化。初始化的阀门开度变化与实验二经过相似性判断筛选出的相似过程数据集相比不仅更加平滑,而且有很高的相似度。采用DTW运算,初始化的相似度值小于对应数据集的相似度平均值,即初始化满足该类病人的整体手术过程。
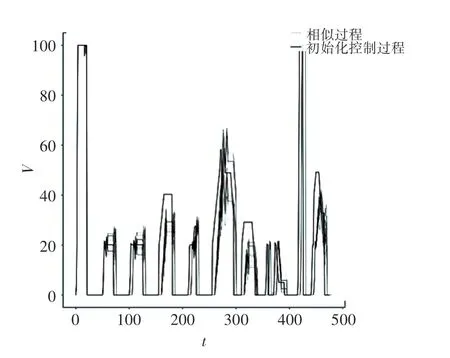
图8 初始化阀门开度变化图Fig.8 Initialization of valve opening changes
图9中加入2组新的手术控制过程,导致出现了新的事件数据,使得事件-过程控制段键值对集合中事件的拟合函数得到了更新。
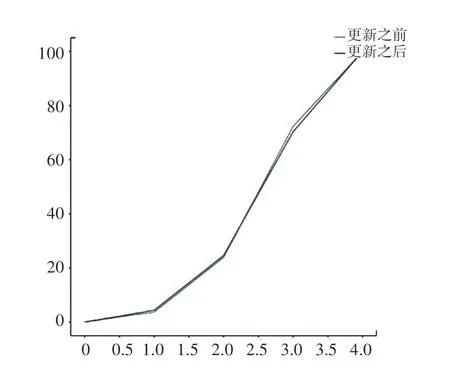
图9 事件-过程控制段键值对集合的更新Fig.9 Updates of key-value pairs of event-process control segment
3.4 云控制模型评估
云控制模型的评估主要分为2个部分,首先进行时间节省率()评估,计算每次腹腔压强发生变换时手动控制阀门开度和云控制阀门开度达到腹腔压强恒定所用的时间。通过对手动控制阀门达到腹腔压强恒定V所用时间与从云平台选择事件控制阀门达到腹腔压强恒定值V所用的时间进行统计后得出其时间节省率见表5。
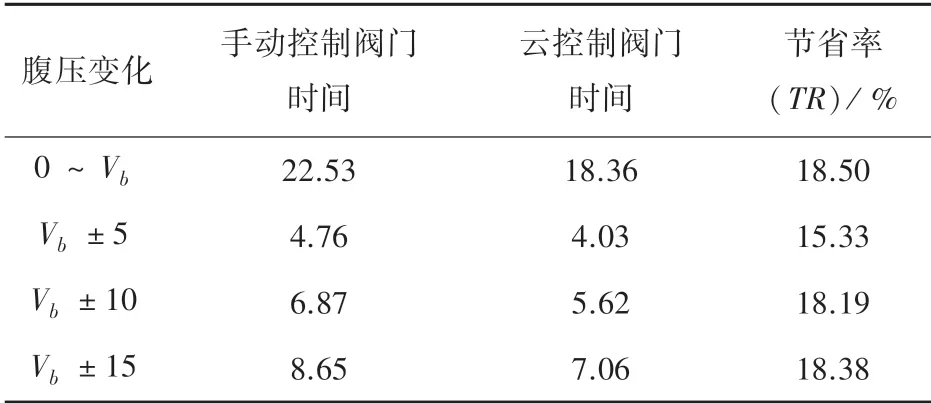
表5 不同方式控制阀门的效果Tab.5 The effects of the valve controlled in different ways
表5展示了当腹腔压强在恒定压强中左右浮动时,不同范围的浮动会调用不同的阀门事件进行阀门的调节。当浮动的范围越大,节省率就越高。因为在持续时间相同的情况下,阀门开度越大,充入的气体越多,所以达到恒定腹腔压强的时间就越短。
在无医生手动操作阀门的情况下,利用云控制模型控制阀门开度进行4组不同手术时长仿真实验,实验数据见表6。

表6 仿真实验数据Tab.6 Simulation experimental data
从表6中得出,手术腹腔压强的稳定率接近90%,不会随手术时间的增长而出现稳定率降低的情况。当传感器发现腹腔压强变化时,会立刻通知云控制平台对阀门进行控制,比医生手动调节更快得到反馈。
4 结束语
本文针对腹腔镜手术过程中维持腹腔压强的恒定,提出一种维持腹腔恒压的云控制过程模型。该模型可以给医疗器械中需要智能控制的硬件提供借鉴,促进医疗器械的智能化、自动化的发展。仿真实验结果表明,该模型不仅能在医生手动控制阀门之前进行自动调节,而且能够保证腹腔镜手术过程中达到近90%的稳定率。然而,仿真实验中,模拟腹腔存在漏气的情况,会导致数据有一定的误差;仿真数据量需要进一步扩充以及增强仿真能力,构建更加精确的云控制模型,为腹腔镜手术提供更好的辅助功能。
