双臂并联机器人运动学正逆解及其奇异位形存在性预测
2022-09-28朱芳甫蒋科坚
王 恒,余 盛,陆 勇,朱芳甫,蒋科坚
(1浙江理工大学 信息科学与工程学院,杭州 310018;2欧姆龙杭州分公司,杭州 310030)
0 引 言
20世纪50年代末,世界第一台工业机器人的研制成功开启了工业生产进入无人化的序幕。人们可以控制机器人从事危险、精细和重复性工作,工业机器人的控制研究越来越受到关注。工业机器人的控制是以运动学正逆解为基础的,因此,在机器人投入工作之前需先求得机器人的运动学正逆解,但是机器人在动作过程中可能会处于一个特殊的位置或形态,此种情况下机器人将无法正常工作,称为奇异位形。本文将针对一种工业机器人—双臂并联机器人,对其运动学正逆解和奇异位形预测展开研究。
对机器人正逆解和奇异性问题的研究旨在实现对机器人精确有效的控制。Gosselin等人提出将并联机器人的奇异类型划分成3种,并利用雅克比矩阵的行列式分别进行判定,利用该方法对5种并联机器人奇异位形进行分析,并从速度的输入和输出的角度给出相应的物理意义。Shao等人采用映射法,以六阶方程的形式给出了三自由度空间并联机械手的正逆解,并基于几何约束条件对该并联机械手的奇异性进行分析,但没有给出位于奇异位形时的物理意义和失控分析。Nag等人针对一种六自由度并联机构,提出了一种用于识别无奇异空间的方法,并求出了该机器人不含奇异位形的工作空间。Baron等人针对冗余并联机器人提出了一种避免奇异位形的几何方法,首先通过确定执行器和奇异点接近程度,然后优化运动学冗余的自由度,再进行奇异点的确定,该方法在一定程度上可以预测奇异位形,避免机器人工作异常。Hijazi等人针对一种平面并联机器人,提出了一种奇异轨迹和奇异位置的识别方法。吕志忠等人将爬壁机器人视为并联机器人,分别利用牛顿法和解析法得出该机器人运动学正逆解,并利用雅克比矩阵和Grassmann线几何理论分析了机器人的正逆运动学奇异位形,并对正运动学奇异位形进行了验证。潘英等人建立了新型五自由度3D打印并联机器人的运动学模型,计算了该机器人的运动学逆解,并利用螺旋理论法求出雅克比矩阵,对奇异性进行了分析。李保坤等人利用逆速度雅克比矩阵和力雅可比矩阵对六自由度Stewart并联机器人的奇异位形进行了分析,并提出冗余驱动法消除奇异位形。常定勇等人设计出了一个两输出的并联机器人,采用闭环矢量法求得运动学逆解,并利用机构的自由度对奇异位形进行了分析。朱伟等人针对弱耦合三平移并联机器人,利用机构原理图推出位置的正逆解,并通过对速度的分析求得机构雅克比矩阵,进一步得出该机器人正逆奇异位形。马广英等人针对3UPR并联机构的4足机器人的运动学问题,通过矩阵变换法求得了机器人的位置逆解,并进一步利用速度模型对奇异性进行分析。周少瑞等人提出一种新型的对称3-CRCR/RPU并联机器人,利用旋转矩阵法以解析式的形式给出了该机器人正逆解,并利用机构雅克比矩阵证明了该机器人不存在奇异位形。叶鹏达等人针对并联机器人奇异性分析问题提出了代数法、几何法、运动学法和现代数学法,并分别进行了详细的分析。
在以往文献中,对机器人的奇异性分析往往从数学计算和矩阵特征的角度给出定义和判断,而对在奇异位形实际可能发生机器人臂失控现象没有对应的描述分析。本文针对双臂并联机器人的运动控制,提出了一套包括正逆解、工作空间确定、奇异位形预测的完整方法,并验证正逆解和奇异位形预测的正确性,对该机器人处于奇异位形时的失控情形进行分析。
1 双臂并联机器人结构
双臂并联机器人是一个闭环结构,其机械结构如图1所示。主要由机架、伺服电机、驱动关节、主动臂、从动臂、从动关节和末端组成。其中,驱动关节和伺服电机相连,通过控制驱动关节的角度,使机器人臂末端按目标轨迹和目标速度移动。

图1 双臂并联机器人结构图Fig.1 Structure diagram of the two-armed parallel robot
2 运动学正逆解分析
双臂并联机器人参数化数学模型如图2所示。图2中,L是双臂并联机器人的主动臂长度,L是从动臂长度,是驱动关节之间的距离,是末端关节之间的距离,左右驱动关节转角分别为、,、是左右驱动关节,、是左右从动关节,、是左右末端关节,为末端中心,坐标为(,)。
在图2结构中建立了2个坐标系,分述如下:
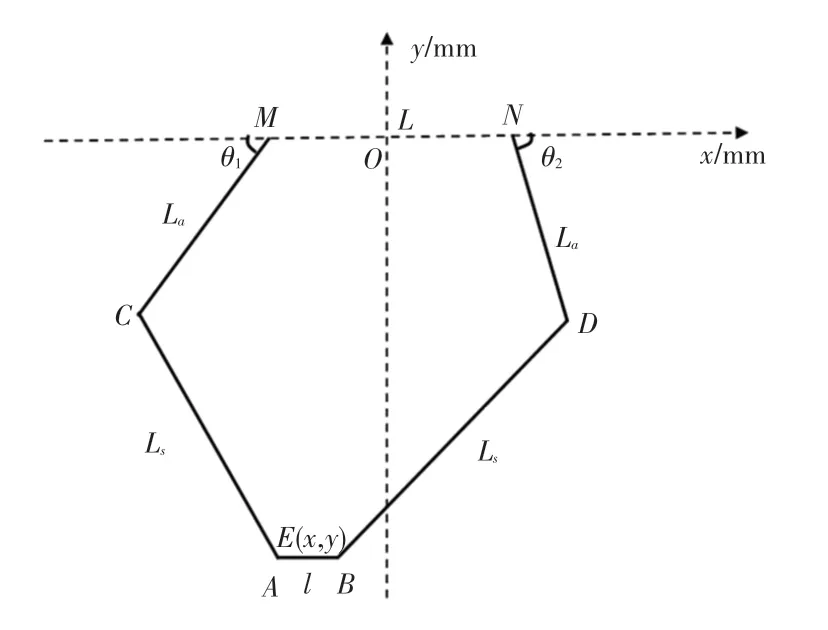
图2 双臂并联机器人参数化数学模型Fig.2 Parametric mathematical model of a two-armed parallel robot
(1)末端二维笛卡尔坐标系(,):以2个驱动关节的中点为原点,即的中点。
(2)驱动坐标系(,):为2个驱动关节的转动角度。当2个主动臂平展时,为零位(0,0),左主动臂逆时针方向为正,右主动臂顺时针方向为正。
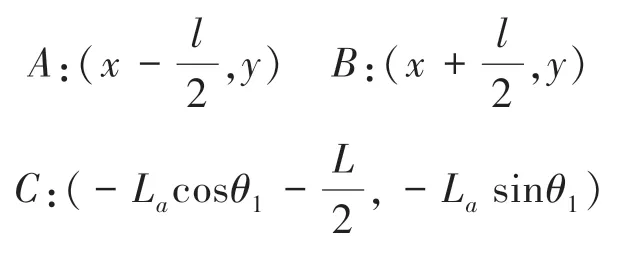
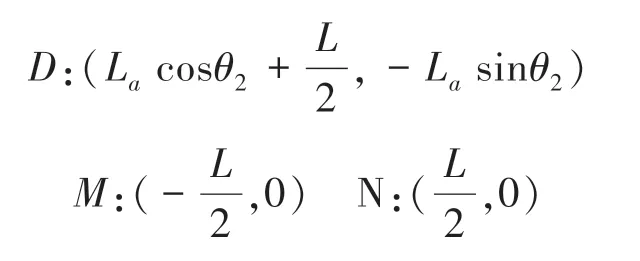
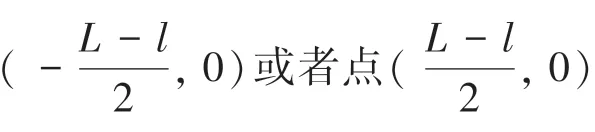
则模型结构关键点对应的坐标为:
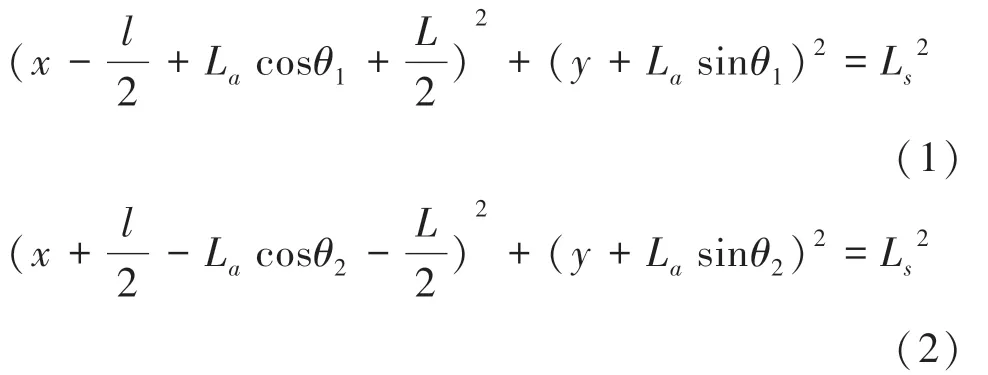
2.1 双臂并联机器人运动学正解
运动学正解就是已知机器人的2个驱动关节的转动角度(,),求解末端中心的对应位置(,)。根据图2几何关系可建立2个二元二次方程(1)和(2),即:
为简化解的形式,设:
解得双臂并联机器人正解为:

因为机器人臂只在末端笛卡尔坐标系的下半部分运行,因此,正解中的正负号只取负号。
2.2 双臂并联机器人运动学逆解
运动学逆解是已知末端中心所处的位置(,),求解驱动关节的转动角度(,)。
令:
对式(1)进行整理,得:
其中,
同理,令:

对式(2)整理可得:

其中,
3 双臂并联机器人的工作空间
机器人的工作空间是指末端中心在末端坐标系平面中所能到达点的集合,即机器人臂的有效工作范围。本文所述双臂并联机器人的实验平台如图3所示,其主要机械结构和对应实际参数,见表1。
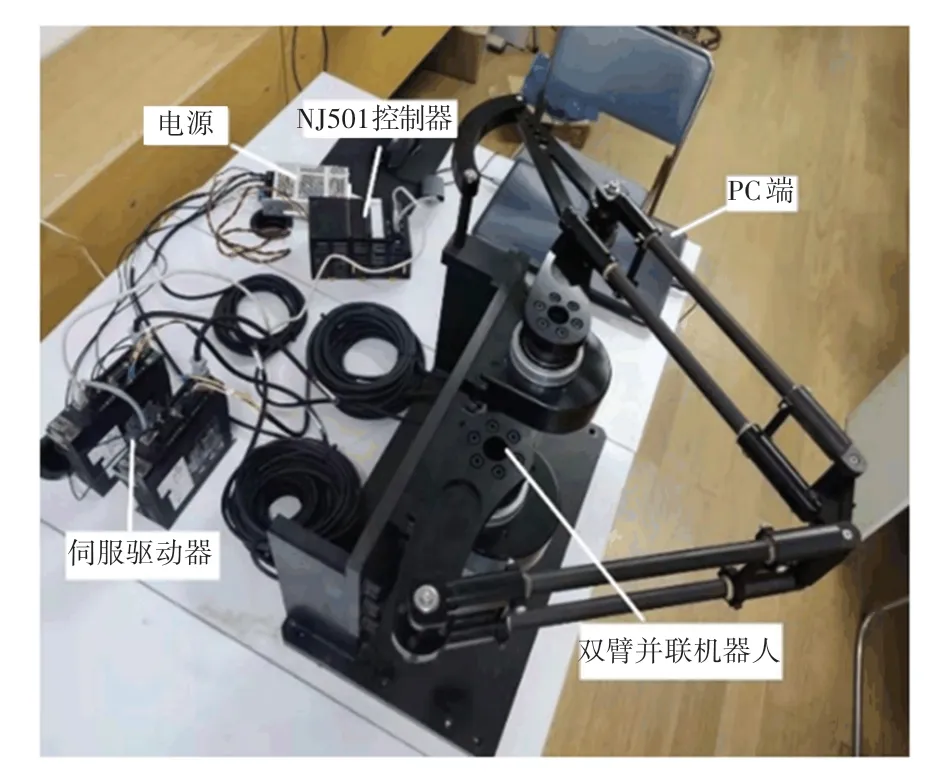
图3 双臂并联机器人Fig.3 Two-armed parallel robot

表1 双臂并联机器人结构参数表Tab.1 Structural parameters of the two-armed parallel robot
在实际操作中,机器人臂的工作空间是根据驱动关节旋转角的实际可活动范围确定的,为防止机器人臂撞到机架,本文实验台的驱动关节转角范围为[-30°,90°]。由此可得机器人臂工作空间,如图4所示。

图4 机器人工作空间Fig.4 Robot work space
4 双臂并联机器人的奇异性分析与预测方法
研究机器人运动发现,当机器人臂处在某一特定位形时,可能会导致该机器人处于不可控的状态。譬如,会出现末端线速度和驱动关节角速度无法对应,并且发生末端自由度数增加或减少的现象,称为机器人的奇异性。因此,对给定机器人对象,判断和预测该机器人结构是否存在奇异位形是非常重要的环节。本文借鉴雅克比矩阵的行列式判定方法,针对双臂并联机器人结构,从理论上对其处于奇异位形时的情形进行分析,并提出奇异位形的预测方法。
4.1 双臂并联机器人的雅克比矩阵
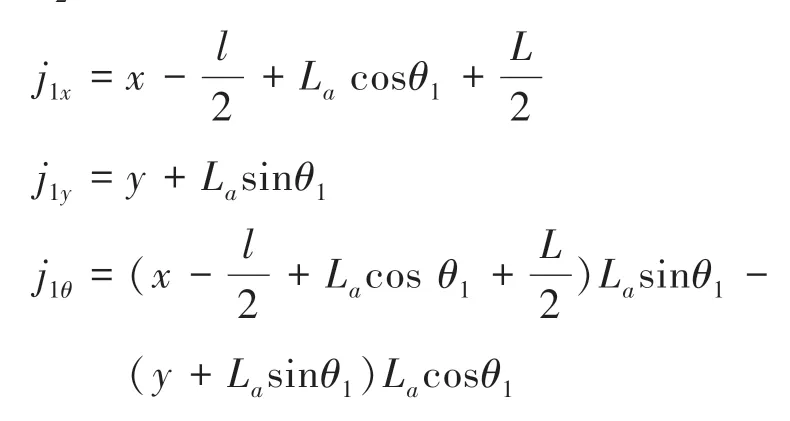
将运动学方程(1)和(2)两边同时对时间求导,得式(3)和式(4):
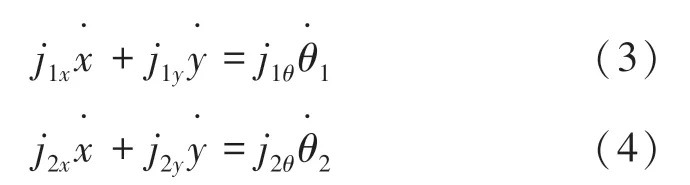
其中, 、 、 分别是方程(1)中、、对时间求导项的系数, 、 、 分别是方程(2)中、、对时间求导项的系数,具体为:

将方程(3)和(4)转化为矩阵的形式,见式(5):
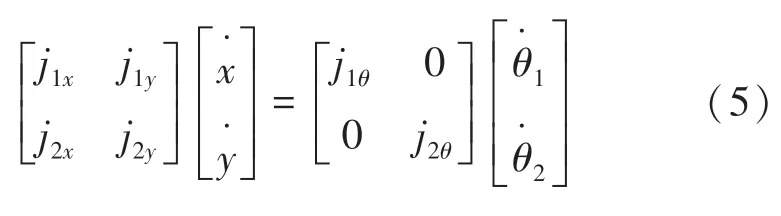
令:

方程(5)就可写为式(6):

其中,J和J都为22矩阵,称为双臂并联机器人的雅克比矩阵。
通过式(6)还可以进一步得出式(7)和式(8):

式(7)是在已知驱动关节角速度的情况下求出末端的线速度。式(8)是在已知末端线速度的情况下求出驱动关节的角速度。
4.2 双臂并联机器人的奇异性理论分析
并联机器人研究认为,奇异性有3种类型。对此拟展开论述如下。
4.2.1 正运动学奇异性
根据雅克比矩阵行列式判定条件,当发生正运动学奇异性时,会表现出如式(9)所示的特征:

式(9)可表述为当雅克比矩阵J对应的行列式为零,而J对应行列式不为零同时发生时,机器人就处于正运动学奇异位形。

4.2.2 逆运动学奇异性
参考式(6)和雅克比矩阵行列式判定条件,发生逆运动学奇异性时,需满足式(10):


4.2.3 混合奇异性
当雅克比矩阵J和J同时不满秩,即满足式(11)时,双臂并联机器人将发生混合奇异性:

当双臂并联机器人处于此种奇异位形时,会同时出现正逆运动学奇异位形发生时的现象。
4.3 双臂并联机器人的奇异位形预测方法
为了能够实现对双臂并联机器人奇异位形的预测,根据式(9)、式(10),可得出双臂并联机器人处于正逆两种奇异位形下的判定条件。
机器人处在正运动学奇异位形的判定条件,推得的数学公式具体如下:

其中,x、x、x、x是图2中、、、在末端坐标系中的横坐标,y、y、y、y是、、、的纵坐标。
机器人处在逆运动学奇异位形的判定条件是,以下2个条件至少满足一个:
5 实验和分析
5.1 实验平台
为验证双臂并联机器人正逆解和奇异位形预测方法的正确性,在双臂并联机器人操作平台进行实验验证,实现控制硬件平台为Omron NJ控制器,软件环境Sysmac Studio。
5.2 正逆解实验验证
本次实验分为2个部分:关键坐标点数值验证和实际轨迹验证。
在验证机器人实际轨迹前,先进行关键坐标点数值的验证,并与实际末端中心位置对比,见表2。
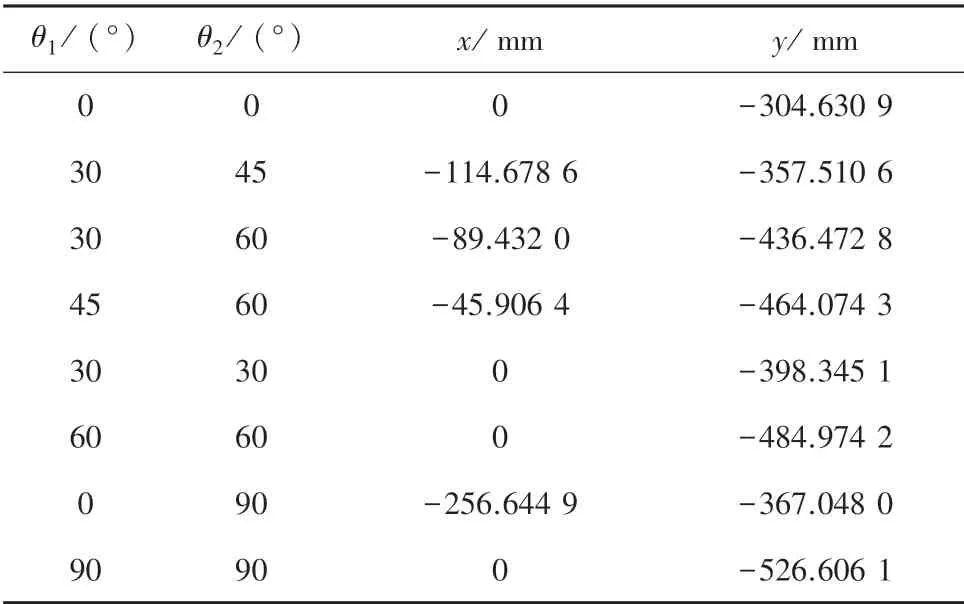
表2 正逆解数值验证表Tab.2 Numerical verification table of positive and negative solutions
在关键坐标点正逆解验证正确后,以一个实际工程使用的工作轨迹,验证整个机器人臂控制完整过程的正确性。该轨迹为一个食品生产流水线的包装盒开箱动作,如图5所示。实验证明,本文提出的正逆解方法是正确的,能够通过驱动关节转角的控制,正确地控制机器人末端运动轨迹。

图5 机器人臂实际运行轨迹图Fig.5 Actual trajectory of robot arms
5.3 奇异位形的预测和实验分析验证
5.3.1 正运动学奇异位形的预测与失控分析
根据式(12)可对正运动学奇异位形进行预测。当、、、位于同一水平线,或者、、、形成一个矩形或平行四边形时,满足正运动学奇异位形的条件,得到的3种情况如图6所示。

图6 双臂并联机器人理论正奇异位形Fig.6 Theoretical positive singular dislocations of the two-armed parallel robot
在图6(a)位形,2个从动臂和末端完全展平时,驱动关节转角(,)将无法控制末端中心坐标(,)的移动;在图6(b)、(c)中的虚线位形,2个从动臂形成了平行四边形,可以自由移动,相当于多了一个不受控制的自由度,此时即使驱动关节转角(,)确定情况下,末端中心坐标(,)无法确定。所以这3种位形属于正运动学奇异位形。
将实验并联机器人的臂长参数代入式(12),可得到驱动关节转角(,)和其行列式值J的关系,三维曲面与行列式值det(J)0平面相交为一条曲线,如图7所示。因此,可以判断,正奇异位型不止一个点,而是相交曲线上的所有点,都为发生正奇异位形的点。

图7 驱动关节角度(θ1,θ2)和其行列式值Jx的关系Fig.7 Relationship between the driving joint angle(θ1,θ2)and its determinant value Jx
在实际的机器人实验台上,可以很容易地摆出正运动学奇异位形的形态,如图8所示。正奇异位形不止一个位置,只要平行于,都是奇异位形。另外,实验机器人由于从动臂长度大于主动臂长度,可知、、、位于同一水平线的位形不存在;相应地,在图7中相交的曲线也未反映出此奇异位形的存在。说明本文方法可以正确预测正运动学奇异位形的存在和姿态。
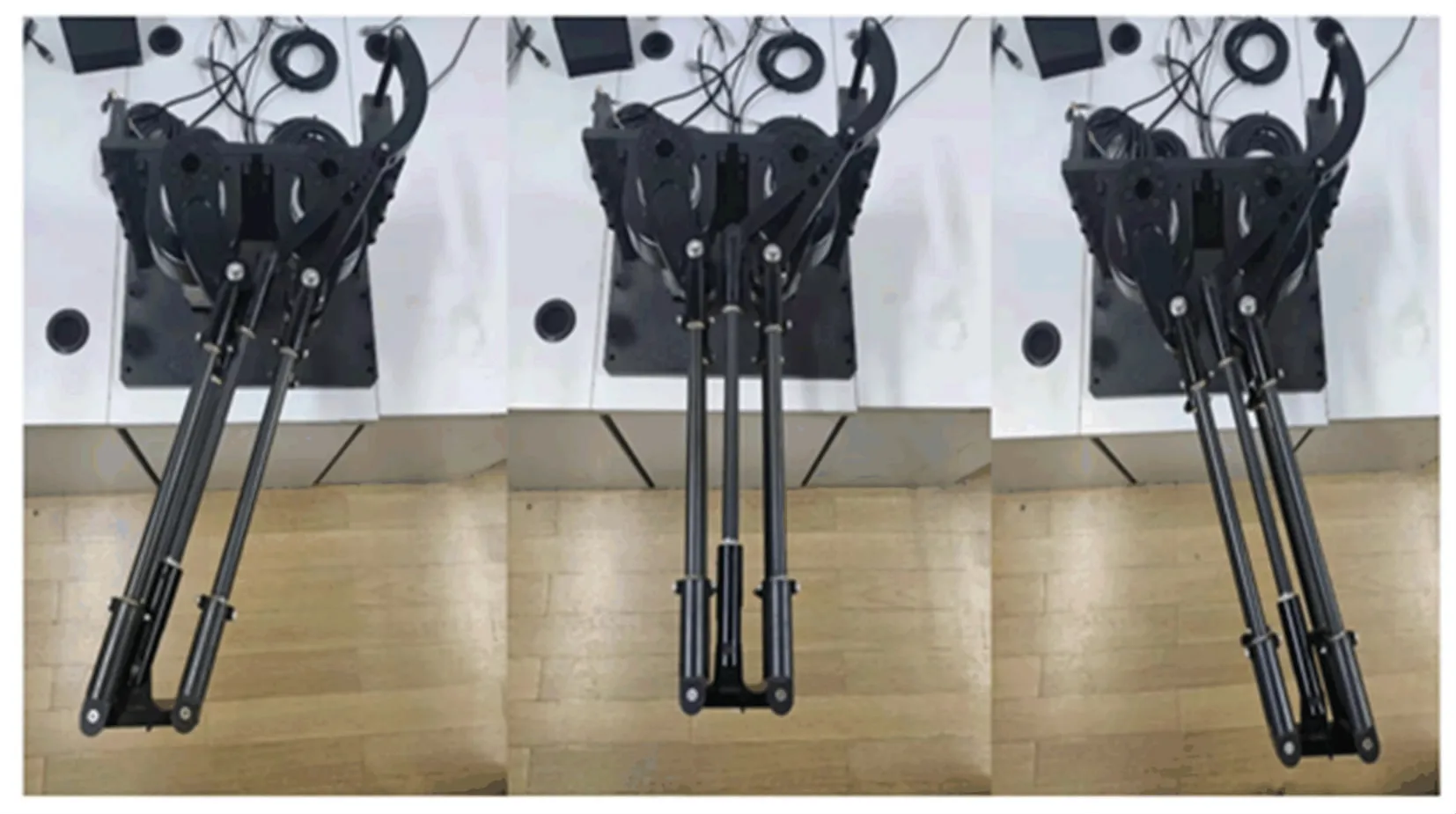
图8 实验机器人存在的正奇异位形Fig.8 Positive singular dislocations in the presence of experimental robots
5.3.2 逆运动学奇异位形的预测与失控分析
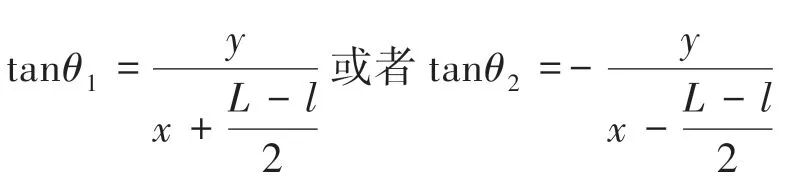
根据双臂并联机器人逆奇异位形的判定条件,可以判断当、、位于同一条直线或者、、位于同一条直线,两者至少有一个成立时,满足逆运动学奇异位形的条件,即只要存在主动臂和从动臂处于伸直状态,机器人就处于逆运动学奇异位形,如图9所示。
对图9中的逆奇异位形做相应分析,当主动臂和从动臂接近伸直状态(呈180°),但还没有完全伸直时,即如图9(b)中的虚线部分,此时,机器人末端已经接近工作空间的边缘。但此时若要求机器人末端以的速度向外移动到工作空间边缘,分析可知,只要在工作空间内,机器人末端肯定可以通过正逆解计算到达工作空间边缘。然而,当要求机器人末端以一个有限大的速度运动到工作空间边缘时,驱动关节需要执行一个无穷大的角速度,显然超过了电机驱动的实际能力。即在此处逆奇异位形,机器人末端在方向的自由度消失了,原因是主动臂角速度的切线方向与垂直,无法提供方向的运动。
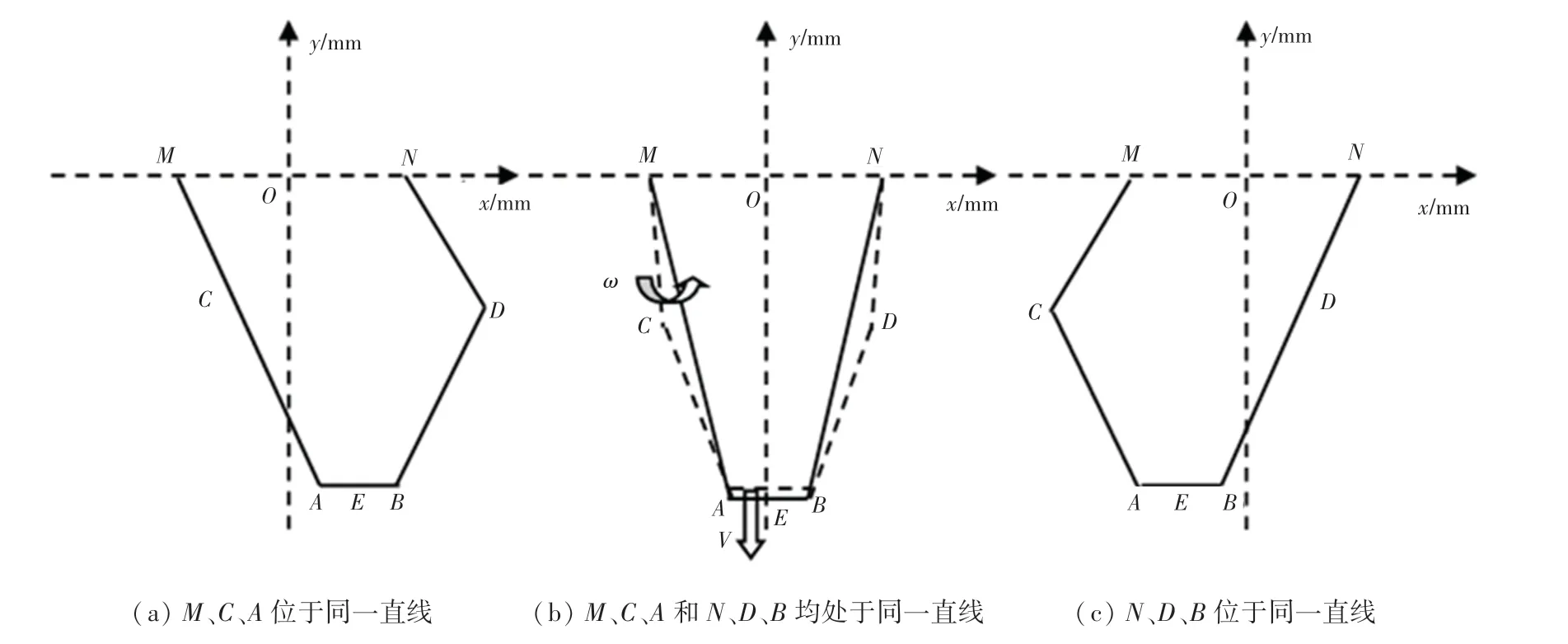
图9 双臂并联机器人逆奇异位形Fig.9 Two-armed parallel robots with inverse singular dislocations
6 结束语
本文针对双臂并联机器人机械结构,提出了用于求取运动学正逆解数学模型的方法,实现通过驱动关节转动角度(,)控制机器人末端中心坐标(,)的运动轨迹,并确定机器人臂的有效工作范围;提出了双臂并联机器人正逆运动学奇异位形的预测方法,给出了明确的判定条件。实验证明了奇异位形存在性预测的正确性,分析了奇异位型所处的物理姿态和失控状况。
