舰船长航时光纤陀螺惯导系统技术及未来发展
2022-09-26胡小毛刘伯晗
赵 坤,胡小毛,刘伯晗
(1. 中国船舶集团公司航海保障技术实验室,天津 300131;2. 天津航海仪器研究所,天津 300131)
舰船惯导系统正朝着“长航时高精度、强环境适应性、集成化低成本”的方向发展。光纤传感技术经过四十余年的技术发展,在近几年形成了加速发展的趋势[1],基于光纤传感器技术的光纤陀螺技术也随之快速发展,光纤陀螺的优势主要包括:一是纯固态,消除了激光陀螺IMU橡胶减震引入的随机误差和倾斜变形;二是实时性好,没有滤波环节引入的时间延迟;三是极低的随机游走误差;四是静默无噪声。随着光纤陀螺精度和稳定性的不断提高、其体积和成本的降低,光纤陀螺惯性导航设备已逐步实现精度全覆盖[2-4]。
舰船惯性导航系统发展的技术途径选择与自身的历史基础、发展方向、惯性仪表特性等情况息息相关。美国考虑了激光惯导长期应用的历史基础,在光纤陀螺的应用方面更加注重强调原有技术体系的继承[5,6];而法国iXBlue公司没有采用系统级技术,始终以元件级技术为推动力,通过改变陀螺环圈直径的技术方案不断提供新产品[7-9]。
本文对国内外高精度光纤陀螺及光纤惯导系统的最新研究进展和发展动态进行了梳理,给出了所在研发团队在高精度光纤陀螺结构设计与仿真、超长细径大直径精密环圈设计、误差抑制与标度提升以及陀螺测试、基于大尺寸长光程光纤陀螺的高精度惯性导航系统旋转调制与运动隔离、热/磁引起的航向效应误差抑制及残差补偿、全球高精度重力场误差模型构建与补偿等方面的最新研究成果,并对高精度光纤陀螺及光纤惯导系统技术发展进行了展望。
1 国外高精度光纤陀螺发展现状
国外公开报道的高精度光纤陀螺长时间零偏稳定性已经达到0.00001°/h量级,研制单位主要包括法国iXBlue公司、美国Honeywell公司等[6,10-11]。
iXBlue公司发布该公司最新的干涉式光纤陀螺的研发路线[12]如图1所示。该公司有序、分步地进行了高精度光纤陀螺的研发,通过增大光纤环圈的直径(从9 cm到50 cm甚至到200 cm)、增加光纤长度(从5 km到15 km)、采用相对强度噪声(Relative intensity noise,RIN)抑制措施提升光纤陀螺精度。设计的直径大小为20 cm、长度为17 km的干涉式光纤陀螺角度随机游走系数(Angle random walk, ARW)理论精度可达0.000001°/h1/2,可满足高精度光纤惯导系统1海里/60天的定位要求。

图1 iXBlue公司干涉式光纤陀螺Fig.1 iXblue giant FOG
2016年,Honeywell公司在Fiber Optic Sensors and Applications XIII会议上报导了该公司现阶段研究的重点放在了高精度、战略级光纤陀螺在惯导系统上的应用[10]。研发的“参考级0.00003°/h”光纤陀螺原型机,该陀螺直径为27英寸,光纤环长度为8公里。对其长达一个月的测试数据进行分析,在未补偿的情况下零偏稳定性可达0.00003°/h,随机游走系数达0.000016°/h1/2。该参考级陀螺样机和Allan方差测试结果如图2所示,基于该参考级光纤陀螺优秀的噪声和零偏性能可用于地球科学传感及惯性设备的校准。

图2 Honeywell公司参考级光纤陀螺及测试曲线Fig.2 Honeywell reference FOG and its Allan variance curve
国外高精度光纤陀螺已经突破超长光纤环圈绕制技术、高水平噪声抑制技术、高稳定光路及热设计等关键技术,实现了在高精度领域的工程应用。
2 国外高精度光纤惯导发展现状
国外研制船用高精度光纤陀螺惯性导航产品的单位主要包括法国iXBlue公司、美国Honeywell和Northrop Grumman公司等。
iXBlue主要开发纯捷联式惯导产品,一直专注于高精度光纤陀螺及系统的研制并已经获得广泛应用,从早期的PHINS系列产品,到面向航海等高精度领域的MARINS系列产品。目前MARINS光纤陀螺惯性导航产品已经形成系列化并在大型水面舰艇、核潜艇等进行列装,逐渐发展成为高精度光纤陀螺的领跑者。图3为MARINS系列产品图。2019年推出的M11定位精度达到1海里/15天[8]。

图3 MARINS系列产品Fig.3 MARINS series product
美国在海军研究处(ONR)和海军战略系统计划部(SSP)的支持下,于1996年启动了采用光纤陀螺作为静电陀螺备份的可行性探索计划,研制战略级光纤陀螺导航仪[5](FOGN)。FOGN所采用的球形平台如图4所示,采用了稳定平台和壳体注入技术,即“全自由度三轴、两个常规常平架、一个混合式热控制系统、一个连续旋转补偿机械编排”的系统方案,不仅完全隔离了外界角运动,还为陀螺提供连续旋转自补偿,原理上可以补偿陀螺漂移、标度因数误差和输入轴的不对准角误差。

图4 FOGN球形稳定平台Fig.4 Spherical stabilized platform of FOGN
以“光纤陀螺”为核心的AN/WSN-12的惯组[6]替代了采用激光陀螺的AN/WSN-7的惯组,系统台体在主体结构不变的原则下,进行了适应性改进设计。一方面有利于技术状态变更所引起牵连工程的风险控制,另一方面采用标准化设计而最大程度保证装备的保障性延续。如图5所示,从外观上能够直观看出,AN/WSN-12相比AN/WSN-7在平台结构设计方面的变化。从其惯性组件外壳增加孔洞等措施可以推断,为适应光纤陀螺自身对温度场、磁场变化敏感的特点,对平台结构进行了必要的改进设计,可能是针对环境扰动进行控制与补偿,抑制内外部环境场态变化对系统性能的影响。

图5 诺斯罗普·格鲁曼AN/WSN-12Fig.5 Northrop Grumman AN/WSN-12
从美国惯性导航装备发展历程看,2022年即将列装的AN/WSN-12仍可能是美国在水面舰艇上验证光纤陀螺作战使用性能的一型过渡型产品,预计未来几年有可能推出基于光纤陀螺的新型惯导系统。同时也从另一个角度表明,光纤陀螺已正式开始进入美国惯导系统的装备型谱,向核潜艇惯导系统应用持续推进。
3 高精度光纤陀螺关键技术及测试
3.1 陀螺结构设计与仿真技术
高精度光纤陀螺在振动环境条件下,结构应力的变化会使敏感线圈产生非互易相移,造成光纤陀螺的输出相位误差(如图6)。结构应力主要有:扭转应力、横向应力、弯曲应力、热应力和振动应力等,非互易相移的改变就是由这些应力导致的应变产生的。

图6 高精度陀螺结构仿真Fig.6 Structure simulation of high precision FOG
为避免高精度光纤陀螺在某个频率范围内出现谐振,必须从多个方面提高陀螺的整体刚度,其中就包括敏感线圈刚度的提升,敏感线圈与线圈安装基体之间粘接刚度的提升,以及陀螺结构零件和整机组合体刚度的提升。
为了进一步提高陀螺的输出精度,必须将陀螺Shupe误差控制在可补偿范围内,而光纤环圈内部的温度场分布直接影响Shupe误差,并且由于环圈内部各涂覆层的材料参数不一致以及热致应力导致的弹光效应也会间接影响Shupe误差大小,因此需进行热-力耦合场分析(如图7),建立可分别反映光纤固化胶、内外涂层以及纤芯的环圈精细化仿真模型,实现对绕环胶体参数(弹性模量以及热膨胀系数)、环圈与金属结构件的结构件粘接方式、以及光纤绕法和环圈窗口尺寸大小直接优化,辨识出最优组合。

图7 高精度陀螺热仿真Fig.7 Thermal simulation of high precision FOG
3.2 超长细径大直径精密环圈设计与制造技术
光纤长度直接影响光纤陀螺精度,而光纤陀螺温度误差与光纤环温度性能直接相关,保证光纤长度的同时减小光纤环尺寸,使光纤环内部温度均匀、温度梯度降低是提升光纤陀螺稳定性能的直接、有效途径,图8为光纤环厚度与温度分布的关系。

图8 多级对称光纤环层数对温度分布的影响Fig.8 Effect of layer number of multistage symmetric optic fiber ring on the temperature distribution
由于超长光纤、细径大尺寸光纤环圈有成环难度大、对细径光纤的要求高、绕制周期长、成本高的特点,成环之前须对绕制所采用的光纤物料进行来料检测与筛选。分别对其进行尺寸、长度、应力分布、消光比等常规检测,在此基础上需进行光纤环圈复绕。同时为降低光纤环圈中非互易误差对其温度性能的影响,光纤环圈成环需采用特殊的多极绕制方案,但无论采用何种绕制方案,光纤环圈绕制每层的边缘均存在“越纤”现象,这种“越纤”对光纤环圈边缘光纤的精密排布会产生非常不利的影响,而且会在周围光纤的内部产生额外的附加应力导致非互异性误差,由于光纤环圈是逐匝光纤精密排列绕制,因此这种影响,会随着绕制层数的增加逐渐累积。如控制不当,会使外层光纤环圈边缘处产生隆起或塌陷,甚至无法继续进行绕制。
对高精度光纤陀螺用环圈而言,在保证精密对称绕制基础上,光纤环圈的用胶性能成为影响非互易性的主要因素。
3.3 误差抑制与标度提升技术
利用半导体光学放大器(SOA)在增益饱和区域放大输入光时强度噪声被压缩的特性,可在ASE光源和光纤滤波器之间增加半导体光放大器。通过调制ASE光源输出光功率、控制ASE光源波长,调整SOA的驱动电流及温度工作点使SOA工作在饱和放大区,降低光源进入光纤陀螺的相对强度噪声(如图9)。

图9 采用增益饱和SOA抑制强度噪声Fig.9 Using gain saturation SOA to suppress intensity noise
通过采用宽谱光源降低高精度光纤陀螺背向散射等误差,提高信噪比。但是由于光谱不对称的影响导致陀螺的角速度误差随输入转速呈规律性分布,光纤陀螺标度因数线性度会降低。宽谱光源在温度环境下平均波长的变化量与标度因数变化量成正比,平均波长的变化将引起标度因数产生同比例的变化。光纤陀螺整体光路在温度环境下光源光谱、无源光学器件的损耗谱变化都会导致到达探测器端平均波长发生变化。
高精度光纤陀螺关键敏感环圈由于温度环境影响,环圈骨架、光纤、光纤环中的绕环胶、粘接胶等材料的热胀冷缩及缓慢蠕变均会导致光纤环平均直径发生变化。为提高光纤陀螺的标度性能,需要补偿整体光路波长变化,降低光路器件及熔点损耗谱对平均波长的影响。
3.4 陀螺测试技术
高精度光纤陀螺准确的性能测试易受到测试场所、测试条件的影响:建筑物的振动、人类的活动、较高频噪声对陀螺噪声尤其是ARW的测量产生影响;测量场所的电磁环境、温度环境对ARW的测量产生影响;不同的测试速率、平滑时间、环境温度的扰动等都会带来干扰。
为了避免城市环境等外界干扰带来的影响,精确评价陀螺性能,课题组在某山区岩洞中对研制的高精度光纤陀螺进行了极限性能摸底实验,实验环境温度为16.0±0.1℃,湿度100%。测试结果如图10所示,研制的高精度光纤陀螺Allan方差探底值达到0.000005°/h。

图10 某岩洞Allan方差测试试验Fig.10 Allan variance test in the cave
4 舰船高精度光纤惯导系统技术
从国外高精度光纤陀螺导航系统的研制历程来看,其基本思路和策略主要有两种:一是不断提高惯性元件本身的精度与可靠性;二是在提高元件精度的同时,采用误差补偿等系统级技术来满足高精度的要求。其中,美国针对高精度光纤惯导的工程应用,倾向于采用平台式和旋转调制等“系统级”技术,其采用平台式和旋转调制技术的系统方案具有更高的精度潜力,同时,考虑了激光陀螺惯导长期应用的历史基础,在光纤陀螺的应用方面更加注重对原有技术体系的继承;iXBlue倾向于纯捷联的技术方案,始终以“元件级”技术为推动力,通过改变光纤环圈直径的方法不断推出新的产品,产品的应用范围较为广泛。
本文研制的高精度光纤陀螺惯导同时从元件和系统入手,在自研大尺寸细径高精度光纤陀螺的基础上,采用“平台隔离干扰、捷联解算导航、旋转抑制误差”的系统技术方案[12,13]。在“平台式”惯导基础上,集合了现有“捷联式”和“旋转式”惯导的优点,理论上除随机游走误差的影响不能抑制外,其余所有的误差影响均可得到抑制,而随机游走误差小正是光纤陀螺的技术优势。
4.1 平台式光纤陀螺惯导旋转调制与隔离技术
基于导航系跟踪的平台旋转调制技术的实现途径如图11所示。旋转式系统自动补偿误差的本质是周期性改变姿态矩阵值,从而使短时间内的误差传播方程中数学平台误差项均值接近零。不同的旋转调制方案对系统的各种误差因素的调制效果也有很大区别,因此要从多方面对旋转调制方案进行综合分析,以选取最佳的旋转方案。一种适合的旋转调制方案应达到以下效果:一是要调制所有惯性元件的常值漂移误差对导航解算的影响,同时不引入旋转带来的新的导航误差;二是避免安装误差、标度因数等惯性器件误差造成的导航误差,选取合适的导航坐标系抑制地球自转与标度因数误差耦合引起的随时间积累定位误差;三是尽量延长转停时间,增加旋转式系统的可靠性、提升导航信息的品质。

图11 基于导航系跟踪的平台旋转调制Fig.11 Rotation modulation technology based on platform tracking coordinate system
图12 为旋转调制前后光纤陀螺等效漂移Allan方差变化曲线,通过设计合理的旋转调制可以延长光纤陀螺等效漂移Allan方差的探底时间、提高探底精度、抑制翘尾误差。运用Allan方差分析法可将光纤陀螺零偏误差与光纤惯导定位精度建立起联系,使惯性元件和系统的研制具有更明确的指向性。

图12 旋转调制前后Allan方差曲线Fig.12 Allan variance curve before and after rotation modulation
4.2 热/磁引起的航向效应误差抑制及残差补偿技术
光纤陀螺惯导所选技术方案具备平台式系统的相关特点,框架通过陀螺稳定回路的方式实现惯性台体隔离载体角运动,当运载体航向角向一个方向大角度连续旋转时,台体相对于航向轴外围的机械构件和机电元件的几何位置将发生变化,使得台体周围的温度场、磁场及振动环境发生改变,同时也可能引起陀螺和加速度计的附加航向效应误差,使惯导输出信息产生误差(如图13)。

图13 “航向效应”误差影响Fig.13 Effect of heading error
根据航向效应的特点,在采取技术途径时无法限制运载体的大角度旋转,主要考虑抑制台体周围各场态变化和切断影响因素传递路径,更大限度减弱乃至消除航向效应。图14为热/磁引起的航向效应误差抑制及残差补偿技术途径原理图。

图14 热/磁引起的航向效应误差抑制及残差补偿Fig.14 Error suppression and residual compensation of heading effect caused by heat and magnetism
4.3 全球高精度重力场误差模型构建与补偿技术
在超高精度惯性导航系统中,重力扰动误差的影响逐渐凸显出来[14,15],成为超高精度惯性导航系统中一个主要的误差因素。
本文采用基于重力场球谐模型的高精度垂线偏差解算方法,实现垂线偏差补偿技术的工程应用。图15为某次跨大海域航行试验期间利用全球重力场模型获取的航行路径上的垂线偏差,图16为研制的高精度光纤惯导系统跨海域航行试验期间采用垂线偏差模型补偿重力扰动前后归一化的纬度误差曲线。
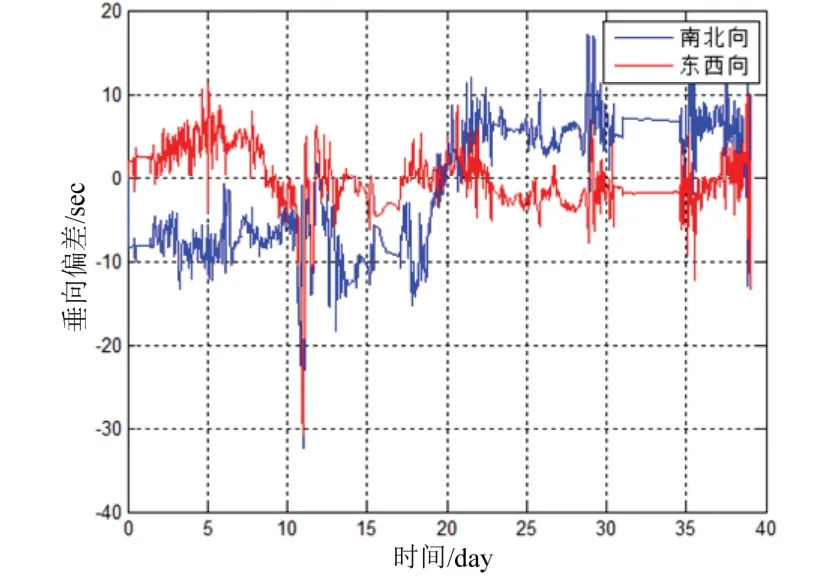
图15 垂向偏差Fig.15 Vertical deviation

图16 补偿垂线偏差前后纬度误差Fig.16 Latitude error before and after compensating vertical deviation
4.4 系统试验
本文研制的高精度光纤惯导自2018年开始共研制了两轮样机,2020年搭载某水面船开展了跨大纬度、长航时、大海域试验,完成了全部单项技术验证,水面试验归一化结果如图17所示。

图17 水面航行试验定位误差Fig.17 Position error of surface navigation test
航行轨迹如图18所示。针对水下导航应用开展了第二轮工程化样机改进研制工作,2021年首次开展并完成多轮水下长航时试验,系统连续自主导航最长时间90天,试验归一化结果如图19所示,结果表明研制的高精度光纤陀螺惯导系统位置误差符合发散规律,整体导航定位精度可满足水下长航时自主导航的需求。

图18 长航时海上试验航迹Fig.18 Track of sea test
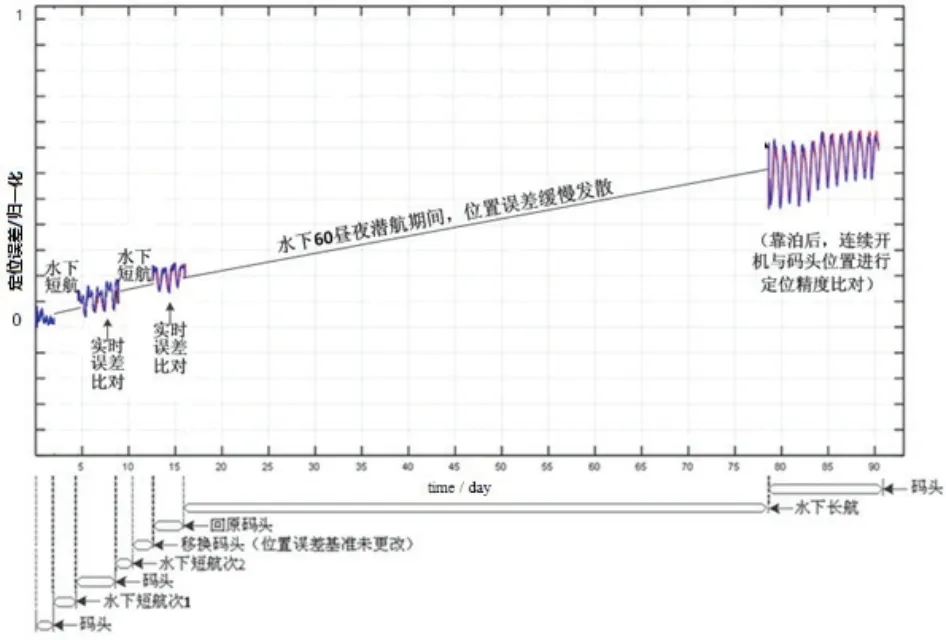
图19 水下航行试验定位误差Fig.19 Position error of underwater navigation test
5 高精度光纤陀螺及惯导系统发展展望
光纤陀螺及惯导系统历经多年发展已经取得应用,通过对近年来研究现状和发展动态的梳理,我们展望未来,形成如下认识:
(1) 目前国内高精度光纤陀螺亟需在以下方面持续突破:一是加强高精度干涉光路设计与优化,抑制光纤光路中的相对强度噪声、偏振误差、背向散射,进一步量化分析热电磁场耦合因素对陀螺精度的影响;二是超长光纤环圈精密绕制及标度提升技术亟待攻关,尤其是高精度光纤陀螺标度因数,需要对影响标度的诸多因素如环圈尺寸稳定性、匹配胶体材料、传输光谱测试控制、闭环控制参数优化等进行深入分析研究和持续改进。三是完善高精度光纤陀螺及配套器件测试技术研究,比如增加陀螺标度因数年稳定性、年重复性等长周期性能指标考核,建立更贴近系统应用的测试方法,确保光路传输过程中的光谱稳定和敏感轴稳定性,搭建更高精度陀螺的低噪声、低标度误差测试环境及测试平台。
(2) 为满足未来超长航时自主高精度导航需求,需进一步降低光纤陀螺随机误差,延长其Allan方差探底时间、提高探底精度;开展基于新型大尺寸长光程光纤陀螺的超高光纤陀螺惯导系统的研制,进一步延长导航系统重调周期、提升导航信息品质。
(3) 基于高精度重力场模型的衍生信息—高精度垂线偏差成为重要的海洋环境信息参量之一。全海域的高精度重力场数据库是高精度惯导提升全海域性能的关键,也是水下重力辅助导航的依据。结合下一代高精度的深空重力卫星计划,全面提升全球范围内重力场测量精度,支撑超高精度自主导航领域的未来应用。
(4) 超高精度惯导系统自主导航时间未来将以数月甚至年计,地球自转周期(角速率)月或年的长周期性变化将直接引起等效漂移,对导航精度的影响也变得不可忽略,后续需进一步深入开展专题研究。
